A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 5
Volume 10
Issue 5
IEEE/CAA Journal of Automatica Sinica
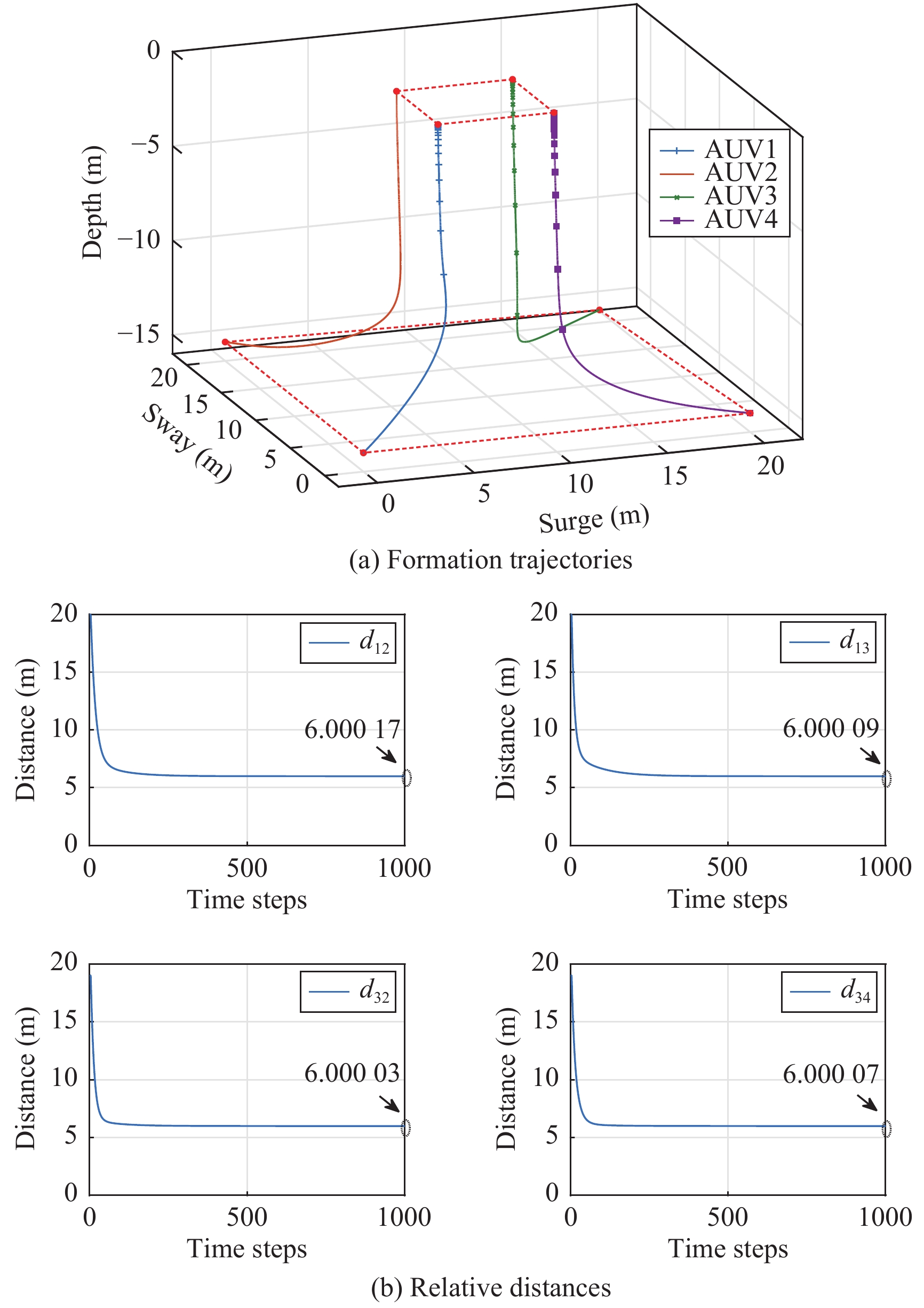
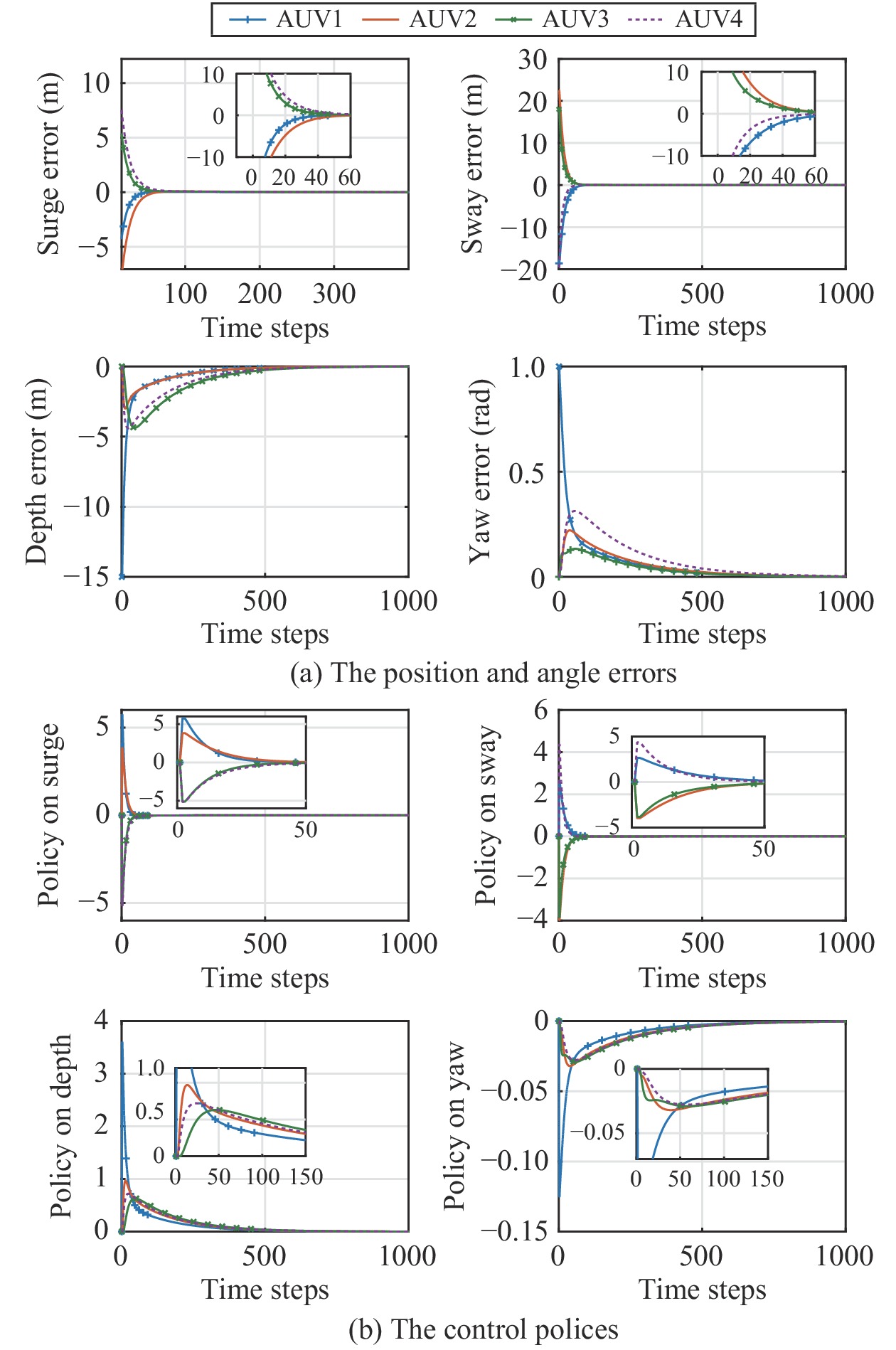
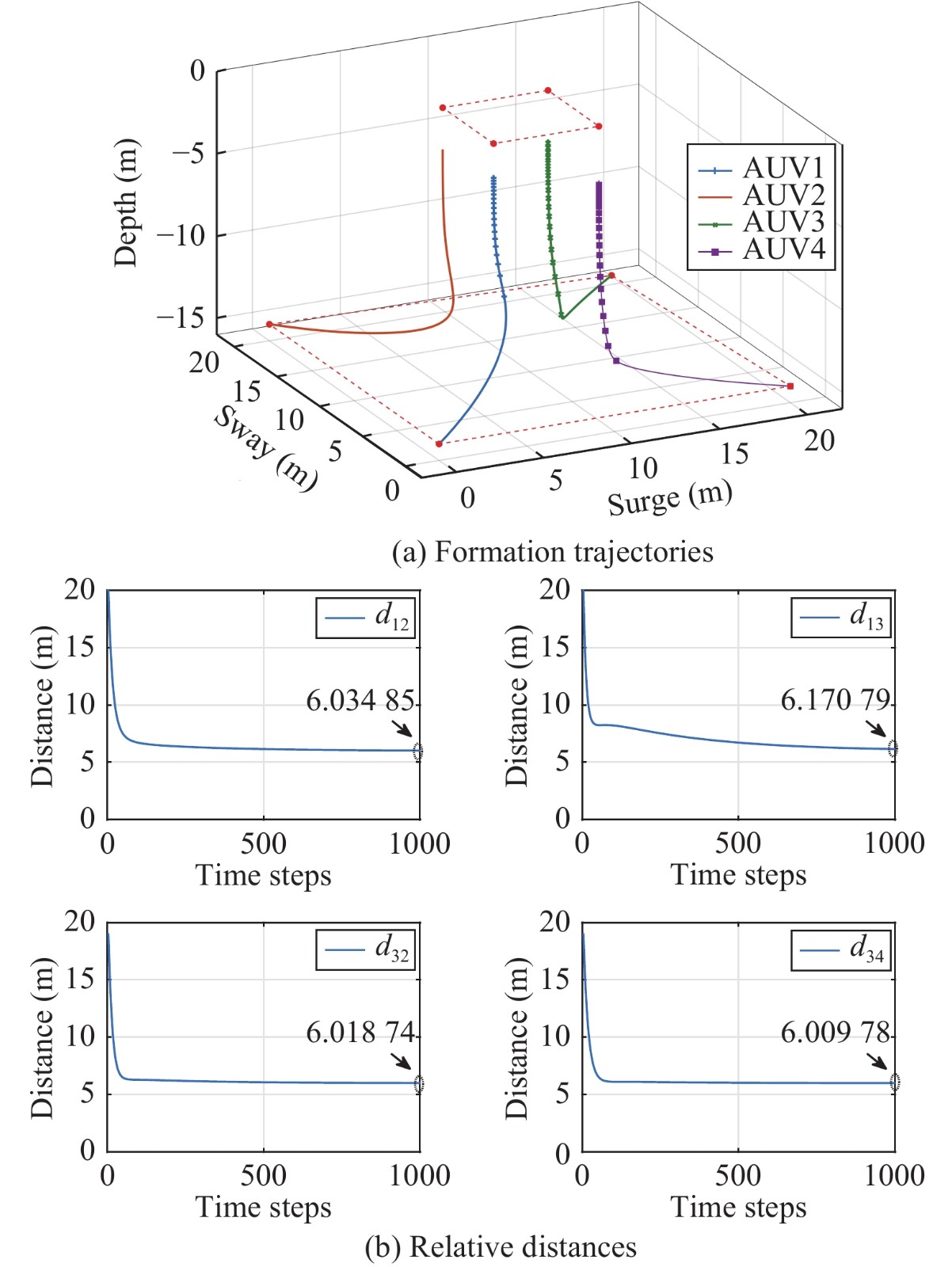
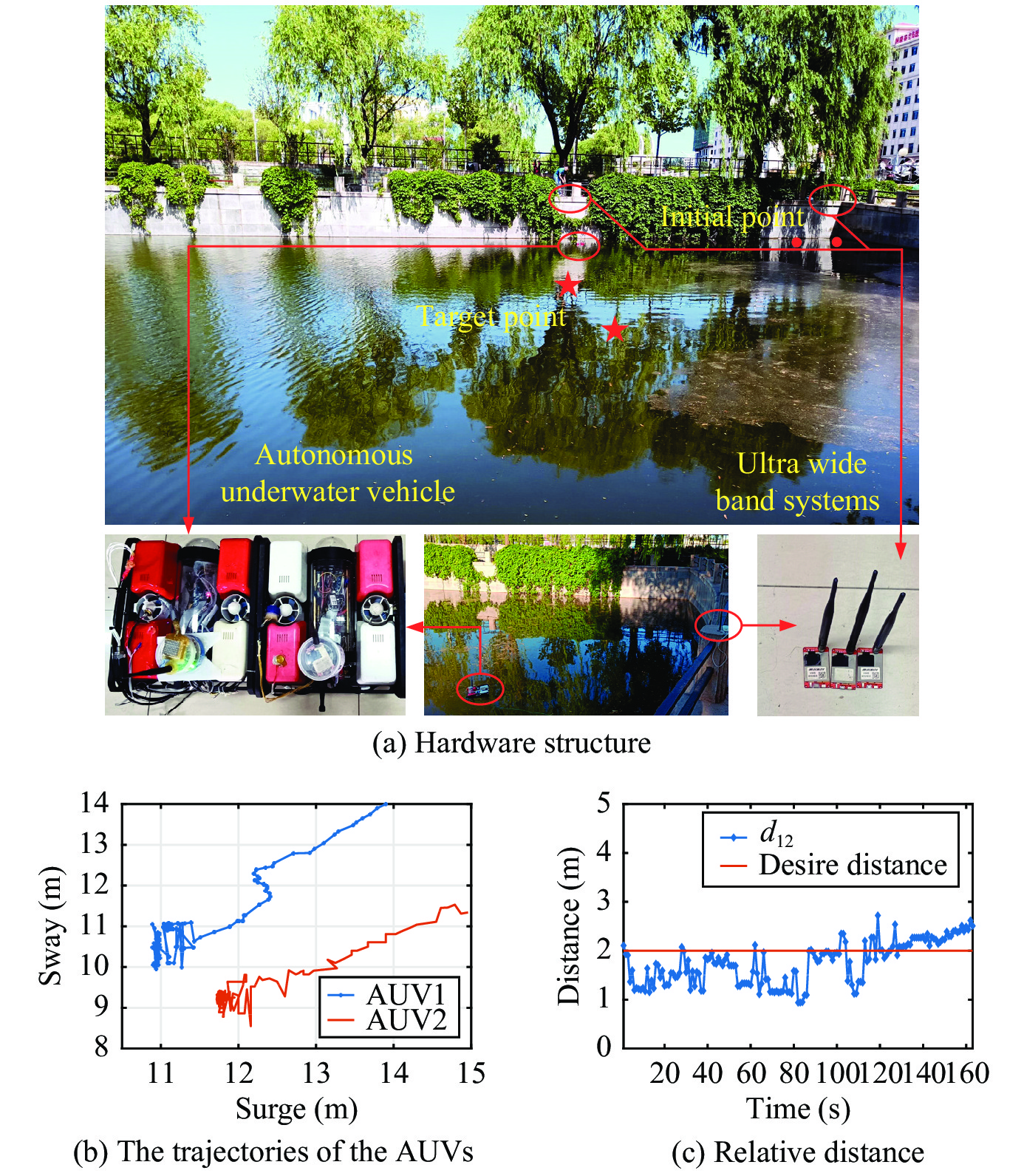
| Citation: | W. Q. Cao, J. Yan, X. Yang, X. Y. Luo, and X. P. Guan, “Model-free formation control of autonomous underwater vehicles: A broad learning-based solution,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1325–1328, May 2023. doi: 10.1109/JAS.2023.123165

|

| [1] |
L. Ma, Y. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 673–684, Mar. 2023. doi: 10.1109/JAS.2022.105509,2022
|
| [2] |
Y. Chen and P. Wei, “Coordinated adaptive control for coordinated path-following surface vessels with a time-invariant orbital velocity,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 4, pp. 337–346, Oct. 2014. doi: 10.1109/JAS.2014.7004662
|
| [3] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, Mar. 2020. doi: 10.1109/JAS.2020.1003057
|
| [4] |
Y. Zhao, Y. Ma, and S. Hu, “USV formation and path-following control via deep reinforcement learning with random braking,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 12, pp. 5468–5478, 2021. doi: 10.1109/TNNLS.2021.3068762
|
| [5] |
Y. Shou, B. Xu, A. Zhang, and T. Mei, “Virtual guidance-based coordinated tracking control of multi-autonomous underwater vehicles using composite ceural learning,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 12, pp. 5565–5574, Dec. 2021. doi: 10.1109/TNNLS.2021.3057068
|
| [6] |
C. Philip and Z. Liu, “Broad learning system: An effective and efficient incremental learning system without the need for deep architecture,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 1, pp. 10–24, Jan. 2018. doi: 10.1109/TNNLS.2017.2716952
|
| [7] |
L. Yuan, T. Li, C. Philip, Q. Shan, and M. Han, “Broad learning systembased learning controller for course control of marine vessels,” in Proc. 10th Int. Conf. Intell. Control Inf., 2019, pp. 133–136.
|
| [8] |
X. Gao, W. Bai, T. Li, L. Yuan, and Y. Long, “Broad learning systembased adaptive optimal control design for dynamic positioning of marine vessels,” Nonlinear Dyn., vol. 105, no. 1, pp. 1593–1609, 2021.
|
| [9] |
R. Cui, C. Yang, Y. Li, and S. Sharma, “Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning,” IEEE Trans. Syst. Man Cybern. Syst., vol. 47, no. 6, pp. 1019–1029, Jun. 2017. doi: 10.1109/TSMC.2016.2645699
|
| [10] |
J. Yan, X. Li, X. Luo, C. Hua, and X. Guan, “Integrated localization and tracking for AUV with model uncertainties via scalable sampling-based reinforcement learning approach,” IEEE Trans. Syst. Man Cybern., 2021. DOI: 10.1109/TSMC.2021.3129534
|
| [11] |
X. Sun and S. Ge, “Adaptive neural region tracking control of multifully actuated ocean surface vessels,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 1, pp. 77–83, 2014. doi: 10.1109/JAS.2014.7004623
|
| [12] |
J. Hao, G. Zhang, W. Liu, Y. Zheng, and L. Ren, “Data-driven tracking control based on LM and PID neural network with relay feedback for discrete nonlinear systems,” IEEE Trans. Ind. Electron., vol. 68, no. 11, pp. 11587–11597, Nov. 2021. doi: 10.1109/TIE.2020.3032872
|
Figures(6)






 DownLoad:
DownLoad: