A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 8
Volume 12
Issue 8
IEEE/CAA Journal of Automatica Sinica
| Citation: | A. Benyahia, M. Stanković, R. Madonski, O. Babayomi, and S. Manojlović, “Improving control performance by cascading observers: Case of ADRC with cascade ESO,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 8, pp. 1702–1712, Aug. 2025. doi: 10.1109/JAS.2024.124995

|

| [1] |
J. Han, “From PID to active disturbance rejection control,” IEEE Trans. Ind. Electron., vol. 56, no. 3, pp. 900–906, 2009. doi: 10.1109/TIE.2008.2011621
|
| [2] |
E. Sariyildiz, R. Oboe, and K. Ohnishi, “Disturbance observer-based robust control and its applications: 35th anniversary overview,” IEEE Trans. Ind. Electron., vol. 67, no. 3, pp. 2042–2053, 2020. doi: 10.1109/TIE.2019.2903752
|
| [3] |
N. H. Jo, C. Jeon, and H. Shim, “Noise reduction disturbance observer for disturbance attenuation and noise suppression,” IEEE Trans. Ind. Electron., vol. 64, no. 2, pp. 1381–1391, 2017. doi: 10.1109/TIE.2016.2618858
|
| [4] |
H. K. Khalil, “Cascade high-gain observers in output feedback control,” Automatica, vol. 80, pp. 110–118, 2017. doi: 10.1016/j.automatica.2017.02.031
|
| [5] |
K. Łakomy and R. Madonski, “Cascade extended state observer for active disturbance rejection control applications under measurement noise,” ISA Transactions, vol. 109, pp. 1–10, 2021. doi: 10.1016/j.isatra.2020.09.007
|
| [6] |
K. Łakomy, R. Madonski, B. Dai, J. Yang, P. Kicki, M. Ansari, and S. Li, “Active disturbance rejection control design with suppression of sensor noise effects in application to DC-DC buck power converter,” IEEE Trans. Ind. Electron., vol. 69, no. 1, pp. 816–824, 2022. doi: 10.1109/TIE.2021.3055187
|
| [7] |
Z. Yan, S. Deng, Z. Yang, Y. Wang, Y. Lu, and X. Shi, “An ADRC strategy with sequential output stacking extended state observers to evaluate hydraulic torque for a continuous-wave pulse generator,” IEEE Trans. Ind. Inform., pp. 1–12, 2023.
|
| [8] |
H. Sun, R. Madonski, S. Li, Y. Zhang, and W. Xue, “Composite control design for systems with uncertainties and noise using combined extended state observer and Kalman filter,” IEEE Trans. Ind. Electron., vol. 69, no. 4, pp. 4119–4128, 2022. doi: 10.1109/TIE.2021.3075838
|
| [9] |
S. Ahmad and A. Ali, “On active disturbance rejection control in presence of measurement noise,” IEEE Trans. Ind. Electron., vol. 69, no. 11, pp. 11600–11610, 2022. doi: 10.1109/TIE.2021.3121754
|
| [10] |
O. Babayomi and Z. Zhang, “Model-free predictive control of power converters with cascade-parallel extended state observers,” IEEE Trans. Ind. Electron., vol. 70, no. 10, pp. 10215–10226, 2023. doi: 10.1109/TIE.2022.3217609
|
| [11] |
O. Babayomi and Z. Zhang, “Model-free predictive control of power converters with multifrequency extended state observers,” IEEE Trans. Ind. Electron., vol. 70, no. 11, pp. 11379–11389, 2023.
|
| [12] |
O. Babayomi, Z. Zhang, Z. Li, M. L. Heldwein, and J. Rodriguez, “Robust predictive control of grid-connected converters: Sensor noise suppression with parallel-cascade extended state observer,” IEEE Trans. Ind. Electron., vol. 71, no. 4, pp. 3728–3740, 2024. doi: 10.1109/TIE.2023.3279565
|
| [13] |
H. Cao, Y. Deng, Y. Zuo, H. Li, J. Wang, X. Liu, and C. H. T. Lee, “Unified interpretation of active disturbance rejection control for electrical drives,” IEEE Trans. Circuits Syst. Ⅱ: Express Br., 2024.
|
| [14] |
R. Madonski, G. Herbst, and M. Stankovic, “ADRC in output and error form: connection, equivalence, performance,” Control Theory and Technology, vol. 21, pp. 56–71, 2023. doi: 10.1007/s11768-023-00129-y
|
| [15] |
L. Zhang, J. Yang, and S. Li, “A model-based unmatched disturbance rejection control approach for speed regulation of a converter-driven dc motor using output-feedback,” IEEE/CAA J. Autom., vol. 9, no. 2, pp. 365–376, 2022. doi: 10.1109/JAS.2021.1004213
|
| [16] |
O. Babayomi, Z. Zhang, and Z. Li, “Model-free predictive control of DC-DC boost converters: Sensor noise suppression with hybrid extended state observers,” IEEE Trans. Power Electron., vol. 39, no. 1, pp. 245–259, 2024. doi: 10.1109/TPEL.2023.3321070
|
| [17] |
Y. Zuo, J. Chen, X. Zhu, and C. H. T. Lee, “Different active disturbance rejection controllers based on the same order GPI observer,” IEEE Trans. Ind. Electron., vol. 69, no. 11, pp. 10969–10983, 2022. doi: 10.1109/TIE.2021.3118378
|
| [18] |
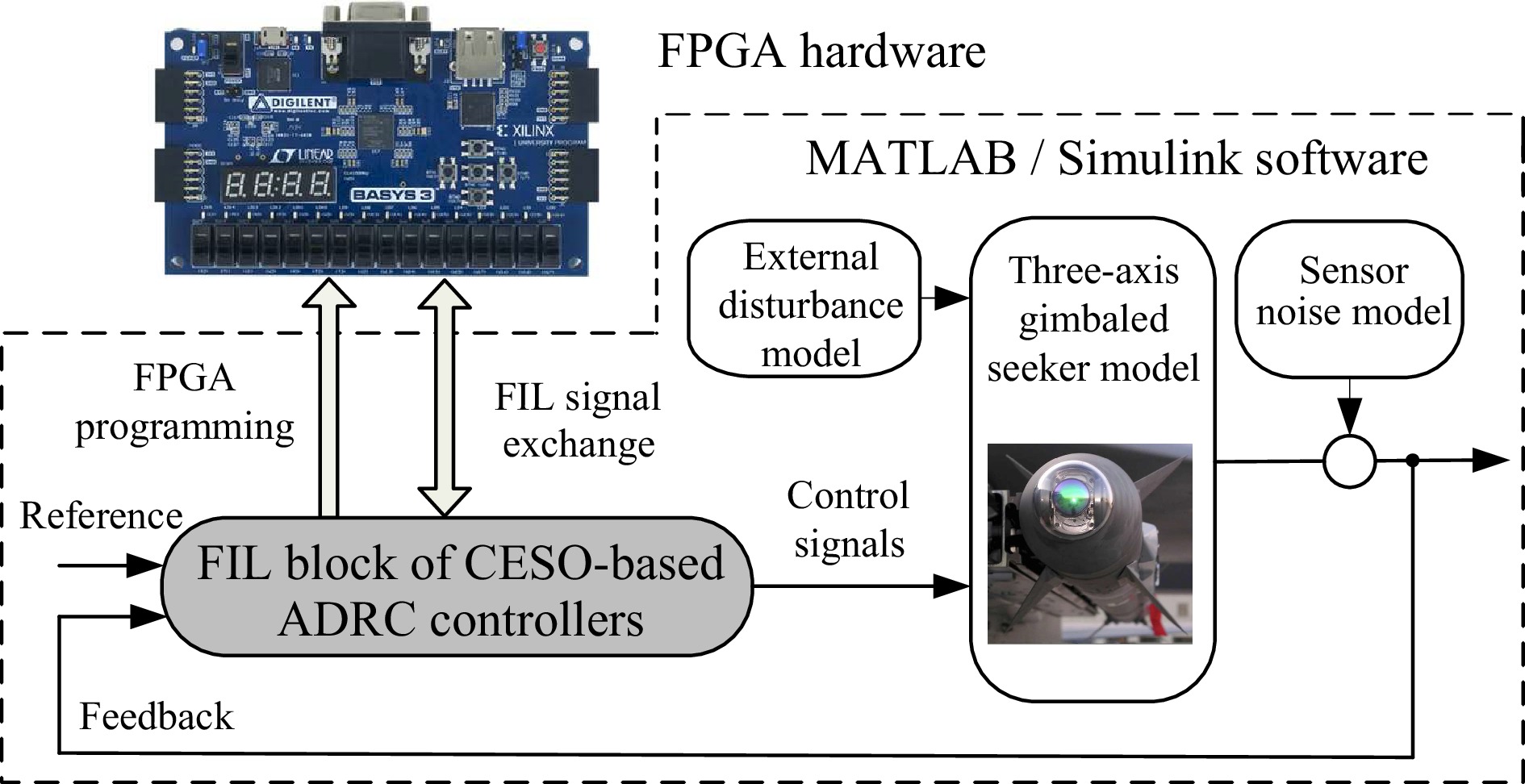
M. Stanković, S. M. Manojlović, S. M. Simić, S. T. Mitrović, and M. B. Naumović, “FPGA system-level based design of multi-axis ADRC controller,” Mechatronics, vol. 40, pp. 146–155, 2016. doi: 10.1016/j.mechatronics.2016.10.005
|
Figures(9) / Tables(7)







 DownLoad:
DownLoad: