A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 12
Volume 11
Issue 12
IEEE/CAA Journal of Automatica Sinica
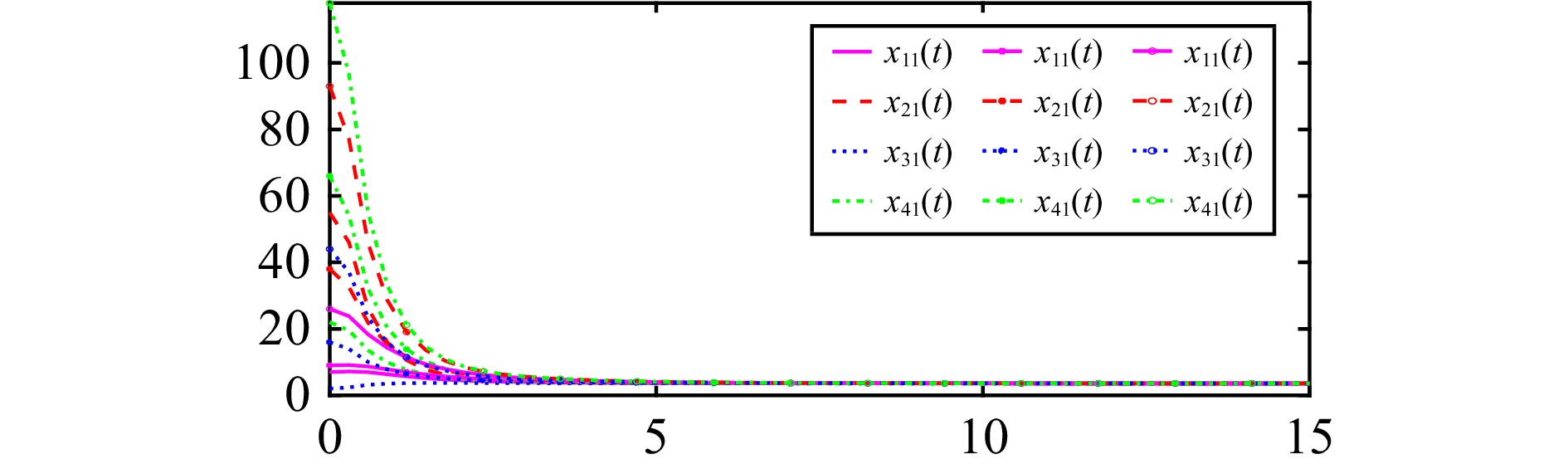
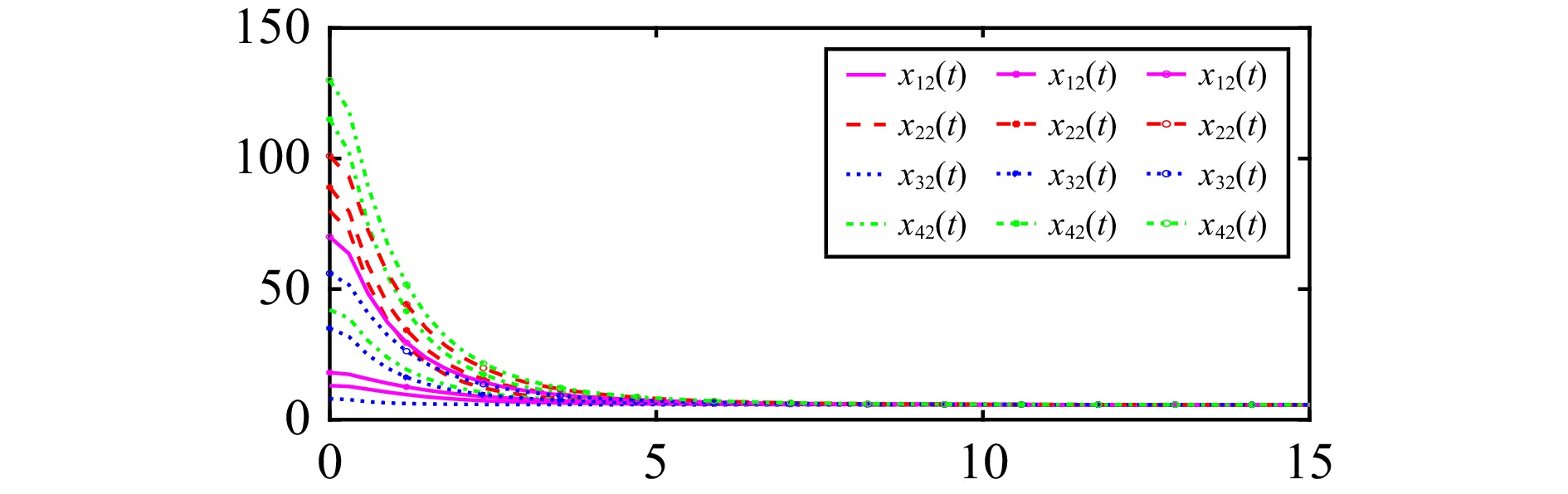
| Citation: | J. Zhang, F. Lin, S. Ding, and W. Xing, “Linear programming-based consensus of positive continuous-time multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 12, pp. 2519–2521, Dec. 2024. doi: 10.1109/JAS.2024.124716

|

| [1] |
F. Zhu, Y. Zhao, Y. Fu, et al., “Observer-based output consensus control scheme for strict-feedback nonlinear multi-agent systems with disturbances,” IEEE Trans. Network Science and Engineering, vol. 11, no. 3, pp. 2621–2631, 2023. doi: 10.1109/TNSE.2023.3346442
|
| [2] |
V. K. Singh, S. Kamal, S. Ghosh, et al., “Neuroadaptive prescribed-time consensus of uncertain nonlinear multi-agent systems,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 71, no. 1, pp. 296–300, 2023.
|
| [3] |
Z. Li, Z. Duan, G. Chen, et al., “Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint,” IEEE Trans. Circuits and Systems I: Regular Papers, vol. 57, no. 1, pp. 213–224, 2010. doi: 10.1109/TCSI.2009.2023937
|
| [4] |
L. Farina and S. Rinaldi. Positive Linear Systems: Theory and Applications. New York, USA: Wiley, 2000.
|
| [5] |
F. Knorn, O. Mason, and R. Shorten, “On linear co-positive Lyapunov functions for sets of linear positive systems,” Automatica, vol. 45, no. 8, pp. 1943–1947, 2009. doi: 10.1016/j.automatica.2009.04.013
|
| [6] |
M. A. Rami, F. Tadeo, and U. Helmke, “Positive observers for linear positive systems, and their implications,” Int. J. Control, vol. 84, no. 4, pp. 716–725, 2011. doi: 10.1080/00207179.2011.573000
|
| [7] |
J. Zhang, L. Ma, Q. Wang, et al., “Improved controller design for positive systems and its application to positive switched systems,” in Positive Systems: Theory and Applications, Cham, Switzerland: Springer, 2017, pp. 139–148.
|
| [8] |
J. J. R. Liu, N. Yang, K. W. Kwok, et al., “Positive consensus of directed multiagent systems,” IEEE Trans. Autom. Control, vol. 67, no. 7, pp. 3641–3646, 2022. doi: 10.1109/TAC.2021.3108517
|
| [9] |
A. Rantzer, “On the Kalman-Yakubovich-Popov lemma for positive systems,” IEEE Trans. Autom. Control, vol. 61, no. 5, pp. 1346–1349, 2016. doi: 10.1109/TAC.2015.2465571
|
| [10] |
S. Xiao, X. Ge, Q. Han, and Y. Zhang, “Distributed resilient estimator design for positive systems under topological attacks,” IEEE Trans. Cybern, vol. 51, no. 7, pp. 3676–3686, 2021. doi: 10.1109/TCYB.2020.2981646
|
| [11] |
A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mobile autonomous agents using nearest neighbor rules,” IEEE Trans. Autom. Control, vol. 48, no. 6, pp. 988–1001, 2003. doi: 10.1109/TAC.2003.812781
|
| [12] |
W. Ren and E. Atkins, “Distributed multi-vehicle coordinated control via local information exchange,” Int. J. Robust and Nonlinear Control: IFAC-Affiliated J., vol. 17, no. 10−11, pp. 1002–1033, 2007.
|
| [13] |
M. E. Valcher and P. Misra, “On the stabilizability and consensus of positive homogeneous multi-agent dynamical systems,” IEEE Trans. Autom. Control, vol. 59, no. 7, pp. 1936–1941, 2014. doi: 10.1109/TAC.2013.2294621
|
| [14] |
H. Wu and H. Su, “Observer-based consensus for positive multiagent systems with directed topology and nonlinear control input,” IEEE Trans. Systems, Man, and Cybern: Systems, vol. 49, no. 7, pp. 1459–1469, 2019. doi: 10.1109/TSMC.2018.2852704
|
| [15] |
S. Bhattacharyya and S. Patra, “Positive consensus of multi-agent systems with hierarchical control protocol,” Automatica, vol. 139, p. 110191, 2022. doi: 10.1016/j.automatica.2022.110191
|
| [16] |
Z. Qu. Cooperative Control of Dynamical Systems: Applications to Autonomous Vehicles. Berlin, Germany: Springer Science & Business Media, 2009.
|
| [17] |
S. Wang, Q. Zhao, M. Huang, et al., “Linear programming-based fault detection and consensus control of positive multi-agent systems,” in Proc. IEEE 6th PP. Int. Conf. Pattern Recognition and Artificial Intelligence, 2023, 926−931.
|
Figures(4)






 DownLoad:
DownLoad: