A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 9
Volume 11
Issue 9
IEEE/CAA Journal of Automatica Sinica
| Citation: | W. Yang, S. Li, and X. Luo, “Data driven vibration control: A review,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 9, pp. 1898–1917, Sept. 2024. doi: 10.1109/JAS.2024.124431

|
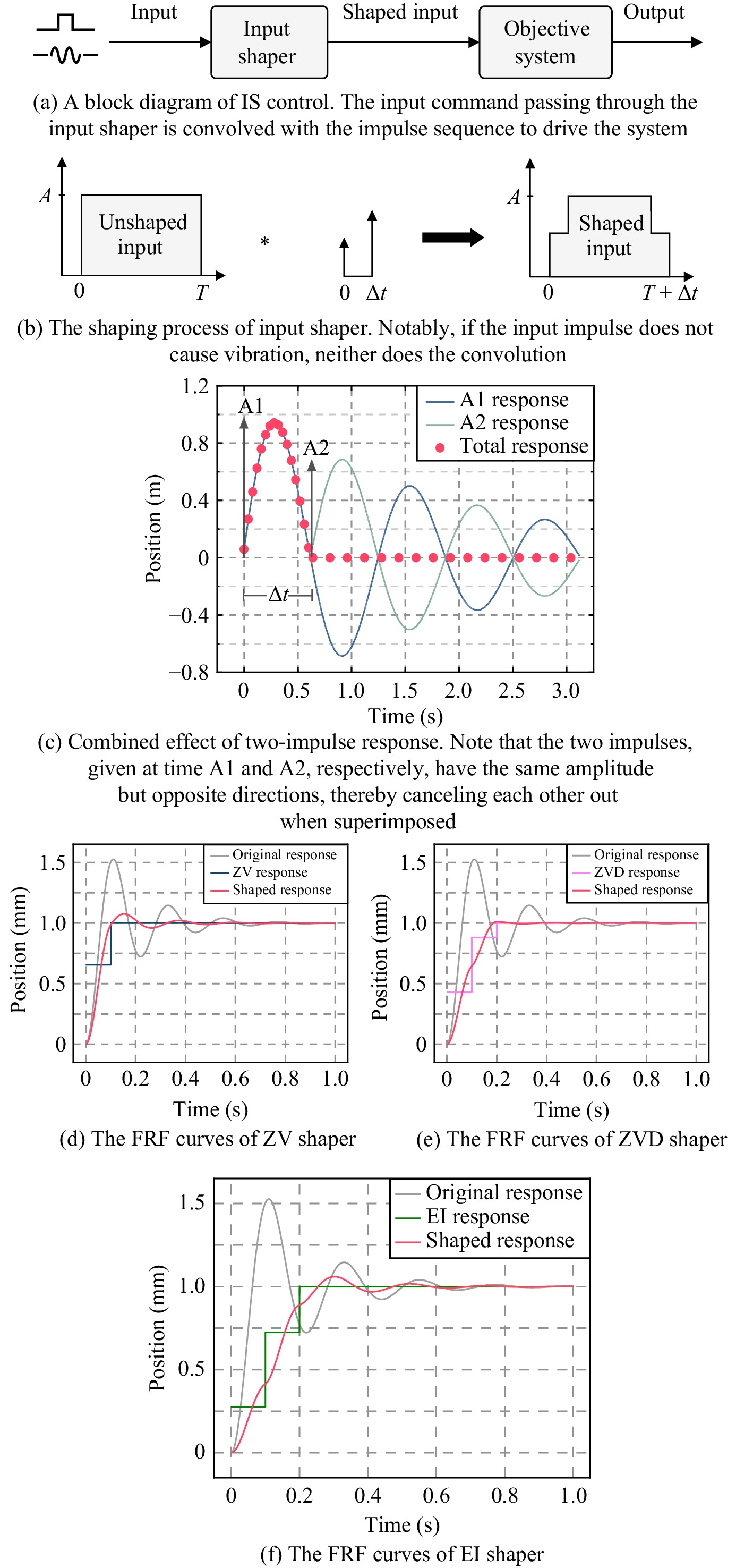
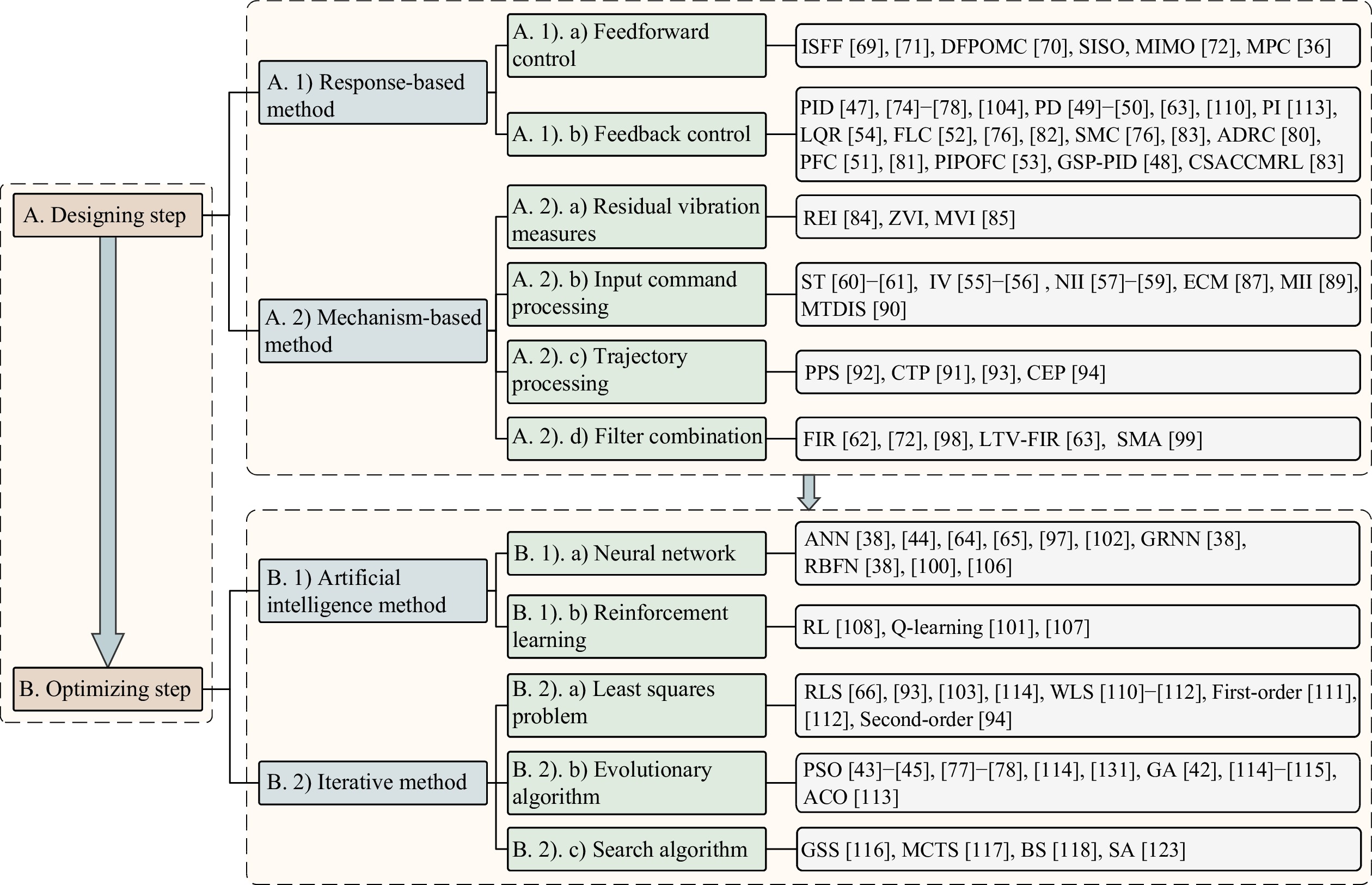
With the ongoing advancements in sensor networks and data acquisition technologies across various systems like manufacturing, aviation, and healthcare, the data driven vibration control (DDVC) has attracted broad interests from both the industrial and academic communities. Input shaping (IS), as a simple and effective feedforward method, is greatly demanded in DDVC methods. It convolves the desired input command with impulse sequence without requiring parametric dynamics and the closed-loop system structure, thereby suppressing the residual vibration separately. Based on a thorough investigation into the state-of-the-art DDVC methods, this survey has made the following efforts: 1) Introducing the IS theory and typical input shapers; 2) Categorizing recent progress of DDVC methods; 3) Summarizing commonly adopted metrics for DDVC; and 4) Discussing the engineering applications and future trends of DDVC. By doing so, this study provides a systematic and comprehensive overview of existing DDVC methods from designing to optimizing perspectives, aiming at promoting future research regarding this emerging and vital issue.

| [1] |
X.-J. Li and X.-Y. Shen, “A data-driven attack detection approach for DC servo motor systems based on mixed optimization strategy,” IEEE Trans. Ind. Inf., vol. 16, no. 9, pp. 5806–5813, Sep. 2020. doi: 10.1109/TII.2019.2960616
|
| [2] |
A. Wahrburg, J. Jurvanen, M. Niemelä, and M. Holmberg, “Input shaping for non-zero initial conditions and arbitrary input signals with an application to overhead crane control,” in Proc. IEEE 17th Int. Conf. Advanced Motion Control, Padova, Italy, 2022, pp. 36–41.
|
| [3] |
H. Wu, X. Luo, and M. C. Zhou, “Advancing non-negative latent factorization of tensors with diversified regularization schemes,” IEEE Trans. Serv. Comput., vol. 15, no. 3, pp. 1334–1344, May–Jun. 2022. doi: 10.1109/TSC.2020.2988760
|
| [4] |
V. D. La and K. T. Nguyen, “Combination of input shaping and radial spring-damper to reduce tridirectional vibration of crane payload,” Mech. Syst. Signal Process., vol. 116, pp. 310–321, Feb. 2019. doi: 10.1016/j.ymssp.2018.06.056
|
| [5] |
A. Villalonga, G. Beruvides, F. Castaño, and R. E. Haber, “Cloud-based industrial cyber-physical system for data-driven reasoning: A review and use case on an Industry 4.0 pilot line,” IEEE Trans. Ind. Inf., vol. 16, no. 9, pp. 5975–5984, Sep. 2020. doi: 10.1109/TII.2020.2971057
|
| [6] |
M. Sun and D. Liu, “Two-loop control of harvesting mechanical arm base on adaptive input shaping algorithm,” in Proc. Int. Conf. Virtual Reality, Human-Computer Interaction and Artificial Intelligence, Changsha, China, 2022, pp. 182–188.
|
| [7] |
A. Mohammed, K. Alghanim, and M. T. Andani, “An adjustable zero vibration input shaping control scheme for overhead crane systems,” Shock Vib., vol. 2020, p. 7879839, May 2020.
|
| [8] |
D. K. Thomsen, R. Søe-Knudsen, O. Balling, and X. Zhang, “Vibration control of industrial robot arms by multi-mode time-varying input shaping,” Mech. Mach. Theory, vol. 155, p. 104072, Jan. 2021. doi: 10.1016/j.mechmachtheory.2020.104072
|
| [9] |
Y. Song, W. He, X. He, and Z. Han, “Vibration control of a high-rise building structure: Theory and experiment,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 866–875, Apr. 2021. doi: 10.1109/JAS.2021.1003937
|
| [10] |
Z.-S. Ma, X. Li, M.-X. He, S. Jia, Q. Yin, and Q. Ding, “Recent advances in data-driven dynamics and control,” Int. J. Dyn. Control, vol. 8, no. 4, pp. 1200–1221, Aug. 2020. doi: 10.1007/s40435-020-00675-2
|
| [11] |
Z.-C. Qin and Y. Xin, “Data-driven H∞ vibration control design and verification for an active suspension system with unknown pseudo-drift dynamics,” Commun. Nonlinear Sci. Numer. Simul., vol. 125, no. 1, p. 107397, Oct. 2023.
|
| [12] |
H. Liu, C. Zhao, X. Huang, and G. Yao, “Data-driven modeling for the dynamic behavior of nonlinear vibratory systems,” Nonlinear Dyn., vol. 111, no. 12, pp. 10809–10834, Apr. 2023. doi: 10.1007/s11071-023-08404-y
|
| [13] |
M. Azimi, A. D. Eslamlou, and G. Pekcan, “Data-driven structural health monitoring and damage detection through deep learning: State-of-the-art review,” Sensors, vol. 20, no. 10, p. 2778, May 2020. doi: 10.3390/s20102778
|
| [14] |
Y. Zhang, S. Li, J. Weng, and B. Liao, “GNN model for time-varying matrix inversion with robust finite-time convergence,” IEEE Trans. Neural Netw. Learn. Syst., vol. 35, no. 1, pp. 559–569, Jan. 2024. doi: 10.1109/TNNLS.2022.3175899
|
| [15] |
P. Tacx and T. Oomen, “Comparing multivariable uncertain model structures for data-driven robust control: Visualization and application to a continuously variable transmission,” Int. J. Robust Nonlinear Control, vol. 33, no. 16, pp. 9636–9664, Nov. 2023. doi: 10.1002/rnc.6866
|
| [16] |
W. Yang, S. Li, Z. Li, and X. Luo, “Highly accurate manipulator calibration via extended Kalman filter-incorporated residual neural network,” IEEE Trans. Ind. Inf., vol. 19, no. 11, pp. 10831–10841, Nov. 2023. doi: 10.1109/TII.2023.3241614
|
| [17] |
L. Liu, S. Tian, D. Xue, T. Zhang, and Y. Chen, “Industrial feedforward control technology: A review,” J. Intell. Manuf., vol. 30, no. 8, pp. 2819–2833, Dec. 2019. doi: 10.1007/s10845-018-1399-6
|
| [18] |
S. Engelberg, “Input shaping: A tutorial introduction [lecture notes],” IEEE Control Syst. Mag., vol. 41, no. 2, pp. 45–51, Apr. 2021. doi: 10.1109/MCS.2020.3048455
|
| [19] |
D.-X. Liu, J.-C. Zhang, Y. Li, and J.-J. Fang, “Research on adaptive input shaping control of fruits and vegetable harvesting robot arm,” Control Theory Appl., vol. 39, no. 6, pp. 1043–1050, Jun. 2022.
|
| [20] |
A. Kobilov and S. W. Hong, “Delay-time adjustable input shaping method for positioning systems subject to repetitive motion,” J. Korean Soc. Precis. Eng., vol. 37, no. 1, pp. 25–34, Jan. 2020. doi: 10.7736/JKSPE.019.104
|
| [21] |
A. H. Khan, X. Cao, S. Li, V. N. Katsikis, and L. Liao, “BAS-ADAM: An ADAM based approach to improve the performance of beetle antennae search optimizer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 461–471, Mar. 2020. doi: 10.1109/JAS.2020.1003048
|
| [22] |
Y. Zhou, X. Luo, and M. C. Zhou, “Cryptocurrency transaction network embedding from static and dynamic perspectives: An overview,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1105–1121, May 2023. doi: 10.1109/JAS.2023.123450
|
| [23] |
M. O. T. Cole and P. Kuresangsai, “Convolution-based input shaping for finite-time settling in non-LTI systems: An LTV approach,” in Proc. IEEE Conf. Control Technology and Applications, Hong Kong, China, 2019, pp. 964–969.
|
| [24] |
A. A. M. Awi, S. S. N. N. Zawawi, L. Ramli, and I. M. Lazim, “Robust input shaping for swing control of an overhead crane,” in Proc. 22nd Asia Simulation Conf., Langkawi, Malaysia, 2023, pp. 180–187.
|
| [25] |
S. W. Hwang, D. H. Kim, J. Park, and J. H. Park, “Equilibrium configuration analysis and equilibrium-based trajectory generation method for under-constrained cable-driven parallel robot,” IEEE Access, vol. 10, pp. 112134–112149, Oct. 2022. doi: 10.1109/ACCESS.2022.3215720
|
| [26] |
Y. Shi, W. Sheng, S. Li, B. Li, and X. Sun, “Neurodynamics for equality-constrained time-variant nonlinear optimization using discretization,” IEEE Trans. Ind. Inf., vol. 20, no. 2, pp. 2354–2364, Feb. 2024. doi: 10.1109/TII.2023.3290187
|
| [27] |
M. Kasprowiak, A. Parus, and M. Hoffmann, “Vibration suppression with use of input shaping control in machining,” Sensors, vol. 22, no. 6, p. 2186, Mar. 2022. doi: 10.3390/s22062186
|
| [28] |
S. W. Hwang, J.-H. Bak, J. Yoon, and J. H. Park, “Oscillation reduction and frequency analysis of under-constrained cable-driven parallel robot with three cables,” Robotica, vol. 38, no. 3, pp. 375–395, Mar. 2020. doi: 10.1017/S0263574719000687
|
| [29] |
Z. Li, S. Li, and X. Luo, “An overview of calibration technology of industrial robots,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 23–36, Jan. 2021. doi: 10.1109/JAS.2020.1003381
|
| [30] |
R. Rehammar and S. Gasparinetti, “Low-pass filter with ultrawide stopband for quantum computing applications,” IEEE Trans. Microwave Theory Tech., vol. 71, no. 7, pp. 3075–3080, Jul. 2023. doi: 10.1109/TMTT.2023.3238543
|
| [31] |
L. Chen, H. Zhu, R. Gómez-García, and X. Zhu, “Miniaturized on-chip notch filter with sharp selectivity and >35-dB attenuation in 0.13-μm bulk CMOS technology,” IEEE Electron Device Lett., vol. 43, no. 8, pp. 1175–1178, Aug. 2022. doi: 10.1109/LED.2022.3184920
|
| [32] |
S. Fujii and Q.-C. Pham, “Realtime trajectory smoothing with neural nets,” in Proc. Int. Conf. Robotics and Automation, Philadelphia, USA, 2022, pp. 7248–7254.
|
| [33] |
Y. Liu and Z. Yang, “Trajectory smoothing algorithm based on Kalman filter,” in Proc. 7th Int. Conf. Machine Vision and Information Technology, Xiamen, China, 2023, pp. 52–56.
|
| [34] |
D. Zhu, Y. He, X. Yu, and F. Li, “Trajectory smoothing planning of delta parallel robot combining Cartesian and joint space,” Mathe matics, vol. 11, no. 21, p. 4509, Nov. 2023. doi: 10.3390/math11214509
|
| [35] |
R. Piedrafita, D. Comín, and J. R. Beltrán, “Simulink.® implementation and industrial test of Input Shaping techniques,” Control Eng. Practice, vol. 79, pp. 1–21, Oct. 2018. doi: 10.1016/j.conengprac.2018.06.021
|
| [36] |
H. Ghorbani, K. Alipour, B. Tarvirdizadeh, and A. Hadi, “Comparison of various input shaping methods in rest-to-rest motion of the end-effecter of a rigid-flexible robotic system with large deformations capability,” Mech. Syst. Signal Process., vol. 118, pp. 584–602, Mar. 2019. doi: 10.1016/j.ymssp.2018.09.003
|
| [37] |
H. H. Bilgic, C. Conker, and H. Yavuz, “Fuzzy logic-based decision support system for selection of optimum input shaping techniques in point-to-point motion systems,” Proc. Inst. Mech. Eng. Part I: J. Syst. Control Eng., vol. 235, no. 6, pp. 795–808, Jul. 2021.
|
| [38] |
H. Yavuz and S. Beller, “An intelligent serial connected hybrid control method for gantry cranes,” Mech. Syst. Signal Process., vol. 146, p. 107011, Jan. 2021. doi: 10.1016/j.ymssp.2020.107011
|
| [39] |
Y. Zhang and S. Li, “Kinematic control of serial manipulators under false data injection attack,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 1009–1019, Apr. 2023. doi: 10.1109/JAS.2023.123132
|
| [40] |
P. Zhao, Y. Zhou, and R. Zhou, “A new trajectory optimizing method using input shaping principles,” Shock Vib., vol. 2018, p. 4173253, Sep. 2018.
|
| [41] |
A. Mohammed, K. Alghanim, and M. T. Andani, “A robust input shaper for trajectory control of overhead cranes with non-zero initial states,” Int. J. Dyn. Control, vol. 9, no. 1, pp. 230–239, Mar. 2021. doi: 10.1007/s40435-020-00631-0
|
| [42] |
T. Yi, Q. Pei, D. Li, S. Wei, D. Jia, and H. Zhang, “Optimization of simulation parameters of input shaper based on genetic algorithm,” in Proc. 2nd Int. Conf. Advanced Tech. in Intelligent Control, Environ., Comput. & Communi. Engineering, Bangalore, India, 2022, pp. 1–6.
|
| [43] |
B. Xu, R. Wang, B. Peng, F. A. Alqurashi, and M. Salama, “Automatic parameter selection ZVD shaping algorithm for crane vibration suppression based on particle swarm optimisation,” Appl. Math. Nonlinear Sci., vol. 7, no. 1, pp. 73–82, Jan. 2022. doi: 10.2478/amns.2021.1.00075
|
| [44] |
L. Ramli, Z. Mohamed, and H. I. Jaafar, “A neural network-based input shaping for swing suppression of an overhead crane under payload hoisting and mass variations,” Mech. Syst. Signal Process., vol. 107, pp. 484–501, Jul. 2018. doi: 10.1016/j.ymssp.2018.01.029
|
| [45] |
W. Tang, R. Ma, W. Wang, and H. Gao, “Optimization-based input-shaping swing control of overhead cranes,” Appl. Sci., vol. 13, no. 17, p. 9637, Aug. 2023. doi: 10.3390/app13179637
|
| [46] |
H. I. Jaafar, Z. Mohamed, M. A. Shamsudin, N. A. M. Subha, L. Ramli, and A. M. Abdullahi, “Model reference command shaping for vibration control of multimode flexible systems with application to a double-pendulum overhead crane,” Mech. Syst. Signal Process., vol. 115, pp. 677–695, Jan. 2019. doi: 10.1016/j.ymssp.2018.06.005
|
| [47] |
H. I. Jaafar, Z. Mohamed, M. A. Ahmad, N. A. Wahab, L. Ramli, and M. H. Shaheed, “Control of an underactuated double-pendulum overhead crane using improved model reference command shaping: Design, simulation and experiment,” Mech. Syst. Signal Process., vol. 151, p. 107358, Apr. 2021. doi: 10.1016/j.ymssp.2020.107358
|
| [48] |
M.-N. Pham, B. Hazel, P. Hamelin, and Z. Liu, “Vibration control of flexible joint robots using a discrete-time two-stage controller based on time-varying input shaping and delay compensation,” J. Dyn. Syst., Meas. Control, vol. 143, no. 10, p. 101001, Oct. 2021. doi: 10.1115/1.4050885
|
| [49] |
A. Stein and T. Singh, “Input shaped control of a gantry crane with inertial payload,” in Proc. American Control Conf., Atlanta, USA, 2022, pp. 4127–4132.
|
| [50] |
Y. Du, X. Song, and B. Han, “Improvement and experimental research on high-speed magnetic blower and pipeline system,” J. Vib. Meas. Diagn., vol. 39, no. 3, pp. 512–517, Jun. 2019.
|
| [51] |
S. Zou, B. Pan, Y. Fu, and S. Guo, “Position control and vibration suppression for flexible-joint surgical robot,” in Proc. 3rd Int. Conf. Control, Robotics and Cybern., Penang, Malaysia, 2018, pp. 42–47.
|
| [52] |
J. Xu, H. Fang, T. Zhou, Y.-H. Chen, H. Guo, and F. Zeng, “Optimal robust position control with input shaping for flexible solar array drive system: A fuzzy-set theoretic approach,” IEEE Trans. Fuzzy Syst., vol. 27, no. 9, pp. 1807–1817, Sep. 2019. doi: 10.1109/TFUZZ.2019.2892339
|
| [53] |
J.-H. Shin, D.-H. Lee, and M. K. Kwak, “Vibration suppression of cart-pendulum system by combining the input-shaping control and the position-input position-output feedback control,” J. Mech. Sci. Technol., vol. 33, no. 12, pp. 5761–5768, Dec. 2019. doi: 10.1007/s12206-019-1120-5
|
| [54] |
D. Newman and J. Vaughan, “Concurrent design of linear control with input shaping for a two-link flexible manipulator arm,” IFAC-PapersOnLine, vol. 51, no. 14, pp. 66–71, Jan. 2018. doi: 10.1016/j.ifacol.2018.07.200
|
| [55] |
B. B. Kang, “Specified-duration shapers for suppressing residual vibrations,” PLoS One, vol. 17, no. 11, p. e0276669, Nov. 2022. doi: 10.1371/journal.pone.0276669
|
| [56] |
C.-G. Kang, R. Hassan, and K.-Y. Kim, “Analysis of a generalized ZVD shaper using impulse vectors,” Int. J. Control Autom. Syst., vol. 18, no. 8, pp. 2088–2094, Feb. 2020. doi: 10.1007/s12555-019-0214-2
|
| [57] |
B. Li, Y.-L. Wei, P.-F. Ou, and Q.-Z. Zhang, “Robustness analysis on vibration reduction of negative impulses hybrid multiple-modal input shapers,” Mach. Des. Manuf., no. 1, pp. 132–135, Jan. 2020.
|
| [58] |
Y. Wei, B. Li, Q. Zhang, and P. Ou, “Quick suppression of vibration of robot via hybrid input shaping control strategy,” J. Northwestern Polytechnical Univ., vol. 37, no. 3, pp. 636–641, Jun. 2019. doi: 10.1051/jnwpu/20193730636
|
| [59] |
X. Cao, C. Meng, Y. Zhou, and M. Zhu, “An improved negative zero vibration anti-swing control strategy for grab ship unloader based on elastic wire rope model,” Mech. Ind., vol. 22, no. 45, pp. 1–10, Nov. 2021.
|
| [60] |
L. Li, X. Hu, and Y. Zou, “Residual vibration suppression by an integrated method of parameter identification and input shaping,” J. Vib. Meas. Diagn., vol. 39, no. 3, pp. 565–570, Jun. 2019.
|
| [61] |
C. Liu and Y. Chen, “Combined S-curve feedrate profiling and input shaping for glass substrate transfer robot vibration suppression,” Ind. Rob., vol. 45, no. 4, pp. 549–560, Aug. 2019.
|
| [62] |
A. Gavula, P. Hubinský, and A. Babinec, “Damping of oscillations of a rotary pendulum system,” Appl. Sci., vol. 13, no. 21, p. 11946, Nov. 2023. doi: 10.3390/app132111946
|
| [63] |
P. Kuresangsai and M. O. T. Cole, “Control of a nonlinear flexure-jointed X-Y positioning stage using LTV-FIR command prefiltering for finite-time error cancellation,” Mech. Syst. Signal Process., vol. 151, p. 107349, Apr. 2021. doi: 10.1016/j.ymssp.2020.107349
|
| [64] |
S. M. Fasih, Z. Mohamed, A. R. Husain, L. Ramli, A. M. Abdullahi, and W. Anjum, “Payload swing control of a tower crane using a neural network-based input shaper,” Meas. Control, vol. 53, no. 7–8, pp. 1171–1182, Aug.–Sep. 2020. doi: 10.1177/0020294020920895
|
| [65] |
L. Rincon, Y. Kubota, G. Venture, and Y. Tagawa, “Inverse dynamic control via “simulation of feedback control” by artificial neural networks for a crane system,” Control Eng. Pract., vol. 94, p. 104203, Jan. 2020. doi: 10.1016/j.conengprac.2019.104203
|
| [66] |
J. J. Wilbanks and M. J. Leamy, “Robust two-scale command shaping for residual vibration mitigation in nonlinear systems,” J. Sound Vib., vol. 462, p. 114927, Dec. 2019. doi: 10.1016/j.jsv.2019.114927
|
| [67] |
M. M. İlman, Ş. Yavuz, and P. Y. Taser, “Generalized input preshaping vibration control approach for multi-link flexible manipulators using machine intelligence,” Mechatronics, vol. 82, p. 102735, Apr. 2022. doi: 10.1016/j.mechatronics.2021.102735
|
| [68] |
S. F. ur Rehman, Z. Mohamed, A. R. Husain, L. Ramli, M. A. Abbasi, W. Anjum, and M. H. Shaheed, “Adaptive input shaper for payload swing control of a 5-DOF tower crane with parameter uncertainties and obstacle avoidance,” Autom. Constr., vol. 154, p. 104963, Oct. 2023. doi: 10.1016/j.autcon.2023.104963
|
| [69] |
D. Bruijnen and N. van Dijk, “Combined input shaping and feedforward control for flexible motion systems,” in Proc. American Control Conf., Montreal, Canada, 2012, pp. 2473–2478.
|
| [70] |
L. Yang and H. Zhang, “Data-driven feedforward parameter tuning optimization method under actuator constraints,” IEEE/ASME Trans. Mechatron., vol. 27, no. 5, pp. 3429–3439, Oct. 2022. doi: 10.1109/TMECH.2022.3141738
|
| [71] |
F. Boeren, D. Bruijnen, N. van Dijk, and T. Oomen, “Joint input shaping and feedforward for point-to-point motion: Automated tuning for an industrial nanopositioning system,” Mechatronics, vol. 24, no. 6, pp. 572–581, Sep. 2014. doi: 10.1016/j.mechatronics.2014.03.005
|
| [72] |
M. Heertjes and D. Bruijnen, “MIMO FIR feedforward design for zero error tracking control,” in Proc. American Control Conf., Portland, USA, 2014, pp. 2166–2171.
|
| [73] |
M. Giacomelli, M. Faroni, D. Gorni, A. Marini, L. Simoni, and A. Visioli, “Model Predictive Control for operator-in-the-loop overhead cranes,” in Proc. IEEE 23rd Int. Conf. Emerging Technologies and Factory Automation, Turin, Italy, 2018, pp. 589–596.
|
| [74] |
W. Tang, R. Ma, W. Wang, T. Xu, H. Gao, and X. Wang, “Composite control of overhead cranes based on input shaper and PID,” in Proc. 42nd Chinese Control Conf., Tianjin, China, 2023, pp. 2568–2572.
|
| [75] |
A. Dautt-Silva and R. A. de Callafon, “Reference signal shaping for closed-loop systems with causality constraints,” in Proc. 60th IEEE Conf. Decision and Control, Austin, USA, 2021, pp. 1838–1843.
|
| [76] |
I. A. Martin and R. A. Irani, “Evaluation of both linear and non-linear control strategies for a shipboard marine gantry crane,” in Proc. OCEANS MTS/IEEE SEATTLE, Seattle, USA, 2019, pp. 1–10.
|
| [77] |
P. B. de Moura Oliveira and D. Vrančić, “Practical validation of a dual mode feedforward-feedback control scheme in an Arduino kit,” in Proc. 14th APCA Int. Conf. Automatic Control and Soft Computing, Bragança, Portugal, 2020, pp. 538–547.
|
| [78] |
J. Oliveira, P. M. Oliveira, T. M. Pinho, and J. B. Cunha, “PID posicast control for uncertain oscillatory systems: A practical experiment,” IFAC-PapersOnLine, vol. 51, no. 4, pp. 416–421, Jan. 2018. doi: 10.1016/j.ifacol.2018.06.130
|
| [79] |
M. D. Duong, Q. T. Dao, and T. H. Do, “Settling time optimization of a critically damped system with input shaping for vibration suppression control,” Eng. Technol. Appl. Sci. Res., vol. 12, no. 5, pp. 9388–9394, Oct. 2022. doi: 10.48084/etasr.5242
|
| [80] |
Q. Cui, Y. Xue, D. Li, and L. Sun, “A robust control methodology based on active disturbance rejection control and input shaping,” in Proc. 18th Int. Conf. Control, Auto. and Systems, PyeongChang, South Korea, 2018, pp. 968–973.
|
| [81] |
M. Abdullah and J. A. Rossiter, “Input shaping predictive functional control for different types of challenging dynamics processes,” Processes, vol. 6, no. 8, p. 118, Aug. 2018. doi: 10.3390/pr6080118
|
| [82] |
G. A. Kocak, H. H. Bilgic, and C. Conker, “A fuzzy logic-based intelligent decision support system for the selection of an appropriate input-shaping technique for controlling flexible link systems,” Int. J. Modell. Simul., vol. 42, no. 5, pp. 868–881, Nov. 2021.
|
| [83] |
M. Yuan, L. Wang, W. Chen, B. Qiu, and Y. Xu, “Vibration suppression for forging robots based on input shaping and sliding mold,” Comput. Integr. Manuf. Syst., vol. 28, no. 1, pp. 102–111, Jan. 2022.
|
| [84] |
X. Shan, Y. Li, H. Liu, and T. Huang, “Residual vibration reduction of high-speed pick-and-place parallel robot using input shaping,” Chin. J. Mech. Eng., vol. 35, no. 1, p. 16, Feb. 2022. doi: 10.1186/s10033-022-00679-3
|
| [85] |
K. Alghanim, A. Mohammed, and M. T. Andani, “An input shaping control scheme with application on overhead cranes,” Int. J. Nonlinear Sci. Numer. Simul., vol. 20, no. 5, pp. 561–573, Apr. 2019. doi: 10.1515/ijnsns-2018-0152
|
| [86] |
C.-G. Kang, “Impulse vectors for input-shaping control: A mathematical tool to design and analyze input shapers,” IEEE Control Syst. Mag., vol. 39, no. 4, pp. 40–55, Aug. 2019. doi: 10.1109/MCS.2019.2913610
|
| [87] |
L. Li, X.-Q. Hu, Y.-B. Zou, and X.-G. Liu, “Reducing vibration by error compensation input shaping technique,” J. Vib. Eng., vol. 32, no. 6, pp. 996–1002, Dec. 2019.
|
| [88] |
Z. Li, H. Zhao, and H. Ding, “Optimization of contact control in grinding and polishing process of industrial blades,” Modular Mach. Tool Autom. Manuf. Tech., vol. 2, no. 2, pp. 99–106, Feb. 2021.
|
| [89] |
P. Du, W. Niu, and C. Chen, “Crane anti swing method based on input shaping with pulse input,” Comput. Meas. Control, vol. 26, no. 10, pp. 235–239, Mar. 2018.
|
| [90] |
Y. Zhao and M. Tomizuka, “Modified zero time delay input shaping for industrial robot with flexibility,” in Proc. ASME Dynamic Systems and Control Conf., Tysons, USA, 2017, pp. 1–6.
|
| [91] |
M. Zhang, H. Zou, H. Wang, and G. Tang, “Vibration suppression during operation of mechanical arm with two degrees of freedom based on input shaping method,” Aerosp. Shanghai (Chin. Engl.), vol. 37, no. 5, pp. 37–42, May 2020.
|
| [92] |
T. Zhang, K. Lin, Y. Zou, and X. Liu, “An input shaper with control of error optimization for end-effector’s residual vibration suppression of industrial robots,” J. Xi’an Jiaotong Univ., vol. 52, no. 4, pp. 90–97, Apr. 2018.
|
| [93] |
L. Li, Z.-C. Gu, and T. Zhang, “Adaptive vibration suppression control for trajectory motion in Cartesian space of industrial robot,” J. Vib. Eng., vol. 34, no. 3, pp. 499–506, Jun. 2021.
|
| [94] |
W. Wang, C. Hu, K. Zhou, and Z. Wang, “Time parameter mapping and contour error precompensation for multiaxis input shaping,” IEEE Trans. Ind. Inf., vol. 19, no. 3, pp. 2640–2651, Mar. 2023. doi: 10.1109/TII.2022.3158960
|
| [95] |
F. Bi, X. Luo, B. Shen, H. Dong, and Z. Wang, “Proximal alternating-direction-method-of-multipliers-incorporated nonnegative latent factor analysis,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 6, pp. 1388–1406, Jun. 2023. doi: 10.1109/JAS.2023.123474
|
| [96] |
M. J. Maghsoudi, L. Ramli, S. Sudin, Z. Mohamed, A. R. Husain, and H. Wahid, “Improved unity magnitude input shaping scheme for sway control of an underactuated 3D overhead crane with hoisting,” Mech. Syst. Signal Process., vol. 123, pp. 466–482, May 2019. doi: 10.1016/j.ymssp.2018.12.056
|
| [97] |
M. Newman, K. Lu, and M. Khoshdarregi, “Suppression of robot vibrations using input shaping and learning-based structural models,” J. Intell. Mater. Syst. Struct., vol. 32, no. 9, pp. 1001–1012, May 2021. doi: 10.1177/1045389X20947166
|
| [98] |
D. K. Thomsen, R. Søe-Knudsen, D. Brandt, O. Balling, and X. Zhang, “Smooth online time-varying input shaping with fractional delay FIR filtering,” Control Eng. Pract., vol. 88, pp. 21–37, Jul. 2019. doi: 10.1016/j.conengprac.2019.04.003
|
| [99] |
J. Kim and E. A. Croft, “Preshaping input trajectories of industrial robots for vibration suppression,” Rob. Comput.-Integr. Manuf., vol. 54, pp. 35–44, Dec. 2018. doi: 10.1016/j.rcim.2018.05.009
|
| [100] |
T. Wang, T. Zhang, A. Song, and Y. Zhang, “An input shaping based active vibration control and adaptive RBF impedance control for suppressing the myospasm in upper-limb rehabilitation,” Appl. Soft Comput., vol. 95, p. 106380, Oct. 2020. doi: 10.1016/j.asoc.2020.106380
|
| [101] |
M. Vu, D. Newman, and J. Vaughan, “Designing input shapers using reinforcement learning,” in Proc. Annu. American Control Conf., Milwaukee, USA, 2018, pp. 228–233.
|
| [102] |
S. M. Fasih ur Rehman, Z. Mohamed, A. R. Husain, H. I. Jaafar, M. H. Shaheed, and M. A. Abbasi, “Input shaping with an adaptive scheme for swing control of an underactuated tower crane under payload hoisting and mass variations,” Mech. Syst. Signal Process., vol. 175, p. 109106, Aug. 2022. doi: 10.1016/j.ymssp.2022.109106
|
| [103] |
T. Zhang, Z. Kang, Y. Zou, and C. Liao, “Deep neural network input shaper for residual vibration suppression,” J. South China Univ. Technol. (Nat. Sci. Ed.), vol. 49, no. 8, pp. 103–112, Aug. 2021.
|
| [104] |
L. Ramli, Z. Mohamed, M. Ö. Efe, I. M. Lazim, and H. I. Jaafar, “Efficient swing control of an overhead crane with simultaneous payload hoisting and external disturbances,” Mech. Syst. Signal Process., vol. 135, p. 106326, Jan. 2020. doi: 10.1016/j.ymssp.2019.106326
|
| [105] |
C. Bergeling, R. Pates, and A. Rantzer, “H-infinity optimal control for systems with a bottleneck frequency,” IEEE Trans. Autom. Control, vol. 66, no. 6, pp. 2732–2738, Jun. 2021. doi: 10.1109/TAC.2020.3010263
|
| [106] |
S. Nithi-Uthai and W. Chatlatanagulchai, “Improved backstepping controller for rigid-flexible system using input shaping reference model matching and neural network,” in Proc. 58th Ann. Conf. Society of Instrument and Control Engineers of Japan, Hiroshima, Japan, 2019, pp. 1024–1029.
|
| [107] |
J. Xu, J. Cao, and Y. Zhang, “Vibration suppression of picking device with improved input shaping algorithm,” J. Northeast For. Univ., vol. 48, no. 12, pp. 79–84, Dec. 2020.
|
| [108] |
T. Zhang, H. Chu, Y. Zou, and T. Liu, “A deep reinforcement learning-based optimization method for vibration suppression of articulated robots,” Eng. Optim., vol. 55, no. 7, pp. 1189–1206, May 2023. doi: 10.1080/0305215X.2022.2065482
|
| [109] |
L. Chen and X. Luo, “Tensor distribution regression based on the 3D conventional neural networks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 7, pp. 1628–1630, Jul. 2023. doi: 10.1109/JAS.2023.123591
|
| [110] |
K. Yin, H. Wang, L. Zhong, T. Zhang, J. Ye, and Y. La, “Research on feed forward force/position hybrid control strategy of robot flexible joint,” Mach. Tool Hydraul., vol. 50, no. 11, pp. 25–34, Jun. 2022.
|
| [111] |
Y. Zou, T. Liu, T. Zhang, and H. Chu, “A learning trajectory planning for vibration suppression of industrial robot,” Ind. Rob., vol. 50, no. 5, pp. 861–869, May 2023. doi: 10.1108/IR-02-2023-0013
|
| [112] |
T. Zhang, K. Lin, and A. Zhang, “Research on flexible dynamics of a 6-DOF industrial robot and residual vibration control with a pre-adaptive input shaper,” J. Mech. Sci. Technol., vol. 33, no. 4, pp. 1875–1889, Apr. 2019. doi: 10.1007/s12206-019-0340-z
|
| [113] |
R. Jallouli-Khlif, B. Maalej, P. Melchior, and N. Derbel, “Control of prosthetic hand based on input shaping combined to fractional PI controller,” in Proc. 9th Int. Conf. Systems and Control, Caen, France, 2021, pp. 449–454.
|
| [114] |
L. Li, Q. Zhang, T. Zhang, and Y. Zou, “Vibration suppression of ball-screw drive system based on flexible dynamics model,” Eng. Appl. Artif. Intell., vol. 117, p. 105506, Jan. 2023. doi: 10.1016/j.engappai.2022.105506
|
| [115] |
A. Mohammed, H. Altuwais, and K. Alghanim, “An optimized shaped command of overhead crane nonlinear system for rest-to-rest maneuver,” J. Eng. Res., vol. 11, no. 4, pp. 548–554, Dec. 2023. doi: 10.1016/j.jer.2023.08.012
|
| [116] |
P. Jia, Y. Zhou, and X. Li, “Vibration control of a flexible joint manipulator based on off-line learning input shaping,” J. Vib. Shock, vol. 37, no. 13, pp. 177–181, May 2018.
|
| [117] |
S. Patel and W. Weaver, “Input shaping control of paralleled DC-DC converters,” in Proc. IEEE Energy Conversion Congr. Expo., Detroit, USA, 2020, pp. 2619–2624.
|
| [118] |
Z. Pásztori, F. Ruggiero, V. Lippiello, and M. D. Castro, “Bayesian optimization approach to input shaper design for flexible beam vibration suppression,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 9150–9156, Jan. 2020. doi: 10.1016/j.ifacol.2020.12.2159
|
| [119] |
X. Zhang, Q. Zong, B. Tian, and W. Liu, “Continuous robust fault-tolerant control and vibration suppression for flexible spacecraft without angular velocity,” Int. J. Robust Nonlinear Control, vol. 29, no. 12, pp. 3915–3935, Aug. 2019. doi: 10.1002/rnc.4584
|
| [120] |
L. Hu, S. Yang, X. Luo, H. Yuan, K. Sedraoui, and M. C. Zhou, “A distributed framework for large-scale protein-protein interaction data analysis and prediction using MapReduce,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 160–172, Jan. 2022. doi: 10.1109/JAS.2021.1004198
|
| [121] |
X. Miao, L. Yang, and H. Ouyang, “Artificial-neural-network-based optimal Smoother design for oscillation suppression control of underactuated overhead cranes with distributed mass beams,” Mech. Syst. Signal Process., vol. 200, p. 110497, Oct. 2023. doi: 10.1016/j.ymssp.2023.110497
|
| [122] |
A. Al-Fadhli and E. Khorshid, “A smooth optimized input shaping method for two-dimensional crane systems using Bezier curves,” Trans. Inst. Meas. Control, vol. 43, no. 11, pp. 2512–2524, Apr. 2021. doi: 10.1177/0142331221995305
|
| [123] |
T. Chen, Y. Wang, H. Wen, and J. Kang, “Autonomous assembly of multiple flexible spacecraft using RRT* algorithm and input shaping technique,” Nonlinear Dyn., vol. 111, no. 12, pp. 11223–11241, Apr. 2023. doi: 10.1007/s11071-023-08445-3
|
| [124] |
W. Chen, K.-S. Chen, and M.-C. Tsai, “Finite element input shaping design for vibration suppression of mechatronics systems,” in Proc. IEEE Int. Conf. Mechatronics, Ilmenau, Germany, 2019, pp. 37–42.
|
| [125] |
D. K. Thomsen, R. Søe-Knudsen, D. Brandt, and X, Zhang, “Experimental implementation of time-varying input shaping on UR robots,” in Proc. 16th Int. Conf. Informatics in Control, Automation and Robotics, Prague, Czech Republic, 2019, pp. 488–498.
|
| [126] |
P. P. Sahoo and W. Singhose, “Effects of input shaping on impact loads during collisions involving flexible robots,” in Proc. IEEE 14th Int. Conf. Control and Autom., Anchorage, USA, 2018, pp. 1004–1009.
|
| [127] |
D. Wu and X. Luo, “Robust latent factor analysis for precise representation of high-dimensional and sparse data,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 4, pp. 796–805, Apr. 2021. doi: 10.1109/JAS.2020.1003533
|
| [128] |
S. Arabasi and Z. Masoud, “Frequency-modulation input-shaping strategy for double-pendulum overhead cranes undergoing simultaneous hoist and travel maneuvers,” IEEE Access, vol. 10, pp. 44954–44963, Apr. 2022. doi: 10.1109/ACCESS.2022.3170099
|
| [129] |
Y. Shi, W. Zhao, S. Li, B. Li, and X. Sun, “Novel discrete-time recurrent neural network for robot manipulator: A direct discretization technical route,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 6, pp. 2781–2790, Jun. 2023. doi: 10.1109/TNNLS.2021.3108050
|
| [130] |
G.-Y. Jung, S.-B. Choi, and G.-W. Kim, “Series Ni-Ti shape memory alloy wires with different martensitic-austenitic phase transformation temperatures as an actuator for input shaping control,” Smart Mater. Struct., vol. 28, no. 7, p. 77001, May 2019. doi: 10.1088/1361-665X/ab1941
|
| [131] |
A. Al-Fadhli and E. Khorshid, “Payload oscillation control of tower crane using smooth command input,” J. Vib. Control, vol. 29, no. 3–4, pp. 902–915, Feb. 2023. doi: 10.1177/10775463211054640
|
| [132] |
W. Kim, Y. Shin, T. Kim, and C.-G. Kang, “Modeling analysis for system parameters of a vertical input shaping control apparatus,” in Proc. 12th Asian Control Conf., Kitakyushu, Japan, 2019, pp. 1205–1209.
|
| [133] |
J. Cao, M. Yang, and D. Xu, “Supression of vibration of AC servo system based on input shaping technique,” in Proc. 21st Int. Conf. Electrical Machines and Systems, Jeju, South Korea, 2018, pp. 2593–2597.
|
| [134] |
X. Li, Z. Xu, S. Li, Z. Su, and X. Zhou, “Simultaneous obstacle avoidance and target tracking of multiple wheeled mobile robots with certified safety,” IEEE Trans. Cybern., vol. 52, no. 11, pp. 11859–11873, Nov. 2022. doi: 10.1109/TCYB.2021.3070385
|
| [135] |
K. A. Alhazza, Z. N. Masoud, and J. A. Alqabandi, “A close-form command shaping control for point-to-point maneuver with nonzero initial and final conditions,” Mech. Syst. Signal Process., vol. 170, p. 108804, May 2022. doi: 10.1016/j.ymssp.2022.108804
|
| [136] |
L. Jin, X. Zheng, and X. Luo, “Neural dynamics for distributed collaborative control of manipulators with time delays,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 854–863, May 2022. doi: 10.1109/JAS.2022.105446
|
| [137] |
G. Jin and M. Deng, “Operator-based robust nonlinear free vibration control of a flexible plate with unknown input nonlinearity,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 442–450, Mar. 2020. doi: 10.1109/JAS.2020.1003042
|
| [138] |
T. Rome, W. Singhose, K. Dobson, K. Sorensen, F. Schlagenhauf, and J.-W. Kang, “Impact of input shaper discretization on linear resonant actuators for haptic feedback,” in Proc. IEEE 31st Int. Symp. Industrial Electronics, Anchorage, USA, 2022, pp. 194–199.
|
| [139] |
Y. Yuan, J. Li, and X. Luo, “A fuzzy PID-incorporated stochastic gradient descent algorithm for fast and accurate latent factor analysis,” IEEE Trans. Fuzzy Systems, vol. 32, no. 7, pp. 4049–4061, Jul. 2024.
|
| [140] |
G. Chen, L. Zhu, W. Zheng, and C. Wang, “Vibration suppression in a two-mass drive system using three input shaping — Comparative study,” in Proc. Int. Conf. Computing, Electronics & Communications Engineering, Swansea, UK, 2023, pp. 68–73.
|
| [141] |
C. Li, X. Huo, and Q. Liu, “A new robust command shaping method and its application in quadrotor slung system with varying parameters,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 5737–5742, Jan. 2020. doi: 10.1016/j.ifacol.2020.12.1603
|
| [142] |
X. Cao and S. Li, “A novel dynamic neural system for nonconvex portfolio optimization with cardinality restrictions,” IEEE Trans. Syst., Man, Cybern.: Syst., vol. 53, no. 11, pp. 6943–6952, Nov. 2023. doi: 10.1109/TSMC.2023.3288224
|
| [143] |
J.-H. Montonen, N. Nevaranta, M. Niemelä, and T. Lindh, “Comparison of extrainsensitive input shaping and swing-angle-estimation-based slew control approaches for a tower crane,” Appl. Sci., vol. 12, no. 12, p. 5945, Jun. 2022. doi: 10.3390/app12125945
|
| [144] |
G. Peláez, J. Vaugan, P. Izquierdo, H. Rubio, and J. C. García-Prada, “Dynamics and embedded internet of things input shaping control for overhead cranes transporting multibody payloads,” Sensors, vol. 18, no. 6, p. 1817, Jun. 2018. doi: 10.3390/s18061817
|
| [145] |
A. Bhayadia, A. Olivett, T. Singh, and M. A. Karami, “Input shaping for travelling wave generation,” Smart Mater. Struct., vol. 31, no. 5, p. 055006, Mar. 2022. doi: 10.1088/1361-665X/ac5c89
|
| [146] |
Y. Zhang, S. Li, and G. Geng, “Initialization-based k-winners-take-all neural network model using modified gradient descent,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 8, pp. 4130–4138, Aug. 2023. doi: 10.1109/TNNLS.2021.3123240
|
| [147] |
B. Lu, Z. Wu, Y.-C. Fang, and N. Sun, “Input shaping control for underactuated dual overhead crane system with holonomic constraints,” Control Theory Appl., vol. 35, no. 12, pp. 1805–1811, Dec. 2018.
|
| [148] |
X. Luo, H. Wu, Z. Wang, J. Wang, and D. Meng, “A novel approach to large-scale dynamically weighted directed network representation,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 12, pp. 9756–9773, Dec. 2022. doi: 10.1109/TPAMI.2021.3132503
|
| [149] |
Y. Shi, J. Wang, S. Li, B. Li, and X. Sun, “Tracking control of cable-driven planar robot based on discrete-time recurrent neural network with immediate discretization method,” IEEE Trans. Ind. Inf., vol. 19, no. 6, pp. 7414–7423, Jun. 2023. doi: 10.1109/TII.2022.3210255
|
| [150] |
C. Zhu, B. Chen, M. Zhang, and G.-A. Tang, “Suppression of spacecraft vibration excitation during attitude adjustment with input shaping using drive assembly,” Manned Spaceflight, vol. 24, no. 4, pp. 488–493, Aug. 2018.
|
| [151] |
X. Zhang, Q. Zong, L. Dou, B. Tian, and W. Liu, “Finite-time attitude maneuvering and vibration suppression of flexible spacecraft,” J. Franklin Inst., vol. 357, no. 16, pp. 11604–11628, Nov. 2020. doi: 10.1016/j.jfranklin.2019.09.003
|
| [152] |
S. Jia and J. Shan, “Vibration control of gyroelastic spacecraft using input shaping and angular momentum devices,” Acta Astronaut., vol. 159, pp. 397–409, Jun. 2019. doi: 10.1016/j.actaastro.2019.03.062
|
| [153] |
H. Wu, X. Luo, M. C. Zhou, M. J. Rawa, K. Sedraoui, and A. Albeshri, “A PID-incorporated latent factorization of tensors approach to dynamically weighted directed network analysis,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 533–546, Mar. 2022. doi: 10.1109/JAS.2021.1004308
|
| [154] |
S. Baklouti, E. Courteille, P. Lemoine, and S. Caro, “Input shaping for feed-forward control of cable-driven parallel robots,” J. Dyn. Syst., Meas., Control, vol. 143, no. 2, p. 021007, Feb. 2021. doi: 10.1115/1.4048354
|
| [155] |
W. Zhu, Q. Zong, and B. Tian, “Adaptive tracking and command shaped vibration control of flexible spacecraft,” IET Control Theory Appl., vol. 13, no. 8, pp. 1121–1128, May 2019. doi: 10.1049/iet-cta.2018.5051
|
| [156] |
Y. Yang, L. Liao, H. Yang, and S. Li, “An optimal control strategy for multi-UAVs target tracking and cooperative competition,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1931–1947, Dec. 2021. doi: 10.1109/JAS.2020.1003012
|
| [157] |
K. Alghanim, A. Alfadhli, A. Alshehemah, and A. Mohammed, “Crane systems performance optimization through harmonic input shaper,” Int. J. Dyn. Control, vol. 12, no. 6, pp. 1788–1800, Jun. 2024. doi: 10.1007/s40435-023-01321-3
|
| [158] |
A. Stein and T. Singh, “Minimum time control of a gantry crane system with rate constraints,” Mech. Syst. Signal Process., vol. 190, p. 110120, May 2023. doi: 10.1016/j.ymssp.2023.110120
|
| [159] |
Z. Liu, G. Yuan, and X. Luo, “Symmetry and nonnegativity-constrained matrix factorization for community detection,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 9, pp. 1691–1693, Sep. 2022. doi: 10.1109/JAS.2022.105794
|
| [160] |
T. Zhang and G. Liu, “Predictive tracking control of network-based agents with communication delays,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 6, pp. 1150–1156, Nov. 2018. doi: 10.1109/JAS.2017.7510868
|
| [161] |
H. D. Tho, K. Terashima, and T. Miyoshi, “Vibration control of an overhead crane with hoisting motion using input shaping technique,” in Proc. American Control Conf., Atlanta, USA, 2022, pp. 1910–1914.
|
Figures(2) / Tables(8)






 DownLoad:
DownLoad: