A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
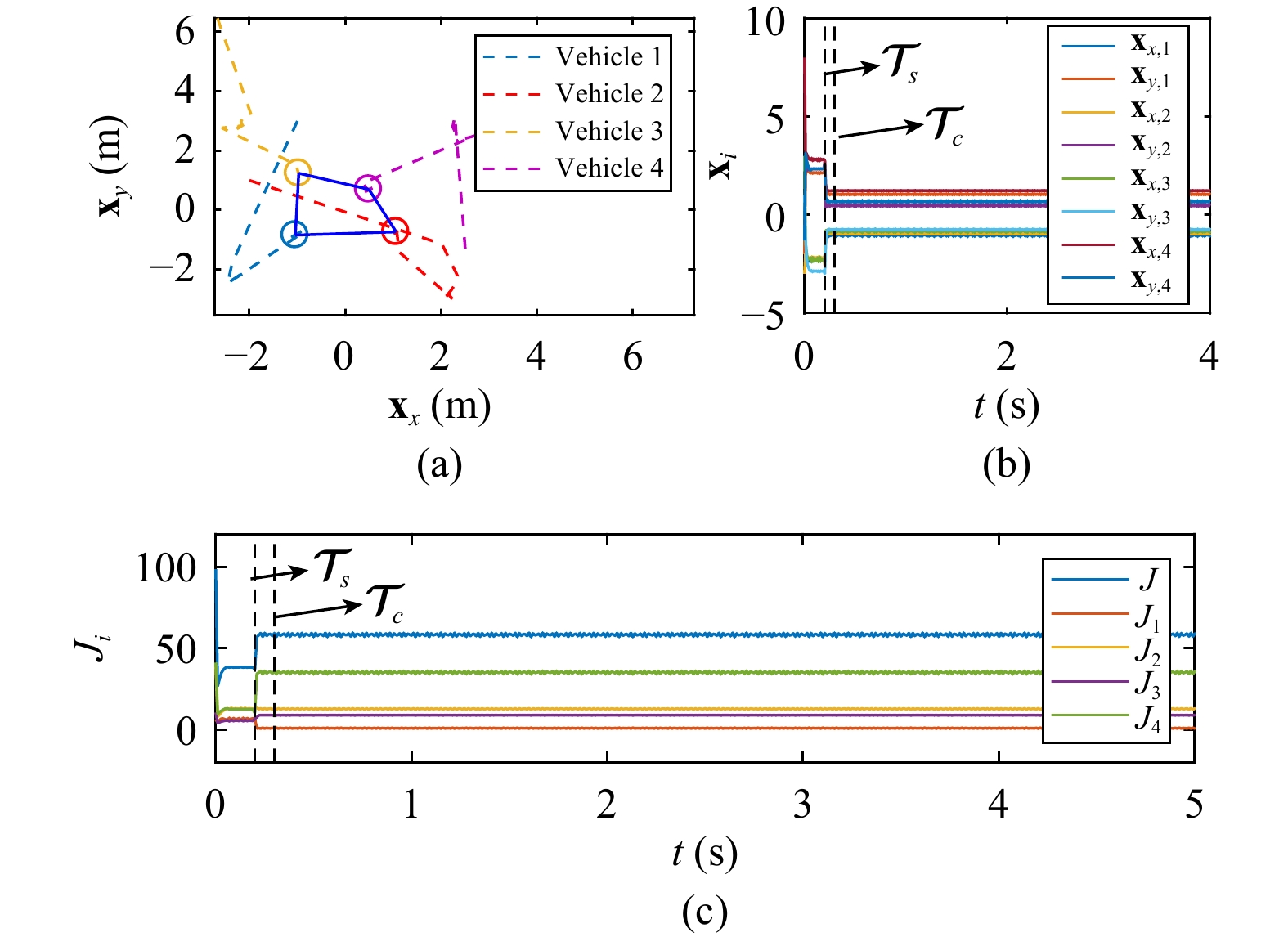
| Citation: | J.-Z. Xu, Z.-W. Liu, D. He, M.-F. Ge, and M. Chi, “Robust predefined-time control for optimal formation of networked mobile vehicle systems,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 4, pp. 1–3, Apr. 2025.

|

| [1] |
Z. Li, J. Deng, R. Lu, Y. Xu, J. Bai, and C. Y. Su, “Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach,” IEEE Trans. Systems,Man,and Cybern.: Systems, vol. 46, no. 6, pp. 740–749, 2015.
|
| [2] |
N. Gu, D. Wang, Z. Peng, J. Wang, and Q. L. Han, “Advances in line-of-sight guidance for path following of autonomous marine vehicles: An overview,” IEEE Trans. Systems,Man,and Cybern.: Systems, vol. 53, no. 1, pp. 12–28, 2022.
|
| [3] |
R. Olfati-Saber, “Flocking for multi-agent dynamic systems: Algorithms and theory,” IEEE Trans. Autom. Control, vol. 51, no. 3, pp. 401–420, 2006. doi: 10.1109/TAC.2005.864190
|
| [4] |
M. Firouzbahrami and A. Nobakhti, “Cooperative fixed-time/finite-time distributed robust optimization of multi-agent systems,” Automatica, vol. 142, p. 110358, 2022. doi: 10.1016/j.automatica.2022.110358
|
| [5] |
G. Chen and Z. Li, “A fixed-time convergent algorithm for distributed convex optimization in multi-agent systems,” Automatica, vol. 95, pp. 539–543, 2018. doi: 10.1016/j.automatica.2018.05.032
|
| [6] |
X. Wang, G. Wang, and S. Li, “A distributed fixed-time optimization algorithm for multi-agent systems,” Automatica, vol. 122, p. 109289, 2020. doi: 10.1016/j.automatica.2020.109289
|
| [7] |
A. Nedic and A. Ozdaglar, “Distributed subgradient methods for multi-agent optimization,” IEEE Trans. Autom. Control, vol. 54, no. 1, pp. 48–61, 2009. doi: 10.1109/TAC.2008.2009515
|
| [8] |
Z. Zuo, “Nonsingular fixed-time consensus tracking for second-order multi-agent networks,” Automatica, vol. 54, pp. 305–309, 2015. doi: 10.1016/j.automatica.2015.01.021
|
| [9] |
X. Wang, W. Liu, Q. Wu, and S. Li, “A modular optimal formation control scheme of multiagent systems with application to multiple mobile robots,” IEEE Trans. Industrial Electronics, vol. 69, no. 9, pp. 9331–9341, 2021.
|
| [10] |
A. J. Munoz-Vazquez, J. D. Sánchez-Torres, E. Jimenez-Rodriguez, and A. G. Loukianov, “Predefined-time robust stabilization of robotic manipulators,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1033–1040, 2019. doi: 10.1109/TMECH.2019.2906289
|

Figures(3)






 DownLoad:
DownLoad: