2025,
12(5):
841-858.
doi: 10.1109/JAS.2025.125495
Abstract:
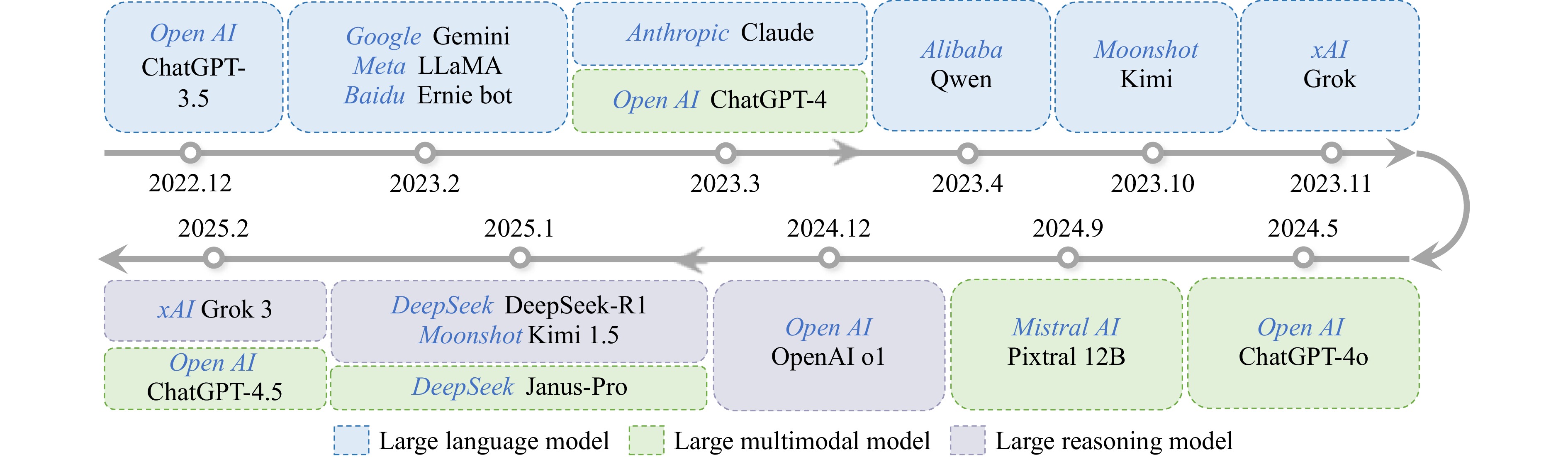
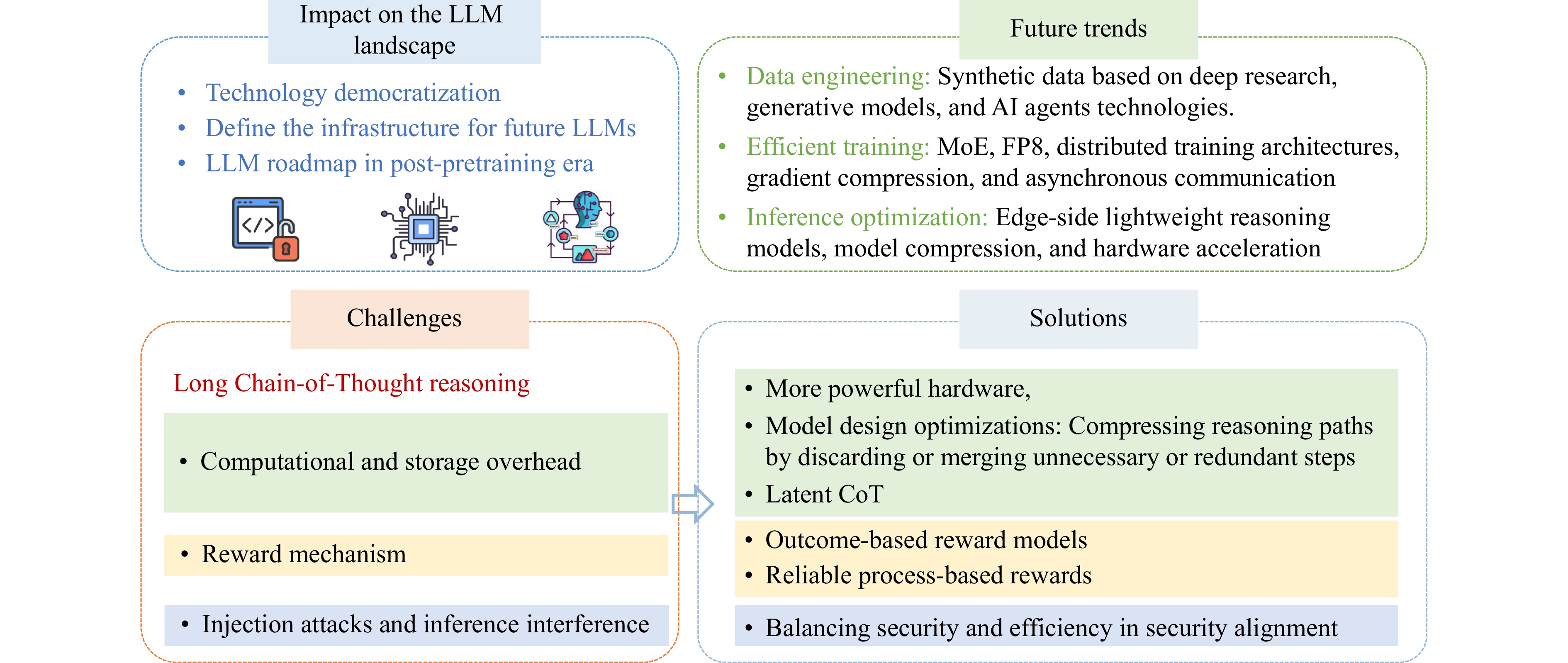
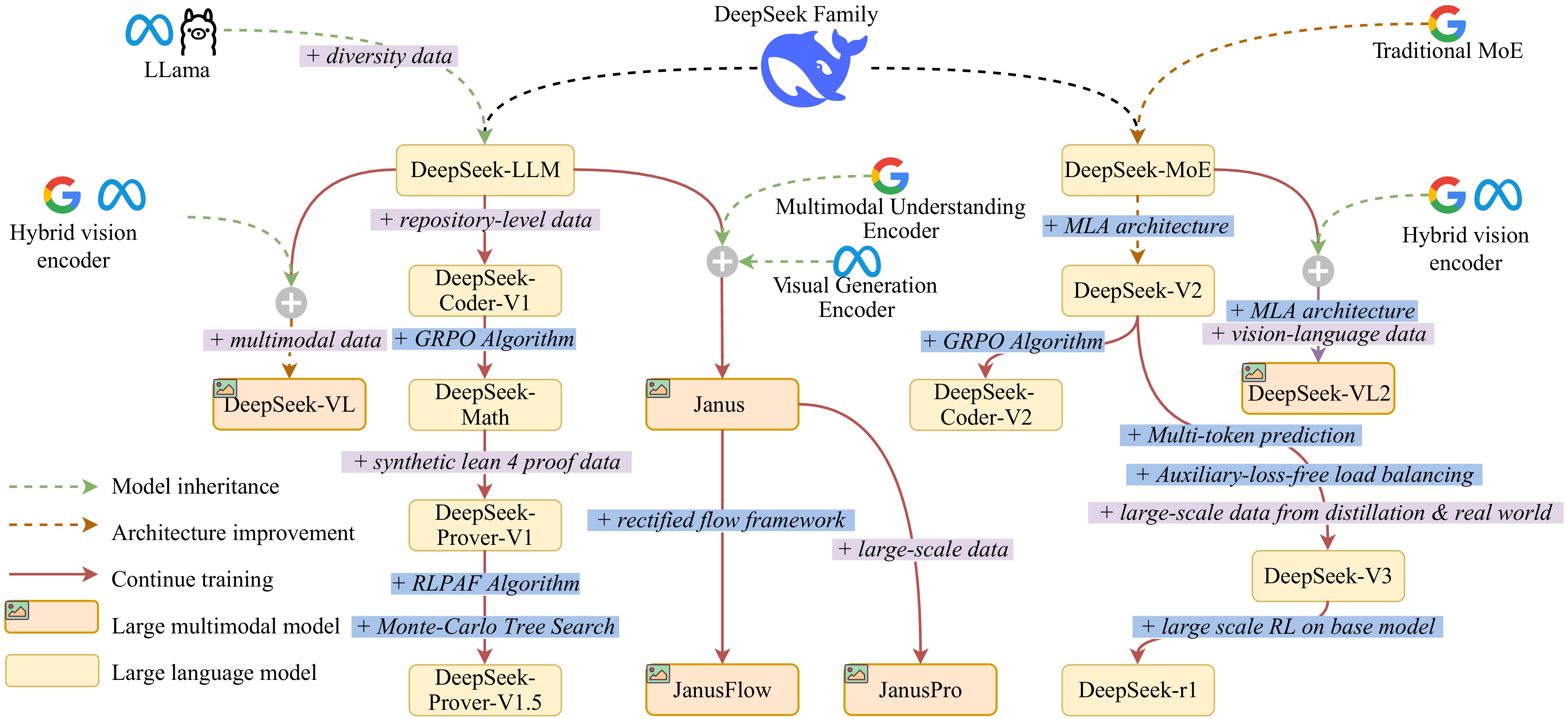
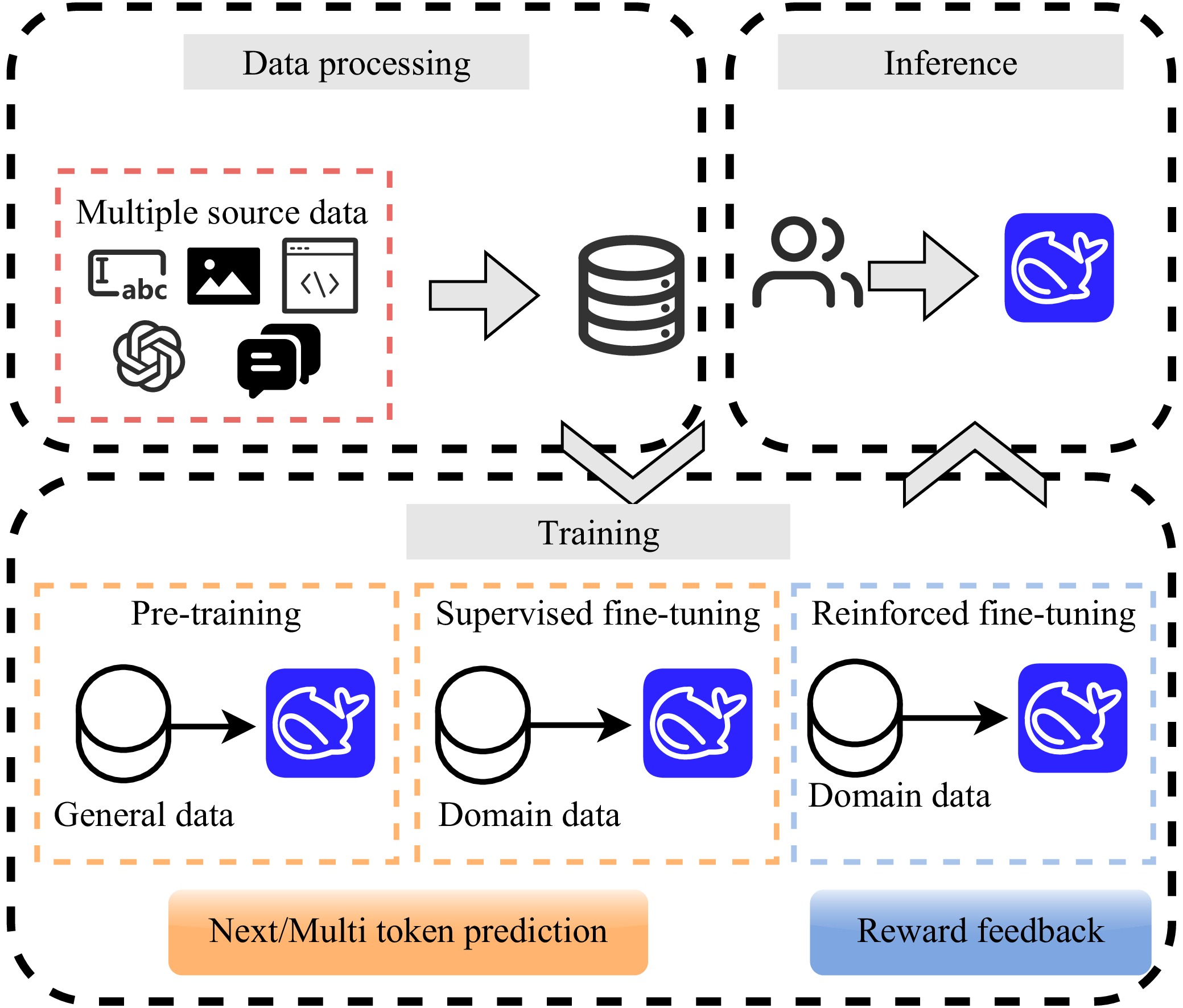
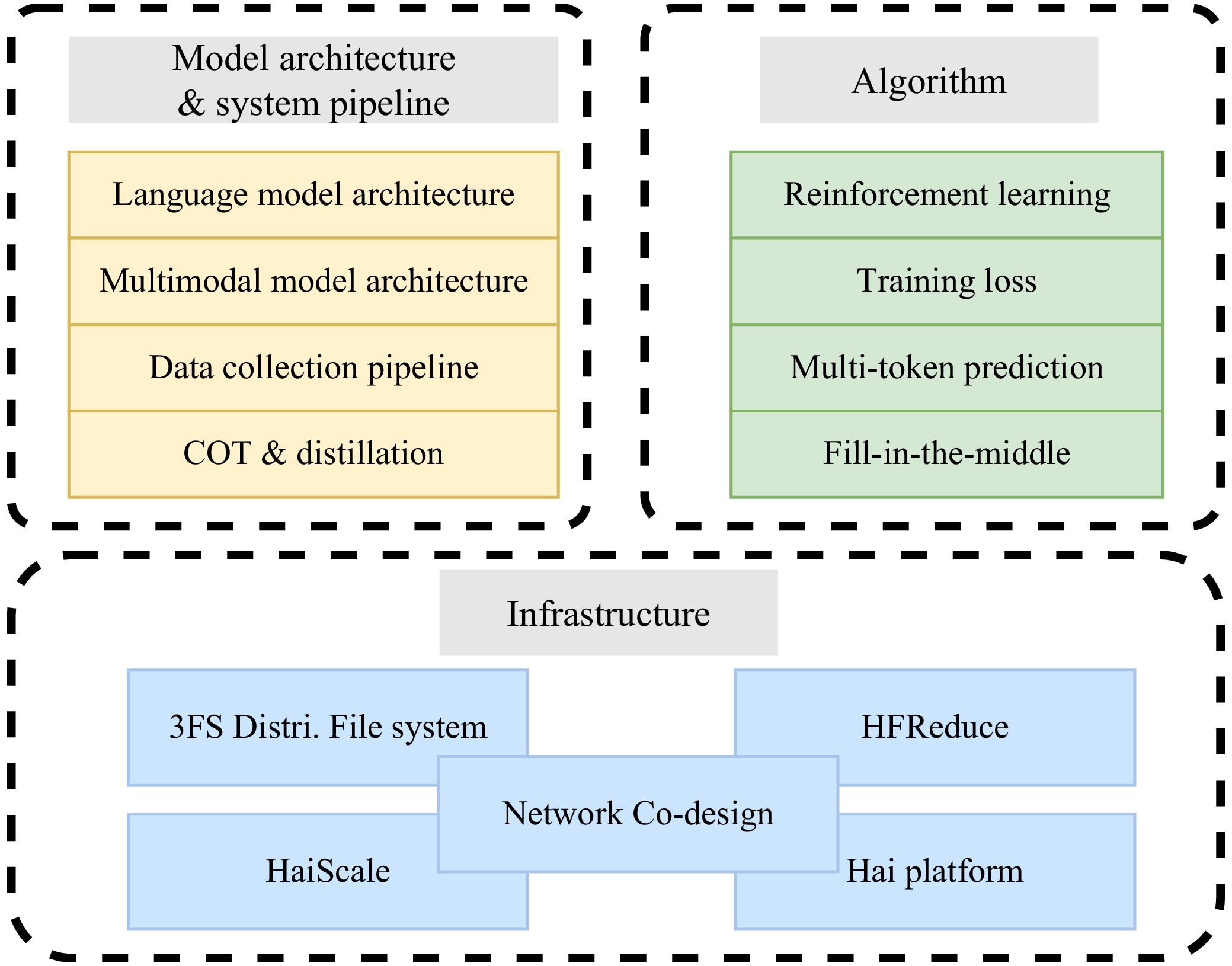
DeepSeek, a Chinese artificial intelligence (AI) startup, has released their V3 and R1 series models, which attracted global attention due to their low cost, high performance, and open-source advantages. This paper begins by reviewing the evolution of large AI models focusing on paradigm shifts, the...
L. Xiong, H. Wang, X. Chen, L. Sheng, Y. Xiong, J. Liu, Y. Xiao, H. Chen, Q.-L. Han, and Y. Tang, “DeepSeek: Paradigm shifts and technical evolution in large AI models,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 5, pp. 841–858, May 2025. doi: 10.1109/JAS.2025.125495.

























 E-mail Alert
E-mail Alert