Figure
1.
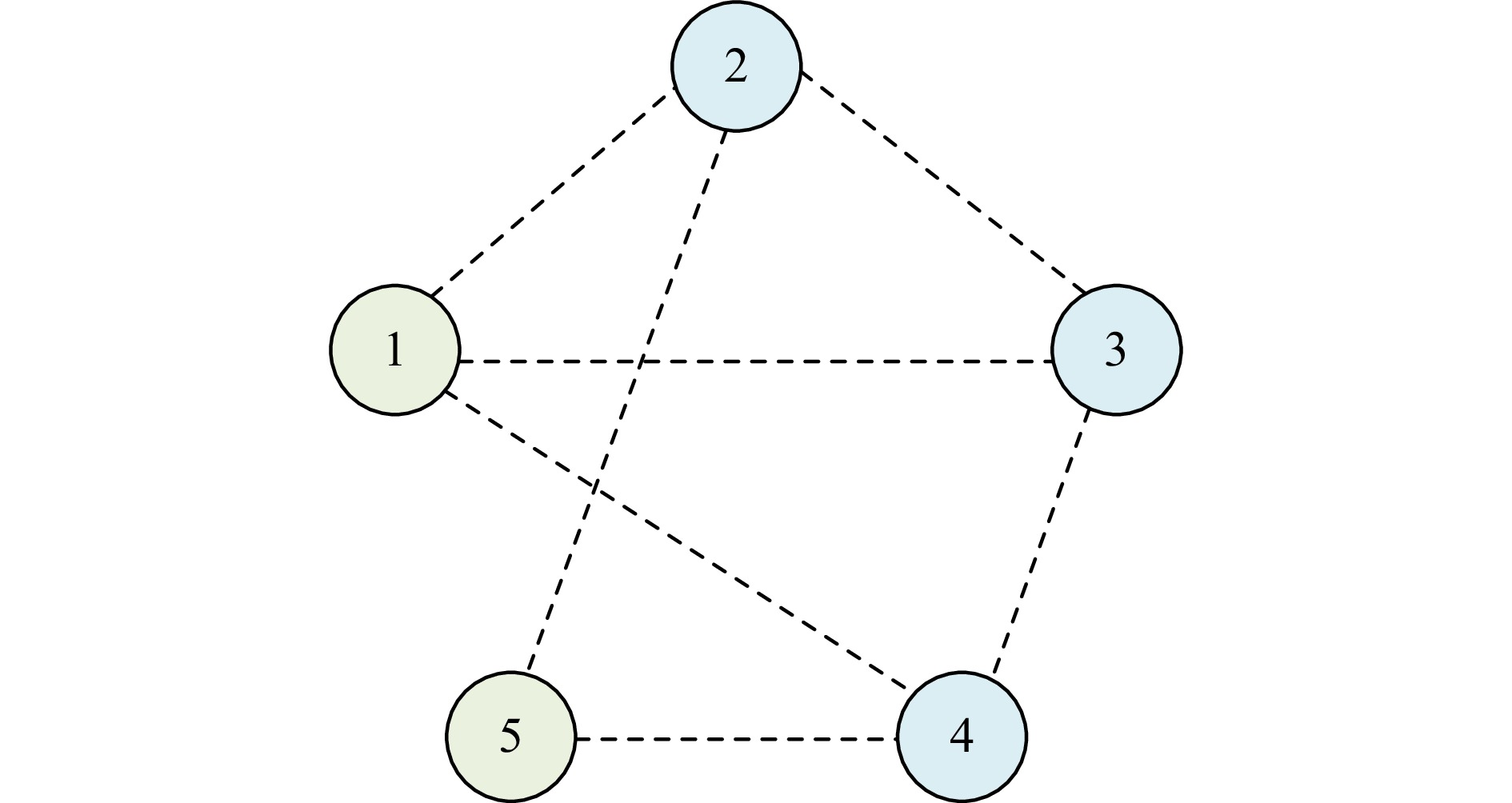
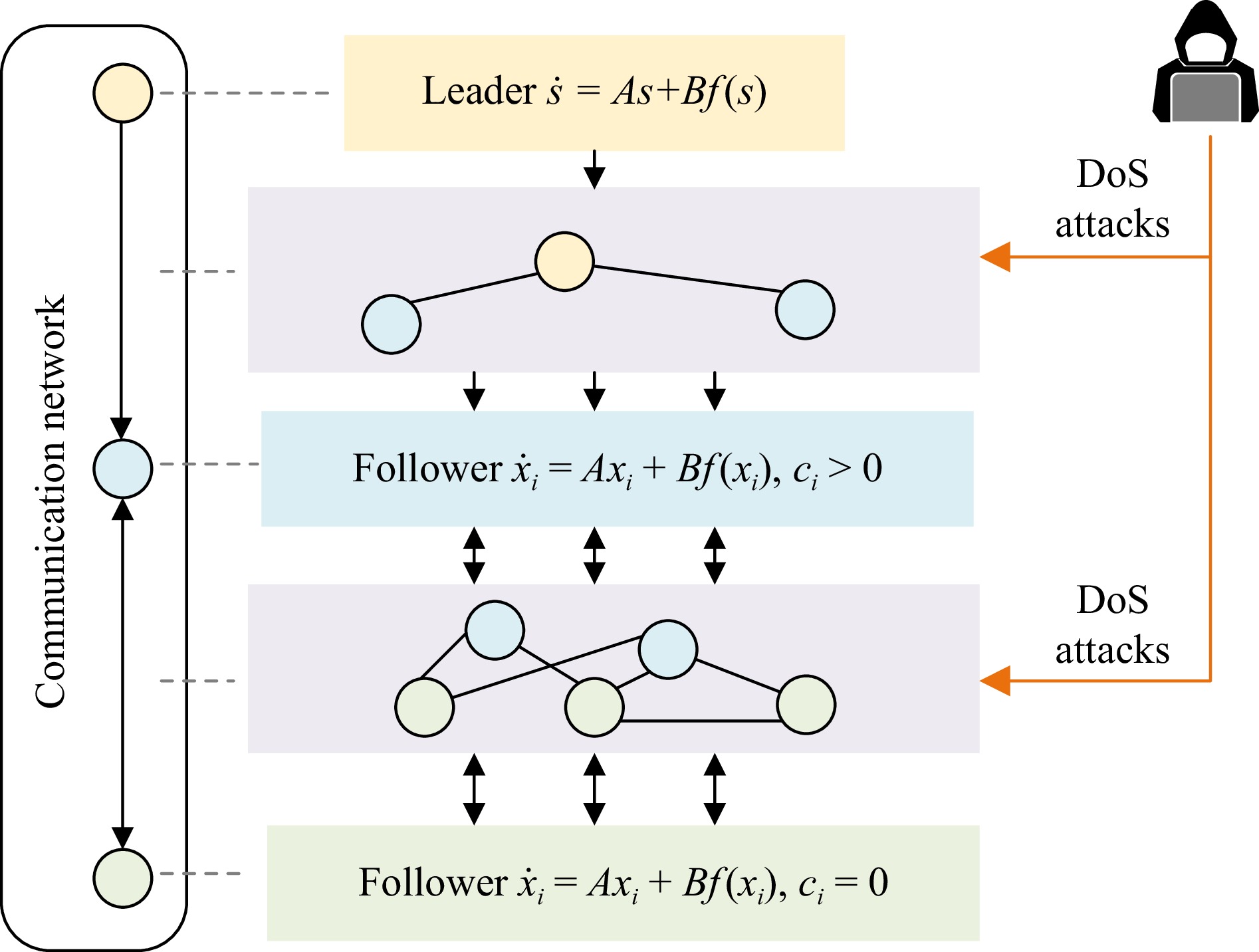
Multi-agent system under DoS attacks.
 Volume 12
Issue 2
Volume 12
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Wang, D. Yu, and X. Li, “Impulsive consensus of MASs with input saturation and DoS attacks,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 2, pp. 414–424, Feb. 2025. doi: 10.1109/JAS.2024.124944

|
WITH the development of information science, more and more attention has been paid to multi-agent systems (MASs) due to their wide application in many fields, such as power systems [1], team robots, unmanned aerial vehicles [2]. Typically, the agent in the system shares each piece of information with its neighboring agents to achieve a specific global agreement, called consensus. Many scholars have studied the field and obtained great results [3]–[5]. As a special consensus problem, the leader-follower consensus is mainly about how to design a distributed controller to drive the followers to follow the leader, and only some following agents can receive the information from the leader. Due to the application of formation control, the leader-follower consensus problem attracts many scholars and some great results are obtained, see details about recent advances in [6].
Although communication between agents becomes more and more convenient due to the rapid development of the information technique, it has led to a number of security risks. The communication between the agents faces a greater likelihood of attacks. For example, the Stuxnet storm targeting the Iranian nuclear facility [7], the distributed denial of service (DoS) attacks targeting the U.S. banking sector [8] and the Maroochy water breach [9]. Due to the serious damage caused by cyber attacks, the security control of MASs becomes a hot topic in recent years, and many scholars have studied the problem through different methods. Reference [10] studied the distributed consensus control under DoS attacks. Reference [11] considered multiple cyber attacks and designed an event-based leader-follower control method. Reference [12] studied the sensor attacks and designed distributed secure state estimation.
It should be noted that cyber-attacks are launched through communication networks. This means that the fewer communication resources a system requires, the less impact it may suffer from such attacks. Due to the weak dependence on communication quality, as it only needs to transmit little information at certain moments, impulsive control and sampled-data control have advantages over continuous control methods under DoS attacks. Impulsive control emphases on quick adjustments at specific moments, while sampled-data control focuses more on achieving consistency through a continuous sampling process. Thus, many scholars have studied impulsive control and sampled-data control under cyber attacks. Reference [13] considered the aperiodic sampled-data $ H_\infty $ with the network delay. Reference [14] studied the impulsive control for the uncertain fraction-order delayed MASs with DoS attacks. Reference [15] studied the sampled-data synchronization problem for stochastic Markovian jump neural networks. Reference [16] analyzed the stability of nonlinear systems subject to deception attacks, and [17] investigated the secure impulsive synchronization for MASs under deception attacks. Furthermore, [18] studied the secure fault-tolerant output regulation of MASs with cyber attacks and asynchronous communication.
Saturation is ubiquitous in the real world. The control signal in a system with input saturation is limited due to the practical environment, and it will lead to the system performance being different from the expected one. How to control the system to achieve expected performance is the vital problem of saturation control. According to the universality of the problem in actual engineering, many scholars have studied the control with saturation and engaged the field’s rapid development. Reference [19] studied the nonlinear feedback control design approach for the linear singular systems subject to input saturation. Reference [20] designed a tracking controller for uncertain nonlinear systems with input saturation. Reference [21] considered the state and output feedback and investigated the global stabilization of nonlinear systems with input saturation. Reference [22] proposed a formation control method for nonlinear MASs subject to input saturation based on broad learning system. However, the method to process the input saturation still remained the same as for single-agent systems. How to design an input saturation processing method that is more suitable for processing multiple-agent systems remained to be studied.
In past research on the control of MASs under DoS attacks, there exist three methods to describe the DoS attacks: constrained sequence, switching topology, and random topology. Compared with the others, random topology has the fewest constraints on the DoS attacks and is more general. Under this modeling method, the stability of the system belongs to the almost sure stability, and the analysis of the system trajectory is difficult. However, in engineering, the range of system trajectory is important to ensure safety. Thus, it is necessary to analyze the trajectory boundary of systems subject to DoS attacks. For the normal system, the system trajectory has been fully studied. Reference [23] investigated the prescribed performance resilient control under DoS attacks. Considering input saturation, [24] proposed an impulsive control method and analyzed the domain of the attraction. How to estimate the boundary of multi-agent system trajectory under cyber attacks still remains to be studied.
Motivated by the above discussion, this paper studies the leader-follower consensus with the impulsive sequence under the random DoS attacks. Considering input saturation, a secure impulsive control method is constructed for a class of MASs. The domain of attraction under DoS attacks is estimated. With the consideration of input saturation and DoS attacks, a non-conservative boundary of the system gets estimated. The main contributions are outlined below.
1) In contrast to the studies in [25] and [26], which respectively studied input saturation and DoS attacks, this paper investigates MASs confronting both DoS attacks and input saturation. Since the random impulsive signal intensity caused by DoS attacks complicates the analysis and processing of input saturation, the trajectory boundary of the system is analyzed and the saturation problem of the random impulsive signal intensity is resolved within this paper. Furthermore, this paper proves the almost sure local exponential stability of the MASs subject to DoS attacks and input saturation.
2) Compared with [27], [28], which lack the consideration for the security of the MASs, this paper investigates the boundary of the system trajectory and analyzes the domain of attraction of multi-agent system under DoS attacks. Given the impact of DoS attacks, this paper investigates the trajectory boundary and offers estimations of the conservative and non-conservative boundaries for the system trajectory.
3) A new method is proposed to resolve the issue of input saturation for MASs. Compared with the conventional method for single-agent systems, the constraint is extended to a general form by solving the problem caused by the matrix multiplication. Furthermore, owing to the matrix form constraint, this method can be easily implemented in software to solve DoS attacks problem.
The rest of this paper is arranged as follows. Preliminaries introduce the necessary notions and math methods. Main result introduces the theorems and the corresponding proofs. Furthermore, an analysis of the domain of attraction for MASs is given. Finally, an example is provided to demonstrate the correction of the theorems in the last section.
Notations: For integers $ b > a >0 $, $ \mathscr{I}[a,b] $ denotes the set $ \left\{a,a+1,\ldots,b\right\} $. For given $ A\in \mathbb{R}^{n\times n} $, $ \lambda_{\max}(A) $ and $ \lambda_{\min}(A) $ denote its maximum eigenvalue and minimum eigenvalue respectively, $A \succ 0\;(\prec 0)$ denotes that $\forall x\in \mathbb{R}^n, x^TAx > 0\;( < 0)$, and if A is also symmetric, then matrix A is positive definite (negative definite), denoted as $ A>0 $ ($ <0 $). For given vector $ x = [ x_1\;\;x_2\;\;\cdots\;\;x_n ]^T \in \mathbb{R}^n $ and matrix $ K = [k_{ij}]_{n\times m} \in \mathbb{R}^{n\times m} $, $\Vert x \Vert_\infty = \max\nolimits_i |x_i|$ and $\Vert K \Vert_\infty = \max\nolimits_i \sum_j |k_{ij}|$, $ \Vert x \Vert $ denotes the Euclidean norm and $ \Vert K \Vert = \sqrt{\lambda_{\max}(K^TK)} $. For given matrix $ P \in \mathbb{R}^{n\times n} > 0 $ and constant $ \rho > 0 $, $ \mathscr{B}(P,\rho) $ is defined as $ \mathscr{B}(P,\rho) = \{x\in \mathbb{R}^n : x^TPx \leq \rho\} $. Given matrix $ L \in \mathbb{R}^{m\times m} $, $ H \in \mathbb{R}^{m\times n} $, define $ \mathscr{L}(H) =\;\left\{x\;\in\;\mathbb{R}^n : \Vert Hx \Vert_\infty\; \leq \;1 \right\} $, define $\mathscr{D}(L,H)=\;\{x\in \mathbb{R}^{nm}: \max\nolimits_{i}\{\Vert l_i \Vert\} \max\nolimits_i\{ \Vert h_i \Vert \} \Vert x \Vert\; \leq\; 1 \}$, where $ l_i $ and $ h_i $ denote the i-th rows of L and H, respectively, and define $\phi_{H,L} = $ $ {\Vert L \Vert_\infty}/{\max\nolimits_i\{ \Vert h_i \Vert \}}$, $\phi_{H} = {\Vert H \Vert_\infty}/{\max\nolimits_i\{ \Vert h_i \Vert \}}$. $ \mathbb{E}\{ f(\chi) \} $ denotes the expectation of $ f(\chi) $, where χ is a random variable.
Considering the following MASs, the dynamics of the leader and the following agents are given by:
| {˙s(t)=As(t)+Bf(s(t))˙xi(t)=Axi(t)+Bf(xi(t))+ui(t) | (1) |
where $ s(t) \in \mathbb{R}^n $ denotes the state of leader, $ x_{i}(t) \in \mathbb{R}^{n} $ denotes the state of the i-th agent, $ i \in \mathscr{I}[1,m] $; A, $ B \in \mathbb{R}^{n\times n} $ denote system matrices; $ f\left(x_{i}(t)\right) $ denotes nonlinear function, defined as $ f\left(x_{i}(t)\right)=\left[f_{1}\left(x_{i}(t)\right), f_{2}\left(x_{i}(t)\right), \ldots, f_{n}\left(x_{i}(t)\right)\right]^{T} $; $ u_{i}(t) \in \mathbb{R}^n $ denotes the control protocol, which will be designed later.
Assumption 1: For the nonlinear function $ f(\cdot)=[ f_1(\cdot) $ $ f_2(\cdot)\;\;\cdots\;\;f_n(\cdot) ] : \mathbb{R}^n \to \mathbb{R}^n $ and $ z_1, z_2\in \mathbb{R}^n $, there exist non-negative constants $ r_{ij} $, $ i,j \in \mathscr{I}[1,n] $ satisfying the following inequality:
| |fi(z1)−fi(z2)|≤n∑j=1rij|z1,j−z2,j|. | (2) |
Denote $ R = [r_{ij}]_{n\times n} $ for later use.
Let $ \mathscr{G} = \{\mathscr{V}, \mathscr{E}, \mathscr{A}\} $ denote the communication graph of followers. $ \mathscr{V} = \{v_1,v_2,\ldots,v_m\} $ denotes the set of nodes; $ \mathscr{E} \subseteq \mathscr{V}\times \mathscr{V} $ denotes the set of the edges; $ \mathscr{A} = [a_{ij}]_{m\times m} \in \mathbb{R}^{m \times m} $ denotes the weight adjacency matrix, where $ a_{ij} \ge 0, i,j \in \mathscr{I}[1,m] $. The edges of $ \mathscr{G} $ can be described by $ (v_i,v_j) \in \mathscr{E} $, which means that node $ v_i $ can receive the information from node $ v_j $ and $ a_{ij} \neq 0 $ if and only if $ (v_i,v_j) \in \mathscr{E} $. This paper considers an undirected communication topology, that means $ (v_i,v_j) \in \mathscr{E} $ if only if $ (v_j,v_i) \in \mathscr{E} $. And according to the weighted adjacent matrix $ \mathscr{A} $, the Laplacian matrix $ L=[l_{ij}]_{m\times m} \in \mathbb{R}^{m \times m} $ can be described as follows:
| lij={m∑k=1aik,if i=j−aij,if i≠j. | (3) |
In this paper, the DoS attacks are considered. That means the communication between different nodes can be interrupted by malicious attacks. Define independent Bernoulli random variables $ \omega_{ij} $ and probability $ p_{ij} $ to denote the communication situation and the probability of normal communication between node $ v_i $ and $ v_j $, where $ (v_i,v_j) \in \mathscr{E} $.
| ωij={1,with probability pij0,with probability 1−pij. | (4) |
Denote $ v_0 $ as the leader agent, and $ \mathscr{E}_0 $ as the edges between leader and followers. Similarly, the communication condition between the leader and the followers can be described by $ \omega_{i0},p_{i0} $. It should be noted that not all agents have the capability to receive information directly from the leader.
For $ {(v_{i}, v_{j}) \in \mathscr{E}} $, suppose that $ {B_{i j}}=l_{i j} (\xi_{i} - \xi_{j})(\xi_{i} - \xi_{j})^{T} $, where $ i,j \in \mathscr{I}[1,m], j > i $; $ \xi_{i} \in \mathbb{R}^{m} $ denotes the vector with the i-th entry being 1 and all the other entries being 0. Then $ L_k $ denotes the Laplacian matrix when $ t=t_k $, and it can be represented as $ L_k=\sum_{i=1}^{m} \sum_{j =i+1}^{m} \omega_{i j} B_{i j} $. Let $ L_{e} $ be the expected value of Laplacian matrix $ L_k $, and it can be rewritten as
| Le=E{Lk}=E{m∑i=1m∑j=i+1ωijBij}=m∑i=1m∑j=i+1E{ωij}Bij=m∑i=1m∑j=i+1pijBij. | (5) |
Considering input saturation, this paper designs the following distributed impulsive controller:
| {ui(t)=∞∑k=1Sat(ˉui(t))δ(t−tk),k∈Z+ˉui(t)=K[n∑j=1aij(xj(t)−xi(t))+ci(xi(t)−s(t))] | (6) |
where $ \bar{u}_i(t) $ denotes the communication protocol, $ u_i(t) $ denotes the actual signal; $ \delta(\cdot) $ denotes the Dirac function; $ t_k $ denotes the impulsive instant that satisfies $ 0<t_0<t_1<\cdots< t_k< $ $ t_{k+1}<\cdots $, and $ t_k \to \infty $ as $ t\to + \infty $; K denotes the feedback matrix and $ c_i \ge 0 $ denotes the pinning gain. And $ c_i > 0 $ if and only if the leader is a neighbor of agent i, see Fig. 1. Define ${{C}} = {\rm{diag}}\left\{c_1,c_2,\ldots,c_n\right\}$ for later use. Similarly to the definition of $ L_k $, let $C_k = {\rm{diag}}\{\omega_{10}c_{1},\omega_{20}c_{2},\ldots,\omega_{m0}c_{m}\}$ represent the communication condition between the leader and the followers when $ t=t_k $.
In this paper, the saturation function is defined as $ Sat(\bar{u}_i) = [ sat(\bar{u}_{i,1})\;\;sat(\bar{u}_{i,2})\;\;\cdots\;\;sat(\bar{u}_{i,m}) ]^T $, where $ sat(\bar{u}_{i,j}) = sign(\bar{u}_{i,j})\times \min\{1,|\bar{u}_{i,j}|\} $.
Lemma 1 [29]: Given $ K, H \in \mathbb{R}^{m\times n} $, then for any $ x \in \mathscr{L}(H) $,
| Sat(Kx)=2m∑i=1ϑi(DiKx+D−iHx) | (7) |
where $ 0 \le \vartheta_i \le 1 $ and $ \sum_{i=1}^{2^m}\vartheta_i = 1 $; $ D_i $ belongs to the set of $ m \times m $ diaganol matrices whose diagonal elements are either 1 or 0, and $ D_i^- = I_m-D_i $, $ i = \mathscr{I}[1,2^m] $. Denote $ {N}(\vartheta) = \sum_{i=1}^{2^m}\vartheta_i\times (D_i K + D_i^- H) $ for later use.
Define $ e_i(t) = x_i(t) - s(t) $, combined with kronecker production, the system dynamic can be rewritten as follows:
| {˙e(t)=(Im⊗A)e(t)+(Im⊗B)g(e(t))Δe(tk)=Sat(ˉu(tk))e(t0)=e0 | (8) |
where $ e(t) = [ e_1^T(t)\;\;e_2^T(t)\;\;\cdots\;\;e_m^T(t) ]^T $, $ \Delta e(t_k) = e(t_k^+) - e(t_k^-) $, $ e(t_k^-) = \lim _{t\to t_k^-} e(t_k) $, $ e(t_k) = e(t_k^+) = \lim _{t\to t_k^+} e(t_k) $, $\bar{u} = [ \bar{u}_1^T(t) \bar{u}_2^T(t)\;\;\;\;\;\;\cdots\;\;\;\;\;\;\bar{u}_m^T(t) ]^T$; $g(e(t))\; =\; [ \bar{g}^T(e_1(t))\;\;\;\;\;\;\bar{g}^T(e_2(t))\;\;\;\;\;\;\cdots $ $\bar{g}^T(e_m(t)) ]^T $ and $ \bar{g}(e_i(t)) = f(e_i(t)+s(t)) - f(s(t)) $.
Definition 1 [30], [31]: Let $ e(t) = e(t, t_0, e_0) $ be the solution of the error system (8) through $ (t_0, e_0) $, then the set $ \{e_0 \in $ $\mathbb{R}^{nm}: \lim_{t \to \infty} e(t,t_0,e_0) = 0\} $ is called as the domain of attraction. And the system is said to achieve locally exponentially stable almost surely under DoS attacks, if there exist a set Ω and constants $ \alpha > 0 $, $ \zeta \geq 1 $ such that $ \mathbb{E}\{\Vert e(t)\Vert \} \leq $ $\zeta e^{-\alpha(t-t_0)} \Vert e_0 \Vert $, for all $ t > t_0, e_0\in \Omega $.
Definition 2: The multi-agent system (1) is said to achieve almost sure leader-follower consensus under DoS attacks if $ \mathbb{E}\{\Vert e(t) \Vert\} \to 0 $ when $ t \to \infty $.
Theorem 1: Given $ K, H \in \mathbb{R}^{n \times n} $, assume there exist positive definite matrix $ P \in \mathbb{R}^{n\times n} $, positive definite diagonal matrices $ S \in \mathbb{R}^{n\times n} $, $ D_0 \in \mathbb{R}^{n\times n} $, along with constants $ \tau_m, \alpha $, $ \mu > 0 $, such that $ \Vert D_0 \Vert_\infty $, $ \Vert D_{0,k} \Vert_\infty \leq \Vert L+C \Vert_\infty $, $ {\ln\mu}/{\tau_m} + \alpha \le 0 $, $ \mathscr{B}(I_m\otimes P, $ $\nu) \subset \mathscr{D}(L + C, H) $, and
| [PA+ATP−αP+RSRPBBTP−S]<0 | (9) |
| [−μIm⊗PIm⊗P−DT0⊗JTsPIm⊗P−D0⊗PJs−Im⊗P]<0 | (10) |
where $ J_s = D_s K + D_s^- H, s \in \mathscr{I}[1,2^n] $, $ D_{0,k} = L_k+C_k - D_0 $, $ \nu = \sigma \lambda_{\max}(P) \;\phi_{L+C}^2 \;(\phi_{H,K}\;+\;\phi_H)^2\;/\;{(e^{-\alpha \tau_{m}}\;-\;\mu)} $, $ \sigma \;=\; 3 \;+ \;2 \Vert L\;+ C \Vert_\infty^{-1} (\left\Vert K \right\Vert_\infty + \left\Vert H \right\Vert_\infty)^{-1} $. Then for $ e_0 \in $$ \mathscr{B}(I_m\otimes P, \bar{m}) $, where $ \bar{m} = \sigma \lambda_{\max}(P) \phi_{L+C}^2(\phi_H + \phi_{H,K})^2 $, the trajectory of system (8) under impulsive sequences $ \mathscr{M}(\tau_m) $, which denotes the class of impulsive sequences satisfying $ t_{k+1}-t_{k} \leq \tau_m $, can be bounded by $ \mathscr{B}(I_m\otimes P,\nu) $, i.e., for $ t >t_0 $, $ e(t) \in \mathscr{B}(I_m\otimes P,\nu) $.
Proof: It should be noticed that $ \mathscr{L}(H) $ can be described by the set $ \{ x | x^T H^T \xi_i\xi_i^T H x \leq 1\} $, $ i \in \mathscr{I}[1,n] $. Then, the set $ \mathscr{L}((L_k+ C_k)\otimes H ) $ can be described by $ \{ x | x^T((L_k+C_k)\xi_p\xi_p^T(L_k+C_k)\otimes H\xi_q\xi_q^TH ) x \leq 1\} $, $ p \in \mathscr{I}[1,m] $, $ q \in \mathscr{I}[1,n] $. Let $ l_{p,k} $ and $ c_{p,k} $ denote the p th rows of the matrices $ L_k $ and $ C_k $ respectively, $ \bar{l}_p $ and $ \bar{c}_p $ denote the p th rows of the matrices L and C respectively, and $ h_q $ denote the q th row of the matrix H. Then, $ \mathscr{L}\left((L_k+C_k)\otimes H \right) $ can be expressed by $ \{ x | x^T((l_{p,k} + c_{p,k})^T\times (l_{p,k} + c_{p,k})\otimes h_q^Th_q) x \leq 1\} $, $ p \in \mathscr{I}[1,m] $, $ q \in \mathscr{I}[1,n] $.
According to the attributes of $ L_k $ and $ C_k $, it holds that $ (\bar{l}_p+\bar{c}_p)(\bar{l}_p+\bar{c}_p)^T > (l_{p,k}+c_{p,k})(l_{p,k}+c_{p,k})^T $. For $ x\in \mathbb{R}^m $ the following inequality can be obtained:
| xT(lp,k+cp,k)T(lp,k+cp,k)x≤λmax((lp,k+cp,k)T(lp,k+cp,k))xTx≤(ˉlp+ˉcp)(ˉlp+ˉcp)TxTx≤maxp{‖ˉlp+ˉcp‖2}xTx. | (11) |
Thus, $\max\nolimits_p\{\Vert l_p+c_p \Vert^2\}\max\nolimits_q\{\Vert h_q \Vert^2\}I_m \otimes I_n - l_p^Tl_p\otimes h_q^Th_q > 0$ and $ \mathscr{D}(L+C,H) \subseteq \mathscr{L}\left((L_k+C_k)\otimes H \right) $. Combined with Lemma 1, the following system can be obtained:
| {˙e(t)=(Im⊗A)e(t)+(In⊗B)g(e(t)),t∈[tk−1,tk)Δe(t)=−∑sΘs(D0+D0,k)⊗Jse(t−),t=tk | (12) |
where $\Theta_s \;= \;{\rm{diag}}\{\vartheta_{s,1},\ldots,\vartheta_{s,m}\}$, $ \sum_{s=1}^{2^n}\vartheta_{s,i}\;=\;1, \;J_s\; =\; D_s K\; + $ $D_s^- H $, $ i \in \mathscr{I}[1,m] $, $ s \in \mathscr{I}[1,2^n] $; $ D_{0,k} = L_k + C_k - D_0 $.
Combining $ \Vert D_{0,k} \Vert_\infty \leq \Vert L + C \Vert_\infty $, $ \Vert D_0 \Vert_\infty \leq \Vert L + C \Vert_\infty $ and the definition of $\Theta_s = {\rm{diag}}\{\vartheta_{s,i}\}$, where $ \sum_s\vartheta_{s,i}=1 $, $ i \in \mathscr{I}[1,m] $, $ s \in \mathscr{I}[1,2^n] $, the following inequality holds:
| ‖∑sϑs,iJs‖∞≤∑s‖ϑs,iJs‖∞=∑sϑs,i‖Js‖∞≤max{‖K‖∞,‖H‖∞}. | (13) |
Choose the Lyapunov function as follows:
| V(e(t))=m∑i=1eTi(t)Pei(t)=eT(t)(Im⊗P)e(t). | (14) |
When $ t = t_k $,
| V(e(t+k))=eT(t−k)(Im⊗In−(D0,k+D0)∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘs(D0,k+D0)⊗Js)e(t−k)=eT(t−k)(Im⊗In−D0∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘsD0⊗Js)e(t−k)−2eT(t−k)(Im⊗In−D0∑sΘs⊗JTs)(Im⊗P)×(∑sΘsD0,k⊗Js)e(t−k)+eT(t−k)(D0,k∑sΘs⊗JTs)(Im⊗P)×(∑sΘsD0,k⊗Js)e(t−k)≤eT(t−k)(Im⊗In−DT0∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘsD0⊗Js)e(t−k)+λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×(2‖(∑sΘsD0⊗Js)e(t−k)‖+‖(∑sΘsD0,k⊗Js)e(t−k)‖)+2λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖‖e(t−k)‖. | (15) |
Furthermore, the processing of (15) is conducted in two situations for analysis.
When $\Vert ((D_0+D_{0,k})\otimes K) e(t_k^-) \Vert_\infty \leq 1$, the part of (15) can be derived as follows:
| λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×(2‖(∑sΘsD0⊗Js)e(t−k)‖+‖(∑sΘsD0,k⊗Js)e(t−k)‖)+2λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖‖e(t−k)‖=λmax(P)‖(D0,k⊗K)e(t−k)‖×(2‖e(t−k)‖+2‖(D0⊗K)e(t−k)‖+‖(D0,k⊗K)e(t−k)‖)≤λmax(P)‖L+C‖∞‖K‖∞‖e(t−k)‖2×(2+3‖L+C‖∞‖K‖∞). | (16) |
According to the definition of $ \mathscr{D}(L+C,H) $, it can be obtained that $\Vert e(t)\Vert \leq (\max\nolimits_i\{\Vert h_i \Vert\} \max\nolimits_i\{\Vert l_i +c_i \Vert\})^{-1}$, where $ l_i $, $ c_i $ and $ h_i $ denote the i-th rows of L, C and H, respectively. Then (16) can be rewritten as follows:
| 2λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×(‖(∑sΘsD0⊗Js)e(t−k)‖+‖e(t−k)‖)+λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×‖(∑sΘsD0,k⊗Js)e(t−k)‖≤ˉσ1λmax(P)ϕ2L+Cϕ2H,K | (17) |
where $ \bar{\sigma}_1 = 3 + 2 \Vert L+C \Vert_\infty^{-1} \Vert K \Vert_\infty^{-1} $.
When $\Vert ((D_0+D_{0,k})\otimes K) e(t_k^-) \Vert_\infty > 1$, due to (13), it can be deduced that $\Vert \sum_s\Theta_s \otimes J_s\Vert_\infty = \max\left\{ \Vert K \Vert_\infty,\Vert H\Vert_\infty \right\}$. Then the part of (15) can be derived as follows:
| 2λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×(‖(∑sΘsD0⊗Js)e(t−k)‖+‖e(t−k)‖)+λmax{P}‖(∑sΘsD0,k⊗Js)e(t−k)‖×‖(∑sΘsD0,k⊗Js)e(t−k)‖≤λmax(P)‖∑sΘs⊗Js‖∞‖L+C‖∞‖et−k‖2×(2+3‖L+C‖∞‖∑sΘs⊗Js‖∞)≤ˉσ2λmax(P)ϕ2L+Cmax{ϕ2H,K,ϕ2H} | (18) |
where $ \bar{\sigma}_2 = 3 + 2 \Vert L+C \Vert_\infty^{-1} /\max\{\Vert K \Vert_\infty, \Vert H \Vert_\infty\} $.
Due to (17) and (18), construct $ \sigma = 3 + 2\left\Vert L+C \right\Vert_\infty^{-1} (\Vert K \Vert_\infty + \Vert H \Vert_\infty)^{-1} $, combined with (15), the following inequality can be deduced:
| V(e(t+k))≤eT(t−k)(Im⊗In−DT0∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘsD0⊗Js)e(t−k)−μeT(t−k)(Im⊗P)e(t−k)+μeT(t−k)(Im⊗P)e(t−k)+ˉm | (19) |
where $ \bar{m} = \sigma \lambda_{\max}(P) \phi_{L+C}^2(\phi_H + \phi_{H,K})^2 $.
Construct matrix $ T(J_{s_1},J_{s_2}) $ as follows:
| T(Js1,Js2)=[−μIm⊗PIm⊗P−DT0⊗JTs1PIm⊗P−D0⊗PJs2−Im⊗P]. | (20) |
Then, (10) can be rewritten as $ T(J_{s},J_{s}) < 0 $, $ s \in \mathscr{I}[1,2^n] $, and it can deduce that $ T(J_{s_1},J_{s_2}) \prec 0 $, $ s_1, s_2 \in \mathscr{I}[1,2^n] $. Constructing $ S_{s_i} = I_2\otimes (\Theta_{s_i} \otimes I_n), i = 1,2 $, it can be obtained that $ \sum_{s_1,s_2}S_{s_1}T(J_{s_1},J_{s_2})S_{s_2}<0 $. Due to $ \sum_s \Theta_s =I_m $, the following inequality can be obtained:
| (Im⊗In−DT0∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘsD0⊗Js)−μ(Im⊗P)<0. | (21) |
Thus, according to (19), the following inequality holds:
| V(e(t+k))≤μeT(t−k)(Im⊗P)e(t−k)+ˉm=μV(e(t−k))+ˉm. | (22) |
Combined with (9), it can be obtained that
| {V(e(t))≤eα(t−tk−1)V(e(tk−1)),t∈[tk−1,tk)V(e(tk))≤μV(e(t−k))+ˉm,t=tk. | (23) |
When $ t \in [t_0,t_1) $, combined with $ V(e(t_0)) \leq 1 $, it holds that $ V(e(t)) \leq e^{\alpha \tau_{m}} $. Due to that $ 1- \bar{m} \leq \mu e^{\alpha \tau_{m}} \leq 1 $, $ V(e(t)) \leq \nu = \frac{\bar{m}}{e^{-\alpha \tau_m}-\mu} $ holds.
When $ t\in [t_k,t_{k+1}) $, the following inequality holds:
| V(e(t))≤(μV(e(t−k))+ˉm)eατm. | (24) |
Assume $ V(e(t_k^-)) \leq \nu $, then
| V(e(t))≤(μ +ˉm)eατm≤(ˉme−ατm−μ+ˉm)eατm≤ˉme−ατm−μ=ν. | (25) |
Combined with $ V(e(t_1^-)) \leq \nu $ and ${\ln\mu}/{\tau_m}+\alpha \leq 0$, it can prove that if $ e_0 \in \mathcal{B}(P,1) $, then $ e(t) \in \mathcal{B}(P,\nu), \forall t \ge t_0 $.
Furthermore,
| V(e(t))≤eα(t−tk)V(e(t+k))≤μeα(t−tk)V(e(t−k))+ˉmeα(t−tk)≤μeα(t−tk−1)V(e(t+k−1))+ˉmeα(t−tk)≤μ2eα(t−tk−1)V(e(t−k−1))+μˉmeα(t−tk−1)+ˉmeα(t−tk)⋮≤μkeα(t−t0)V(e(t+0))+μk−1ˉmeα(t−t1)+μk−2ˉmeα(t−t2)+⋯+ˉmeα(t−tk)≤ˉmeατm(ek(lnμ+ατm)+e(k−1)(lnμ+ατm)+⋯+elnμ+ατm+1)+μkeα(t−t0)(V(e(t0))−ˉm). | (26) |
Let $ r = \ln\mu + \alpha \tau_{m} $, then
| V(t)≤ˉmμere−r−1+e(k+1)rμ(V(e(t0))−ˉm). | (27) |
Considering $ e_0 $, it can be deduced as follows:
| V(t)≤{νer,V(e(t0))≤ˉmer(ν+V(t0)−ˉmμ),V(e(t0))>ˉm. | (28) |
Obviously, when $ V(e(t_0)) \leq \bar{m} $, it holds that $ V(e(t))\leq \nu $, i.e., for $ t >t_0 $, $ e(t) \in \mathscr{B}(I_m\otimes P,\nu) $.
Remark 1: Theorem 1 proposes a method to solve the input saturation problem for MASs. The conventional method employs the constraint $ \sum_s \theta_s = 1 $ to establish the linear matrix inequality (LMI) condition for single-agent systems. However, in the multi-agent system, this constraint is transformed into $ \sum_s \Theta_s = I_m $, and due to the nature of matrix multiplication, the conventional method cannot be directly applied. To address this challenge, Theorem 1 introduces the matrix function $ T(J_{s_1}, J_{s_2}) $ to resolve the input saturation problem in MASs. By transforming the constraint from $ \sum_s \theta_s = 1 $ to $ \sum_s \Theta_s = I_m $, the theorem adapts to the increased complexity of control in multi-agent systems with input saturation. This adjustment is crucial, as it allows for a more accurate representation of the system dynamics and constraints, thereby ensuring the overall effectiveness of the control strategy. Moreover, the boundary of the trajectory of MASs in the presence of input saturation and DoS attacks is estimated by utilizing the LMI constraint. And this’s important in real-world control application. By providing a clear estimation of the trajectory boundary, better control strategies can be designed, ensuring that the system can maintain its desired performance levels even under challenging conditions.
Theorem 2: Given $ K, H \in \mathbb{R}^{n \times n} $, assume there exist positive definite matrix $ P \in \mathbb{R}^{n\times n} $ and positive definite diagonal matrix $ S \in \mathbb{R}^{n\times n} $, along with positive constants α, $ \tau_m $, and μ, such that $ 1 \leq \mu\nu $, ${\ln\mu}/{\tau_m} + \alpha \le 0$, $ \mathscr{B}(I_m\otimes P,\nu) \subset \mathscr{D}\left(L + C, H \right) $ and
| [PA+ATP−αP+RSRPBBTP−S]<0 | (29) |
| [−μIm⊗P+Π0⊗JTsPJsIm⊗P−ΠTe⊗JTsPIm⊗P−Πe⊗PJs−Im⊗P]<0 | (30) |
where $ \Pi_0 = 2\sum_{i,j}(p_{ij}-p_{ij}^2)B_{ij} + Ce(C-C_e) $, $ \Pi_e =Le+Ce$;$Js = D_s K + D_s^- H $, $ s \in \mathscr{I}[1,2^n] $; $ \nu = \sigma \lambda_{\max}(P)\phi_{L+C}^2(\phi_{H,K}+\phi_H)^2 / ({e^{-\alpha \tau_{m}}-\mu}) $, $ \sigma = {3 + 2 \Vert L+C \Vert_\infty^{-1} (\left\Vert K \right\Vert_\infty + \left\Vert H \right\Vert_\infty)^{-1} } $. Then the system (8) is almost surely locally exponentially stable over the class $ \mathscr{M}[\tau_m] $, and bounded in $ \mathscr{B}(I_m\otimes P, \nu) $. And $ \mathscr{B}(I_m\otimes P,1) $ is contained in the domain of the attraction. Furthermore, for $ e_0 \in \mathscr{B}(I_m\otimes P,1) $, $ \mathbb{E}\{e^T(t)(I_m\otimes P)e(t)\} \le \mu^{-1} $ for $ t>t_0 $.
Proof: It is obviously that
| {‖Lk+Ck−Πe‖∞≤‖L+C‖∞‖Πe‖∞≤‖L+C‖∞. | (31) |
Due to the (30), the following inequality can be obtained:
| [−μIm⊗PIm⊗P−ΠTe⊗JTsPIm⊗P−Πe⊗PJs−Im⊗P]<0. | (32) |
Then, according to Theorem 1, it can be deduced that for $ e_0 \in \mathscr{B}(I_m\otimes P, \bar{m}) $, where $ \bar{m} = \sigma \lambda_{\max}(P) \phi_{L+C}^2(\phi_H + \phi_{H,K})^2 $, $ e(t) \in \mathscr{B}(I_m\otimes P,\nu) $ for $ t >t_0 $.
To demonstrate that for $ e_0 \in \mathscr{B}(I_m\otimes P,1) $, $ \mathbb{E}\{e^T(t)(I_m\otimes $ $ P)e(t)\} \le \mu^{-1}, \forall t\ge t_0 $, suppose that this assertion is false. Define $ \mathscr{C}(P,\rho)= \{x(t)\in \mathbb{R}^n : \mathbb{E}\{x^T(t)Px(t) \} \leq \rho \} $, then suppose there exist some instants $ t>t_{0} $ such that $ e(t) \notin \mathcal{C}(I_m\otimes P, \mu^{-1}) $.
Let $t^{*}= \inf \{t > t_{0}: e(t) \notin \mathscr{C}(I_m\otimes P,\mu^{-1})\}$. Since $ \mu^{-1}>1 $, $ t^{*}>t_{0} $ holds. When $ t \in\left[t_{0}, t^{*}\right) $, it holds that $ e(t) \in \mathscr{C}(I_m\otimes P, \mu^{-1}) $. If there exist some impulse instants on $ \left(t_{0}, t^{*}\right] $, assume that $ t_{0}<t_{1}<\cdots<t_{s} \leq t^{*} $.
Similarly to Theorem 1, it can be obtained that
| {˙e(t)=(Im⊗A)e(t)+(Im⊗B)g(e(t)),t∈[tk−1,tk)Δe(t)=−∑sΘs(Lk+Ck)⊗Jse(t−),t=tk. | (33) |
Choose the Lyapunov function as follows:
| V(e(t))=eT(t)(Im⊗P)e(t). | (34) |
When $ t = t_k $,
| E{V(e(t+k))}=E{eT(t−k)(Im⊗In−(LTk+CTk)∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘs(Lk+Ck)⊗Js)e(t−k)}=E{eT(t−k)(Im⊗P)e(t−k)}−2E{eT(t−k)(∑sΘs(Lk+Ck)⊗PJs)e(t−k)}+E{eT(t−k)((LTk+CTk)∑sΘs⊗JTs)(In⊗P)×(∑sΘs(Lk+Ck)⊗Js)e(t−k)}=E{eT(t−k)(E{(Lk+Ck)T∑sΘs∑sΘs(Lk+Ck)}⊗JTsPJs)e(t−k)+eT(t−k)(Im⊗P)e(t−k)}−2E{eT(t−k)(Im⊗P)(∑sΘs(Le+Ce)⊗Js)e(t−k)}. | (35) |
According to the definition of $ C_k $, $\mathbb{E}\{C_k^T C_k\} = \mathbb{E}\{{\rm{diag}}\{w_{10}^2c_{1}^2, w_{20}^2c_{2}^2,\ldots,w_{m0}^2c_{m}^2\}\} = C_eC$,
| E{CTk∑sΘs∑sΘsCk⊗JTsPJs}=CeC∑sΘs∑sΘs⊗JTsPJs. | (36) |
Then, it can be deduced that
| E{LTk∑sΘs∑sΘsLk⊗JTsPJs}=E{∑i∑jωijBTij∑sΘs∑sΘs∑p∑qωpqBpq⊗JTsPJs}=∑i∑j(pij−p2ij)BTij∑sΘs∑sΘsBij⊗JTsPJs+LTe∑sΘs∑sΘsLe⊗JTsPJs. | (37) |
| T(Js1,Js2)=[−μIm⊗P…ˉBTij⊗JTs1P…ˉC⊗JTs1PIm⊗P−(Le+Ce)T⊗JTs1P……OmnOmnOmnOmnˉBij⊗PJs2∗−Im⊗POmnOmnOmn…∗∗…OmnOmnˉC⊗PJs2∗∗∗−Im⊗POmnIm⊗P−(Le+Ce)⊗PJs2∗∗∗∗−Im⊗P] | (39) |
Furthermore,
| E{V(e(t+k))}=E{eT(t−k)(Im⊗In−(LTe+CTe)∑sΘs⊗JTs)(Im⊗P)×(Im⊗In−∑sΘs(Le+Ce)⊗Js)e(t−k)}+E{eT(t−k)(∑i,jˉBTij∑sΘs∑sΘsˉBij⊗JTsPJs)e(t−k)}+E{eT(t−k)(ˉC∑sΘs∑sΘsˉC⊗JTsPJs)e(t−k)}−E{eT(t−k)(μIm⊗P)e(t−k)−eT(t−k)(μIm⊗P)e(t−k)} | (38) |
where $ \bar{B}_{ij} = \sqrt{p_{ij}-p_{ij}^2}B_{ij} $, $ \bar{C}^2 = C_e(C-C_e) $.
Construct matrix $ T(J_{s_1},J_{s_2}) $ as (39) (see the top of this page). Then, (30) can be rewritten as $ T(J_{s},J_{s}) < 0 $, $ s \in \mathscr{I}[1, 2^n] $, and it can deduce that $ T(J_{s_1},J_{s_2}) \prec 0 $, $ s_1, s_2 \in \mathscr{I}[1,2^n] $. Construct $S_{s_i} = I_o\otimes (\Theta_{s_i} \otimes I_n), \; i = 1,2, o = 3+{\bar{o}}/{2}$, $ \bar{o} $ denotes the number of the edges in $ \mathscr{E} $. Then, it can be obtained that $ \sum_{s_1,s_2}S_{s_1}T(J_{s_1},J_{s_2})S_{s_2}<0 $. Combined with $ \sum_s \Theta_s =I_m $ and (38), the following inequality (40) can be obtained:
| E{V(e(t+k))}≤E{eT(t−k)(μIm⊗P)e(t−k)}=μE{V(e(t−k))}. | (40) |
Due to the definition of $ t^{*} $, it can be see that $ \mathbb{E}\{V(e(t^*))\} \ge \mu^{-1} $. Thus, $ t^* $ is not an impulsive instant, otherwise $ \mathbb{E}\{V(e(t^*))\}\;\;\le\;\; \mu \mathbb{E}\;\{V\;(e\;(t^{*-}))\} \;\;< \;\;1 $ which conflicts with $ \mathbb{E}\{V(e(t^*))\} > \mu^{-1} $. Then, it can be derived that $ \mathbb{E}\{V(e(t^*))\} = \mu^{-1} $.
When $ t \in \left[t_{k-1},t_k\right) $, taking the derivative of $ V(e(t)) $, the following inequality can be obtained:
| ˙V(e(t))≤eT(t)(Im⊗(PA+ATP))e(t)+2eT(t)(Im⊗PB)g(e(t)). | (41) |
Due to the Lipschitz condition, it can be deduced that
| gT(e(t))(Im⊗S)g(e(t))≤eT(t)(Im⊗RTSR)e(t). | (42) |
Then,
| ˙V(e(t))≤eT(t)(Im⊗(PA+ATP))e(t)+eT(t)(PBS−1BTP+RTSR)e(t). | (43) |
Due to (29), the following inequality can be obtained:
| ˙V(e(t))<αV(e(t)). | (44) |
Thus there exists a constant $ \delta \in \left(0,1 \right) $ such that $ \dot{V}(e(t)) \leq \delta \alpha V(e(t)) $, which leads to
| V(e(t))≤eδα(t−tk−1)V(e(tk−1)),∀t∈[tk−1,tk). | (45) |
Combined with (40), (45), and $N(t_0, t) \geq ({t-t_0})/{\tau_m} - 1$, then
| E{V(e(t))}≤μN(t0,t)eδα(t−t0)V(e(t0))≤e−N(t0,t)ατmeδα(t−t0)V(e(t0))≤μ−1e−(α−δα)(t−t0)V(e(t0)),∀t∈[t0,t∗]. | (46) |
where $ N(t_0, t) $ represents the number of the impulse occurring on $ [t_0,t) $.
Due to $ x_0 \in \mathscr{B}(I_m\otimes P,1) $ and $ \delta < 1 $, $ \mathbb{E}\{V(e(t^*))\} < \mu^{-1} $. Obviously, it contradicts with $ \mathbb{E}\{V(e(t^*))\} = \mu^{-1} $. Hence, it can prove that $ e(t) \in \mathscr{C}(I_m\otimes P,\mu^{-1}), \forall t \ge t_0 $.
Furthermore, it can be summarized that
| {V(e(t))<eα(t−tk−1)V(e(tk−1)),t∈[tk−1,tk)E{V(e(tk))}<μE{V(e(t−k))},t=tk. | (47) |
Then,
| E{V(e(t))}≤eα(t−tk)E{V(e(tk))}≤μeα(t−tk)E{V(e(t−k))}≤μeα(t−tk−1)E{V(e(tk−1))}⋮≤μN(t0,t)eα(t−t0)V(e(t0)). | (48) |
Due to $\mu < 1, {\ln\mu}/{\tau_m} + \alpha \le 0$, the following inequality can be deduced:
| E{V(e(t))}≤μ−1e−(α−δα)(t−t0)V(e(t0)) | (49) |
i.e.,
| E{‖e(t)‖}≤√λmax(P)μλmin(P)e−α−δα2(t−t0)‖e0‖. | (50) |
Therefore, the error system (33) is said to be almost surely locally exponentially stable.
Remark 2: Combined with the constraints established in Theorem 1, Theorem 2 provides a proof of almost sure local exponential stability for the multi-agent system (8), along with an estimation of the domain of attraction. By taking into account the impact of unconstrained DoS attacks, Theorem 2 offers a more non-conservative boundary for the trajectory of MASs. In the proof of Theorem 2, it should be noted that $ \mu \nu $ imposes constraints on the boundary of $ \mathbb{E}\{\Vert e(t) \Vert\} $: if $ \mu \nu \geq \bar{m} $, then for $ e_0 \in \mathscr{B}(I_m\otimes P, \bar{m}) $, $ e(t) \in \mathscr{C}(I_m\otimes P, \frac{\bar{m}}{\mu}) $, $ t>t_0 $. Conversely, if $ \mu \nu < \bar{m} $, then for $ e_0 \in \mathscr{B}(I_m\otimes P, \nu \mu) $, $ e(t) \in \mathscr{B}(I_m\otimes P, \nu) $, $ t>t_0 $. Based on the definitions of ν and $ \bar{m} $, the comparison between $ \mu\nu $ and $ \bar{m} $ can be simplified to determining whether $ \frac{\mu}{e^{-\alpha \tau_m}-\mu} $ is greater than $ 1 $. It should be noted that in the process of designing impulsive signal, a larger $ \tau_m $ implies a lower communication frequency and fewer communication resources. Consequently, $ \frac{\mu}{e^{-\alpha \tau_m}-\mu} $ is often significantly larger than 1. This indicates that ${\bar{m}}/{\mu}$ is much smaller than ν. Ultimately, it demonstrates $ \mathbb{E}\{\Vert e(t)\Vert\} $ has a significantly smaller boundary than $ \Vert e(t)\Vert $. As a result, it provides a more accurate representation of the impact of unconstrained DoS attacks.
Remark 3:Theorems 1 and 2 analyze conservative and non-conservative upper bounds for MASs under DoS attacks respectively. Theorem 1 guarantees that DoS attacks have limited interference with the system under the designed control protocol. Based on Theorem 1, Theorem 2 further analyzes the possible non-conservative upper bound of the system. In Remark 2, the difference between conservative and non-conservative upper bounds is analyzed and the value of non-conservative upper bound is illustrated.
In the control protocol design, the domain of attraction characterizes the extent of the stability of system under the designed controller. In Theorem 2, the domain of attraction is constrained by input saturation that the error trajectory must be in $ \mathscr{L}\left((L_k+C_k) \otimes H\right) $. Obviously, the choice of H is closely related to the domain of attraction. However, the choice of H and K is deeply coupled and it makes the control gain design difficult. Thus, how to design the K and H to maximize the domain of attraction is a critical issue and this part gives a method to choose the K and H.
As highlighted in [29], the bounded and convex shape reference set $ \xi_{\mathbb{R}} $ in $ \mathbb{R}^{nm} $ can characterize the size of $ \mathscr{B}(Im\otimes P,1) $. Suppose $ \xi_{\mathbb{R}} $ denotes a polyhedron represented as $ \xi_{\mathbb{R}} = cov\{\xi_1, \ldots, \xi_p\} $, where $ \xi_1, \ldots, \xi_p $ are predefined points. Following that, to maximize the ellipsoid $ \mathscr{B}(I_m \otimes P,1) $, one seeks to maximize γ such that $ \gamma \xi_{\mathbb{R}} \subset \mathscr{B}(I_m \otimes P, 1) $, where $ \gamma > 1 $. For the sake of simplicity, let $ \mathscr{M}^* = \mathscr{M}[\tau_m] $ and formulate a convex optimization problem to estimate the maximum γ as follows:
| maxK,H,P,S,α,μ,M⋆γs.t.(a)γξR⊂B(Im⊗P,1)(b)(29) in Theorem 2(c)(30) in Theorem 2(d)lnμτm+α≤0(e)B(Im⊗P,μ−1)⊂D((L+C)⊗H). | (51) |
To simplify the calculation, the constraints (a) and (e) can be transformed into matrix form as follows:
| {(a1)[−1γξTRγξR−Im⊗P−1]<0(e1)[−PϱHTˉξiϱˉξTiH−μ]<0 | (52) |
where $ \bar{\xi}_i \in \mathbb{R}^{n} $, $ i \in \mathscr{I}[1,n] $, denotes the vector with the i-th entry being 1 and all the other entries being 0; $ \{e_0 \in $ $ \max\nolimits_i\{\Vert l_i + c_i \Vert\}$, where $ l_i $ and $ c_i $ denote the i-th rows of L and C.
Let $\lambda = {1}/{\gamma^2}$, $ U = P^{-1} $, $ T=S^{-1} $, $ Y=KU $, $ Z=HU $, and $ F^TF = B_0+C_0 $, the convex optimization problem can be reformulated as the subsequent optimization problem
| minU,T,Y,Z,τmλs.t.(a2)[−λξTRξR−Im⊗U]<0(b1)[AU+UAT+BTBT−αUURRU−T]<0(c1)[−μIm⊗UFT⊗VTiIm⊗U−ΠTe⊗VTiF⊗Vi−Im⊗UOIm⊗U−Πe⊗ViO−Im⊗U]<0(d)lnμτ+α≤0(e2)[−UϱZTˉξiϱˉξTiZ−eατmN0]<0 | (53) |
where $ V_i = D_iY+D_i^-Z $, $ i \in \mathscr{I}[1,2^n] $.
To illustrate how to use the above optimization problem to estimate the attraction domain, the design and operation of the algorithm are described below.
Step 1: Referencing (29), determine the smallest feasible positive constant $\alpha $.
Step 2: Let $\alpha $ calculated in Step 1 be denoted as $ \alpha^* $. The connection between $\mu $ and $ \tau_m $ can be derived in (d) of (51). Considering constraints (c1) of (53) and (e2) of (53), it should be noted that a feasible solution for given $ \mu < e^{-\alpha ^* \tau_m} $ remains feasible when $ \mu = e^{-\alpha^* \tau_m} $. Thus, the optimization problem can be simplified as follows:
| minU,T,Y,Z,τmλs.t.(a2)and(b2)[AU+UAT+BTBT−α∗UURRU−T]<0(c2)[−e−α∗τIm⊗UFT⊗VTIm⊗U−ΠTe⊗VTF⊗V−Im⊗UOIm⊗U−Πe⊗VO−Im⊗U]<0(e2)[−UϱZTˉξiϱˉξTiZ−eα∗τmN0]<0. | (54) |
Step 3: Adjust the constant $ \tau_m $ and the optimization value $\lambda $ to obtain the desired control effect. It should be noticed that $ \tau_m $ describes the frequency of the communication between agents and $\lambda $ describes the size of the domain of attraction, that a larger value of $ \tau_m $ means the situation of low-frequency communication and it leads to the reduction of the domain of attraction; A less value of $ \tau_m $ describes the situation of high-frequency communication that reduces the constraint on the domain of attraction.
Through the above steps, the optimization problem can be resolved and the optimized values $\lambda $ and $ \tau_m $ can be obtained using the solution $ U_0, Z_0, T_0 $ and $ Y_0 $ where $ \lambda = \gamma ^{-0.5} $, impulsive gain $ K = Y_0U_0^{-1} $, and auxiliary matrix $ H=Z_0U_0^{-1} $. Then the maximized estimate of the domain of attraction is obtained under impulse sequence set $ \mathscr{M}^* $.
In this section, a multi-agent system is considered, which is composed of five following agents and the communication topology graph of the network is shown in Fig. 2. And the corresponding Laplacian matrix is shown as follows:

| L=[0.68−0.27−0.29−0.120−0.270.7−0.320−0.11−0.29−0.320.92−0.310−0.120−0.310.97−0.540−0.110−0.540.65] | (55) |
| PL=[00.350.960.1600.3500.9100.830.960.9100.1000.1600.1000.9400.8300.940] | (56) |
where L denotes the communication topology without DoS attacks, and $ \mathcal{P}_L=[p_{ij}]_{5\times 5} $ denotes the probability of normal communication. Due to L and $ \mathcal{P}_L $, $ L_k $ and $ L_e $ can be obtained. C is set as ${\rm{diag}}\{0,0.74,0.53,0,0.88\}$ and the corresponding $ \mathcal{P}_C $ is set as ${\rm{diag}}\{0,0.84,0.81,0,0.73\}$.
The dynamic model for the leader and followers is the classical Chua’s circuit model, given by
| ˙x(t)=Ax(t)+Bf(x(t)) | (57) |
where $ x(t) = [x1(t)x2(t)x3(t)]^T $, $ B = -(a-b)\alpha I $ and $A = $ $ \left[−α−αbα01−110−β0\right],\;f = \left[0.5(|x1+1|−|x1−1|)00\right] $.
In this paper, the parameters are set as $ a = -1.24905 $, $ \alpha = 9.2156 $, $ b=-0.75735 $, $ \beta=15.9946 $, and the initial state is set as $ x_0 = [ 0.15\;\;0.1\;\;0.2 ]^T $.
The dynamic of the error system can be described by
| {˙ei(t)=Aei(t)+Bˉg(ei(t)),t≠tkΔei(t)=K[n∑j=1aij(ej(t)−ei(t))+ciei(t)],t=tk. | (58) |
And the related definitions refer to (8).
Taking impulsive saturation and DoS attacks into account and applying Kronecker production, the multi-agent system can be transformed into the following form:
| {˙e(t)=(I⊗A)e(t)+(I⊗B)g(e(t)),t≠tkΔe(t)=Sat[((Lk+Ck)⊗K)e(t)],t=tk. | (59) |
According to the analysis of the domain of attraction, set $ \xi_1 = \left[1,1,1,1,1\right]^T \otimes \left[1,1.2,1.3\right]^T $. Then, with $ \xi_{\mathbb{R}} = \{\xi_1,-\xi_1\} $, a feasible solution can be obtained that $ \alpha^* = 9.4 $, $ \tau_0 = 0.01 $, $ \lambda = 1.035 $ and the feedback gain
| K=[0.7992−0.00080.0099−0.03800.8079−0.05160.0096−0.00170.7913]. |
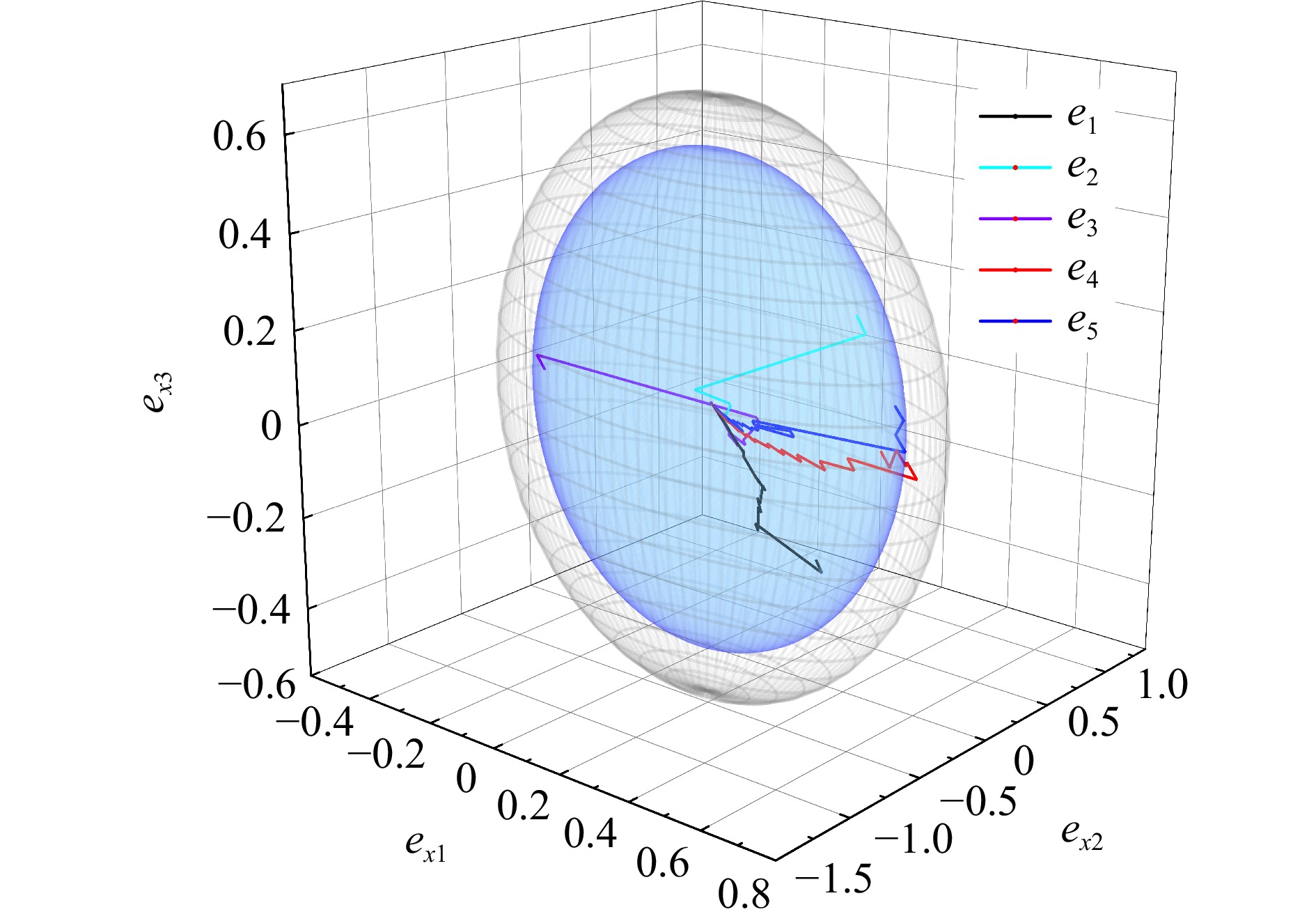
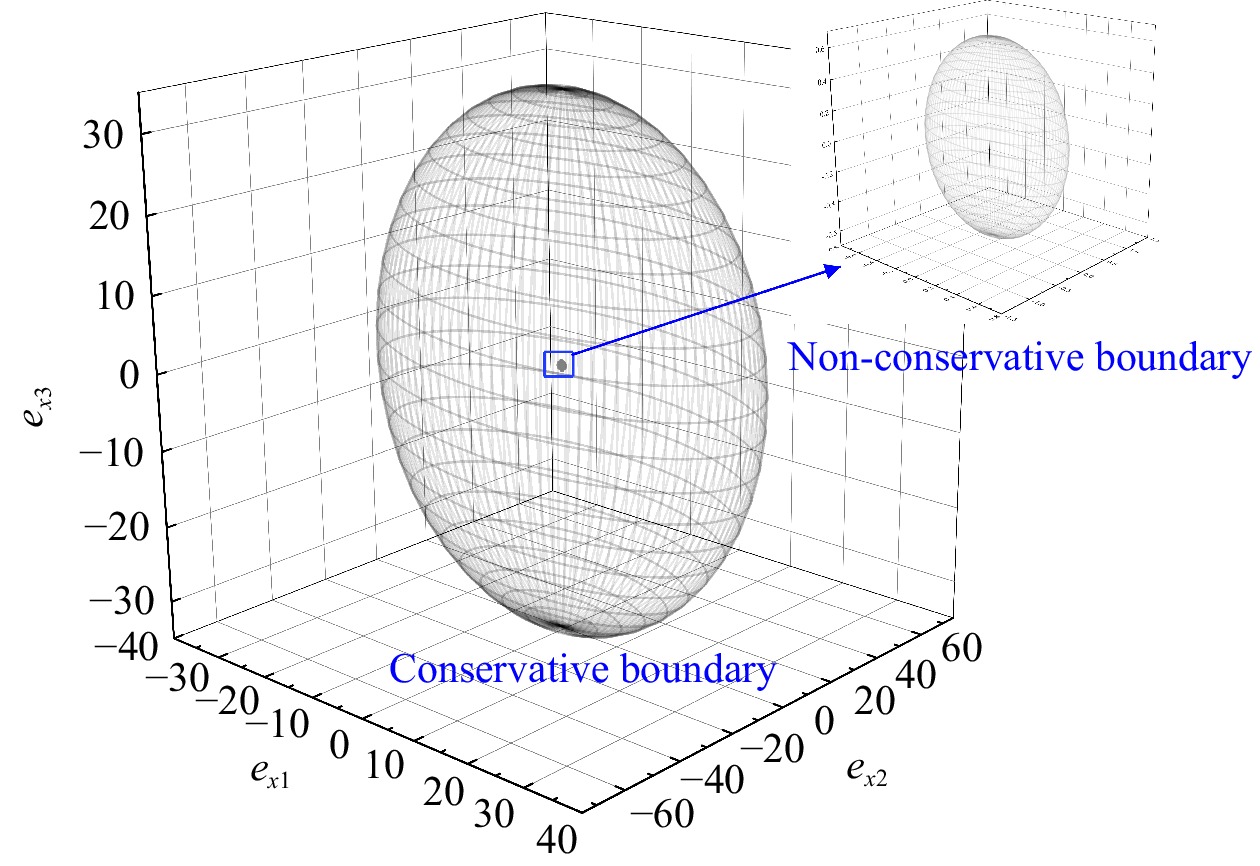
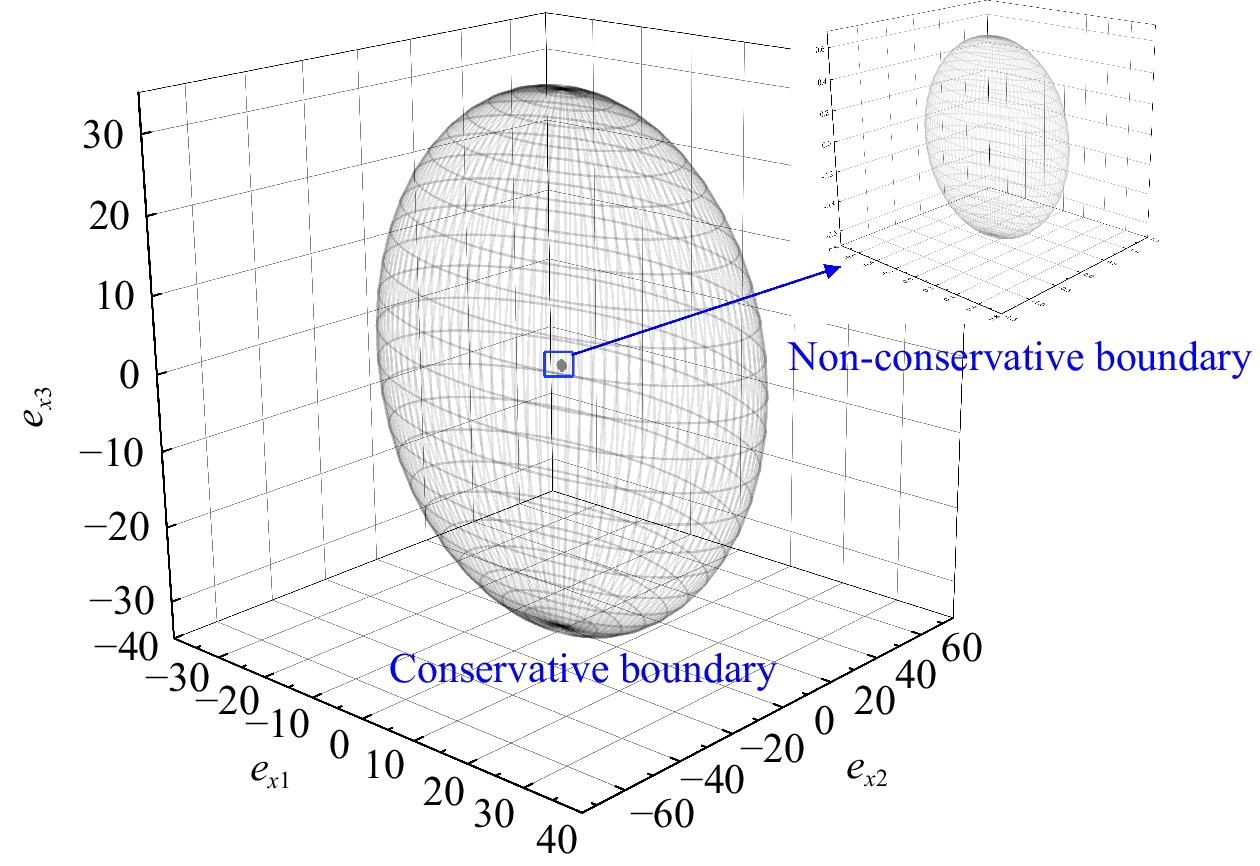
And the estimation of the domain of attraction is illustrated in Fig. 3. The blue ellipsoid denotes the domain of attraction of the system and the gray network denotes the boundary of $ \mathbb{E}\{\Vert e(t) \Vert\} $ in a special case, because for the multi-agent system, the system error as high dimensional vector belongs to $ \mathbb{R}^{15\times 1} $ is hard to express in the three-dimensional figure. Thus in Fig. 3 only the domains of attraction of the five single agents are considered and the relationship between the domains of attraction of the different agents is not taken into account. (In fact, the domain of attraction of several other intelligences becomes larger when the initial state of one intelligence lies within the neighborhood of the zero point) Through Fig. 3, it can be seen that the non-conservative boundary better constrains the system trajectory under unconstrained DoS attacks. Furthermore, the conservative and non-conservative boundaries of the multi-agent system are shown in Fig. 4. As conclusion in Remark 2, the value of $ \frac{\mu}{e^{-\alpha \tau}-\mu} $ decides the relation of the two boundaries. And the value is calculated that $ \frac{\mu}{e^{-\alpha \tau}-\mu} = 53.17 $ that means the conservative boundary is almost 53 times larger than the non-conservative one when system initial states are the same.

According to Theorem 2, the system (59) is said to almost surely locally exponentially stable over the class $ \mathscr{M}[0.01] $ when $ e_0 \in \mathscr{B}(I_5\otimes P,1) $.
In simulation, the initial errors are set as follows:
| e1=[0.250.18−0.32]T,e2=[0.320.260.22]Te3=[−0.43−0.210.01]T,e4=[0.410.22−0.05]Te5=[0.460.200.06]T |
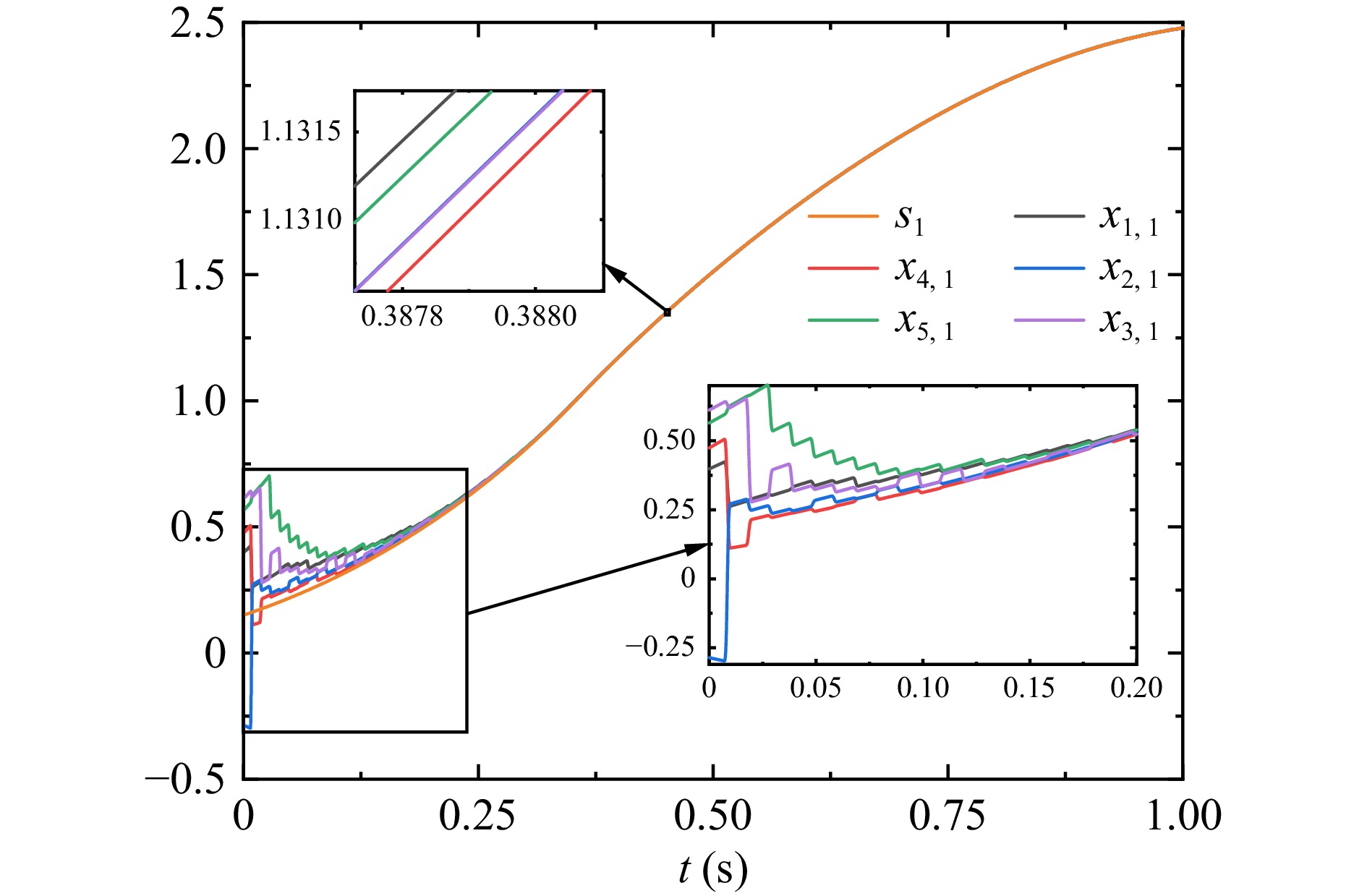
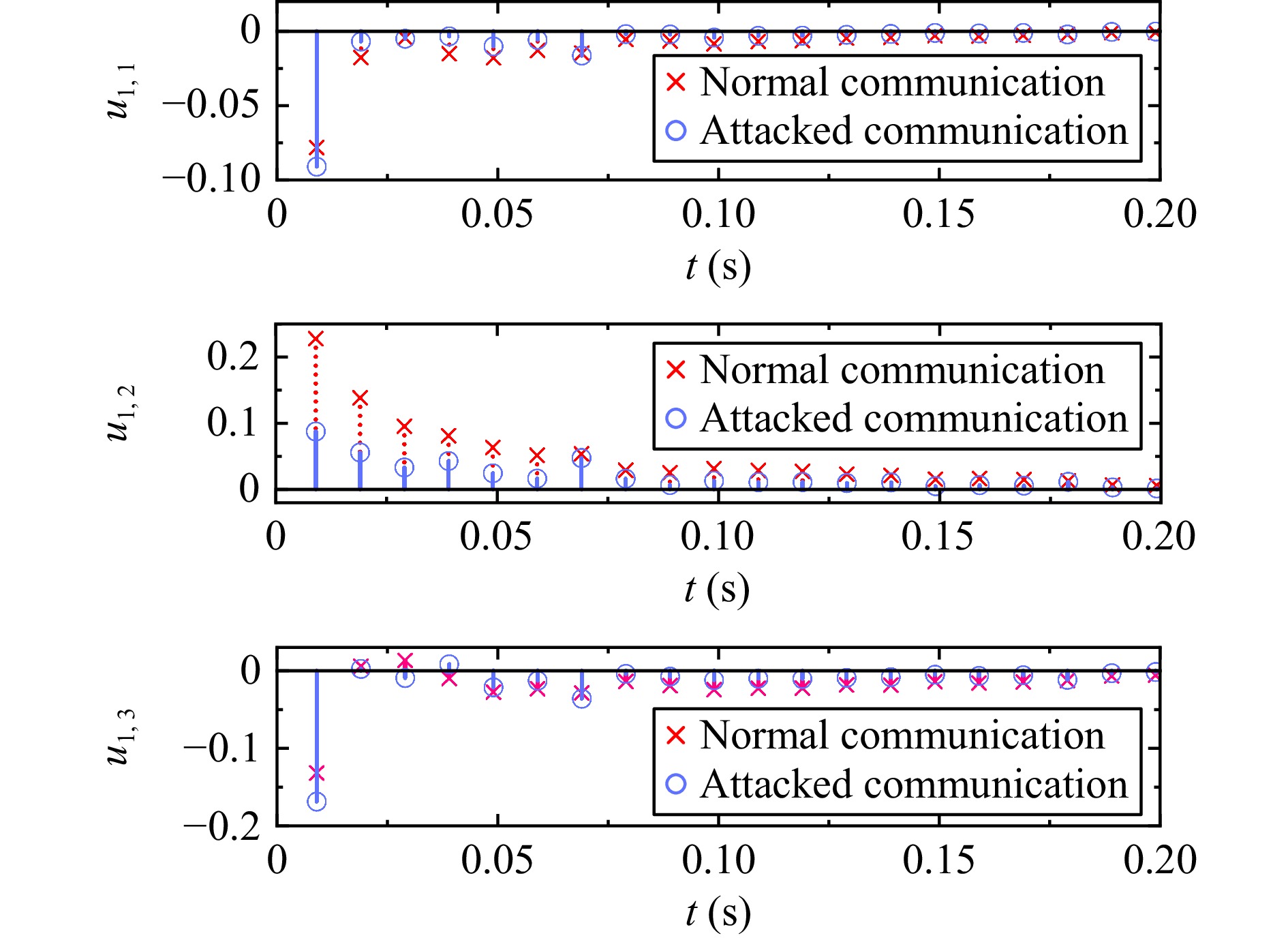
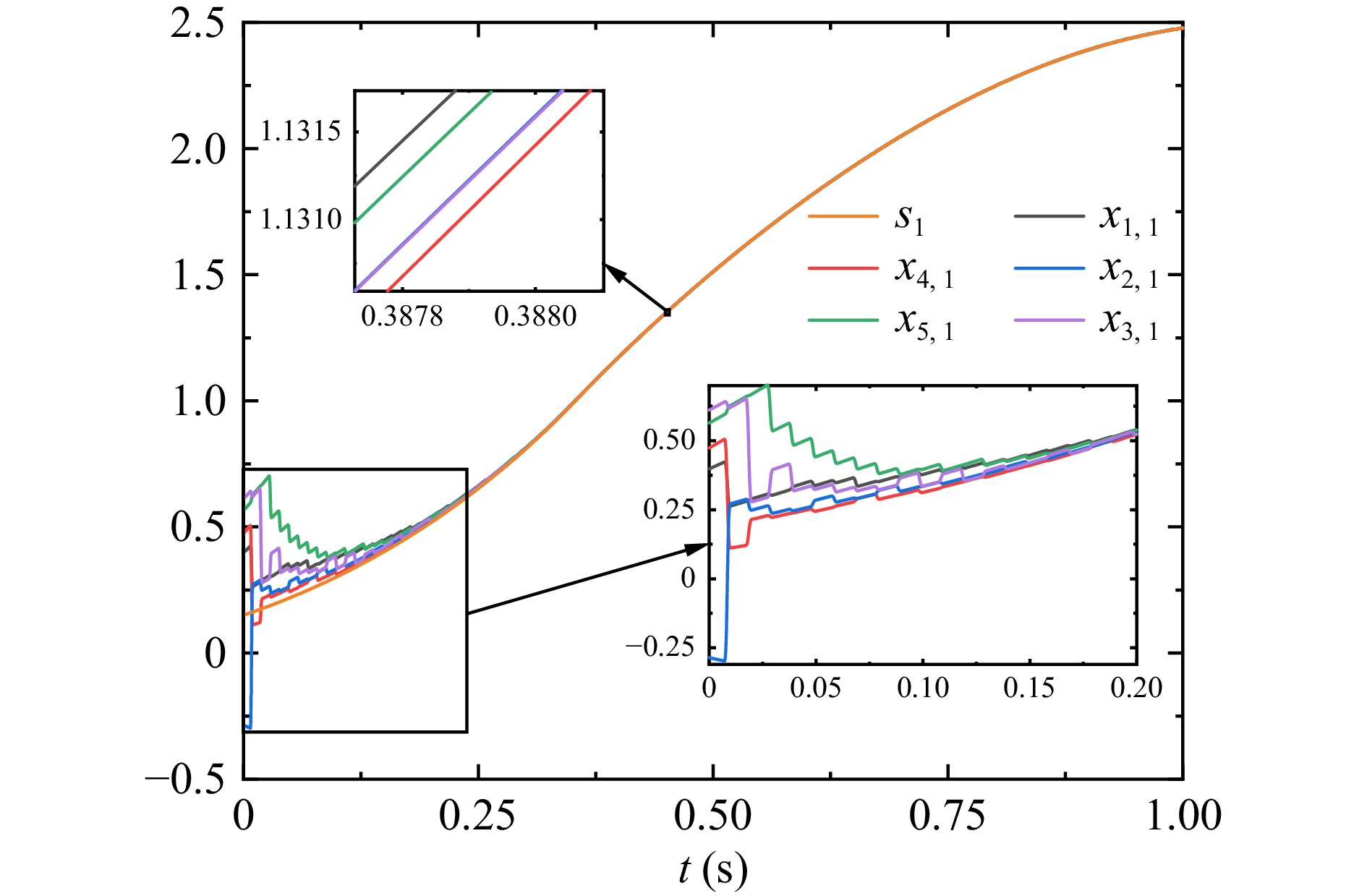
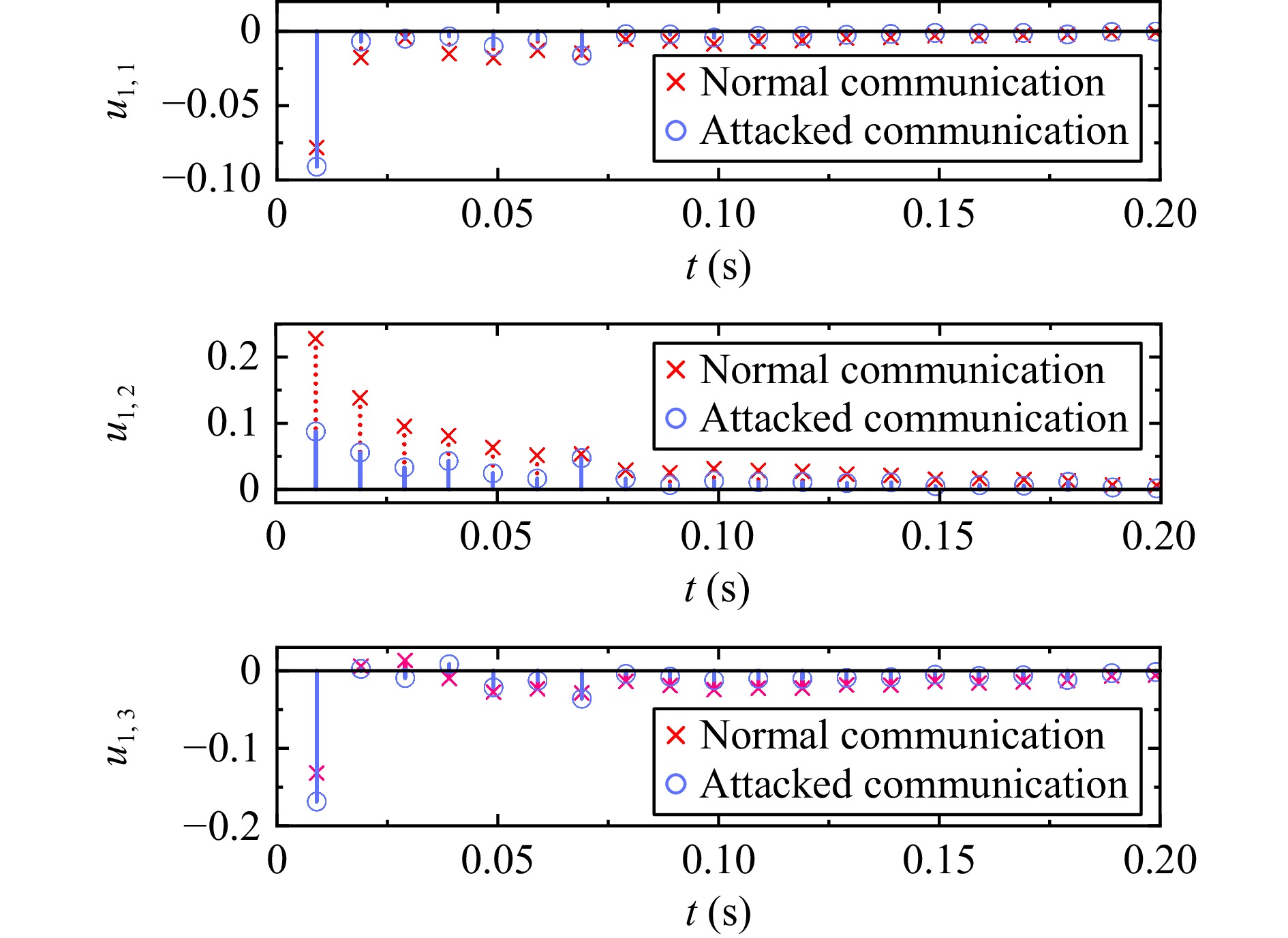
and the impulse time sequence is set as: $ t_{k}=0.01\;{\rm{k}} $. Fig. 5 illustrates the multi-agent system’s trajectory with two sub-figures showing the convergence speed and convergence accuracy respectively. To clarify the DoS attacks effect on impulsive control, Fig. 6 illustrates the impulsive control signals with normal communication and with attacked communication.
This paper investigates the secure impulsive consensus of MASs subject to input saturation and DoS attacks. It proves the almost sure local exponential stability of MASs under DoS attacks and resolves the input saturation problem for impulsive sequences in the multi-agent system. Additionally, it analyzes the domain of attraction for MASs, estimating both conservative and non-conservative trajectory boundaries. Through this paper, the multi-agent systems under cyber-attacks can achieve impulsive consensus and the effects of the cyber-attacks can be kept under control. The coupling of DoS attacks and input saturation in multi-agent systems is studied in this paper, and the coupling of input saturation and deception attacks remains to be studied.
| [1] |
S. D. J. McArthur, E. M. Davidson, V. M. Catterson, A. L. Dimeas, N. D. Hatziargyriou, F. Ponci, and T. Funabashi, “Multi-agent systems for power engineering applications—Part I: Concepts, approaches, and technical challenges,” IEEE Trans. Power Syst., vol. 22, no. 4, pp. 1743–1752, 2007. doi: 10.1109/TPWRS.2007.908471
|
| [2] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–614, 2022. doi: 10.1109/JAS.2022.105410
|
| [3] |
C. Liu, B. Jiang, X. Wang, H. Yang, and S. Xie, “Distributed faulttolerant consensus tracking of multi-agent systems under cyber-attacks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1037–1048, 2022. doi: 10.1109/JAS.2022.105419
|
| [4] |
M. S. Mahmoud and G. D. Khan, “LMI consensus condition for discretetime multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 509–513, 2018. doi: 10.1109/JAS.2016.7510016
|
| [5] |
H. Du, G. Wen, D. Wu, Y. Cheng, and J. Lv, “Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems,” Automatica, vol. 113, p. 108797, 2020. doi: 10.1016/j.automatica.2019.108797
|
| [6] |
A. Amirkhani and A. H. Barshooi, “Consensus in multi-agent systems: A review,” Artificial Intelligence Review, vol. 55, no. 5, pp. 3897–3935, Nov. 2021.
|
| [7] |
J. Farwell and R. Rohozinski, “Stuxnet and the future of cyber war,” Survival, vol. 53, pp. 23–40, 2011.
|
| [8] |
E. Iasiello, “Cyber attack: A dull tool to shape foreign policy,” in Proc. 5th Int. Conf. Cyber Conflict, 2013, pp. 1–18.
|
| [9] |
J. Slay and M. Miller, “Lessons learned from the Maroochy water breach,” Critical Infrastructure Protection, E. Goetz and S. Shenoi, Eds. Boston, MA: Springer US, 2008, pp. 73–82.
|
| [10] |
A.-Y. Lu and G.-H. Yang, “Distributed consensus control for multi-agent systems under denial-of-service,” Information Sciences, vol. 439–440, pp. 95–107, 2018. doi: 10.1016/j.ins.2018.02.008
|
| [11] |
J. Liu, T. Yin, D. Yue, H. R. Karimi, and J. Cao, “Event-based secure leader-following consensus control for multiagent systems with multiple cyber attacks,” IEEE Trans. Cybernetics, vol. 51, no. 1, pp. 162–173, 2021. doi: 10.1109/TCYB.2020.2970556
|
| [12] |
L. An and G.-H. Yang, “Distributed secure state estimation for cyber-physical systems under sensor attacks,” Automatica, vol. 107, pp. 526–538, 2019. doi: 10.1016/j.automatica.2019.06.019
|
| [13] |
G. Chen, G. Du, J. Xia, X. Xie, and Z. Wang, “Aperiodic sampled-data h∞ control of vehicle active suspension system: An uncertain discretetime model approach,” IEEE Trans. Industrial Informatics, vol. 20, no. 4, pp. 6739–6750, 2024. doi: 10.1109/TII.2024.3353856
|
| [14] |
G. Narayanan, M. S. Ali, H. Alsulami, G. Stamov, I. Stamova, and B. Ahmad, “Impulsive security control for fractional-order delayed multi-agent systems with uncertain parameters and switching topology under DoS attack,” Information Sciences, vol. 618, pp. 169–190, 2022. doi: 10.1016/j.ins.2022.10.123
|
| [15] |
G. Chen, J. Xia, J. H. Park, H. Shen, and G. Zhuang, “Sampleddata synchronization of stochastic markovian jump neural networks with time-varying delay,” IEEE Trans. Neural Networks and Learning Systems, vol. 33, no. 8, pp. 3829–3841, 2022. doi: 10.1109/TNNLS.2021.3054615
|
| [16] |
L. Feng, W. Zhang, and Z. Wu, “Stabilization of random nonlinear systems subject to deception attacks,” Int. J. Robust and Nonlinear Control, vol. 32, no. 4, pp. 2233–2250, 2022. doi: 10.1002/rnc.5944
|
| [17] |
W. He, Z. Mo, Q.-L. Han, and F. Qian, “Secure impulsive synchronization in lipschitz-type multi-agent systems subject to deception attacks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1326–1334, 2020. doi: 10.1109/JAS.2020.1003297
|
| [18] |
J. Zhang, D. Yang, H. Zhang, and H. Su, “Adaptive secure practical fault-tolerant output regulation of multiagent systems with DoS attacks by asynchronous communications,” IEEE Trans. Network Science and Engineering, vol. 10, no. 6, pp. 4046–4055, 2023.
|
| [19] |
D. Lin, W. Lan, and M. Li, “Composite nonlinear feedback control for linear singular systems with input saturation,” Systems and Control Letters, vol. 60, no. 10, pp. 825–831, 2011.
|
| [20] |
Y.-F. Gao, X.-M. Sun, C. Wen, and W. Wang, “Adaptive tracking control for a class of stochastic uncertain nonlinear systems with input saturation,” IEEE Trans. Autom. Control, vol. 62, no. 5, pp. 2498–2504, 2017. doi: 10.1109/TAC.2016.2600340
|
| [21] |
W. Lin, “Input saturation and global stabilization of nonlinear systems via state and output feedback,” IEEE Trans. Autom. Control, vol. 40, no. 4, pp. 776–782, 1995. doi: 10.1109/9.376089
|
| [22] |
Z. Yang, S. Li, D. Yu, and C. P. Chen, “Bls-based formation control for nonlinear multi-agent systems with actuator fault and input saturation,” Nonlinear Dynamics, vol. 109, no. 4, pp. 2657–2673, 2022. doi: 10.1007/s11071-022-07505-4
|
| [23] |
L. Zhang, W.-W. Che, C. Deng, and Z.-G. Wu, “Prescribed performance fuzzy resilient control for nonlinear systems under DoS attacks,” IEEE Trans. Systems, Man, and Cybernetics: Systems, vol. 53, no. 5, pp. 3104–3116, 2023. doi: 10.1109/TSMC.2022.3221371
|
| [24] |
X. Li and C. Zhu, “Saturated impulsive control of nonlinear systems with applications,” Automatica, vol. 142, p. 110375, 2022. doi: 10.1016/j.automatica.2022.110375
|
| [25] |
T. Yang, Z. Meng, D. V. Dimarogonas, and K. H. Johansson, “Global consensus for discrete-time multi-agent systems with input saturation constraints,” Automatica, vol. 50, no. 2, pp. 499–506, 2014. doi: 10.1016/j.automatica.2013.11.008
|
| [26] |
X. Guo, Q. Li, L. Ji, and J. Wang, “Secured impulsive control for directed networks under denial-of-service attacks,” Systems and Control Letters, vol. 173, p. 105463, 2023.
|
| [27] |
C.-C. Hua, X. You, and X.-P. Guan, “Leader-following consensus for a class of high-order nonlinear multi-agent systems,” Automatica, vol. 73, pp. 138–144, 2016. doi: 10.1016/j.automatica.2016.06.025
|
| [28] |
M. Meng, G. Xiao, and B. Li, “Adaptive consensus for heterogeneous multi-agent systems under sensor and actuator attacks,” Automatica, vol. 122, p. 109242, 2020. doi: 10.1016/j.automatica.2020.109242
|
| [29] |
T. Hu, Z. Lin, and B. M. Chen, “An analysis and design method for linear systems subject to actuator saturation and disturbance,” Automatica, vol. 38, no. 2, pp. 351–359, 2002. doi: 10.1016/S0005-1098(01)00209-6
|
| [30] |
G. Chen, C. Fan, J. Sun, and J. Xia, “Mean square exponential stability analysis for Itô stochastic systems with aperiodic sampling and multiple time-delays,” IEEE Trans. Autom. Control, vol. 67, no. 5, pp. 2473–2480, 2022. doi: 10.1109/TAC.2021.3074848
|
| [31] |
G. Chen, J. Xia, J. H. Park, H. Shen, and G. Zhuang, “Robust sampleddata control for switched complex dynamical networks with actuators saturation,” IEEE Trans. Cybernetics, vol. 52, no. 10, pp. 10909–10923, 2022. doi: 10.1109/TCYB.2021.3069813
|
| [1] | Qinglai Wei, Shanshan Jiao, Qi Dong, Fei-Yue Wang. Event-Triggered Robust Parallel Optimal Consensus Control for Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 40-53. doi: 10.1109/JAS.2024.124773 |
| [2] | Hongxing Xiong, Guangdeng Chen, Hongru Ren, Hongyi Li. Broad-Learning-System-Based Model-Free Adaptive Predictive Control for Nonlinear MASs Under DoS Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 381-393. doi: 10.1109/JAS.2024.124929 |
| [3] | Meilin Li, Yue Long, Tieshan Li, Hongjing Liang, C. L. Philip Chen. Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 649-660. doi: 10.1109/JAS.2023.123582 |
| [4] | Chenhong Zhu, Xiuping Han, Xiaodi Li. Analysis and Design of Time-Delay Impulsive Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(1): 196-204. doi: 10.1109/JAS.2023.123720 |
| [5] | Xuerao Wang, Qingling Wang, Yanxu Su, Yuncheng Ouyang, Changyin Sun. Adaptive Sensor-Fault Tolerant Control of Unmanned Underwater Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 907-918. doi: 10.1109/JAS.2023.123837 |
| [6] | Linling Wang, Daqi Zhu, Wen Pang, Chaomin Luo. A Novel Obstacle Avoidance Consensus Control for Multi-AUV Formation System[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1304-1318. doi: 10.1109/JAS.2023.123201 |
| [7] | Jiayu Chai, Qiang Lu, Xudong Tao, Dongliang Peng, Botao Zhang. Dynamic Event-Triggered Fixed-Time Consensus Control and Its Applications to Magnetic Map Construction[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(10): 2000-2013. doi: 10.1109/JAS.2023.123444 |
| [8] | Jingshu Sang, Dazhong Ma, Yu Zhou. Group-Consensus of Hierarchical Containment Control for Linear Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1462-1474. doi: 10.1109/JAS.2023.123528 |
| [9] | Heng Wang, Tengfei Zhang, Xiaoyu Zhang, Qing Li. Observer-Based Path Tracking Controller Design for Autonomous Ground Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 749-761. doi: 10.1109/JAS.2023.123078 |
| [10] | Xiaohua Ge, Qing-Long Han, Qing Wu, Xian-Ming Zhang. Resilient and Safe Platooning Control of Connected Automated Vehicles Against Intermittent Denial-of-Service Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1234-1251. doi: 10.1109/JAS.2022.105845 |
| [11] | Yongliang Yang, Zhijie Liu, Qing Li, Donald C. Wunsch. Output Constrained Adaptive Controller Design for Nonlinear Saturation Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(2): 441-454. doi: 10.1109/JAS.2020.1003524 |
| [12] | Zhanjie Li, Jun Zhao. Adaptive Consensus of Non-Strict Feedback Switched Multi-Agent Systems With Input Saturations[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(11): 1752-1761. doi: 10.1109/JAS.2021.1004165 |
| [13] | Wangli He, Zekun Mo, Qing-Long Han, Feng Qian. Secure Impulsive Synchronization in Lipschitz-Type Multi-Agent Systems Subject to Deception Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1326-1334. doi: 10.1109/JAS.2020.1003297 |
| [14] | Yanxu Su, Qingling Wang, Changyin Sun. Self-triggered Consensus Control for Linear Multi-agent Systems With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 150-157. doi: 10.1109/JAS.2019.1911837 |
| [15] | Yang Yang, Jie Tan, Dong Yue. Prescribed Performance Control of One-DOF Link Manipulator With Uncertainties and Input Saturation Constraint[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 148-157. doi: 10.1109/JAS.2018.7511099 |
| [16] | Nassira Zerari, Mohamed Chemachema, Najib Essounbouli. Neural Network Based Adaptive Tracking Control for a Class of Pure Feedback Nonlinear Systems With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 278-290. doi: 10.1109/JAS.2018.7511255 |
| [17] | Rui Bai. Adaptive Sliding-Mode Control of an Automotive Electronic Throttle in the Presence of Input Saturation Constraint[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(4): 878-884. doi: 10.1109/JAS.2018.7511147 |
| [18] | Mojtaba Naderi Soorki, Mohammad Saleh Tavazoei. Constrained Swarm Stabilization of Fractional Order Linear Time Invariant Swarm Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(3): 320-331. |
| [19] | Yanlong Zhou, Mou Chen, Changsheng Jiang. Robust Tracking Control of Uncertain MIMO Nonlinear Systems with Application to UAVs[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 25-32. |
| [20] | Hao Zhang, Gang Feng, Huaicheng Yan, Qijun Chen. Distributed Self-triggered Control for Consensus of Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40-45. |
Figures(6)




X. Wang, D. Yu, and X. Li, “Impulsive consensus of MASs with input saturation and DoS attacks,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 2, pp. 414–424, Feb. 2025. doi: 10.1109/JAS.2024.124944
 DownLoad:
DownLoad:

 DownLoad:
DownLoad: