, Available online , doi: 10.1109/JAS.2026.125963
Abstract:
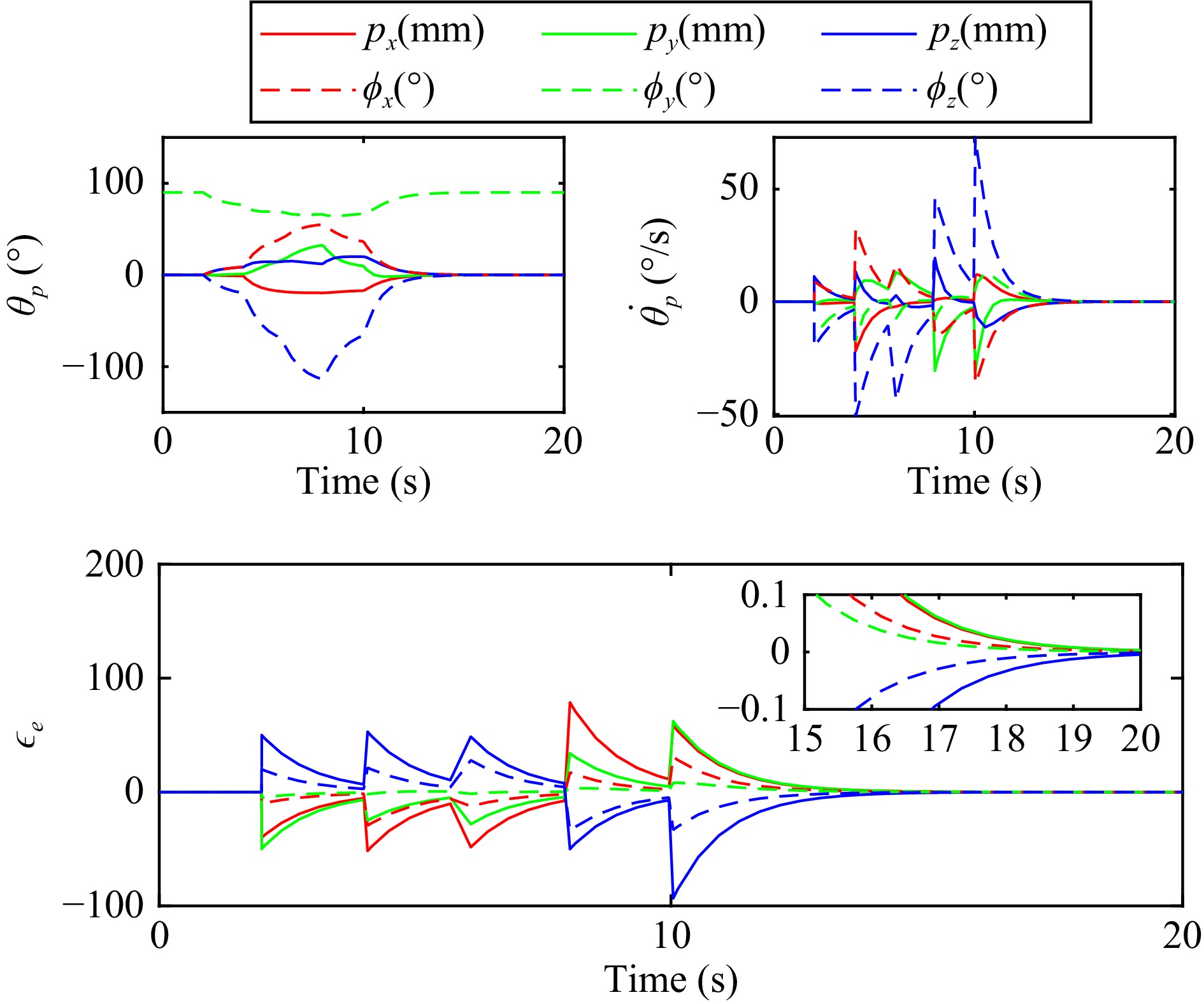
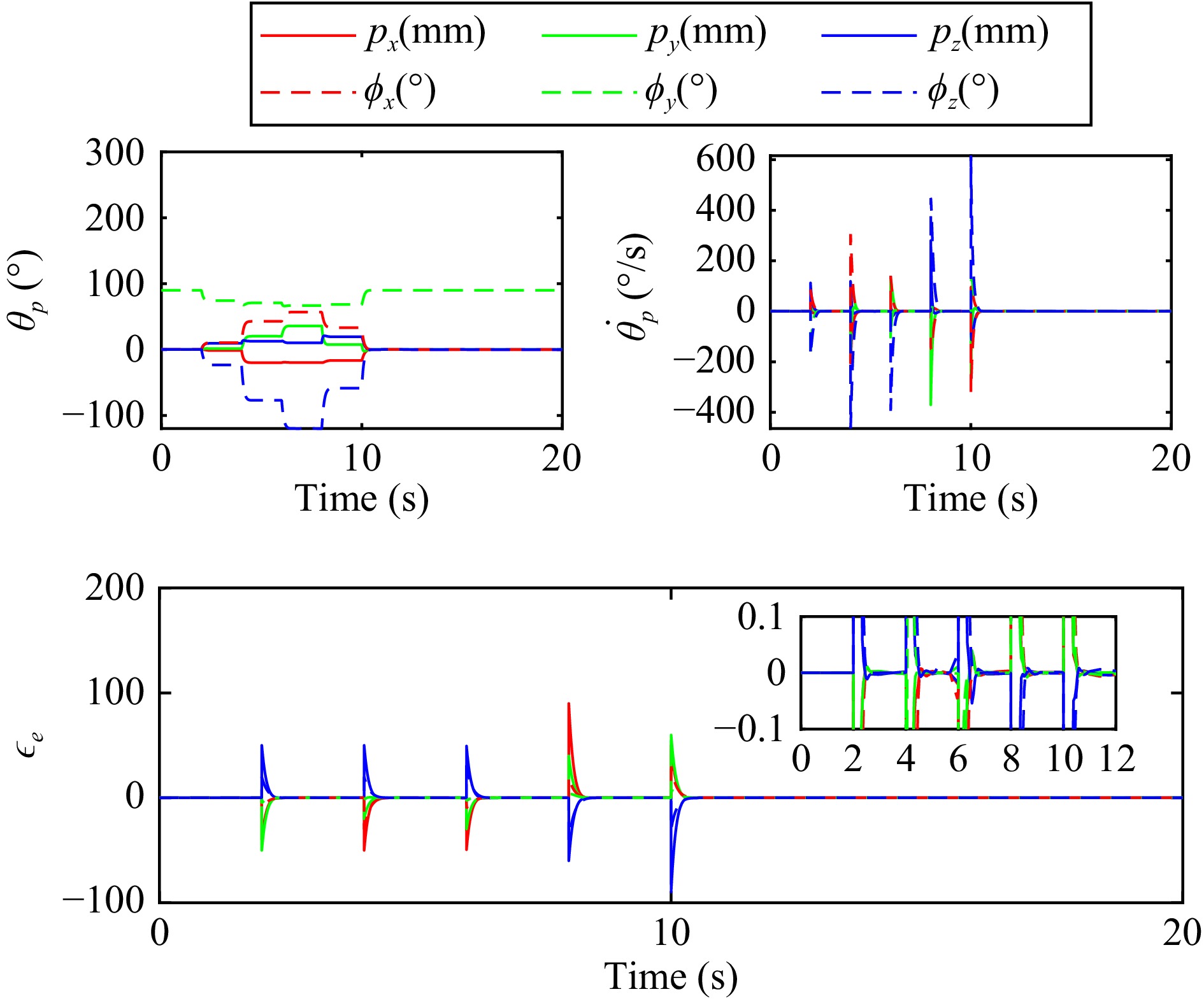
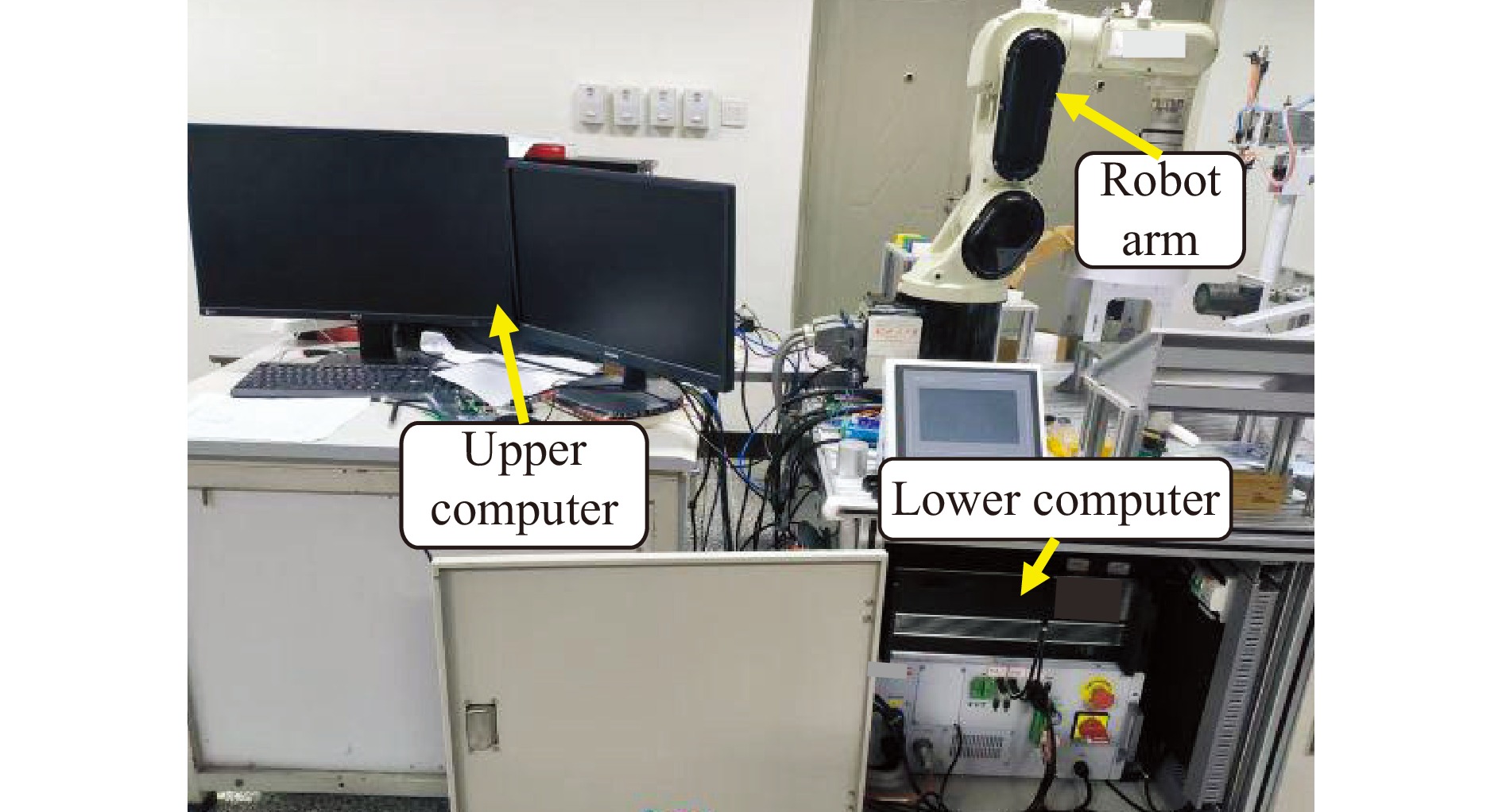
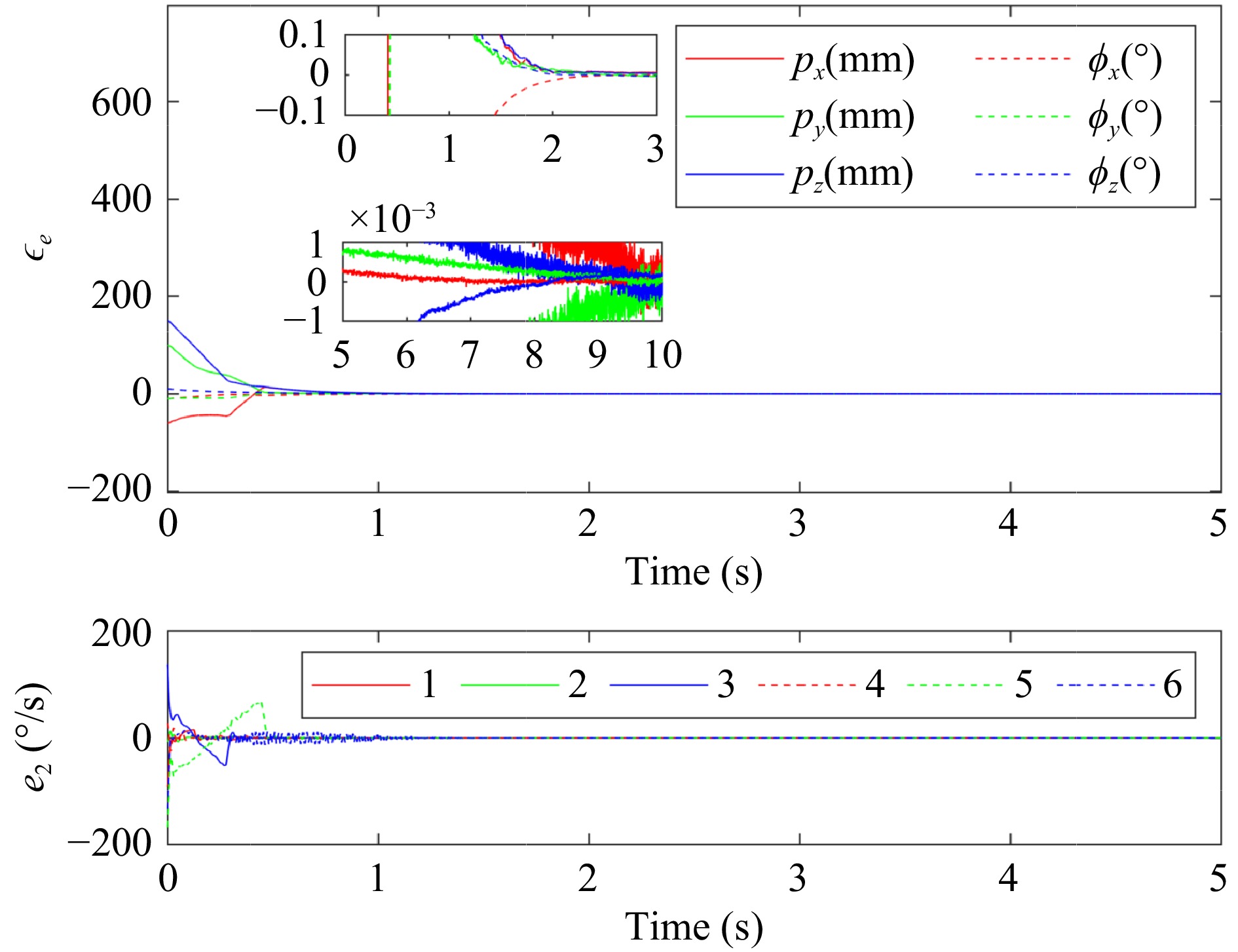
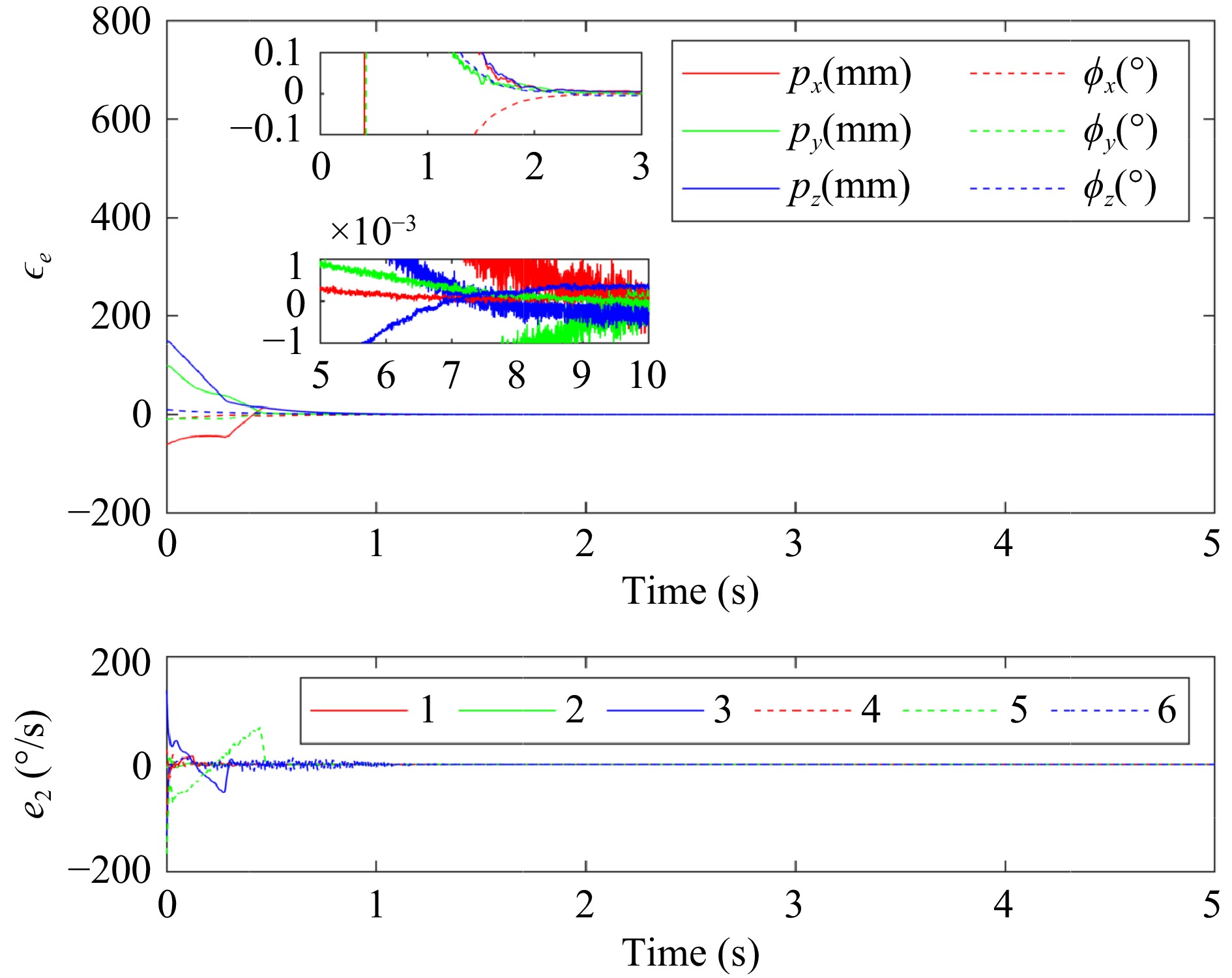
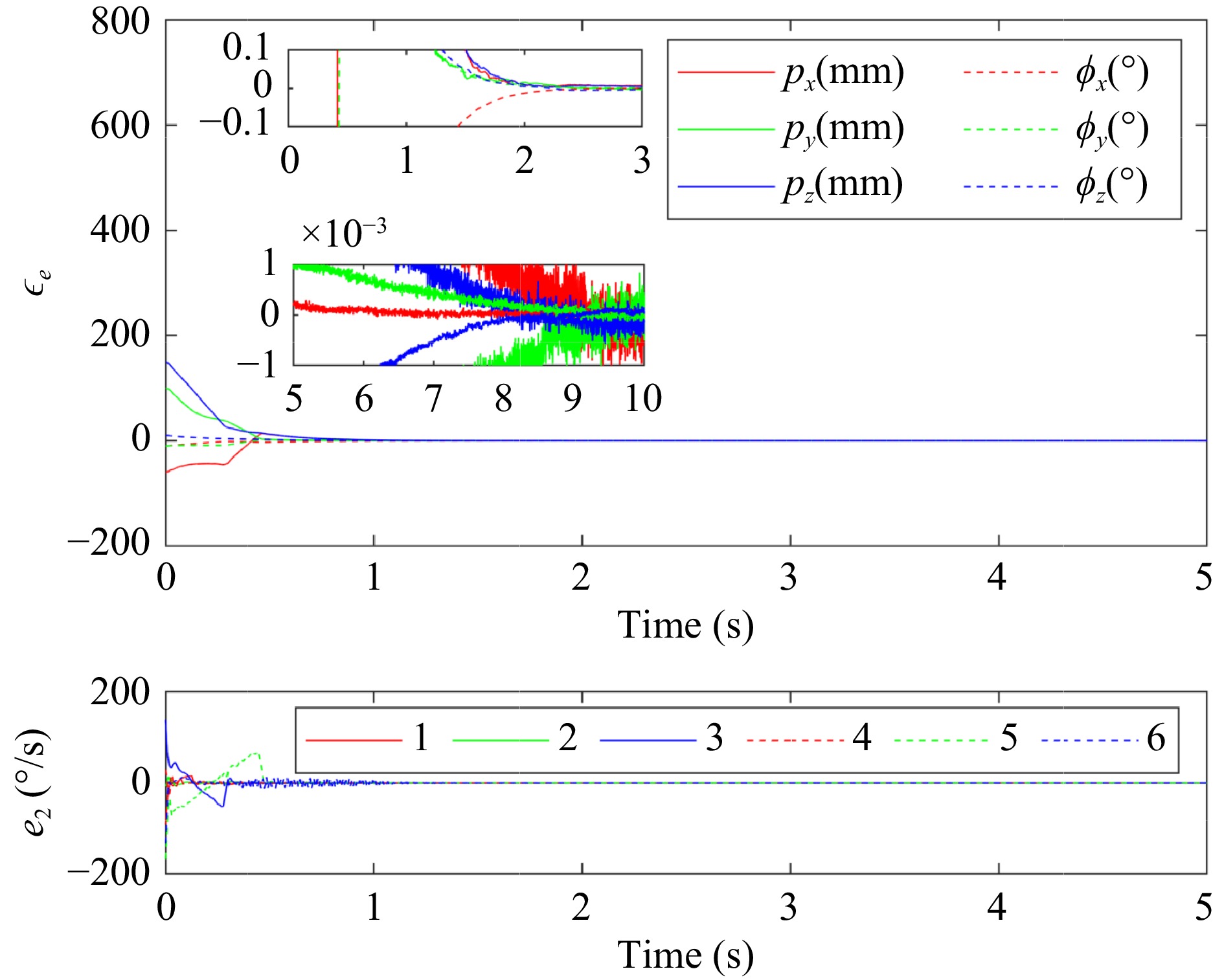
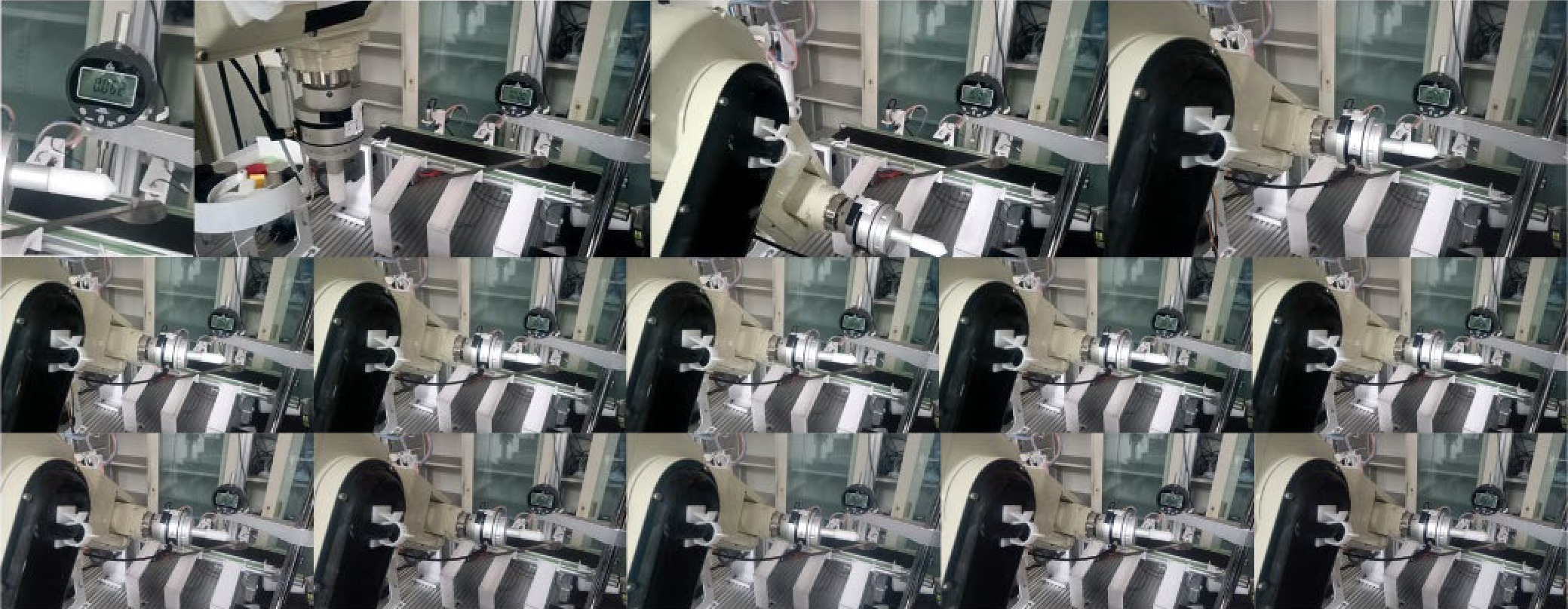
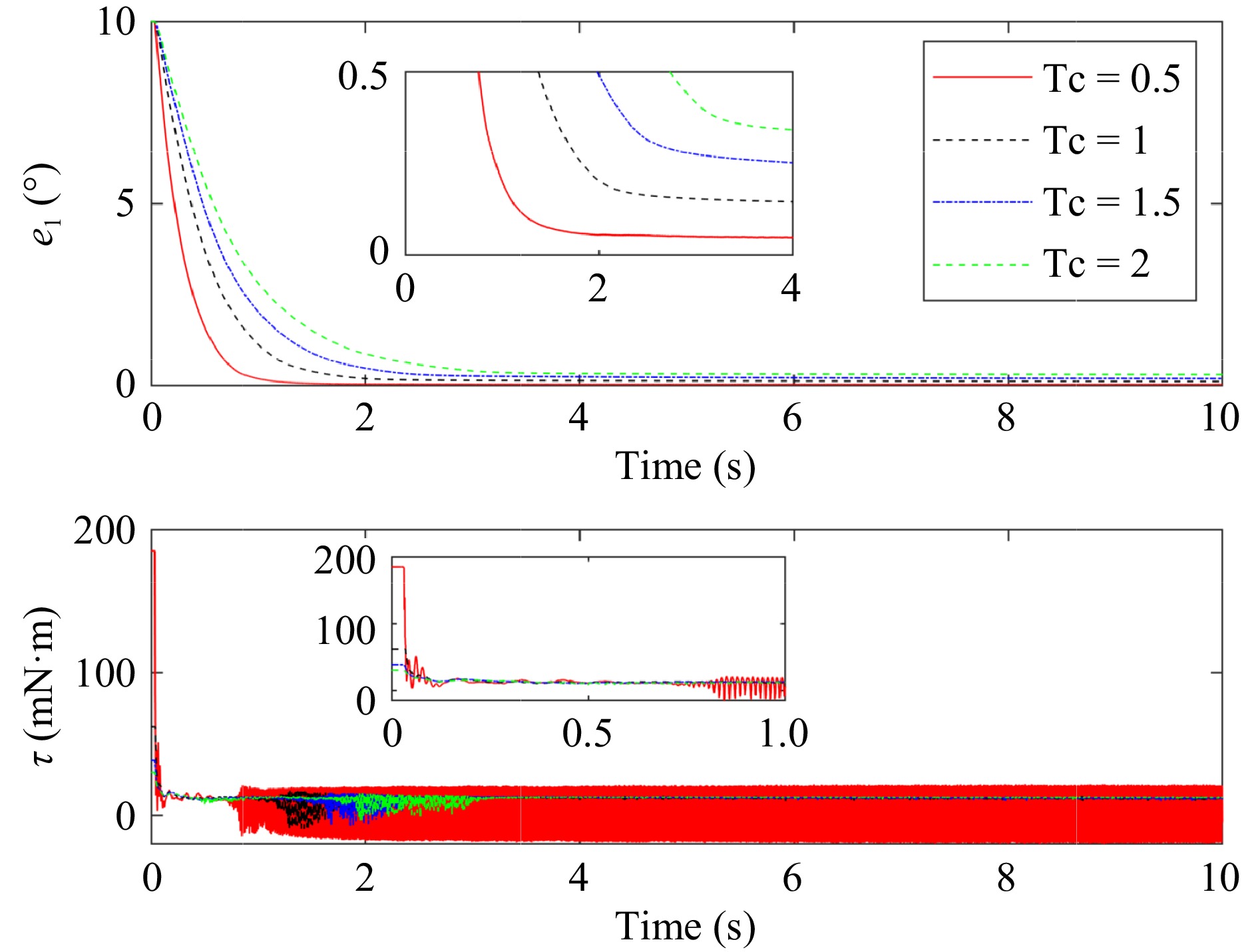
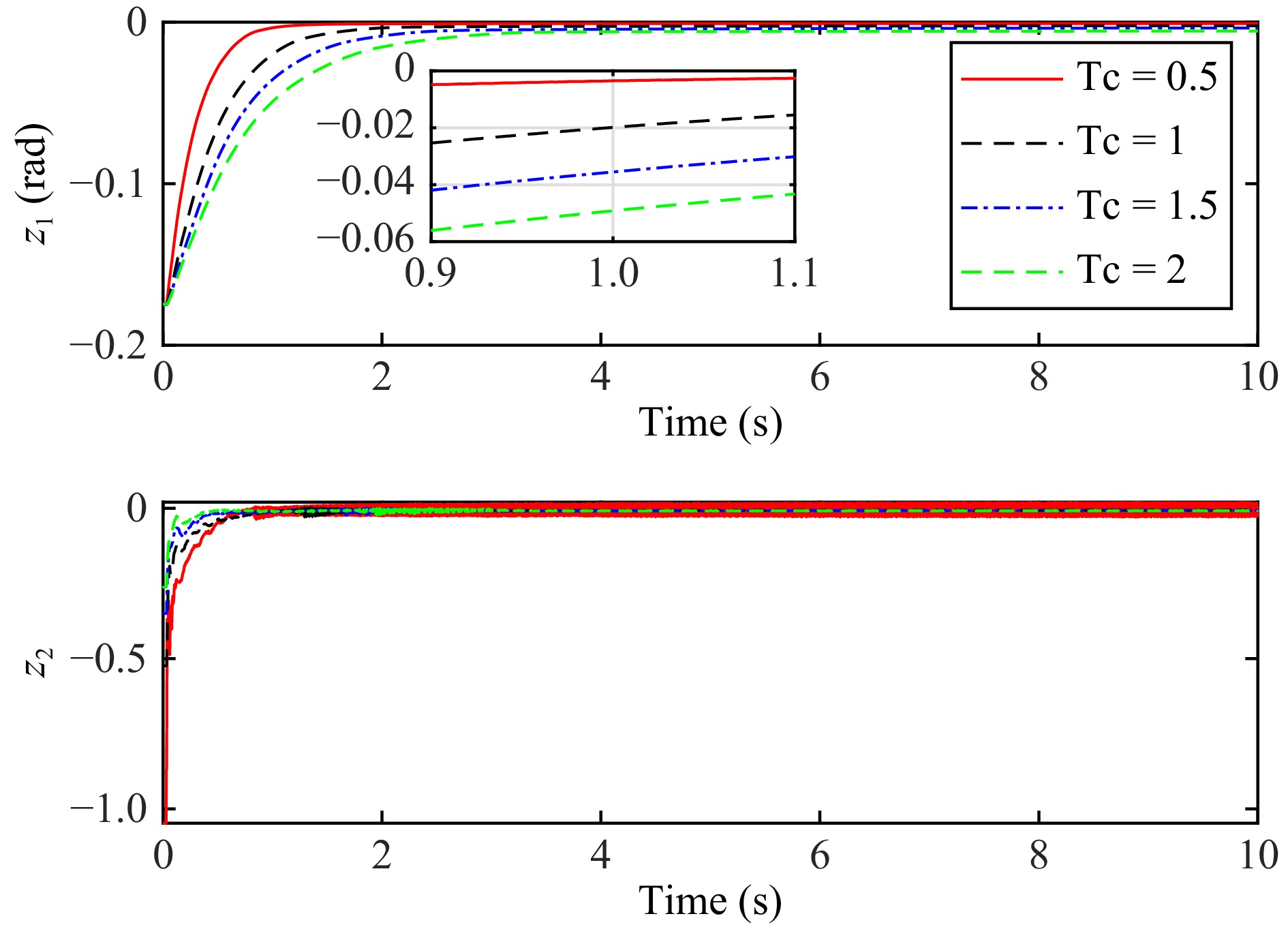
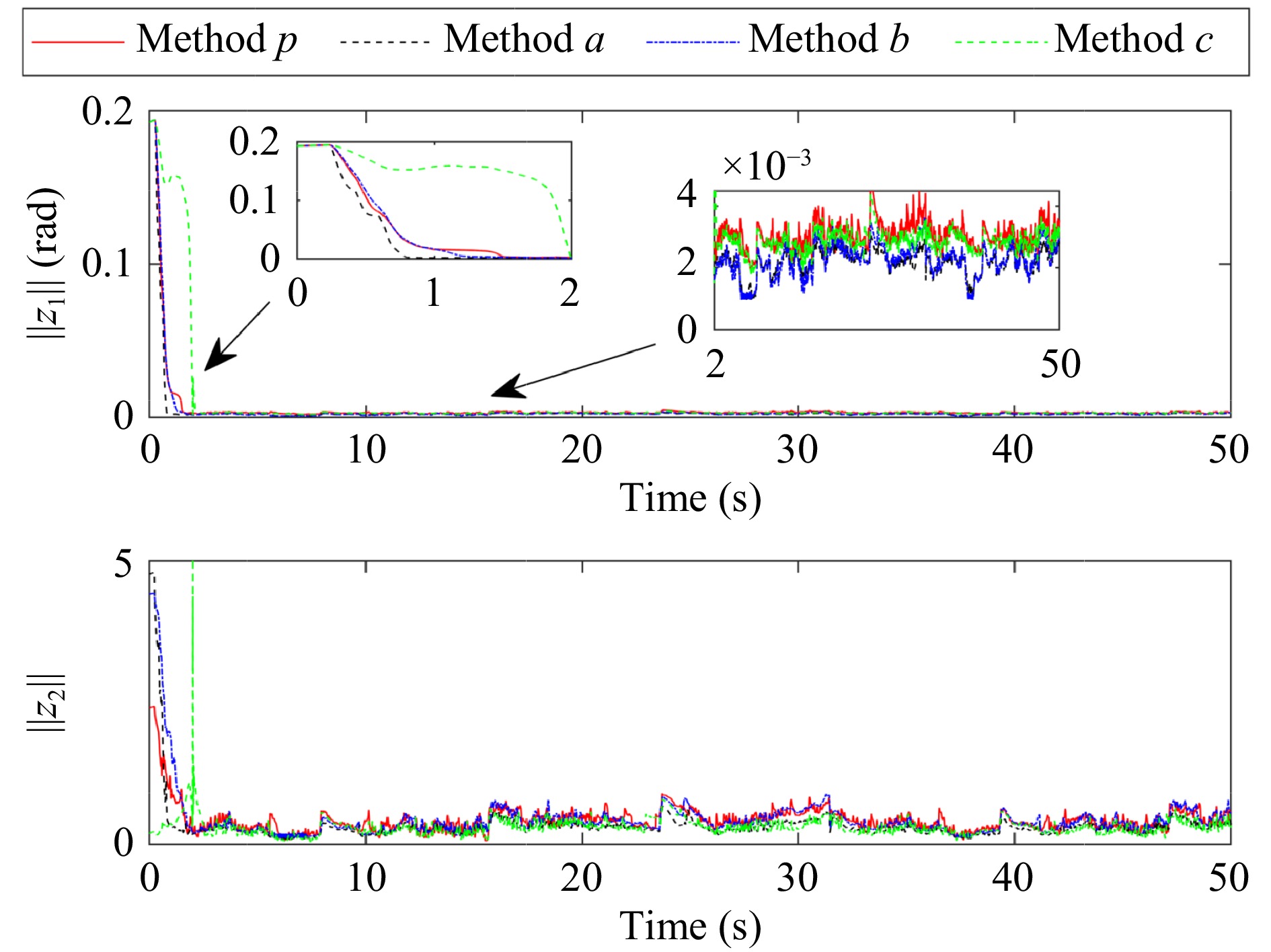
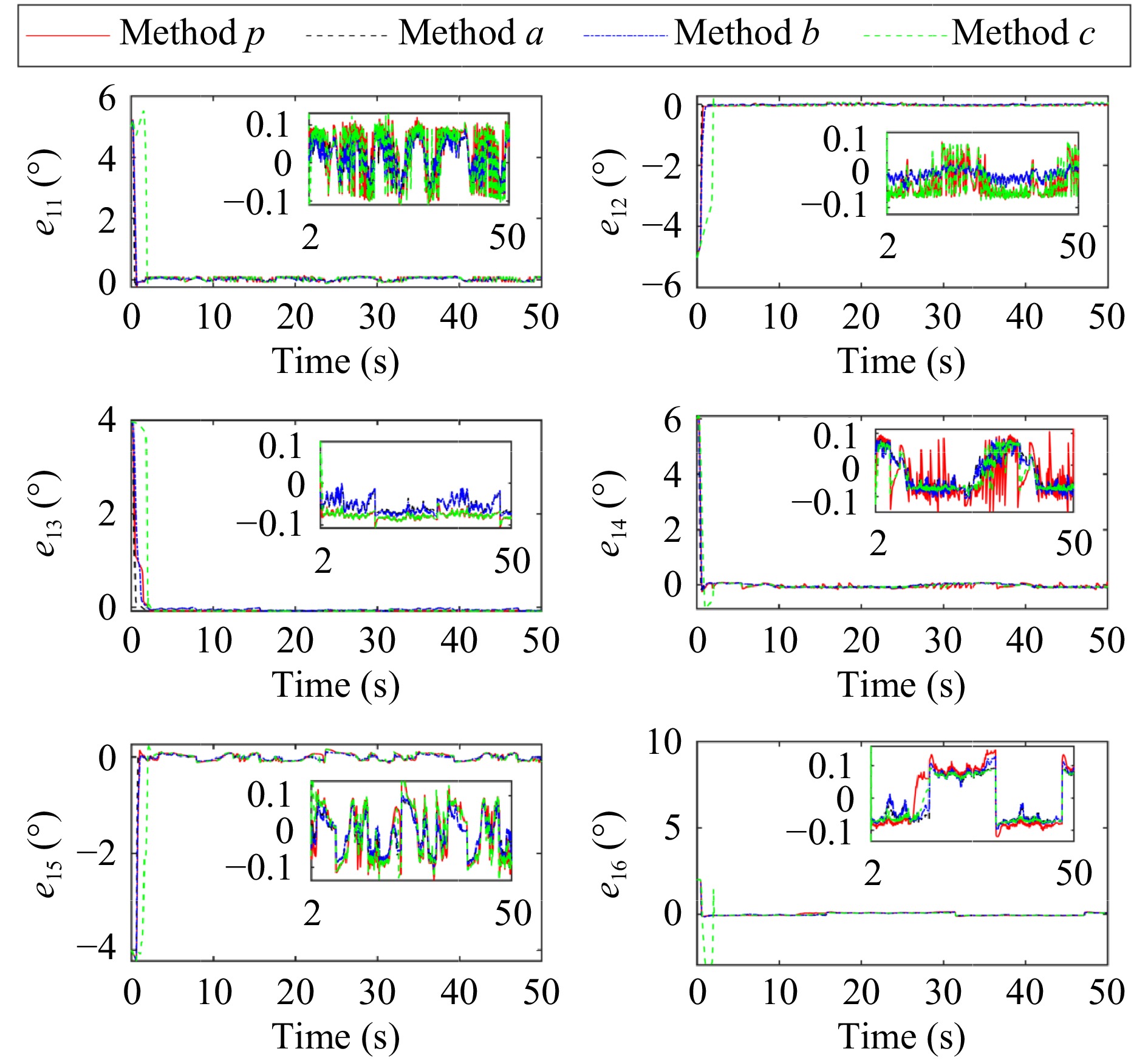
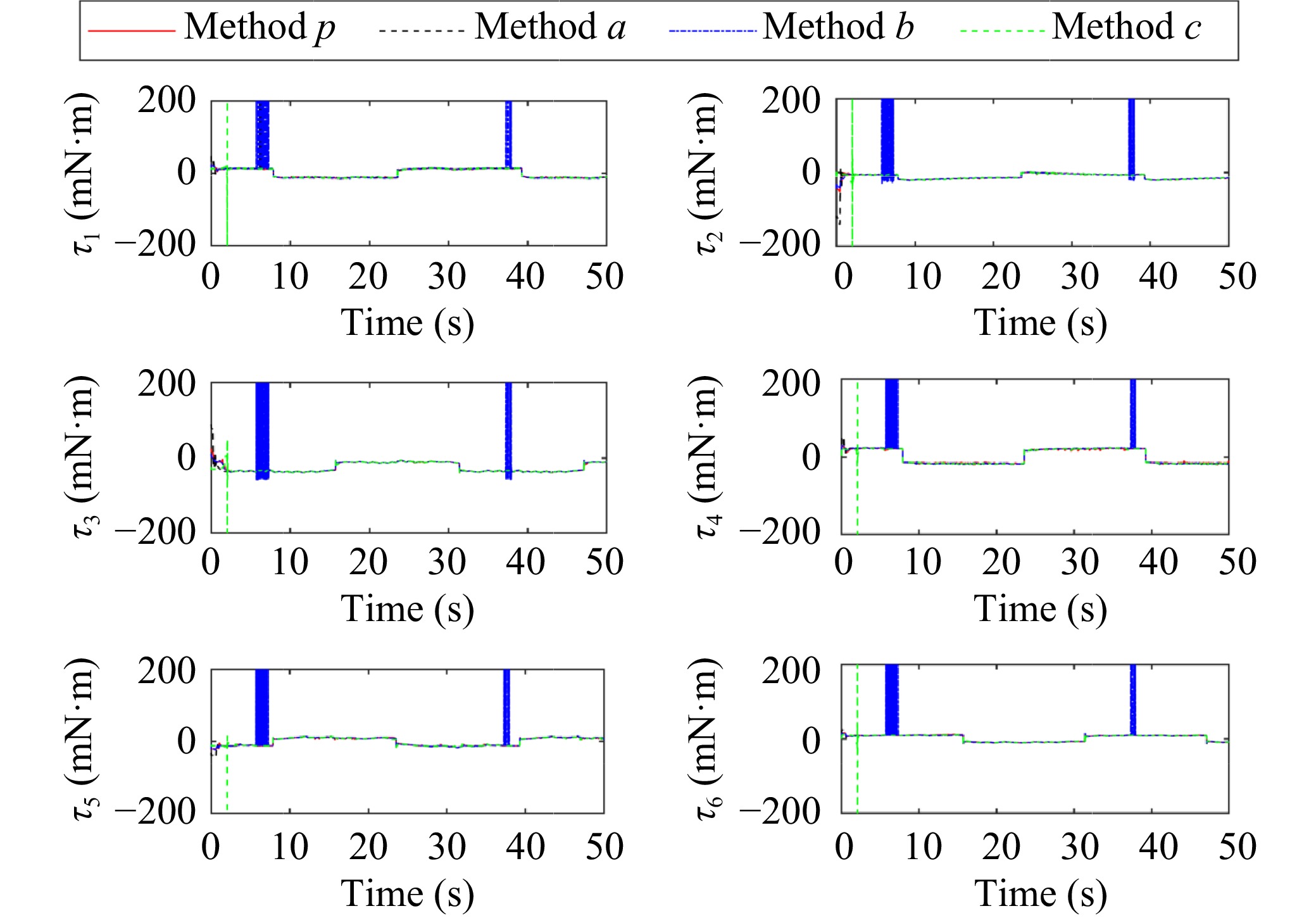
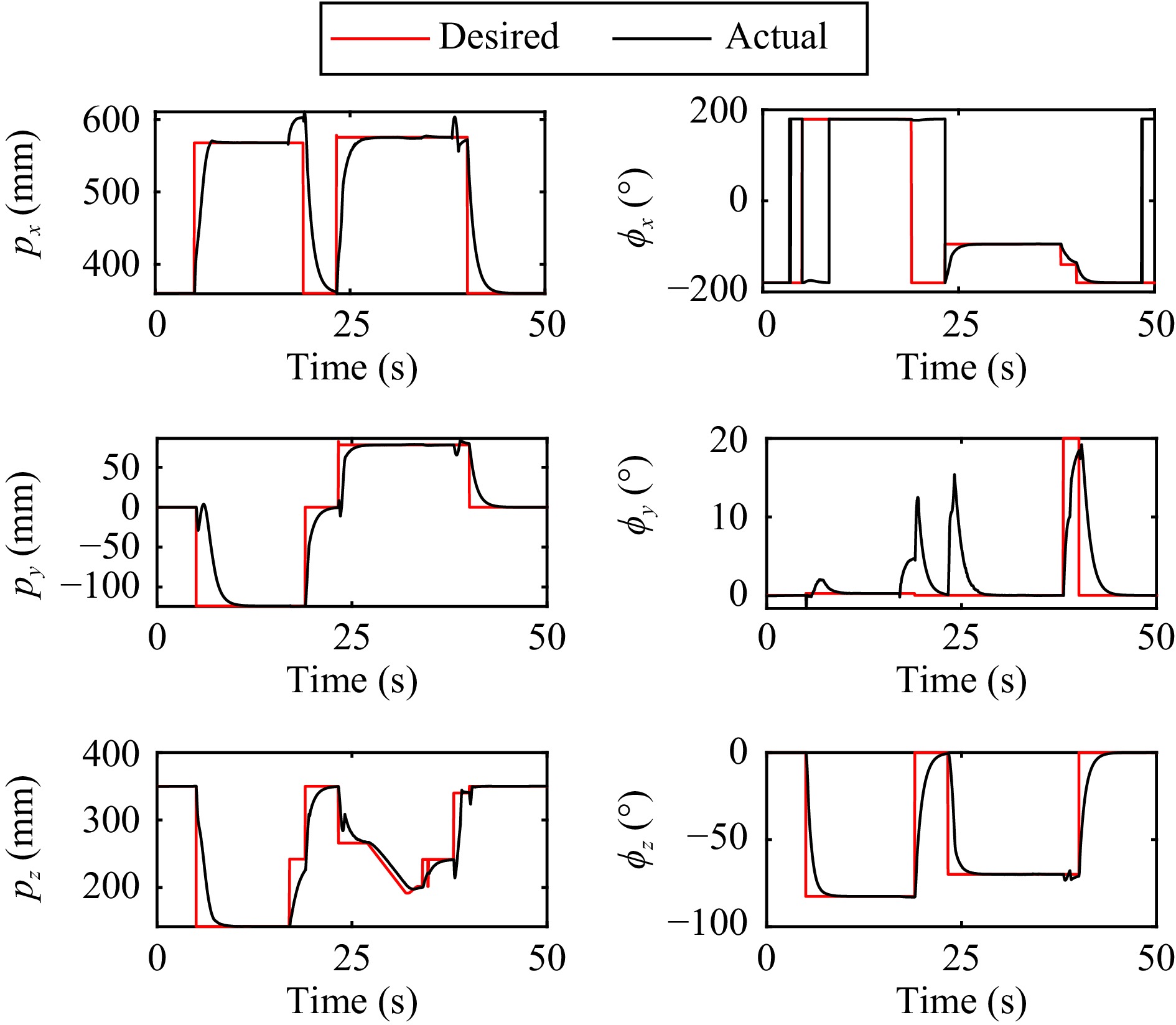
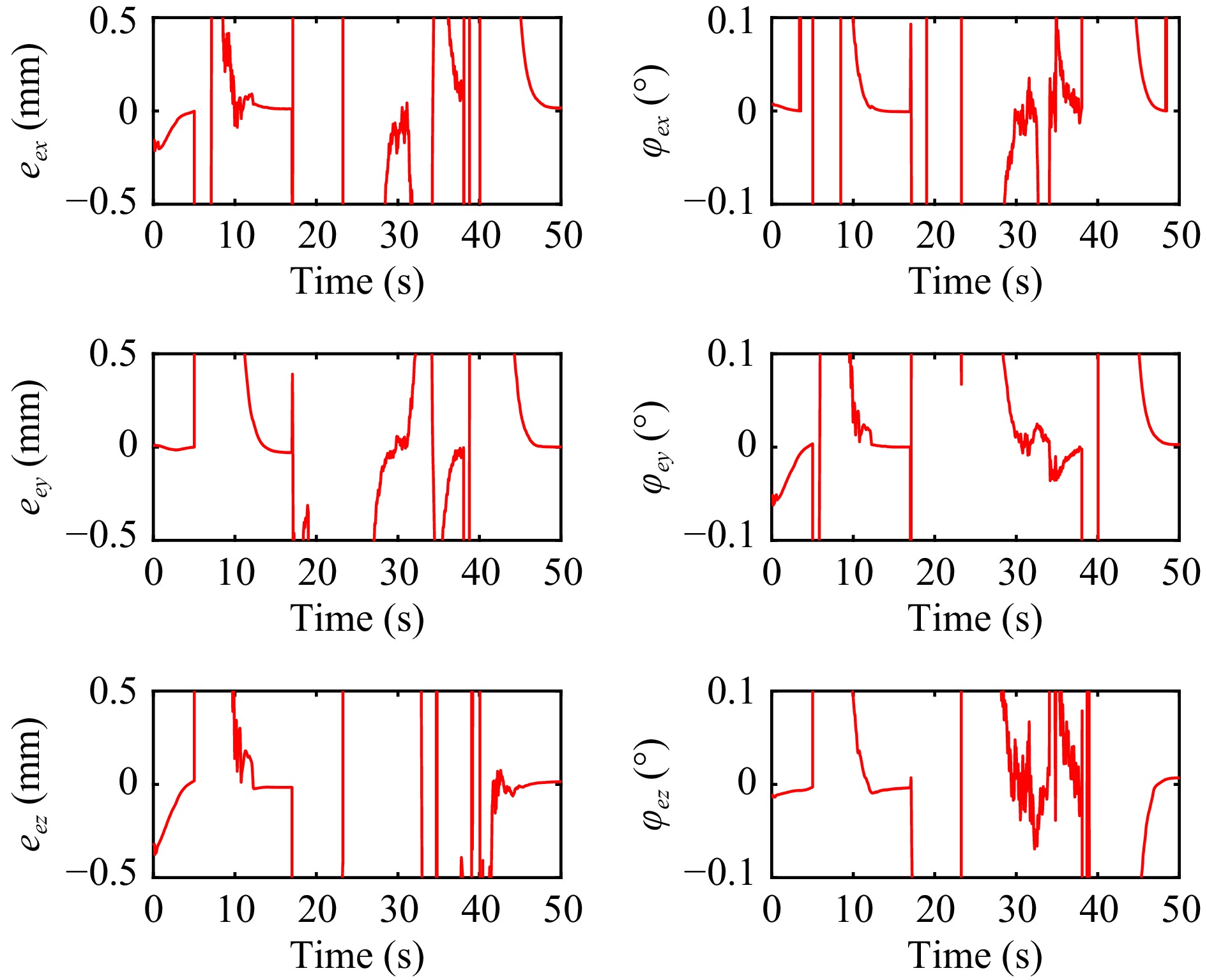
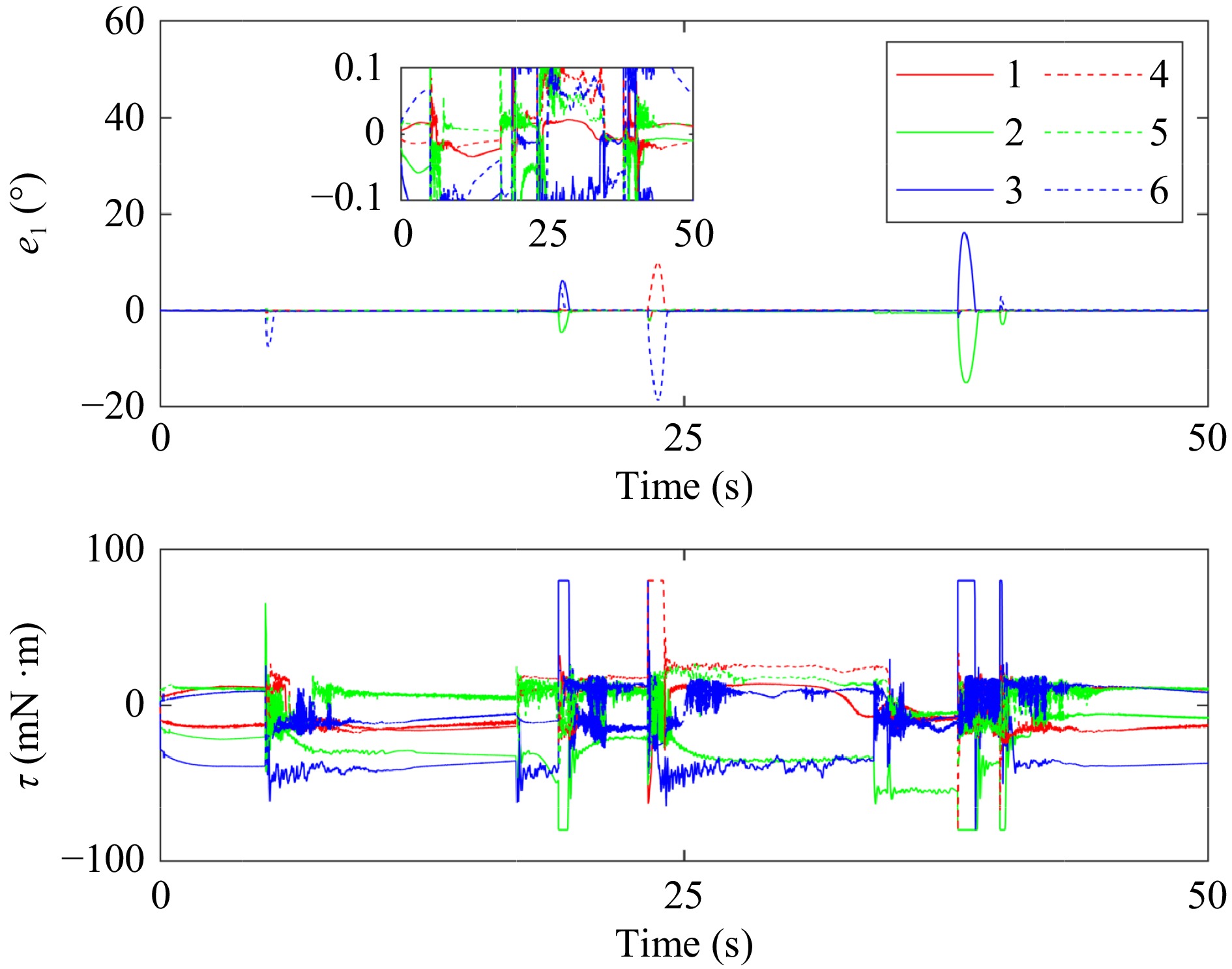
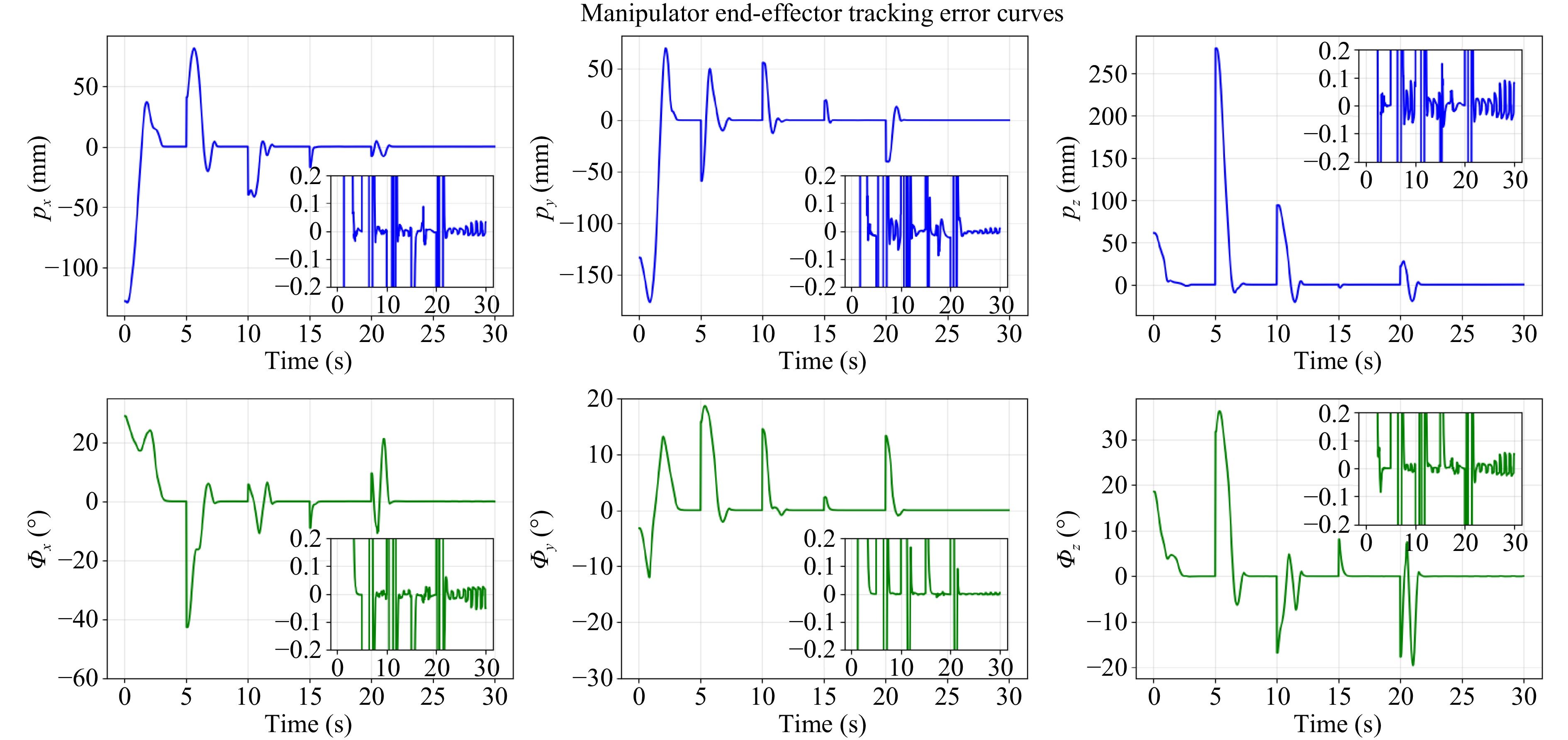
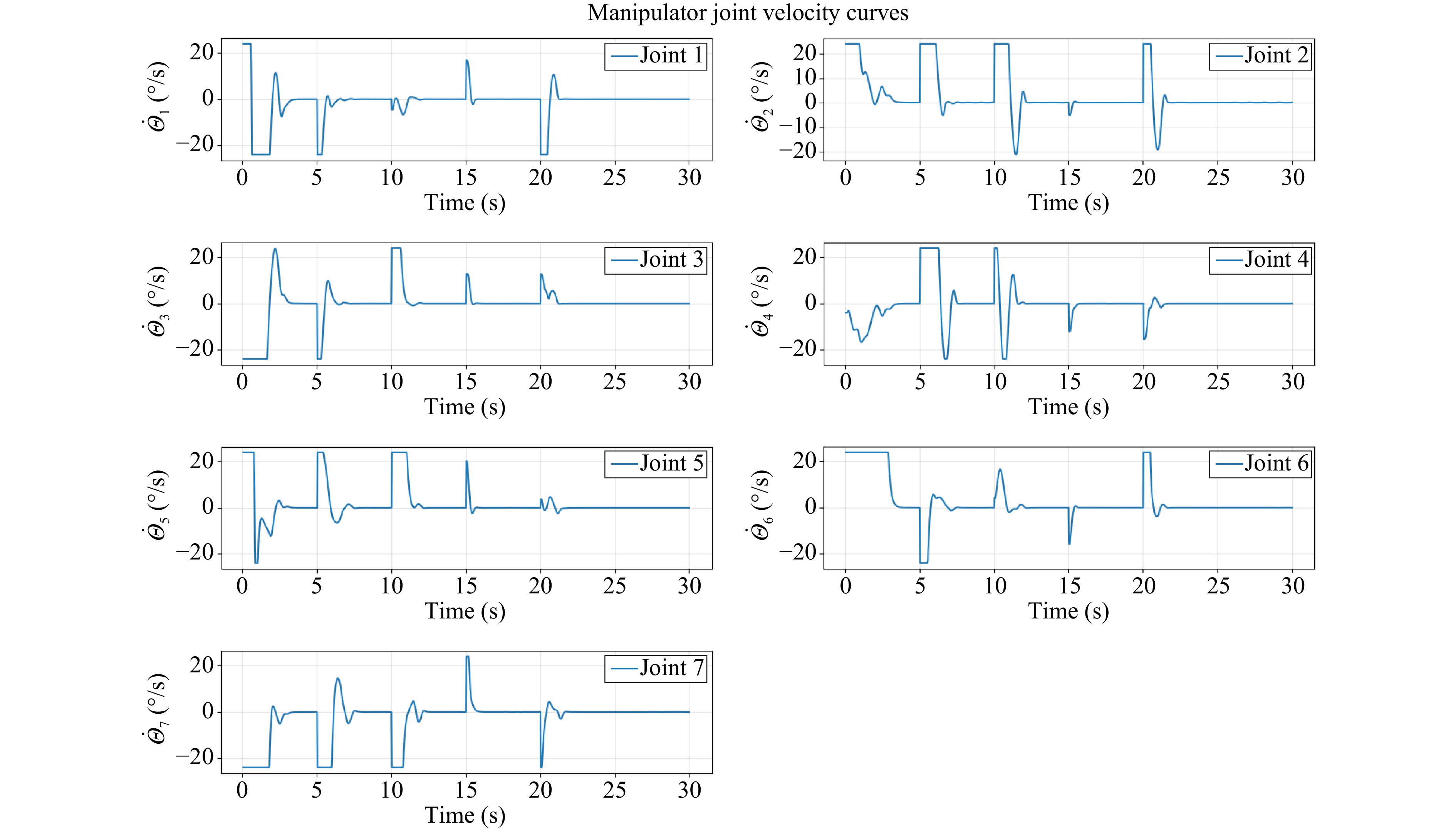
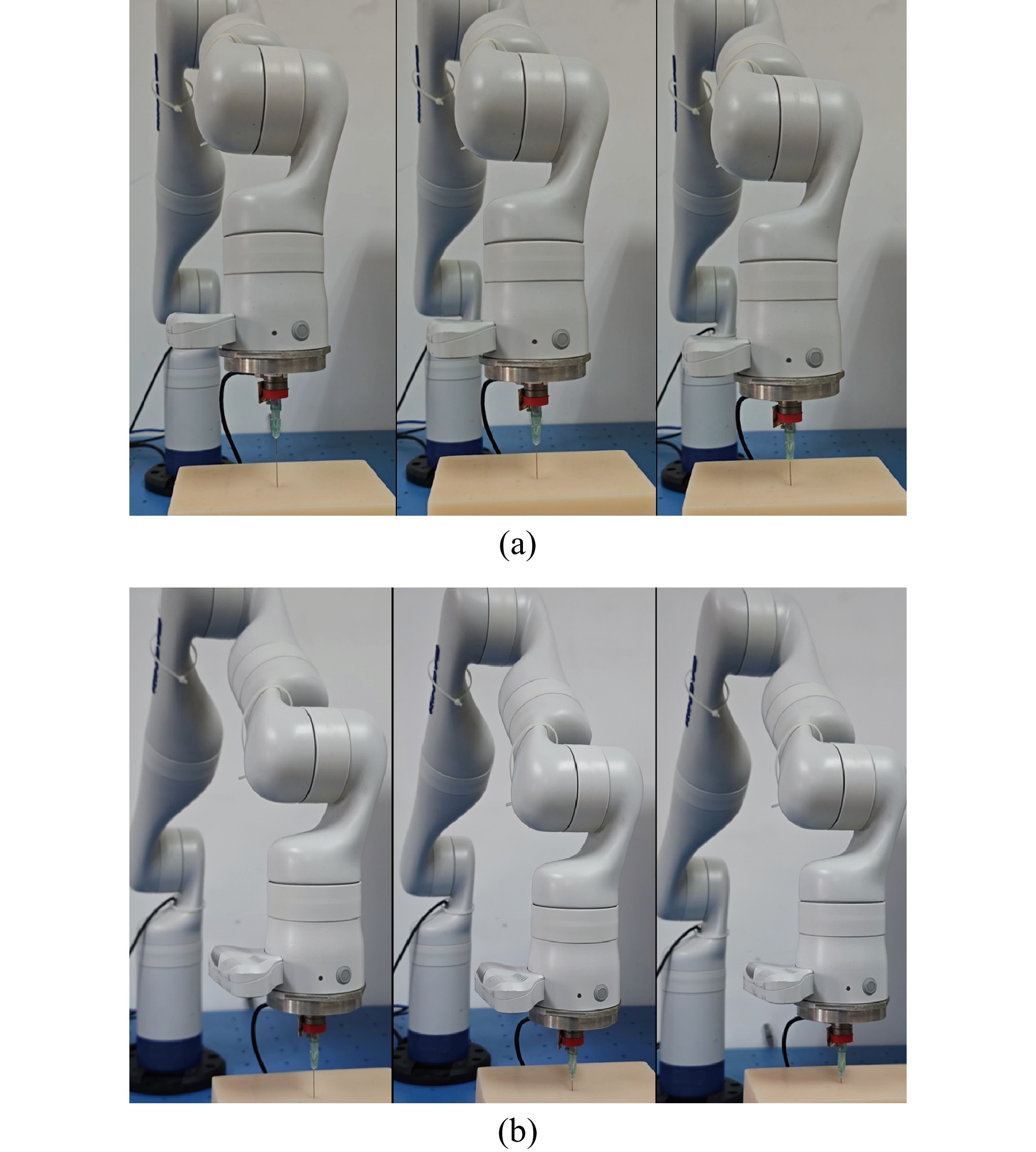
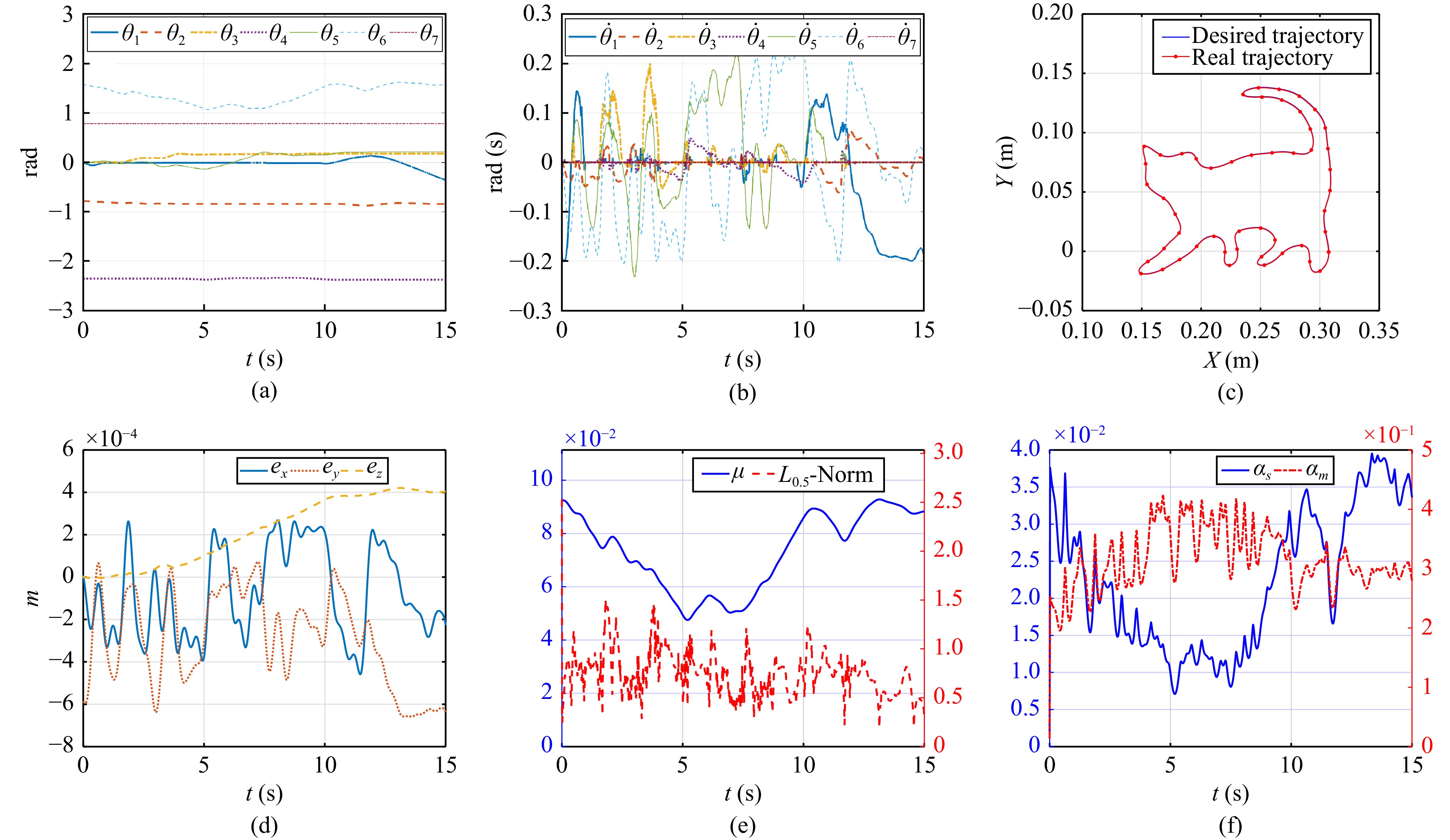
The Lyapunov synthesis method is a common controller design strategy in robotic arm motion control. However, it is difficult for this method to achieve fixed-time control without a nonlinear feedback design, whose nonlinearity may cause chattering in the robotic motion. To address this problem, a novel explicit-time control method is proposed using proportional feedback. Not only can the proposed method be applied to the Cartesian space control of the robotic arm system, but it can also be used for the joint-space tracking control. More specifically, under bounded initial condition, the origin of system is attracted to a predefined neighborhood of zero within an explicit fixed-time boundary. Based on that, a robust fixed-time tracking controller of robot is designed by using this linear time-invariant feedback. Besides, compared with other related methods, the proposed method has smoother and lower control input under the same initial condition. In particular, this method enables the robotic arm to achieve a tracking accuracy of 0.1 millimeters and 0.1 degrees within as short as 1.5 seconds, while the repeat positioning accuracy approaches the hardware limit, reaching 0.001 millimeters (±0.03 millimeters) and 0.001 degrees (±0.05 degrees). Theoretical analysis, simulation and experiment verify the main results. Code, data and video are also available, the corresponding links are printed in the relevant places.
W. Yan, T. Zhao, B. Niu, Z. Shi, and E. Q. Wu, “Cartesian space control and joint tracking control for a robotic arm system with explicit-time proportional convergence,” IEEE/CAA J. Autom. Sinica, early access, 2026. doi: 10.1109/JAS.2026.125963.





































































 E-mail Alert
E-mail Alert


