A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 1
Volume 12
Issue 1
IEEE/CAA Journal of Automatica Sinica
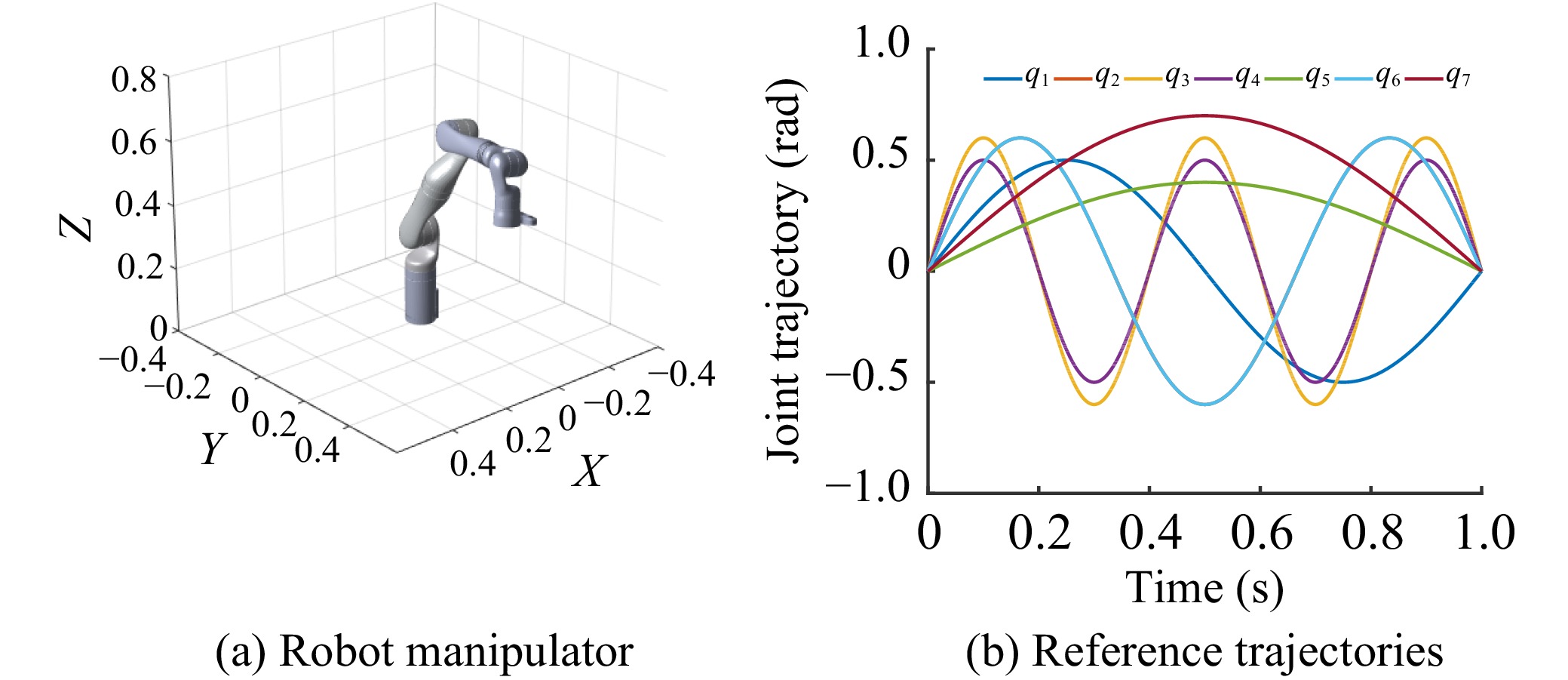
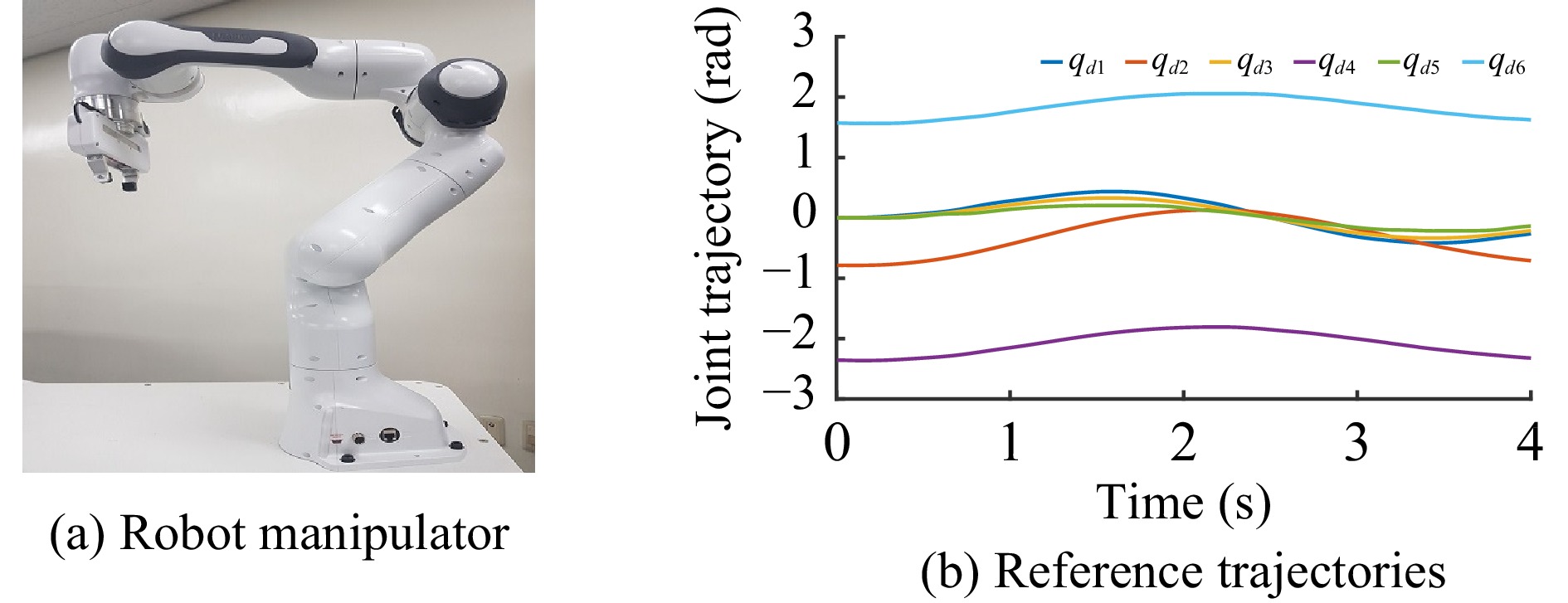
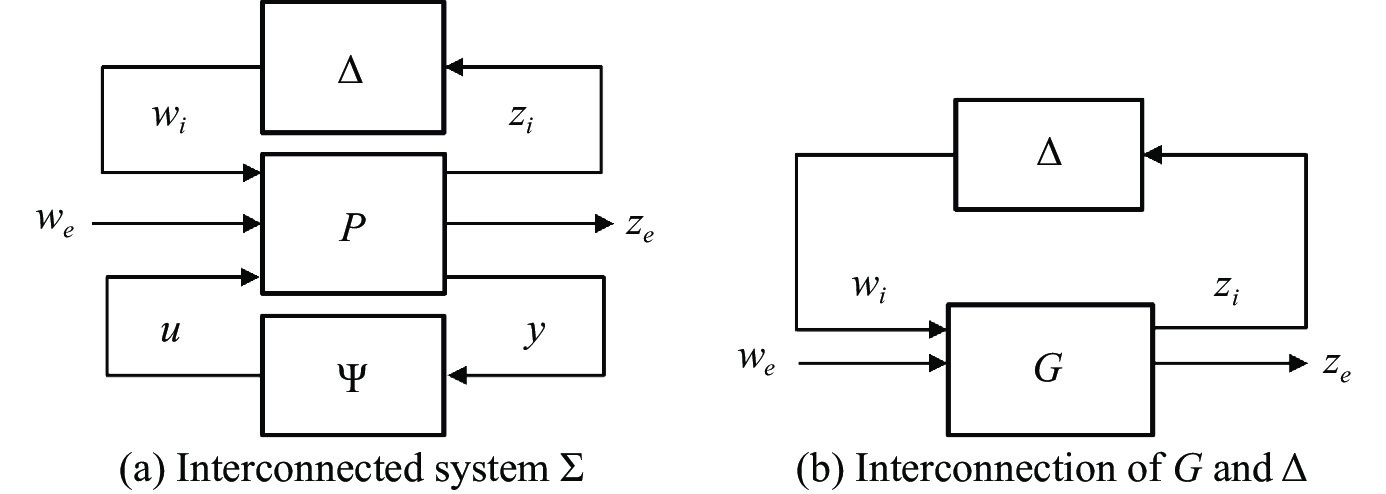
| Citation: | G. I. Song, H. Park, and J. Kim, “The H∞ robust stability and performance conditions for uncertain robot manipulators,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 1, pp. 270–272, Jan. 2025. doi: 10.1109/JAS.2024.124701

|

| [1] |
J. H. Kim, S.-m. Hur, and Y. Oh, “Performance analysis for bounded persistent disturbances in PD/PID-controlled robotic systems with its experimental demonstrations,” Int. J. Cont., vol. 91, no. 3, pp. 688–705, 2018. doi: 10.1080/00207179.2017.1288301
|
| [2] |
H. Y. Park and J. H. Kim, “Model-free control approach to uncertain Euler-Lagrange equations with a Lyapunov-based $L_\infty $-gain analysis,” AIMS Mathematics, vol. 8, no. 8, pp. 17666–17686, 2023. doi: 10.3934/math.2023902
|
| [3] |
D. Nakhaeinia, P. Payeur, and R. Laganière, “A mode-switching motion control system for reactive interaction and surface following using industrial robots,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 670–682, 2018. doi: 10.1109/JAS.2018.7511069
|
| [4] |
Y. Yang, J. Tan, and D. Yue, “Prescribed performance control of one-DOF link manipulator with uncertainties and input saturation constraint,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 148–157, 2019. doi: 10.1109/JAS.2018.7511099
|
| [5] |
S. K. Pradhan and B. Subudhi, “Position control of a flexible manipulator using a new nonlinear self-tuning PID controller,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 136–149, 2020. doi: 10.1109/JAS.2017.7510871
|
| [6] |
S. Baek, H. Lee, and S. Han, “Communication-efficient event-triggered time-delay control and its application to robot manipulators,” IEEE Trans. Ind. Elec., vol. 69, no. 9, pp. 9288–9297, 2022. doi: 10.1109/TIE.2021.3114696
|
| [7] |
J. Baek, W. Kwon, and C. Kang, “A new widely and stably adaptive sliding-mode control with nonsingular terminal sliding variable for robot manipulators,” IEEE Access, vol. 8, pp. 43443–43454, 2020. doi: 10.1109/ACCESS.2020.2977434
|
| [8] |
Z. Li and S. Li, “Neural network model-based control for manipulator: an autoencoder perspective,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 6, pp. 2854–2868, 2023. doi: 10.1109/TNNLS.2021.3109953
|
| [9] |
J. Ibarz, J. Tan, C. Finn, M. Kalakrishnan, P. Pastor, and S. Levine, “How to train your robot with deep reinforcement learning: Lessons we have learned,” Int. J. Robotics Res., vol. 40, pp. 698–721, 2021. doi: 10.1177/0278364920987859
|
| [10] |
B. M. Yilmaz, E. Tatlicioglu, A. Savran, and M. Alci, “Self-adjusting fuzzy logic based control of robot manipulators in task space,” IEEE Trans. Ind. Electron., vol. 69, no. 2, pp. 1620–1629, 2022. doi: 10.1109/TIE.2021.3063970
|
| [11] |
F. L. Lewis, D. M. Dawson, and C. T. Abdallah, Robot Manipulator Control: Theory and Practice, Boca Raton, USA: CRC Press, 2003.
|
| [12] |
U. Mackenroth, Robust Control Systems: Theory and Case Studies. Berlin, Germany: Springer Science & Business Media, 2013.
|
| [13] |
Y. Hitachi and H. Liu, “H-infinity-LTR technique applied to robust control of propulsion-controlled aircraft,” in Proc. AIAA Guidance, Nav. Cont. Conf., 2009, pp. 1–24.
|
| [14] |
S. S. Pchelkin, A. S. Shiriaev, A. Robertsson, L. B. Freidovich, S. A. Kolyubin, L. V. Paramonov, and S. V. Gusev, “On orbital stabilization for industrial manipulators: Case study in evaluating performances of modified PD+ and inverse dynamics controllers,” IEEE Trans. Cont. Syst. Tech., vol. 25, no. 1, pp. 101–117, 2017. doi: 10.1109/TCST.2016.2554520
|
| [15] |
C. Scherer and S. Weiland, Linear Matrix Inequalities in Control. Delft, The Netherlands: Delft Center for Systems and Control, 2015.
|
| [16] |
G. I. Song and J. H. Kim, “Time-delay compensation-based robust control of mechanical manipulators: Operator-theoretic analysis and experiment validation,” Math. Methods Appl. Sci., vol. 47, no. 1, pp. 318–355, 2024. doi: 10.1002/mma.9656
|
Figures(3) / Tables(2)






 DownLoad:
DownLoad: