, Available online , doi: 10.1109/JAS.2025.126011
Abstract:
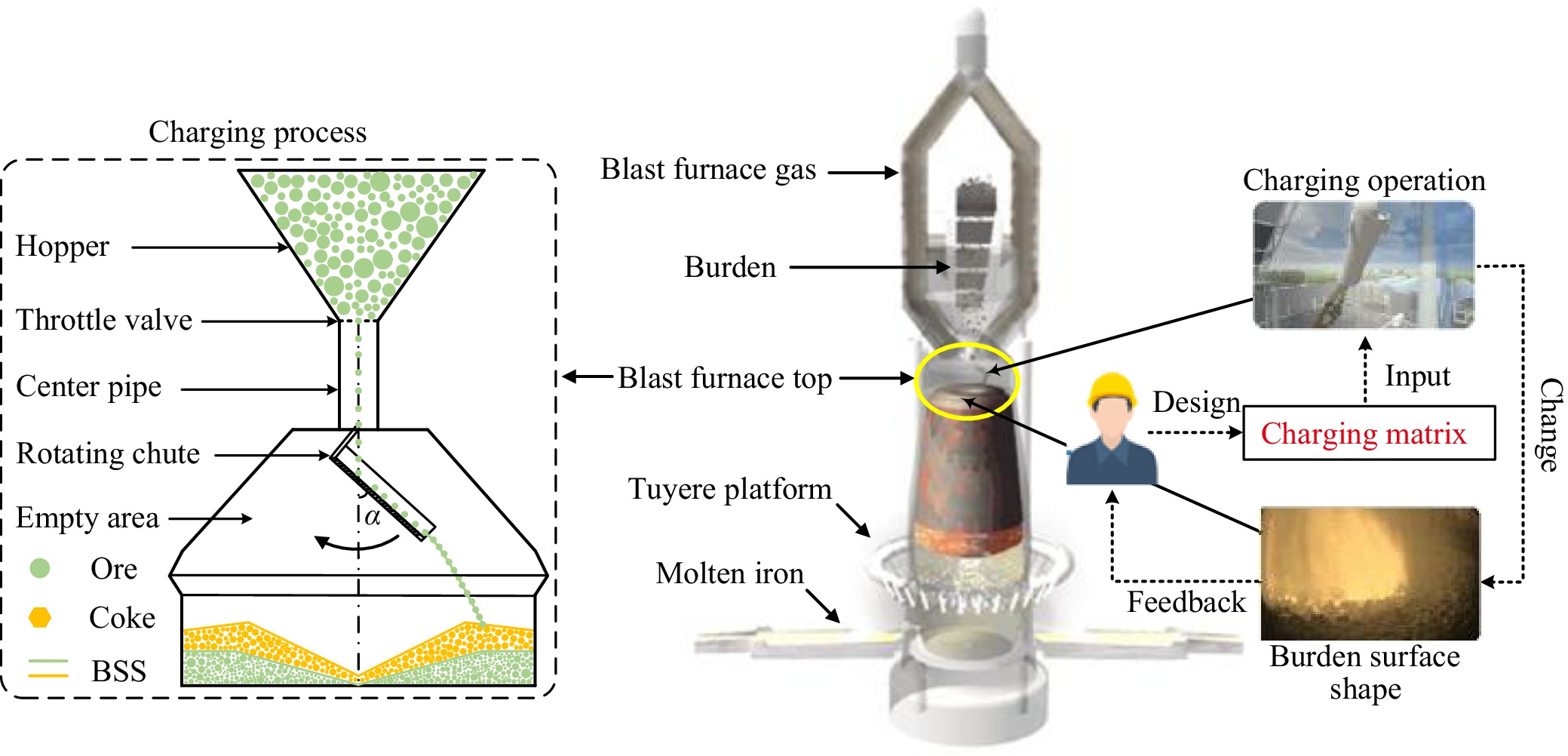
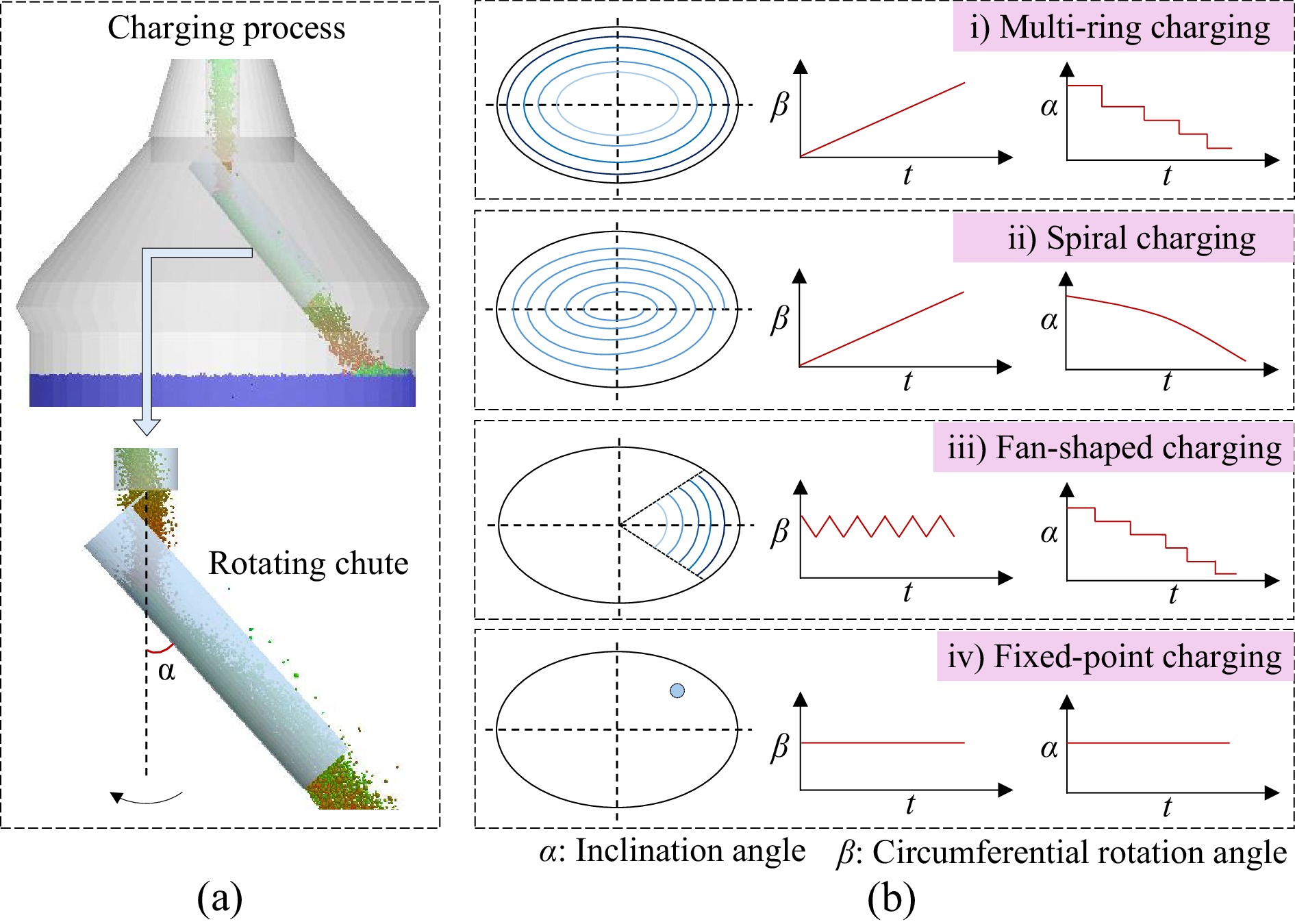
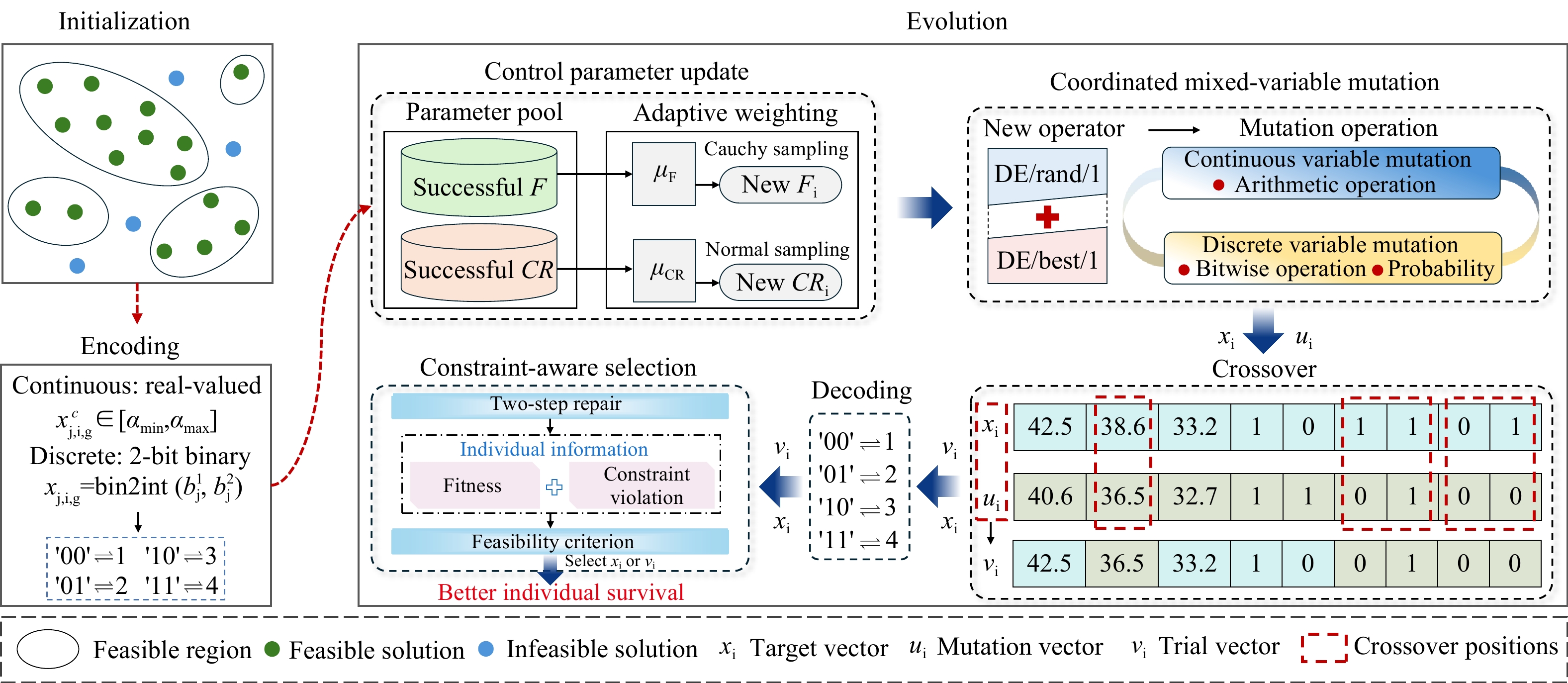
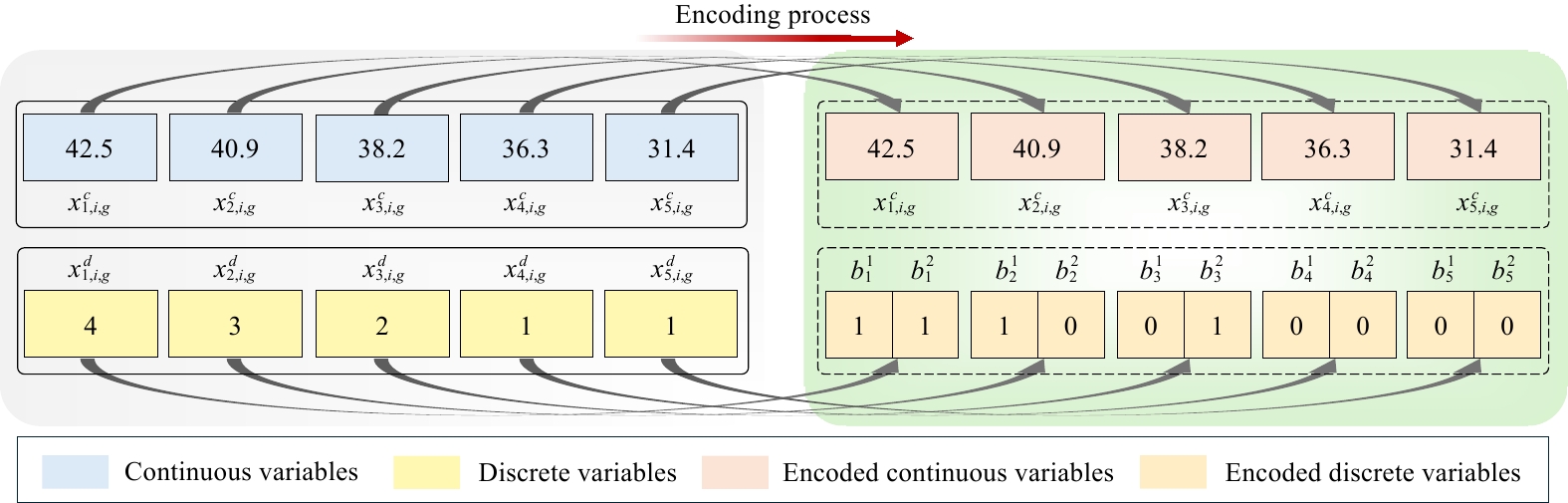
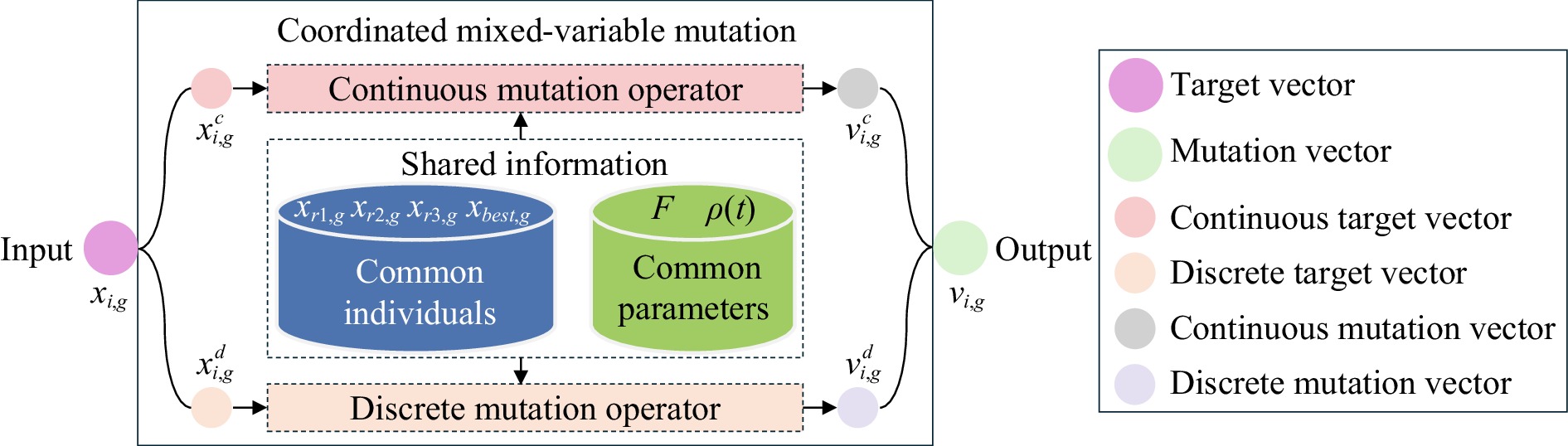
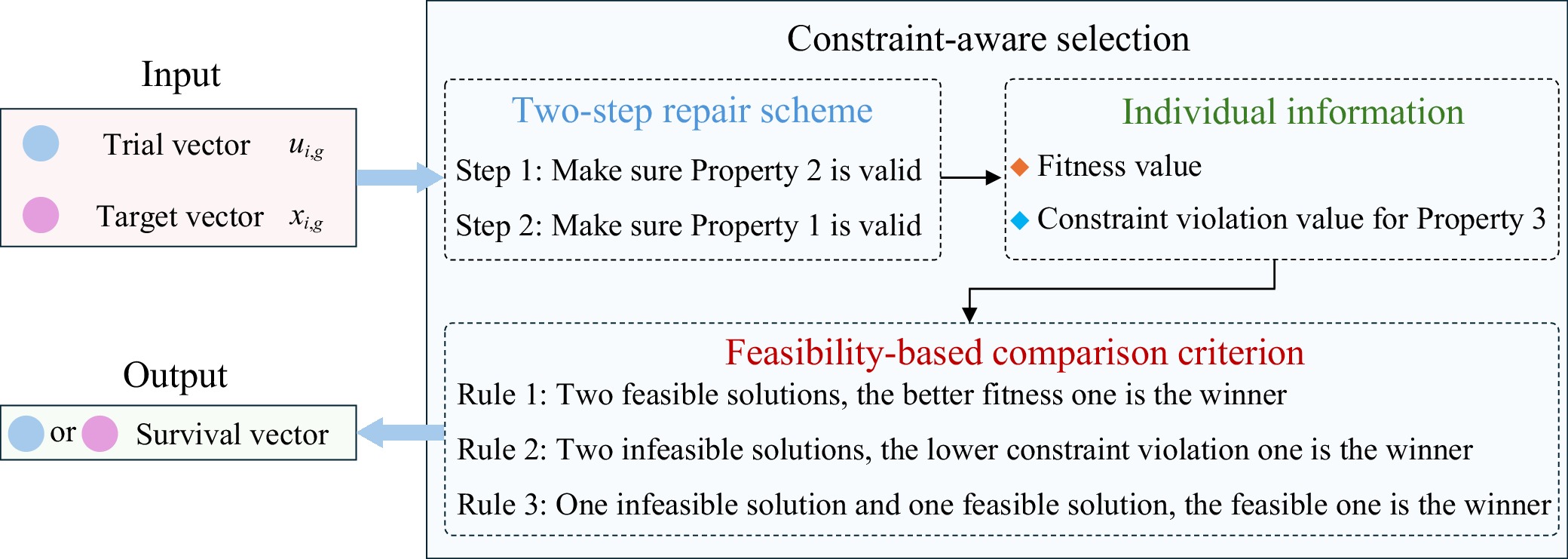
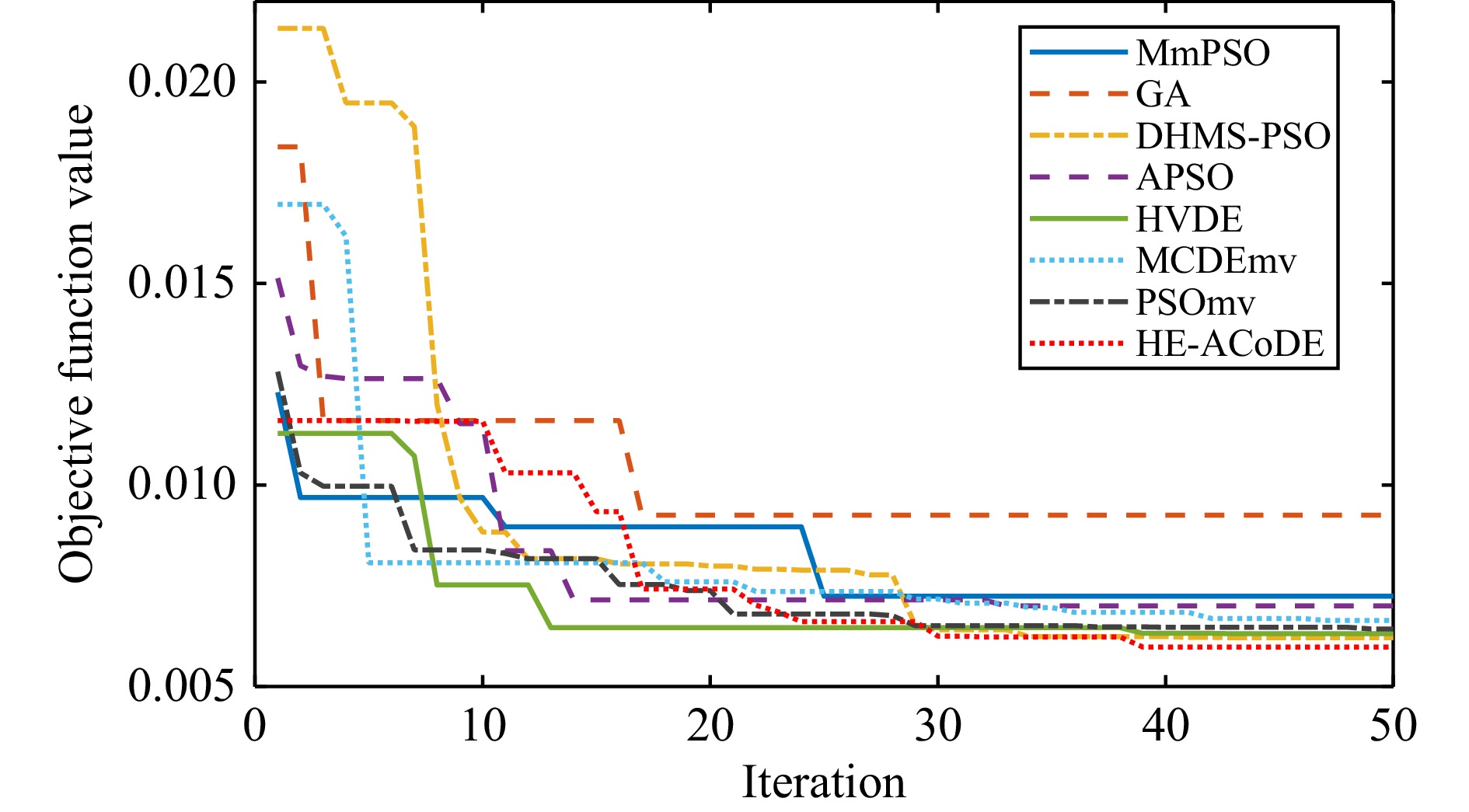
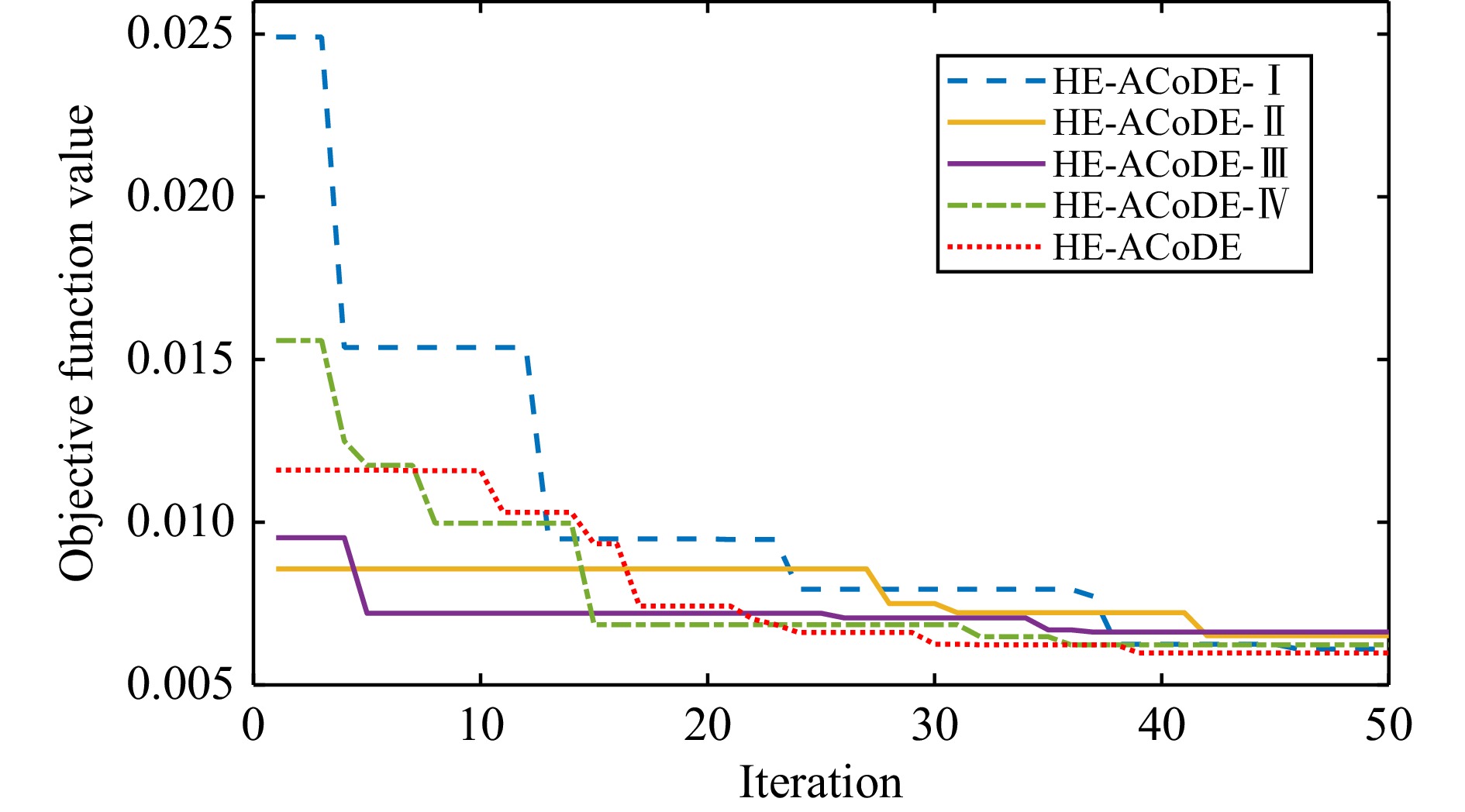
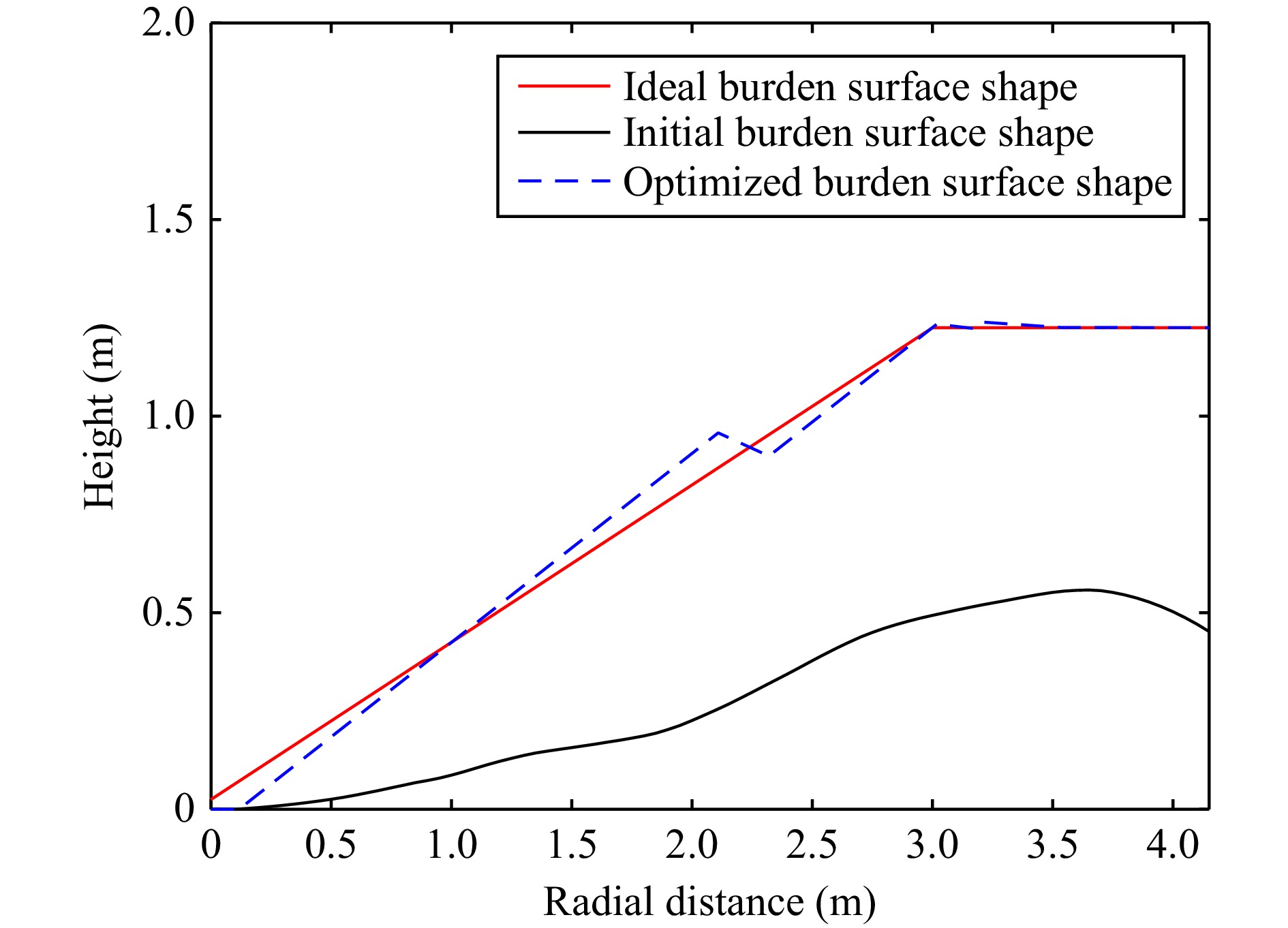
A well-designed charging matrix (CM) is crucial for advancing green and low-carbon production in the blast furnace (BF) ironmaking process. Over recent years, metaheuristics algorithms have been applied to optimize CM, partially reducing reliance on on-site workers. However, CM optimization is a challenging mixed-variable constraint optimization problem. Prior studies predominantly simplify CM to either continuous or discrete forms via variable fixation or type conversion, which hinders the efficient joint optimization of heterogeneous variables, limiting optimization accuracy and search efficiency. To tackle this barrier, this study proposes a novel method named Hybrid Encoding-based Adaptive Coordinated Differential Evolution (HE-ACoDE), marking the first attempt to optimize CM from a mixed-variable perspective. First, a hybrid encoding scheme is devised to provide a unified representation for the mixed variables in CM. Then, a coordinated mixed-variable mutation strategy is developed, effectively facilitating the synchronized evolution of continuous and discrete variables. Moreover, a constraint-aware selection operator and a weight-guided parameter adaptation strategy are proposed, which collaboratively guide the population toward feasible, high-quality solutions across different evolutionary stages and problem landscapes. Extensive comparison experiments on two industrial scenarios demonstrate that HE-ACoDE outperforms state-of-the-art CM optimization and mixed-variable optimization methods in terms of accuracy, stability, and convergence performance.
J. Zhu, Z. Jiang, D. Pan, H. Yu, C. Xu, K. Zhou, and W. Gui, “A hybrid encoding-based coordinated optimization method for charging matrix design in the blast furnace ironmaking process,” IEEE/CAA J. Autom. Sinica, early access, 2026. doi: 10.1109/JAS.2025.126011.





















































 E-mail Alert
E-mail Alert


