A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation

IEEE/CAA Journal of Automatica Sinica
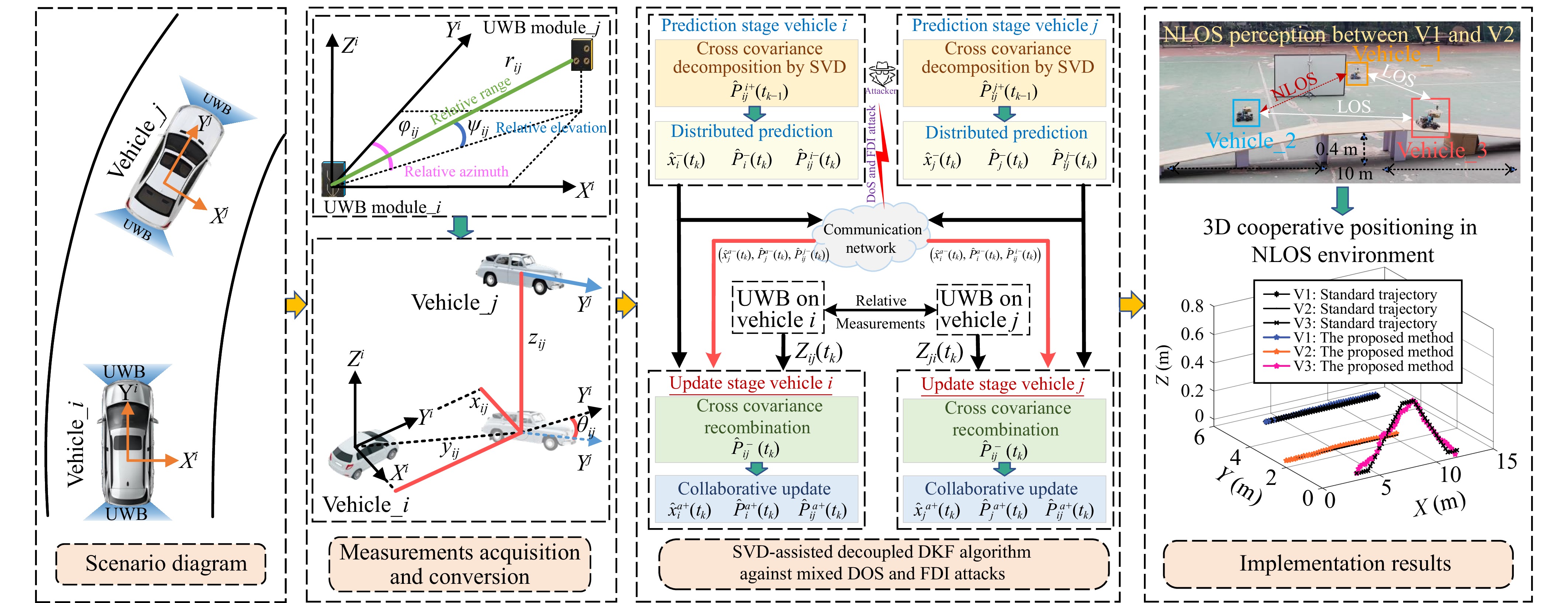
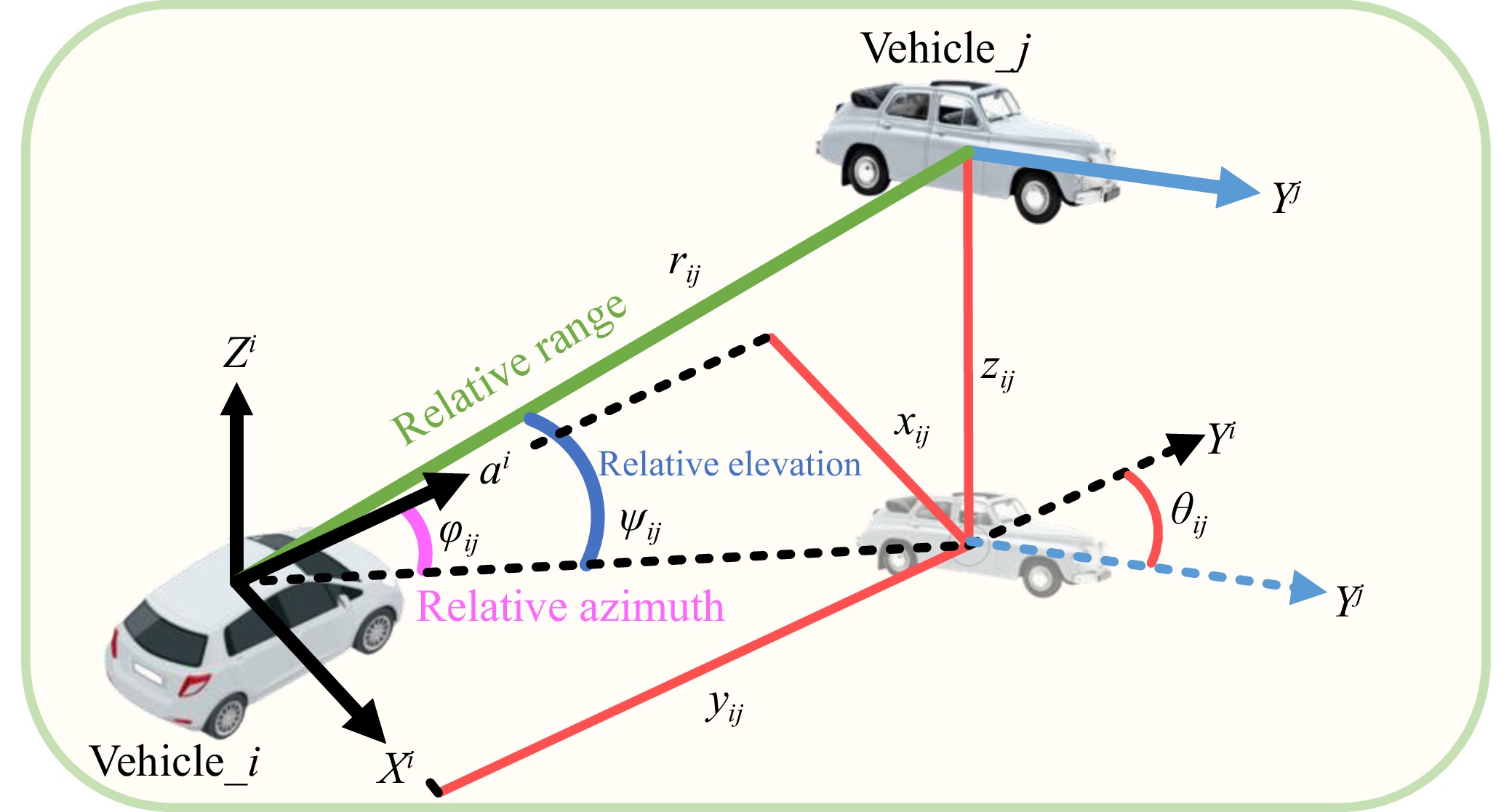
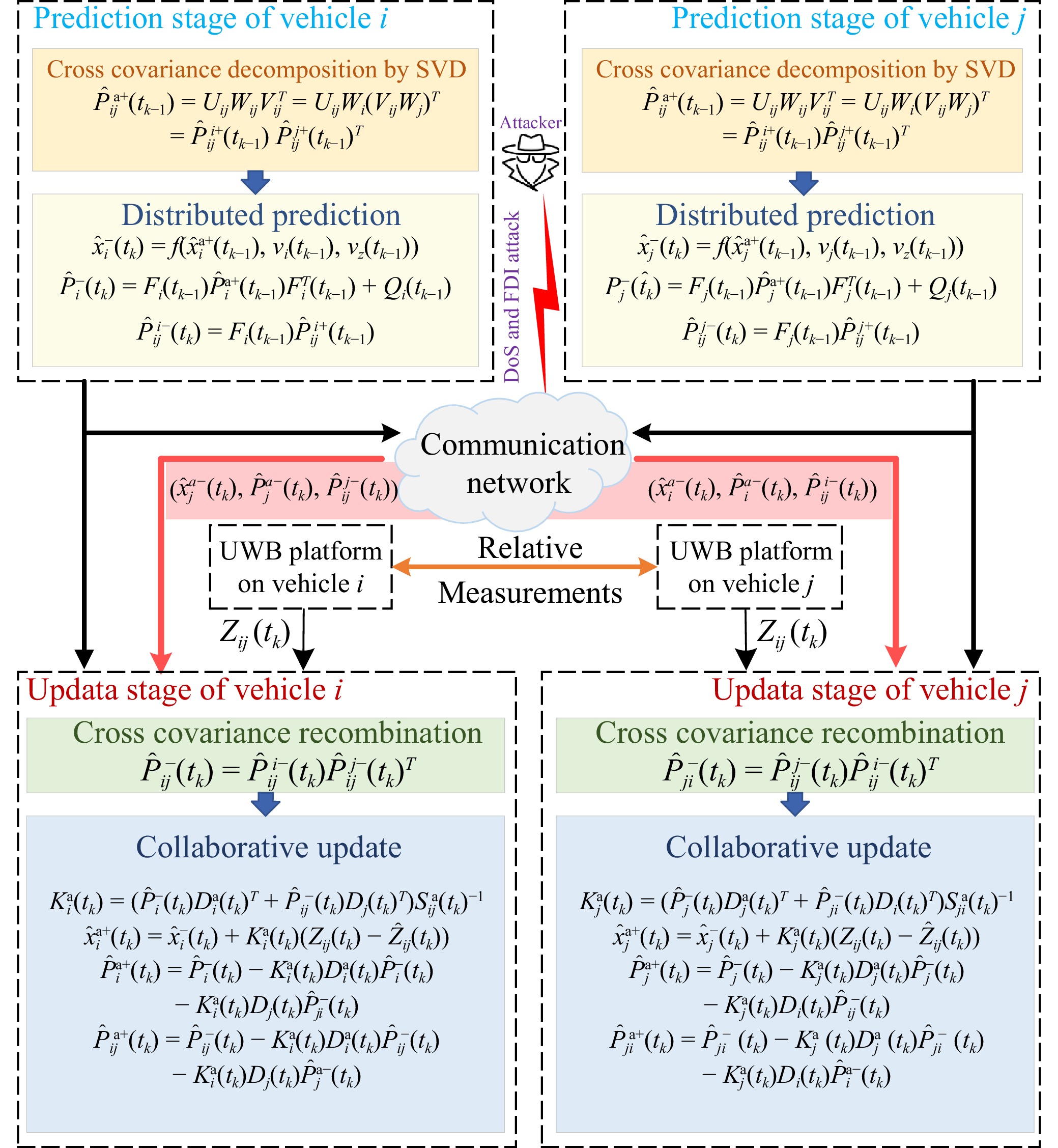
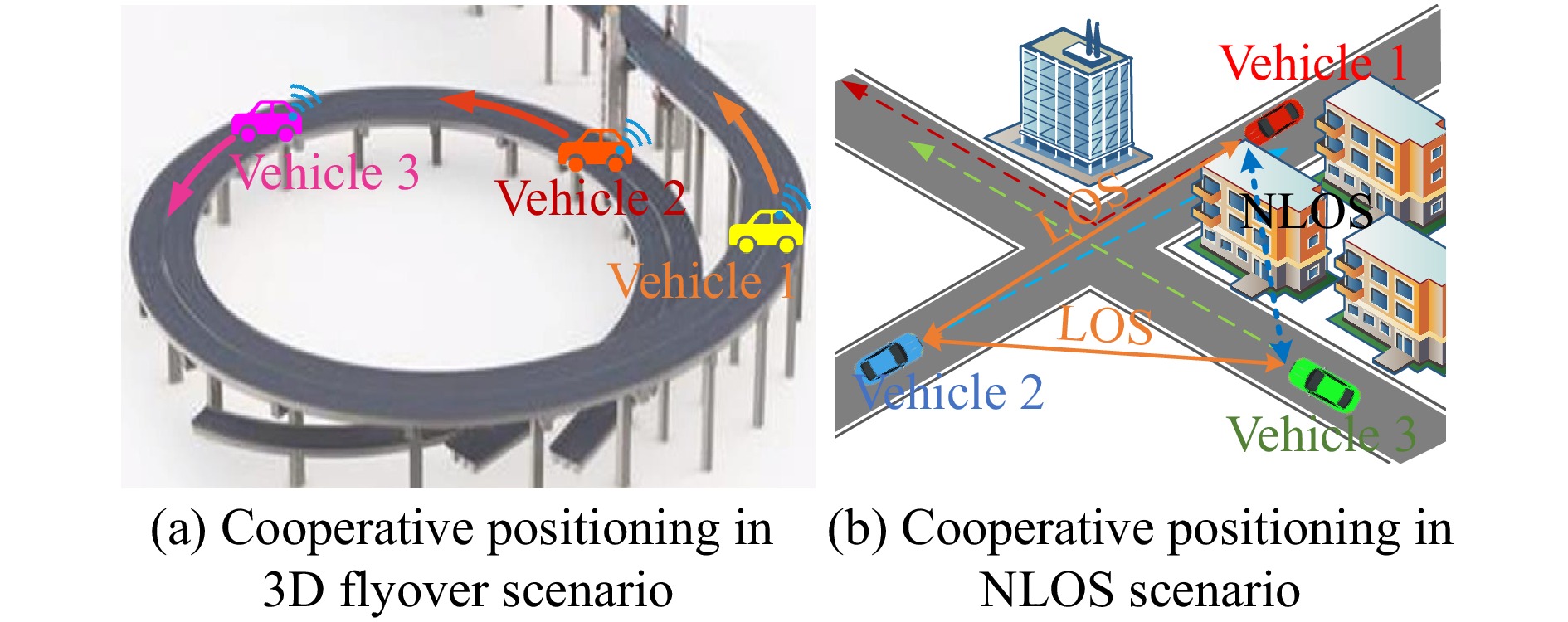
| Citation: | Z. Zhang, H. Qin, D. Huang, X. Fang, M. Zhou, and S. Guo, “From singleton to collaboration: Robust 3D cooperative positioning for intelligent connected vehicles based on hybrid range-azimuth-elevation under zero-trust driving environments,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 1, pp. 1–18, Jan. 2025.

|

| [1] |
C. Zu, C. Yang, J. Wang, W. Gao, D. Cao, and F.-Y. Wang, “Simulation and field testing of multiple vehicles collision avoidance algorithms,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1045–1063, Jul. 2020. doi: 10.1109/JAS.2020.1003246
|
| [2] |
Y. Ma, Z. Wang, H. Yang, and L. Yang, “Artificial intelligence applications in the development of autonomous vehicles: A survey,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 315–329, Mar. 2020. doi: 10.1109/JAS.2020.1003021
|
| [3] |
D. Huang, Y. Na, Y. Liu, Z. Zhang, and B. Mi, “Overview of cooperative fault-tolerant control driven by the full information chain of intelligent connected vehicle platoons under the zero-trust framework: Opportunities and challenges,” IEEE Intell. Transp. Syst. Mag., vol. 16, no. 1, pp. 22–39, Jan.–Feb. 2024. doi: 10.1109/MITS.2023.3319344
|
| [4] |
F. M. Ortiz, M. Sammarco, L. H. M. K. Costa, and M. Detyniecki, “Applications and services using vehicular exteroceptive sensors: A survey,” IEEE Trans. Intell. Veh., vol. 8, no. 1, pp. 949–969, Jan. 2023. doi: 10.1109/TIV.2022.3182218
|
| [5] |
H.-M. Cheng and D. Song, “Graph-based proprioceptive localization using a discrete heading-length feature sequence matching approach,” IEEE Trans. Robot., vol. 37, no. 4, pp. 1268–1281, Aug. 2021. doi: 10.1109/TRO.2020.3046419
|
| [6] |
R. Karlsson and F. Gustafsson, “The future of automotive localization algorithms: Available, reliable, and scalable localization: Anywhere and anytime,” IEEE Signal Process. Mag., vol. 34, no. 2, pp. 60–69, Mar. 2017. doi: 10.1109/MSP.2016.2637418
|
| [7] |
P. Yan, W. Wen, and L.-T. Hsu, “Integration of vehicle dynamic model and system identification model for extending the navigation service under sensor failures,” IEEE Trans. Intell. Veh., vol. 9, no. 1, pp. 2236–2248, Jan. 2024. doi: 10.1109/TIV.2023.3273185
|
| [8] |
G. Thandavarayan, M. Sepulcre, and J. Gozalvez, “Generation of cooperative perception messages for connected and automated vehicles,” IEEE Trans. Veh. Technol., vol. 69, no. 12, pp. 16336–16341, Dec. 2020. doi: 10.1109/TVT.2020.3036165
|
| [9] |
M. Rohani, D. Gingras, V. Vigneron, and D. Gruyer, “A new decentralized Bayesian approach for cooperative vehicle localization based on fusion of GPS and VANET based inter-vehicle distance measurement,” IEEE Intell. Transp. Syst. Mag., vol. 7, no. 2, pp. 85–95, Apr. 2015. doi: 10.1109/MITS.2015.2408171
|
| [10] |
N. Piperigkos, A. S. Lalos, K. Berberidis, and C. Anagnostopoulos, “Cooperative multi-modal localization in connected and autonomous vehicles,” in Proc. IEEE 3rd Connected and Automated Vehicles Symposium, Victoria, BC, Canada, 2020, pp. 1–5.
|
| [11] |
L. Yin, Q. Ni, and Z. Deng, “Intelligent multisensor cooperative localization under cooperative redundancy validation,” IEEE Trans. Cybern., vol. 51, no. 4, pp. 2188–2200, Apr. 2021. doi: 10.1109/TCYB.2019.2900312
|
| [12] |
A. K. Gostar, T. Rathnayake, R. Tennakoon, A. Bab-Hadiashar, G. Battistelli, L. Chisci, and R. Hoseinnezhad, “Centralized cooperative sensor fusion for dynamic sensor network with limited field-of-view via labeled multi-Bernoulli filter,” IEEE Trans. Signal Process., vol. 69, pp. 878–891, Dec. 2020.
|
| [13] |
Y. Wang, X. Wen, Y. Cao, C. Xu, and F. Gao, “Bearing-based relative localization for robotic swarm with partially mutual observations,” IEEE Robot. Automat. Lett., vol. 8, no. 4, pp. 2142–2149, Apr. 2023. doi: 10.1109/LRA.2023.3248378
|
| [14] |
F. Bounini, D. Gingras, H. Pollart, and D. Gruyer, “From simultaneous localization and mapping to collaborative localization for intelligent vehicles,” IEEE Intell. Transp. Syst. Mag., vol. 13, no. 4, pp. 196–216, Mar. 2020.
|
| [15] |
J. Xin, G. Xie, B. Yan, M. Shan, P. Li, and K. Gao, “Multimobile robot cooperative localization using ultrawideband sensor and GPU acceleration,” IEEE Trans. Autom. Sci. Eng., vol. 19, no. 4, pp. 2699–2710, Oct. 2022. doi: 10.1109/TASE.2021.3117949
|
| [16] |
K. Chen, G. Qi, Y. Li, and A. Sheng, “Cooperative localization and circumnavigation of multiple targets with bearing-only measurements,” J. Franklin Inst., vol. 360, no. 12, pp. 9159–9179, Aug. 2023. doi: 10.1016/j.jfranklin.2022.09.039
|
| [17] |
T. Wang, K. Hu, Z. Li, K. Lin, J. Wang, and Y. Shen, “A semi-supervised learning approach for UWB ranging error mitigation,” IEEE Wireless Commun. Lett., vol. 10, no. 3, pp. 688–691, Mar. 2021. doi: 10.1109/LWC.2020.3046531
|
| [18] |
A. G. Ferreira, D. Fernandes, S. Branco, A. P. Catarino, and J. L. Monteiro, “Feature selection for real-time NLOS identification and mitigation for Body-mounted UWB transceivers,” IEEE Trans. Instrum. Meas., vol. 70, pp. 1–10, Apr. 2021.
|
| [19] |
X. Jin, W. M. Haddad, and T. Yucelen, “An adaptive control architecture for mitigating sensor and actuator attacks in cyber-physical systems,” IEEE Trans. Autom. Control, vol. 62, no. 11, pp. 6058–6064, Nov. 2017. doi: 10.1109/TAC.2017.2652127
|
| [20] |
W. Duo, M. Zhou, and A. Abusorrah, “A survey of cyber attacks on cyber physical systems: Recent advances and challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 784–800, May 2022. doi: 10.1109/JAS.2022.105548
|
| [21] |
G. Franzè, W. Lucia, and F. Tedesco, “Resilient model predictive control for constrained cyber-physical systems subject to severe attacks on the communication channels,” IEEE Trans. Autom. Control, vol. 67, no. 4, pp. 1822–1836, Apr. 2022. doi: 10.1109/TAC.2021.3084237
|
| [22] |
J. Huang, Y. Tang, W. Yang, and F. Li, “Resilient consensus-based distributed filtering: Convergence analysis under stealthy attacks,” IEEE Trans. Ind. Inform., vol. 16, no. 7, pp. 4878–4888, Jul. 2020. doi: 10.1109/TII.2019.2960042
|
| [23] |
X. He, X. Ren, H. Sandberg, and K. H. Johansson, “How to secure distributed filters under sensor attacks,” IEEE Trans. Autom. Control, vol. 67, no. 6, pp. 2843–2856, Jun. 2022. doi: 10.1109/TAC.2021.3092603
|
| [24] |
Y. Shoukry and P. Tabuada, “Event-triggered state observers for sparse sensor noise/attacks,” IEEE Trans. Autom. Control, vol. 61, no. 8, pp. 2079–2091, Aug. 2016. doi: 10.1109/TAC.2015.2492159
|
| [25] |
Y. Liu and G.-H. Yang, “Event-triggered distributed state estimation for cyber-physical systems under DoS attacks,” IEEE Trans. Cybern., vol. 52, no. 5, pp. 3620–3631, May 2022. doi: 10.1109/TCYB.2020.3015507
|
| [26] |
T. K. Tasooji and H. J. Marquez, “A secure decentralized event-triggered cooperative localization in multi-robot systems under cyber attack,” IEEE Access, vol. 10, pp. 128101–128121, Dec. 2022. doi: 10.1109/ACCESS.2022.3227076
|
| [27] |
Y. Wang, Y. Yan, T. Shen, S. Bai, J. Hu, L. Xu, and G. Yin, “An event-triggered scheme for state estimation of preceding vehicles under connected vehicle environment,” IEEE Trans. Intell. Veh., vol. 8, no. 1, pp. 583–593, Jan. 2023. doi: 10.1109/TIV.2022.3181330
|
| [28] |
H. Lin, J. Lam, and Z. Wang, “Secure state estimation for systems under mixed cyber-attacks: Security and performance analysis,” Inf. Sci., vol. 546, pp. 943–960, Feb. 2021. doi: 10.1016/j.ins.2020.08.124
|
| [29] |
J. Strader, Y. Gu, J. N. Gross, M. De Petrillo, and J. Hardy, “Cooperative relative localization for moving UAVs with single link range measurements,” in Proc. IEEE/ION Position, Location and Navigation Symposium, Savannah, GA, USA, 2016, pp. 336–343.
|
| [30] |
A. Chakraborty, K. M. Brink, and R. Sharma, “Cooperative relative localization using range measurements without a priori information,” IEEE Access, vol. 8, pp. 205669–205684, Nov. 2020. doi: 10.1109/ACCESS.2020.3035470
|
| [31] |
K. Ansari, “Cooperative position prediction: beyond vehicle-to-vehicle relative positioning,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 3, pp. 1121–1130, Mar. 2020. doi: 10.1109/TITS.2019.2902572
|
| [32] |
T. K. Tasooji, S. Khodadadi, and H. J. Marquez, “Event-based secure consensus control for multirobot systems with cooperative localization against DoS attacks,” IEEE/ASME Trans. Mechatron., vol. 29, no. 1, pp. 715–729, Feb. 2024. doi: 10.1109/TMECH.2023.3270819
|
| [33] |
Y. Ma, Z. Nie, S. Hu, Z. Li, R. Malekian, and M. Sotelo, “Fault detection filter and controller co-design for unmanned surface vehicles under DoS attacks,” IEEE Trans. Intell. Transp. Syst., vol. 22, no. 3, pp. 1422–1434, Mar. 2021. doi: 10.1109/TITS.2020.2970472
|
| [34] |
X. Shan, A. Cabani, and H. Chafouk, “Cooperative localization based on GPS correction and EKF in urban environment,” in Proc. Int. Conf. Innovative Research in Applied Science, Engineering and Technology, Meknes, Morocco, 2022, pp. 1–8.
|
| [35] |
X. Tao, B. Zhu, S. Xuan, J. Zhao, H. Jiang, J. Du, and W. Deng, “A multi-sensor fusion positioning strategy for intelligent vehicles using global pose graph optimization,” IEEE Trans. Veh. Technol., vol. 71, no. 3, pp. 2614–2627, Mar. 2022. doi: 10.1109/TVT.2021.3139006
|
| [36] |
X. Ding, Z. Wang, and L. Zhang, “Event-triggered vehicle sideslip angle estimation based on low-cost sensors,” IEEE Trans. Ind. Inform., vol. 18, no. 7, pp. 4466–4476, Jul. 2022. doi: 10.1109/TII.2021.3118683
|
| [37] |
X. Xia, R. Xu, and J. Ma, “Secure cooperative localization for connected automated vehicles based on consensus,” IEEE Sensors J., vol. 23, no. 20, pp. 25061–25074, Oct. 2023. doi: 10.1109/JSEN.2023.3312610
|
| [38] |
L. Li, H. Yang, Y. Xia, and H. Yang, “Event-based distributed state estimation for linear systems under unknown input and false data injection attack,” Signal Process., vol. 170, pp. 1–14, May 2020.
|
| [39] |
W. Li, Y. Jia and J. Du, “Distributed kalman filter for cooperative localization with integrated measurements,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 4, pp. 3302–3310, Aug. 2020. doi: 10.1109/TAES.2019.2953372
|
| [40] |
T.-K. Chang, K. Chen, and A. Mehta, “Resilient and consistent multirobot cooperative localization with covariance intersection,” IEEE Trans. Robot., vol. 38, no. 1, pp. 197–208, Feb. 2022. doi: 10.1109/TRO.2021.3104965
|
| [41] |
C. D. Persis and P. Tesi, “Input-to-state stabilizing control under denial-of-service,” IEEE Trans. Autom. Control, vol. 60, no. 11, pp. 2930–2944, Nov. 2015. doi: 10.1109/TAC.2015.2416924
|
| [42] |
H. Gao, H. Dong, Z. Wang, and F. Han, “Recursive minimum-variance filter design for state-saturated complex networks with uncertain coupling strengths subject to deception attacks,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 11121–11132, Oct. 2022. doi: 10.1109/TCYB.2021.3067822
|
| [43] |
T. K. Tasooji and H. J. Marquez, “Event-triggered consensus control for multirobot systems with cooperative localization,” IEEE Trans. Ind. Electron., vol. 70, no. 6, pp. 5982–5993, Jun. 2023. doi: 10.1109/TIE.2022.3192673
|
| [44] |
J. Hu, Z. Wang, H. Gao, and L. K. Stergioulas, “Extended Kalman filtering with stochastic nonlinearities and multiple missing measurements,” Autom., vol. 48, no. 9, pp. 2007–2015, Mar. 2012. doi: 10.1016/j.automatica.2012.03.027
|
Figures(16)






 DownLoad:
DownLoad: