A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | L. L. Wang, D. Q. Zhu, W. Pang, and C. M. Luo, “A novel obstacle avoidance consensus control for multi-AUV formation system,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1304–1318, May 2023. doi: 10.1109/JAS.2023.123201

|
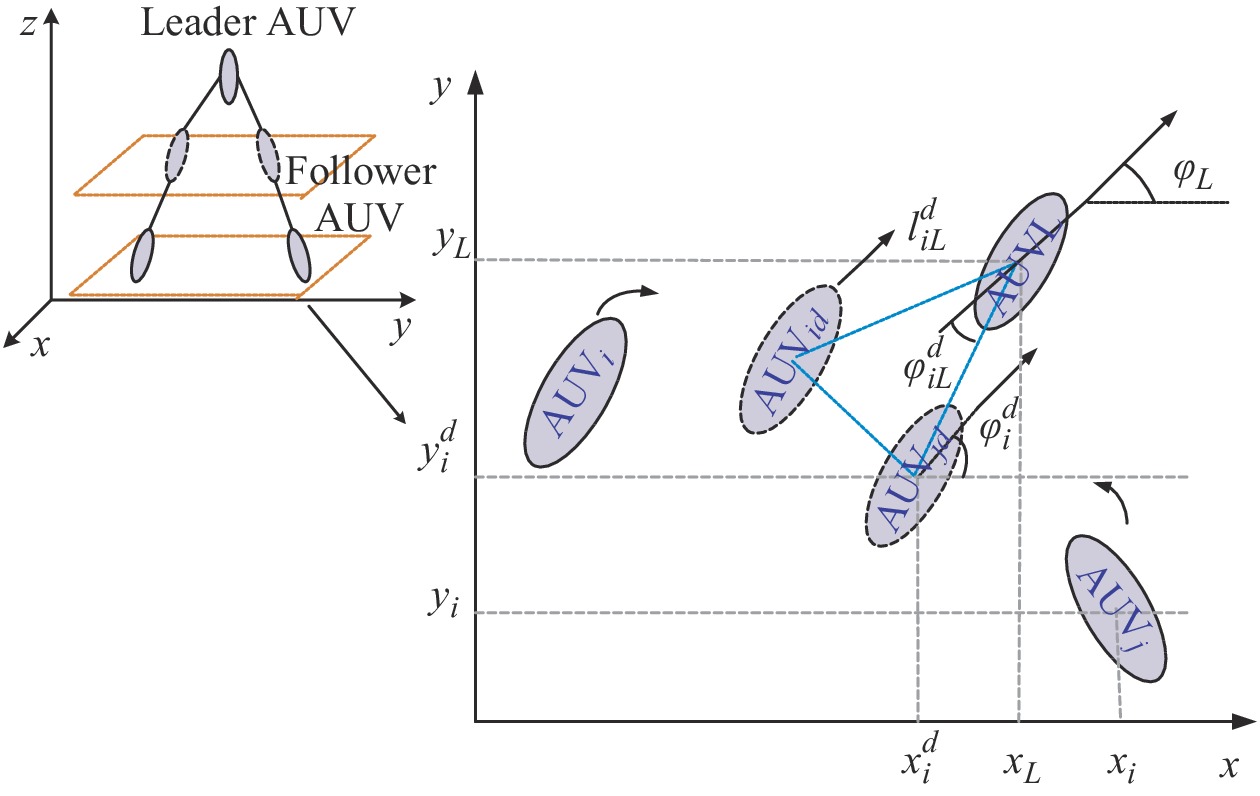
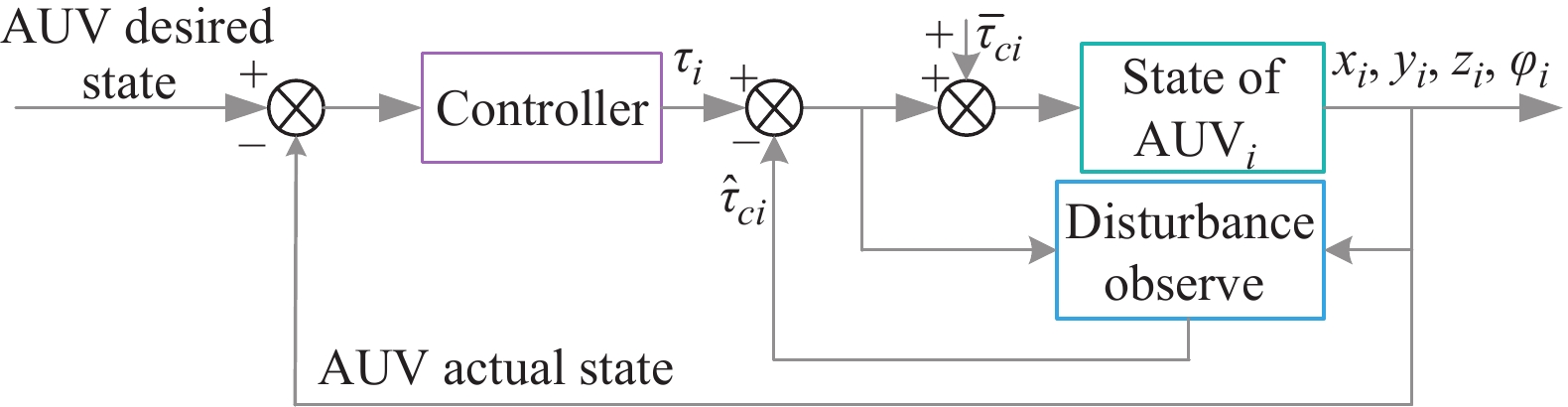
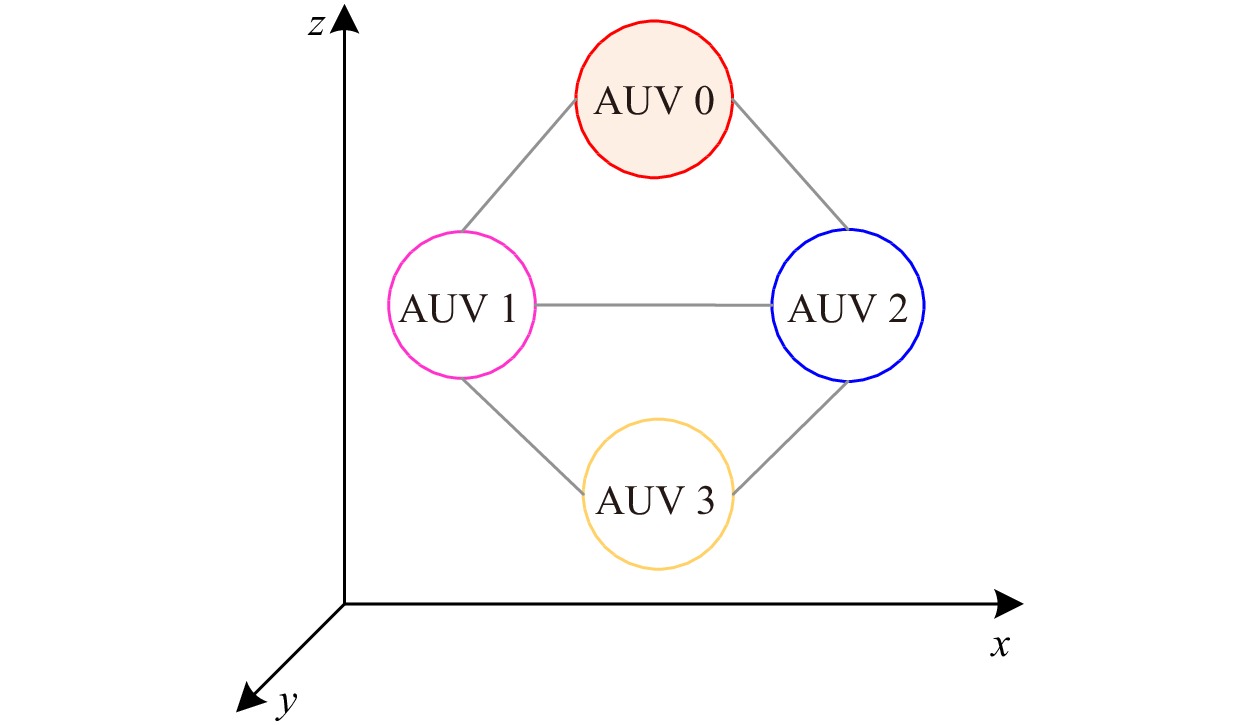
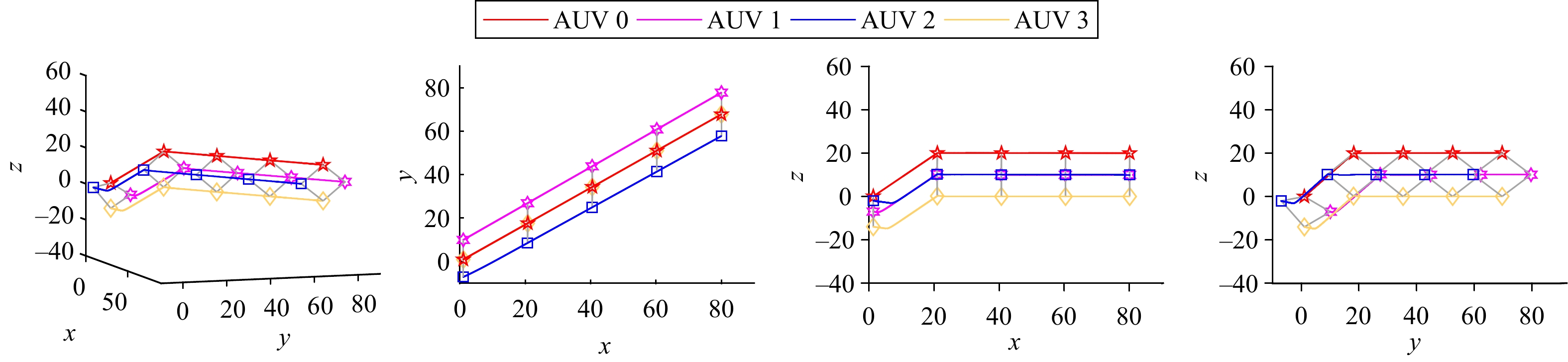
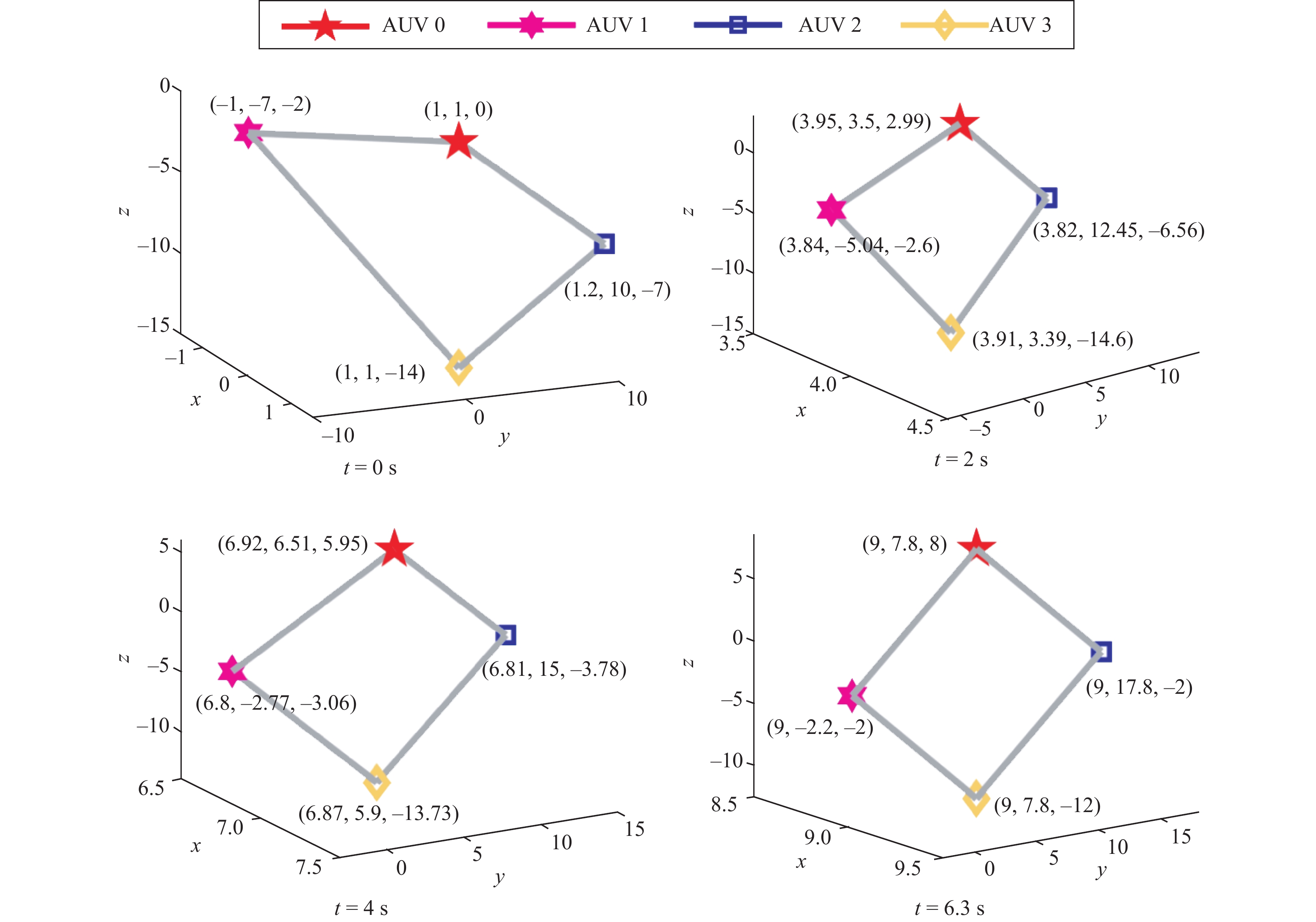
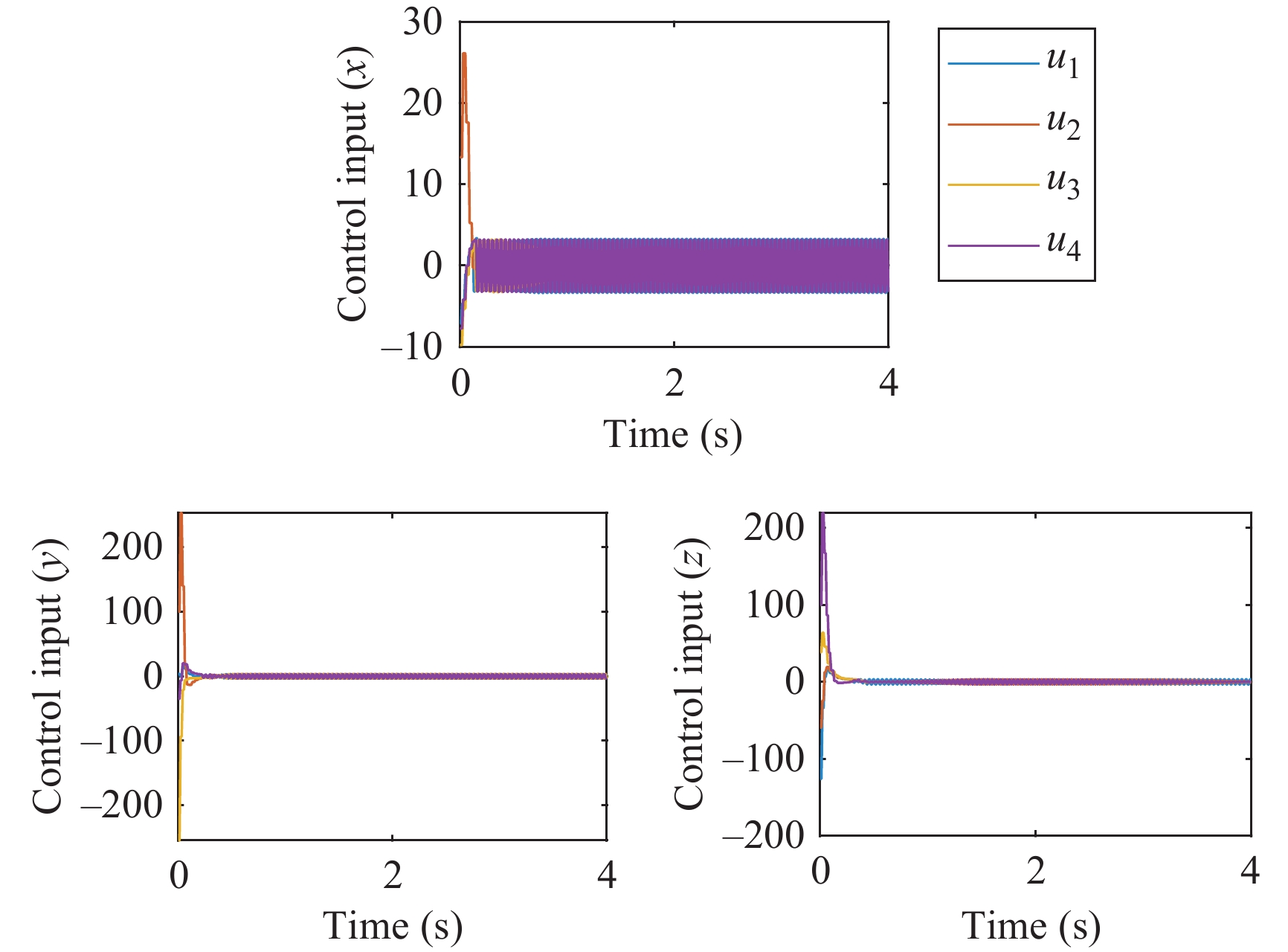
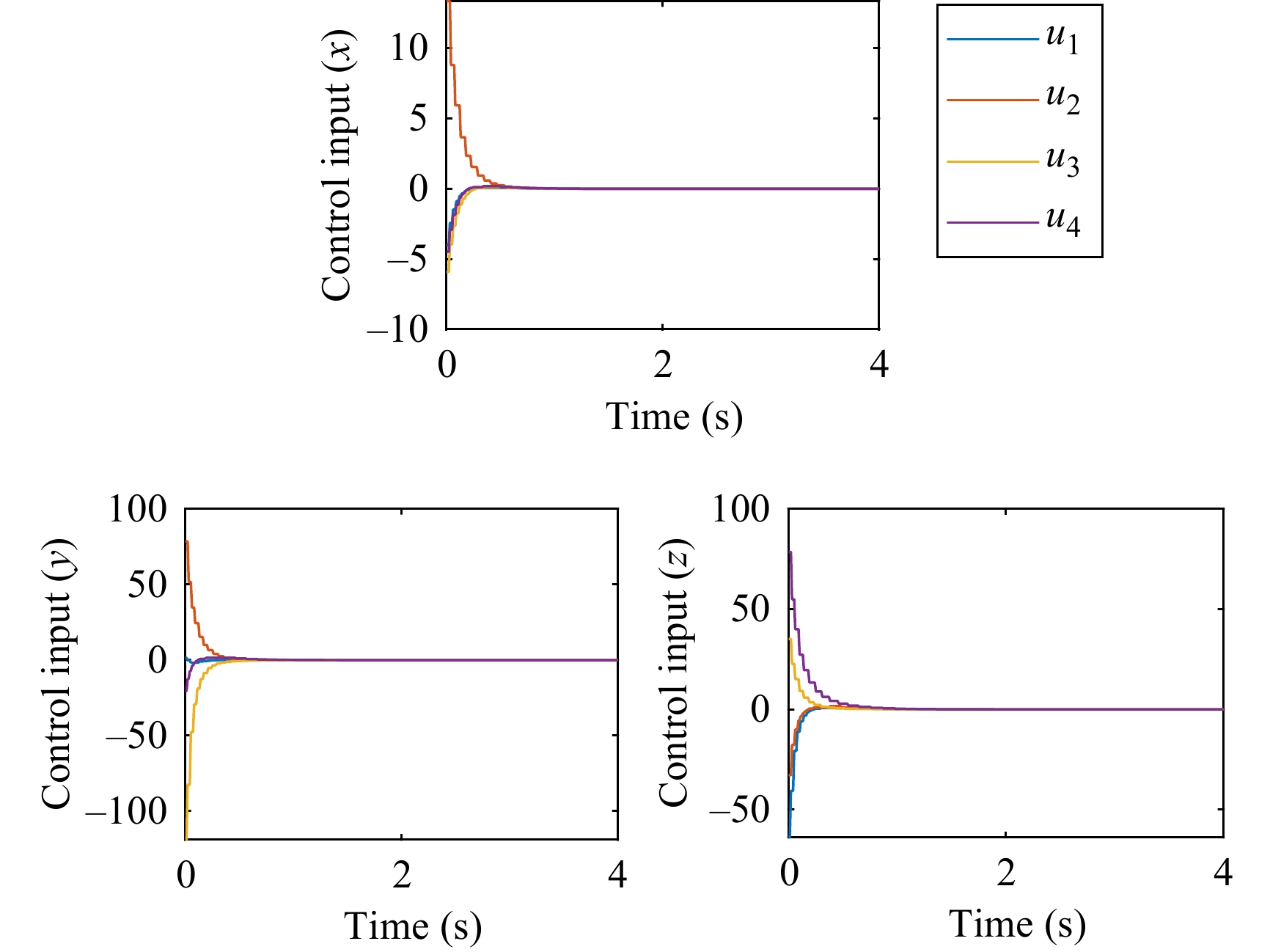
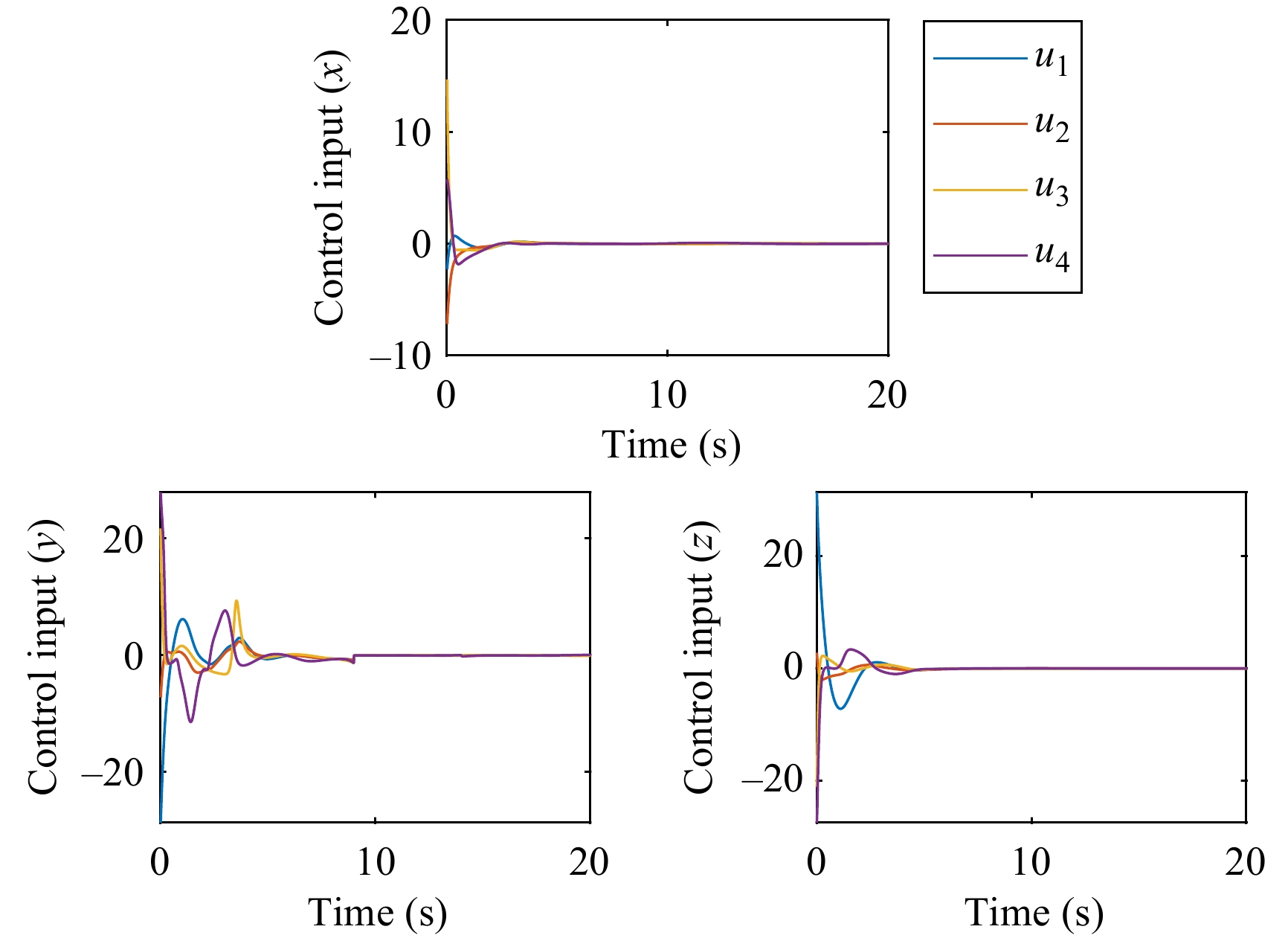
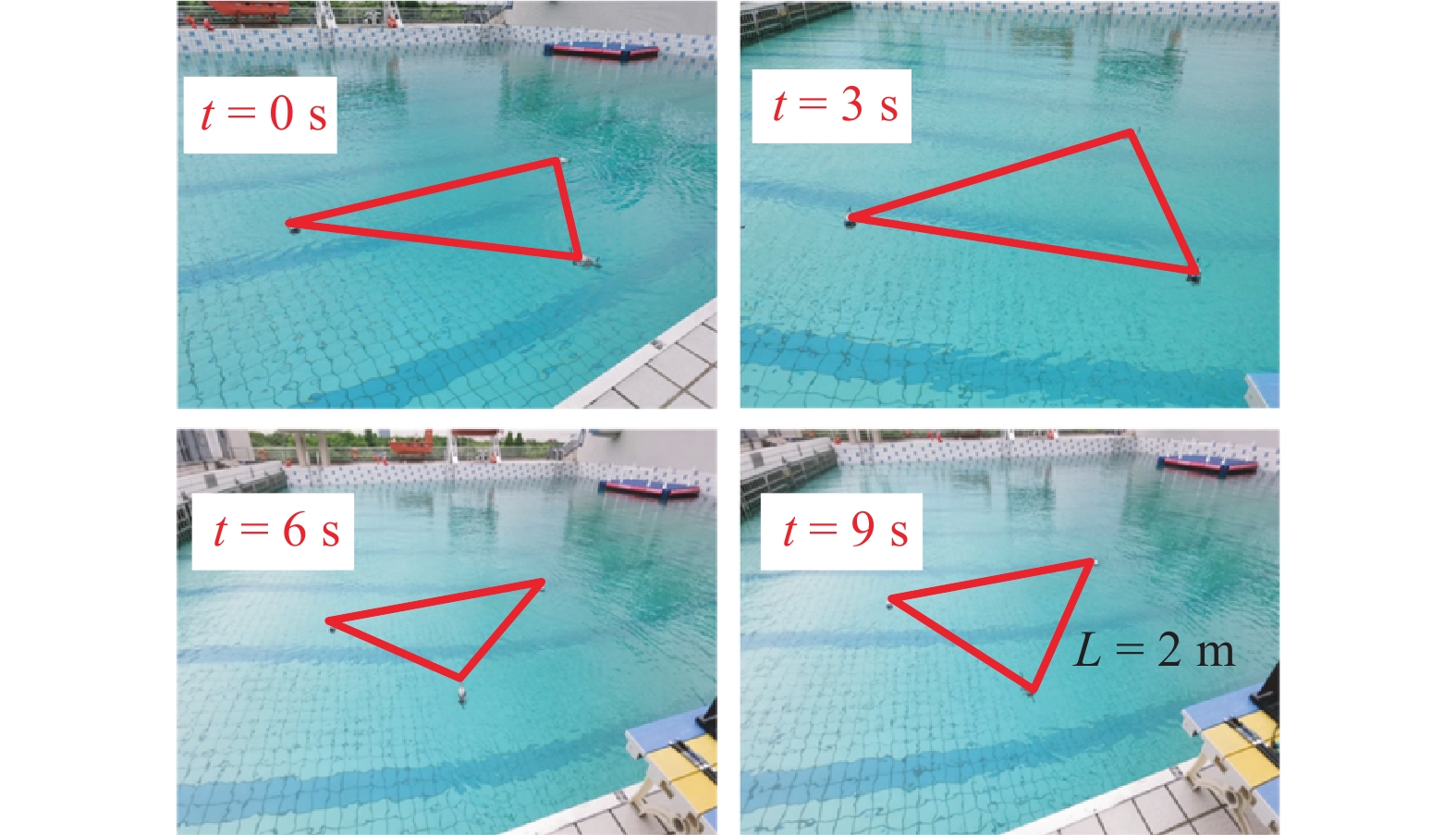
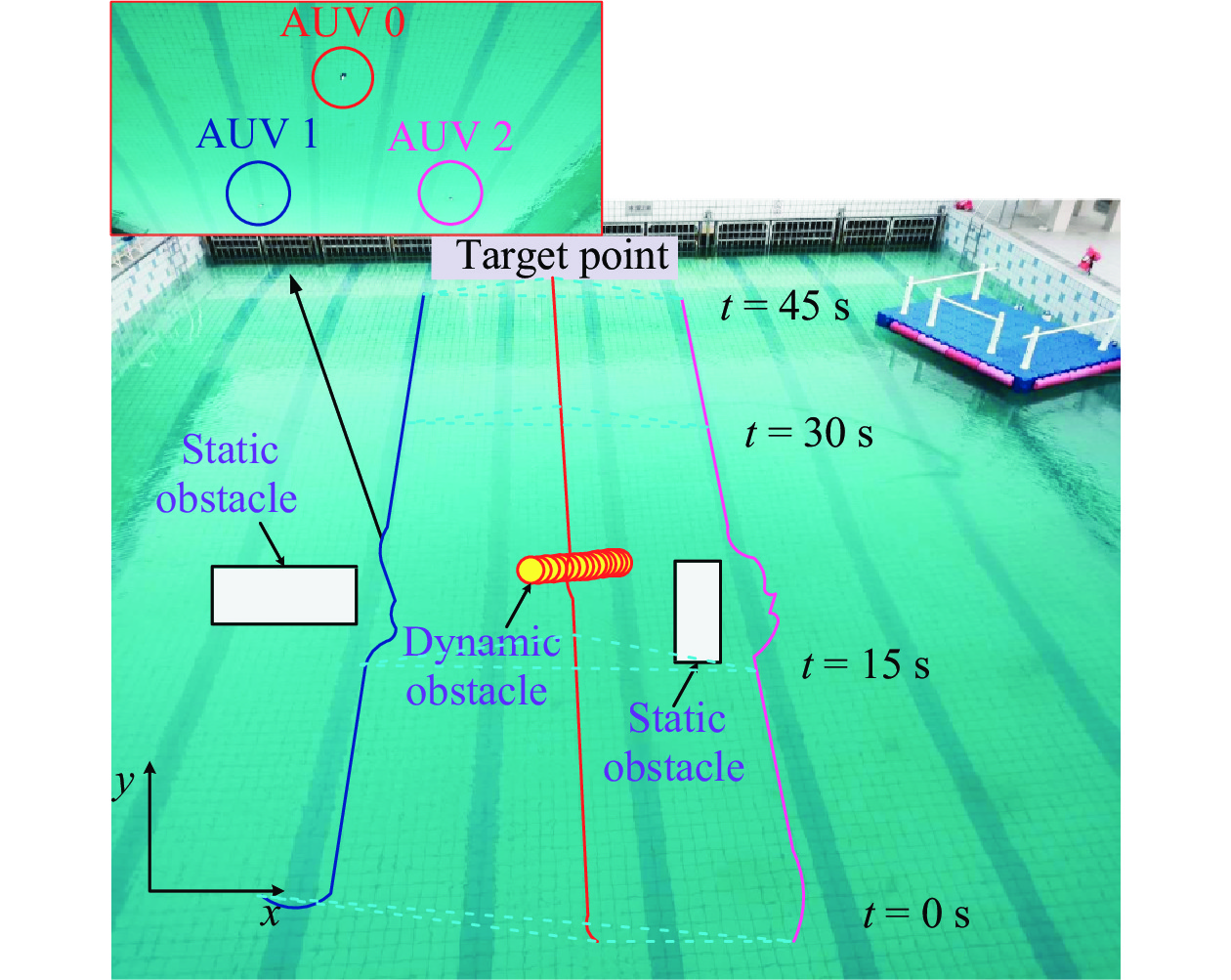
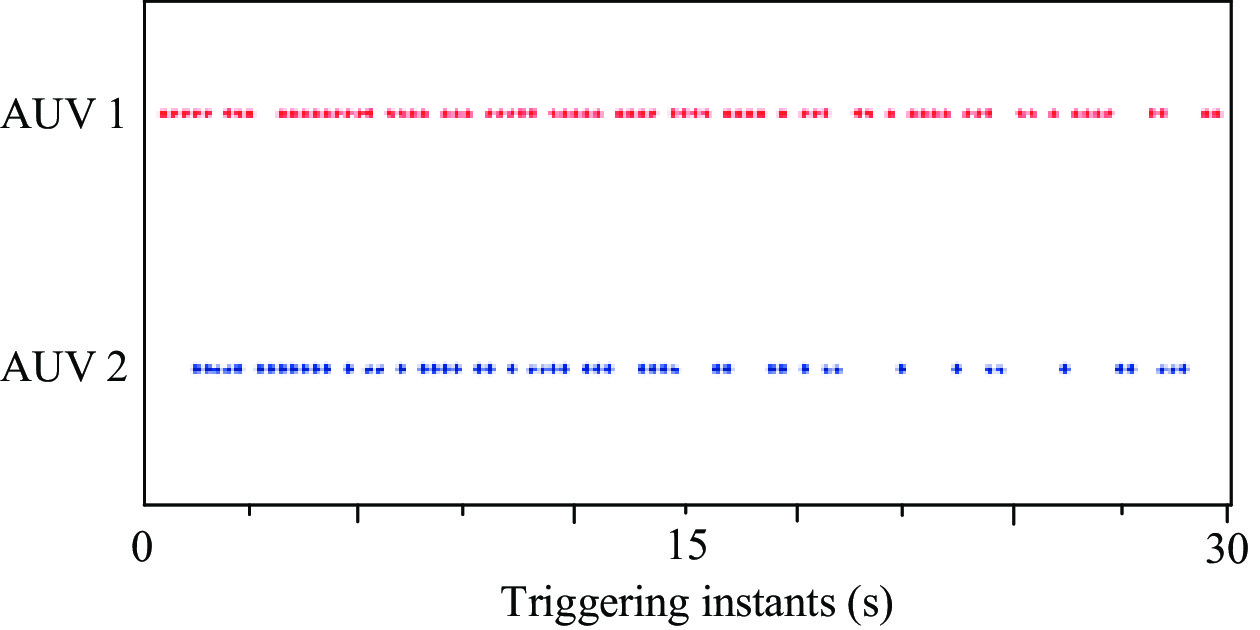
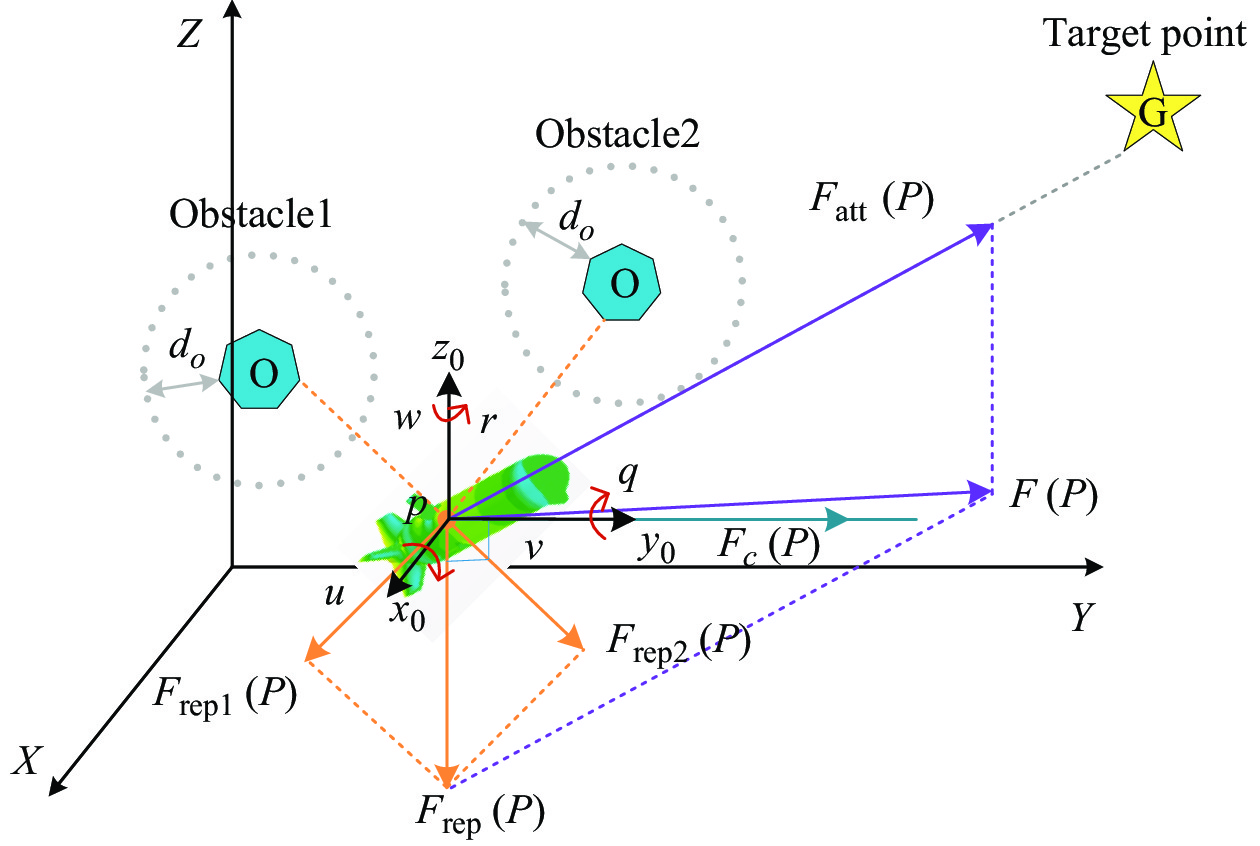
In this paper, the fixed-time event-triggered obstacle avoidance consensus control for a multi-AUV time-varying formation system in a 3D environment is presented by using an improved artificial potential field and leader-follower strategy (IAPF-LF). Firstly, the proposed fixed-time control can achieve the desired multi-AUV formation within a fixed settling time in any initial system state. Secondly, an event-triggered communication strategy is developed to govern the communication among AUVs, and the communication energy consumption can be decremented. The time-varying formation obstacle avoidance control algorithm based on IAPF-LF is designed to avoid static and dynamic obstacles, the desired formation is maintained in the presence of external disturbances, and there is no Zeno behavior under the fixed-time event-triggered consensus control strategy. The stability of the system is proved by the Lyapunov function and inequality scaling. Finally, simulation examples and water pool experiments are reported to verify the performance of the proposed theoretical algorithms.

| [1] |
S. Wang, L. Chen, D. B. Gu, and H. S. Hu, “Cooperative localization of AUVs using moving horizon estimation,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 1, pp. 68–76, Jan. 2014. doi: 10.1109/JAS.2014.7004622
|
| [2] |
H. Zhang, G. Feng, H. C. Yan, and Q. J. Chen, “Distributed self-triggered control for consensus of multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 1, pp. 40–45, 2014. doi: 10.1109/JAS.2014.7004618
|
| [3] |
C. Deng, M. J. Er, G. H. Yang, and N. Wang, “Event-triggered consensus of linear multiagent systems with time-varying communication delays,” IEEE Trans. Cybern., vol. 50, no. 7, pp. 2916–2925, Jul. 2020. doi: 10.1109/TCYB.2019.2922740
|
| [4] |
L. B. Liu, C. M. Luo, and F. R. Shen, “Multi-agent formation control with target tracking and navigation,” in Proc. IEEE Int. Conf. Information and Autom., Macao, China, 2017, pp. 98–103.
|
| [5] |
Y. Yang, Y. Xiao, and T. S. Li, “A survey of autonomous underwater vehicle formation: Performance, formation control, and communication capability,” IEEE Commun. Surv. Tutorials, vol. 23, no. 2, pp. 815–841, 2021. doi: 10.1109/COMST.2021.3059998
|
| [6] |
Y. Dong and J. Huang, “Consensus and flocking with connectivity preservation of uncertain Euler-Lagrange multi-agent systems,” J. Dyn. Syst. Meas. Control, vol. 140, no. 9, p. 091011, Sept. 2018. doi: 10.1115/1.4039666
|
| [7] |
D. Wang, N. Zhang, J. L. Wang, and W. Wang, “Cooperative containment control of multiagent systems based on follower observers with time delay,” IEEE Trans. Syst. Man Cybern. Syst., vol. 47, no. 1, pp. 13–23, Jan. 2017.
|
| [8] |
J. Long, W. Wang, C. Y. Wen, J. S. Huang, and J. H. Lv, “Output feedback based adaptive consensus tracking for uncertain heterogeneous multi-agent systems with event-triggered communication,” Automatica, vol. 136, p. 110049, Feb. 2022. doi: 10.1016/j.automatica.2021.110049
|
| [9] |
J. Liu, Y. L. Zhang, Y. Yu, and C. Y. Sun, “Fixed-time event-triggered consensus for nonlinear multiagent systems without continuous communications,” IEEE Trans. Syst. Man Cybern. Syst., vol. 49, no. 11, pp. 2221–2229, Nov. 2019. doi: 10.1109/TSMC.2018.2876334
|
| [10] |
H. Q. Li, G. Chen, T. W. Huang, Z. Y. Dong, W. Zhu, and L. Gao, “Event-triggered distributed average consensus over directed digital networks with limited communication bandwidth,” IEEE Trans. Cybern., vol. 46, no. 12, pp. 3098–3110, Dec. 2016. doi: 10.1109/TCYB.2015.2496977
|
| [11] |
C. C. Hua, S. Y. Liu, Y. F. Li, and X. P. Guan, “Distributed adaptive output feedback leader-following consensus control for nonlinear multiagent systems,” IEEE Trans. Syst. Man Cybern. Syst., vol. 50, no. 11, pp. 4309–4317, Nov. 2020. doi: 10.1109/TSMC.2018.2849740
|
| [12] |
Y. P. Guo, Y. Tian, Y. D. Ji, and Z. Ge, “Fixed-time consensus of nonlinear multi-agent system with uncertain disturbances based on event-triggered strategy,” ISA Trans., vol. 126, pp. 629–637, Jul. 2022. doi: 10.1016/j.isatra.2021.07.044
|
| [13] |
X. L. Shi, J. D. Cao, G. H. Wen, and M. Perc, “Finite-time consensus of opinion dynamics and its applications to distributed optimization over digraph,” IEEE Trans. Cybern., vol. 49, no. 10, pp. 3767–3779, Oct. 2019. doi: 10.1109/TCYB.2018.2850765
|
| [14] |
R. R. Nair, L. Behera, and S. Kumar, “Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances,” IEEE Trans. Control Syst. Technol., vol. 27, no. 1, pp. 39–47, Jan. 2019. doi: 10.1109/TCST.2017.2757448
|
| [15] |
Y. L. Cai, H. G. Zhang, Y. Liu, and Q. He, “Distributed bipartite finite-time event-triggered output consensus for heterogeneous linear multi-agent systems under directed signed communication topology,” Appl. Math. Comput., vol. 378, p. 125162, Aug. 2020.
|
| [16] |
B. D. Ning, Q. L. Han, Z. Y. Zuo, L. Ding, Q. Lu, and X. H. Ge, “Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies,” IEEE Trans. Ind. Inf., vol. 19, no. 2, pp. 1121–1135, Feb. 2023. doi: 10.1109/TII.2022.3201589
|
| [17] |
Z. Y. Zuo, J. W. Song, B. L. Tian, and M. Basin, “Robust fixed-time stabilization control of generic linear systems with mismatched disturbances,” IEEE Trans. Syst. Man Cybern. Syst., vol. 52, no. 2, pp. 759–768, Feb. 2022. doi: 10.1109/TSMC.2020.3010221
|
| [18] |
Z. Y. Zuo, “Nonsingular fixed-time consensus tracking for second-order multi-agent networks,” Automatica, vol. 54, pp. 305–309, Apr. 2015. doi: 10.1016/j.automatica.2015.01.021
|
| [19] |
J. J. Fu and J. Z. Wang, “Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties,” Syst. Control Lett., vol. 93, pp. 1–12, Jul. 2016. doi: 10.1016/j.sysconle.2016.03.006
|
| [20] |
Z. Y. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, Mar. 2020. doi: 10.1109/JAS.2020.1003057
|
| [21] |
D. V. Dimarogonas, E. Frazzoli, and K. H. Johansson, “Distributed event-triggered control for multi-agent systems,” IEEE Trans. Autom. Control, vol. 57, no. 5, pp. 1291–1297, May 2012. doi: 10.1109/TAC.2011.2174666
|
| [22] |
D. S. Xie, S. Y. Xu, Z. Li, and Y. Zou, “Event-triggered consensus control for second-order multi-agent systems,” IET Control Theory Appl., vol. 9, no. 5, pp. 667–680, Mar. 2015. doi: 10.1049/iet-cta.2014.0219
|
| [23] |
D. R. Ding, Z. D. Wang, D. W. C. Ho, and G. L. Wei, “Observer-based event-triggering consensus control for multiagent systems with lossy sensors and cyber-attacks,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 1936–1947, Aug. 2017. doi: 10.1109/TCYB.2016.2582802
|
| [24] |
J. Liu, Y. L. Zhang, Y. Yu, and C. Y. Sun, “Fixed-time leader-follower consensus of networked nonlinear systems via event/self-triggered control,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 11, pp. 5029–5037, Nov. 2020. doi: 10.1109/TNNLS.2019.2957069
|
| [25] |
X. W. Li, Z. Y. Sun, Y. Tang, and H. R. Karimi, “Adaptive event-triggered consensus of multiagent systems on directed graphs,” IEEE Trans. Autom. Control, vol. 66, no. 4, pp. 1670–1685, Apr. 2021. doi: 10.1109/TAC.2020.3000819
|
| [26] |
H. Liu, X. M. Li, M. F. Fan, G. H. Wu, W. Pedrycz, and P. N. Suganthan, “An autonomous path planning method for unmanned aerial vehicle based on a tangent intersection and target guidance strategy,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 4, pp. 3061–3073, Apr. 2022. doi: 10.1109/TITS.2020.3030444
|
| [27] |
H. Z. Xiao, Z. J. Li, and C. L. P. Chen, “Formation control of leader-follower mobile robots’ systems using model predictive control based on neural-dynamic optimization,” IEEE Trans. Ind. Electron., vol. 63, no. 9, pp. 5752–5762, Sept. 2016. doi: 10.1109/TIE.2016.2542788
|
| [28] |
A. J. Häusler, A. Saccon, A. P. Aguiar, J. Hauser, and A. M. Pascoal, “Energy-optimal motion planning for multiple robotic vehicles with collision avoidance,” IEEE Trans. Control Syst. Technol., vol. 24, no. 3, pp. 867–883, May 2016. doi: 10.1109/TCST.2015.2475399
|
| [29] |
A. Singla, S. Padakandla, and S. Bhatnagar, “Memory-based deep reinforcement learning for obstacle avoidance in UAV with limited environment knowledge,” IEEE Trans. Intell. Transp. Syst., vol. 22, no. 1, pp. 107–118, Jan. 2021. doi: 10.1109/TITS.2019.2954952
|
| [30] |
J. L. Yu, X. W. Dong, Q. D. Li, and Z. Ren, “Practical time-varying output formation tracking for high-order multi-agent systems with collision avoidance, obstacle dodging and connectivity maintenance,” J. Franklin Inst., vol. 356, no. 12, pp. 5898–5926, Aug. 2019. doi: 10.1016/j.jfranklin.2019.05.014
|
| [31] |
G. J. Han, X. Y. Qi, Y. Peng, C. Lin, Y. Zhang, and Q. Lu, “Early warning obstacle avoidance-enabled path planning for multi-AUV-based maritime transportation systems,” IEEE Trans. Intell. Transp. Syst., vol. 24, no. 2, pp. 2656–2667, Feb. 2023.
|
| [32] |
Z. H. Peng, D. Wang, T. S. Li, and M. Han, “Output-feedback cooperative formation maneuvering of autonomous surface vehicles with connectivity preservation and collision avoidance,” IEEE Trans. Cybern., vol. 50, no. 6, pp. 2527–2535, Jun. 2020. doi: 10.1109/TCYB.2019.2914717
|
| [33] |
G. Lee and D. Chwa, “Decentralized behavior-based formation control of multiple robots considering obstacle avoidance,” Intell. Serv. Rob., vol. 11, no. 1, pp. 127–138, Jan. 2018. doi: 10.1007/s11370-017-0240-y
|
| [34] |
J. Wu, C. B. Luo, Y. Luo, and K. Li, “Distributed UAV swarm formation and collision avoidance strategies over fixed and switching topologies,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 10969–10979, Oct. 2022. doi: 10.1109/TCYB.2021.3132587
|
| [35] |
W. Ren and R. W. Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,” IEEE Trans. Autom. Control, vol. 50, no. 5, pp. 655–661, May 2005. doi: 10.1109/TAC.2005.846556
|
| [36] |
W. Y. Gan, D. Q. Zhu, and D. X. Ji, “QPSO-model predictive control-based approach to dynamic trajectory tracking control for unmanned underwater vehicles,” Ocean Eng., vol. 158, pp. 208–220, Jun. 2018. doi: 10.1016/j.oceaneng.2018.03.078
|
| [37] |
H. G. Zhang, J. Duan, Y. C. Wang, and Z. Y. Gao, “Bipartite fixed-time output consensus of heterogeneous linear multiagent systems,” IEEE Trans. Cybern., vol. 51, no. 2, pp. 548–557, Feb. 2021. doi: 10.1109/TCYB.2019.2936009
|
| [38] |
Y. L. Cai, H. G. Zhang, Y. C. Wang, J. Zhang, and Q. He, “Fixed-time time-varying formation tracking for nonlinear multi-agent systems under event-triggered mechanism,” Inf. Sci., vol. 564, pp. 45–70, Jul. 2021. doi: 10.1016/j.ins.2021.02.071
|
Figures(20) / Tables(3)






 DownLoad:
DownLoad: