A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 2
Volume 12
Issue 2
IEEE/CAA Journal of Automatica Sinica
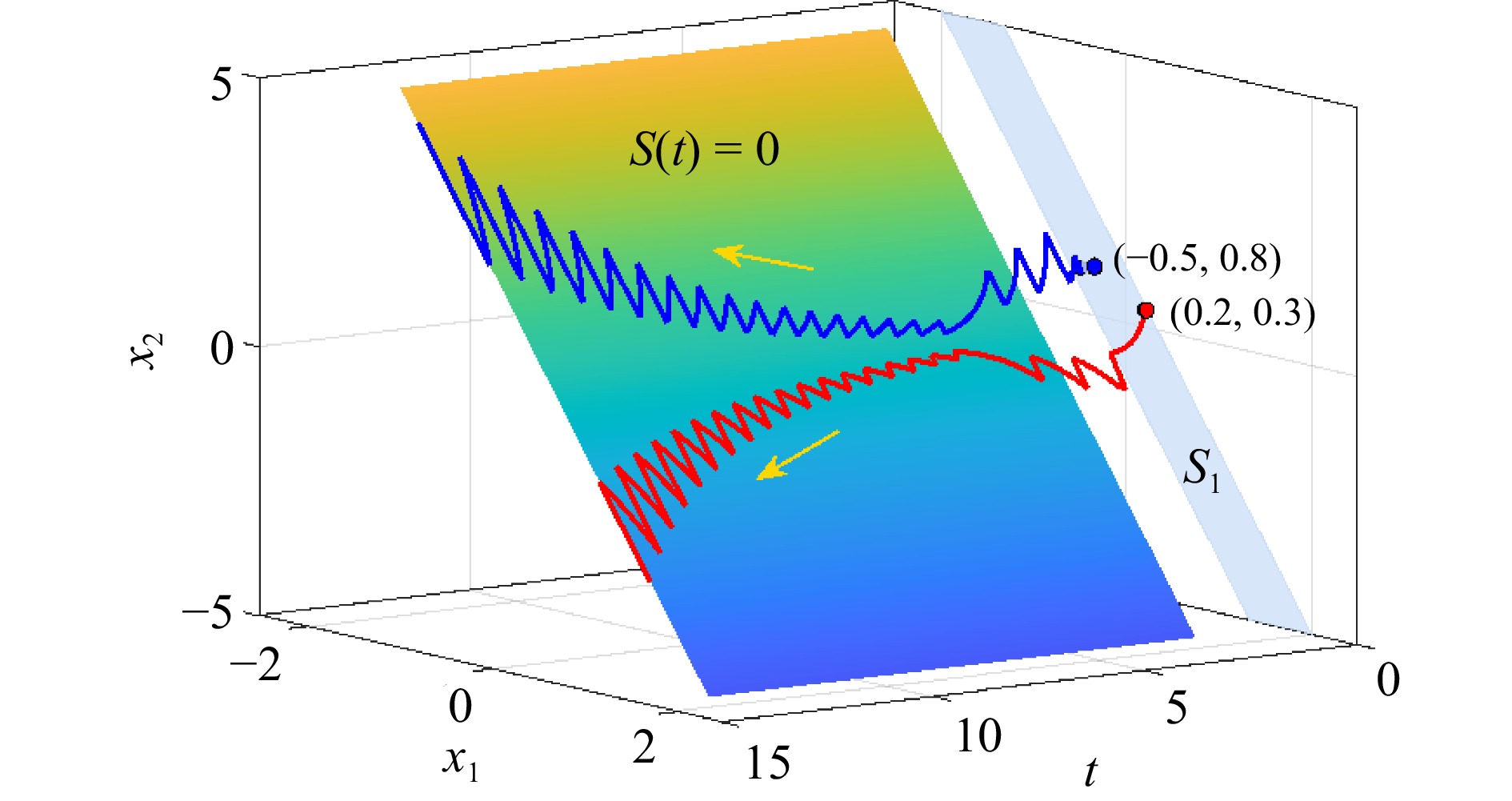
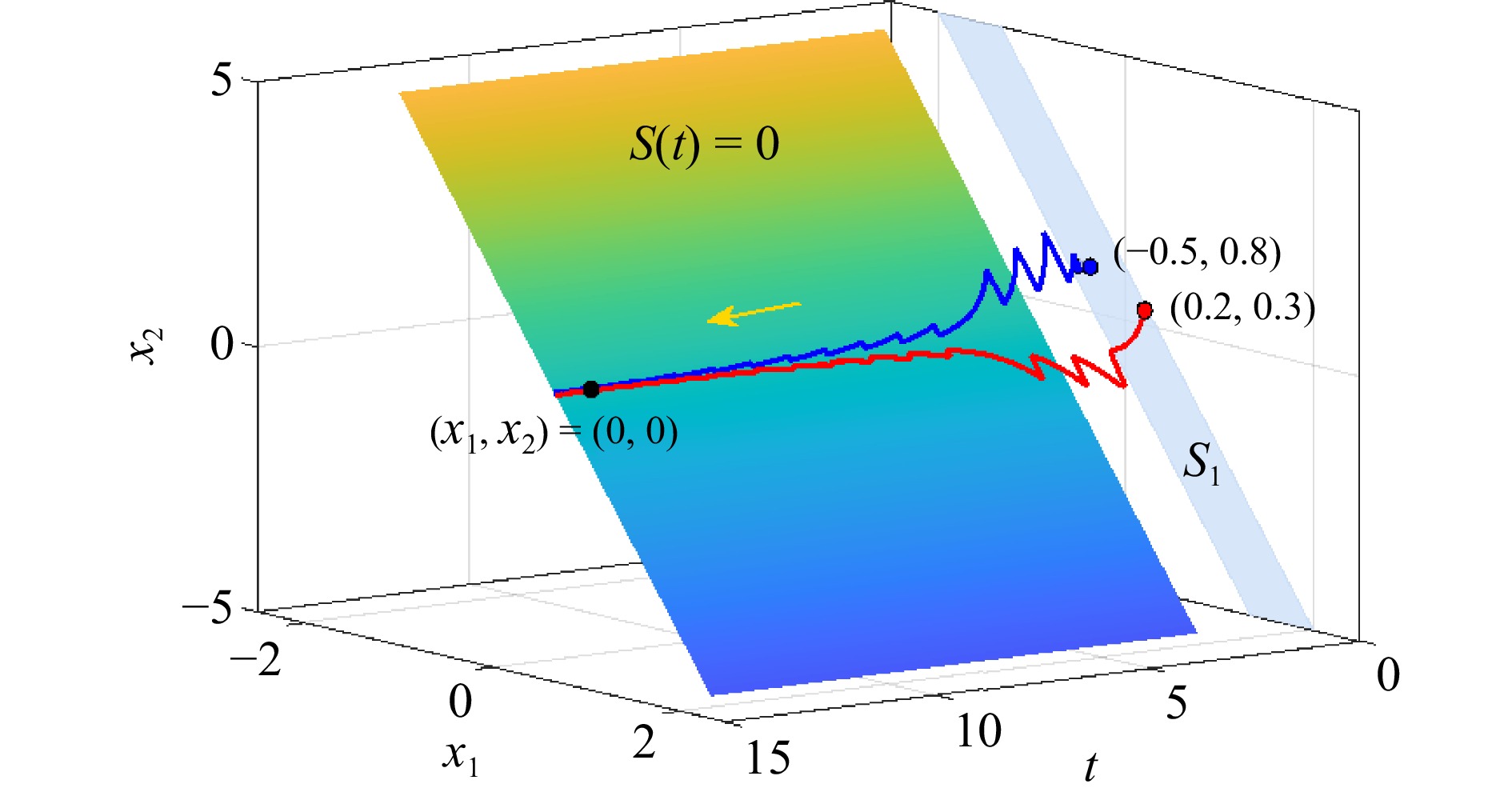
| Citation: | M. Yu and X. Li, “Exponential stability of impulsive system via saturated sliding mode control,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 2, pp. 469–471, Feb. 2025. doi: 10.1109/JAS.2024.124734

|

| [1] |
V. Lakshmikantham, D. Bainov, and P. Simeonov, Theory of Impulsive Differential Equations. Singapore: World Scientific, 1989, vol. 6.
|
| [2] |
Z. Xu, X. Li, and V. Stojanovic, “Exponential stability of nonlinear state-dependent delayed impulsive systems with applications,” Nonlinear Analysis: Hybrid Systems, vol. 42, p. 101088, 2021. doi: 10.1016/j.nahs.2021.101088
|
| [3] |
T. Yang, Impulsive Control Theory. Berlin Heidelberg, Germany: Springer Science & Business Media, 2001, vol. 272.
|
| [4] |
L. Wu, J. Liu, S. Vazquez, and S. K. Mazumder, “Sliding mode control in power converters and drives: A review,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 392–406, 2021.
|
| [5] |
B.-L. Zhang, Q.-L. Han, X.-M. Zhang, and X. Yu, “Sliding mode control with mixed current and delayed states for offshore steel jacket platforms,” IEEE Trans. Control Systems Technology, vol. 22, no. 5, pp. 1769–1783, 2013.
|
| [6] |
K. Rajagopal, A. Bayani, A. J. M. Khalaf, H. Namazi, S. Jafari, and V.-T. Pham, “A no-equilibrium memristive system with four-wing hyperchaotic attractor,” AEU-Int. J. Electronics and Communications, vol. 95, pp. 207–215, 2018. doi: 10.1016/j.aeue.2018.08.022
|
| [7] |
X. Li and Y. Zhao, “Sliding mode control for linear impulsive systems with matched disturbances,” IEEE Trans. Autom. Control, vol. 67, no. 11, pp. 6203–6210, 2021.
|
| [8] |
W.-H. Chen, X. Deng, and W. X. Zheng, “Sliding-mode control for linear uncertain systems with impulse effects via switching gains,” IEEE Trans. Autom. Control, vol. 67, no. 4, pp. 2044–2051, 2021.
|
| [9] |
Q. Shi, S. He, H. Wang, V. Stojanovic, K. Shi, and W. Lv, “Extended state observer based fractional order sliding mode control for steer-by-wire systems,” IET Control Theory & Applications, vol. 18, no. 17, pp. 2287–2295, Nov. 2024. doi: 10.1049/cth2.12569
|
| [10] |
X. Lyu and Z. Lin, “PID control of planar nonlinear uncertain systems in the presence of actuator saturation,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 90–98, 2021.
|
| [11] |
Q. Zhou, L. Wang, C. Wu, H. Li, and H. Du, “Adaptive fuzzy control for nonstrict-feedback systems with input saturation and output constraint,” IEEE Trans. Systems, Man, and Cybern.: Systems, vol. 47, no. 1, pp. 1–12, 2016.
|
| [12] |
B. Zhou, H. Gao, Z. Lin, and G.-R. Duan, “Stabilization of linear systems with distributed input delay and input saturation,” Automatica, vol. 48, no. 5, pp. 712–724, 2012. doi: 10.1016/j.automatica.2012.02.007
|
| [13] |
T. Hu and Z. Lin, Control Systems With Actuator Saturation: Analysis and Design. Springer Science & Business Media, 2001.
|
| [14] |
J. G. Da Silva and S. Tarbouriech, “Antiwindup design with guaranteed regions of stability: An LMI-based approach,” IEEE Trans. Autom. Control, vol. 50, no. 1, pp. 106–111, 2005. doi: 10.1109/TAC.2004.841128
|
| [15] |
L. Hua, K. Shi, Z.-G. Wu, S. Han, and S. Zhong, “Sliding mode control for recurrent neural networks with time-varying delays and impulsive effects,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1319–1321, 2023. doi: 10.1109/JAS.2023.123372
|
Figures(2)






 DownLoad:
DownLoad: