

Figure
1.
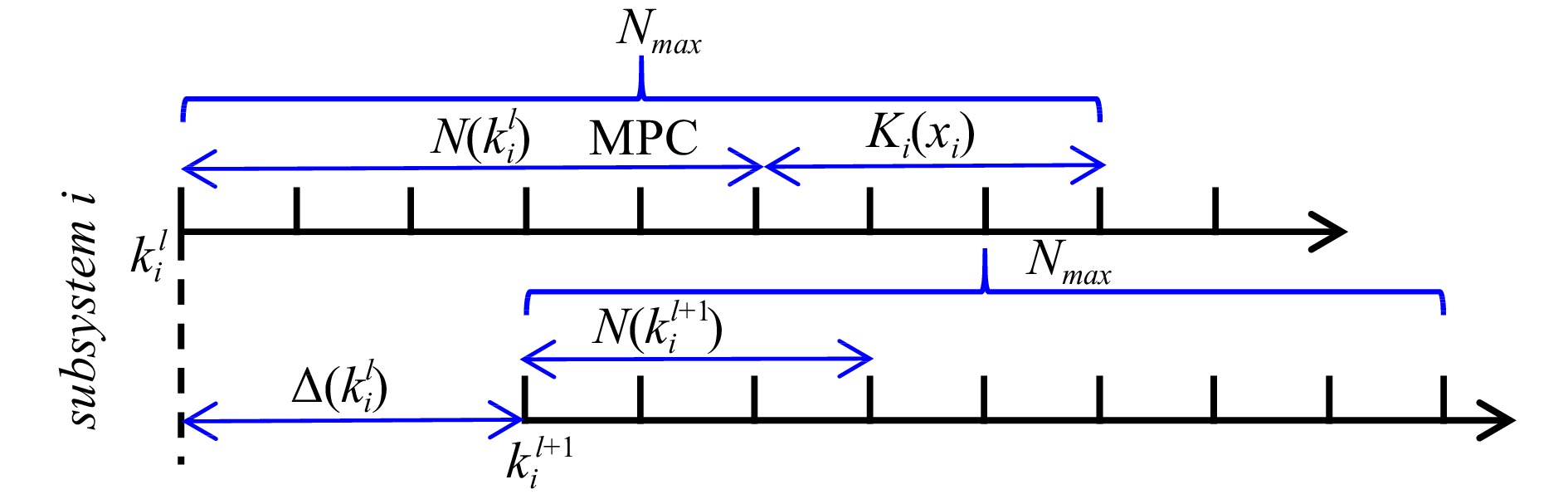
Illustration of Nmax, N(kli), and Δ(kli).

IEEE/CAA Journal of Automatica Sinica
| Citation: | R. Guo, J. Feng, J. Wang, and Y. Zhao, “Event-triggered adaptive horizon DMPC for discrete-time coupled nonlinear systems,” IEEE/CAA J. Autom. Sinica, 2024. doi: 10.1109/JAS.2024.124704

|
Dear Editor,
This letter studies the event-triggered adaptive horizon distributed model predictive control problem for discrete-time coupled nonlinear systems with additive disturbances. By constructing a new dual-model optimal control problem, an event-triggered mechanism and an adaptive prediction horizon scheme are co-designed in the proposed scheme. Notably, the upper bound of the triggering interval remains independent of the dynamically shrinking prediction horizon. This enables the event-triggered mechanism to operate effectively even when the prediction horizon becomes zero, thus achieving cost savings throughout the control process. In addition, the sufficient conditions of the proposed scheme associated with the feasibility and stability are provided. The effectiveness is illustrated through a practical example.
Related work: Spatially distributed systems, particularly those that are dynamically coupled, have garnered significant attention due to their widespread applications in areas such as urban traffic management, chemical processing, and power systems [1], [2]. Given their inherently spatially distributed nature, centralized control schemes may be inadequate for these systems. Additionally, similar to all other engineering systems, constraints are prevalent in practical coupled systems, necessitating the development of distributed control methods in constraint management [3].
Distributed model predictive control (DMPC) represents a compelling technique, explicitly incorporating system constraints into the optimal control problem (OCP). This endows DMPC with the ability to adeptly manage constraints and optimize performance. Investigations on DMPC of coupled systems can be categorized into two classes based on the predictive model used. The first class regards the coupled states as external disturbances, offering a simplified design but potentially sacrificing control performance [4], [5]. Conversely, the second class integrates the coupled states into the predictive model, which provides more precise predictions and improved performance [6]–[9]. However, the latter approach often relies on additional constraints [6] and auxiliary states [7]–[9] to ensure feasibility and stability, which complexifies the design and analysis of the OCP. Hence, it is worthwhile to consider developing a DMPC scheme for coupled systems that amalgamates the benefits of both aforementioned approaches.
The traditional execution in DMPC necessitates frequently solving the OCP with a fixed prediction horizon, which leads to high resource consumption and hinders its application in actual scenarios [10]. Given this challenge, a promising alternative is a DMPC scheme with an event-triggered mechanism (ETM). Here, the OCP is solved only upon event occurrence, remarkably reducing computing usage. In [7], a novel ETM was specifically designed to mitigate the influence of mutual disturbances by coupled states in the DMPC of coupled systems. Building upon this work, in [8], state constraints were further considered for the development of a compound ETM for the DMPC problem. On the other hand, efforts to decrease the complexity of the OCP supports the development of an adaptive prediction horizon. In [9], the ETM and the updated law for prediction horizon were collaboratively developed for coupled linear systems. Nonetheless, adhering to this constraint that the triggering interval is bounded by the shrinking prediction horizon leads to frequent triggering as the system state converges to the terminal region.
Inspired by the above discussion, this letter proposes an event-triggered adaptive horizon DMPC scheme for discrete-time coupled nonlinear systems with additive disturbances, offering three main contributions: (1) A more applicable event-triggered adaptive horizon DMPC scheme is proposed, where two distinct models are utilized in OCP. The OCP inherits the advantages in [5], [7], [10] and further eliminates the need for auxiliary states [10]. (2) A novel ETM and a newly updated law of prediction horizon are co-designed for the DMPC of coupled systems. Compared with [9], [10], the upper bound of the triggering interval is relaxed, and the ETM remains effective even when the shrinking prediction horizon becomes zero. (3) The sufficient conditions associated with the feasibility and stability are developed using the ETM and the adaptive prediction horizon strategy.
Problem statement: We consider a discrete-time coupled nonlinear system consisting of N subsystems, where subsystem i is given as
| xi(k+1)=fi(xi(k),ui(k))+∑j∈Nihij(xj(k))+vi(k),k≥0, | (1) |
where xi(k)∈Rni denotes the plant state vector, ui(k)∈Rmi is the plant input vector, vi(k)∈Rni is the external disturbance and Ni is the neighbor set of subsystem i. The state, input and disturbance are restricted to the constraints given by xi(k)∈Xi⊆Rni,ui(k)∈Ui⊆Rmi, and vi(k)∈Vi≜{v∈Rni:||v||Pi≤ˉvi}, where Xi, Ui, and Vi are compact sets with the origin inside and Pi≻0 is a positive definite matrix.
To develop a DMPC scheme for coupled systems, another subsystem model is introduced as follows:
| ˉxi(k+1)=fi(ˉxi(k),ˉui(k)). |
Here, ˉxi(k)∈Rni and ˉui(k)∈Rmi are the state and input of the decoupled nominal subsystem of (1), respectively.
Assumption 1: [7], [10] The function fi satisfies ||fi(ξ1,v)− fi(ξ2,v)||Pi≤Li||ξ1−ξ2||Pi, where Li>0 is the Lipschitz constant with respect to matrix Pi.
Remark 1: To estimate Li with a given matrix Pi, one can refer to the theoretical analysis in [11], but it may sometimes yield inflated estimates. Alternatively, Li can be derived via numerical simulations within the compact set, effectively minimizing conservatism.
Our focus is on designing an event-triggered adaptive horizon DMPC scheme for discrete-time coupled nonlinear systems. The developed scheme offers three advantages: (i) simplicity in both design and analysis of the OCP; (ii) effective reduction of computational burden through an ETM; (iii) efficient decrease in the computing complexity of the OCP via an adaptive prediction horizon.
MPC-based controller: At time instant kli (the l-th triggering instant of subsystem i), subsystem controller generates the control sequence of length Nmax. Particularly, the control sequence includes two components: the first N(kli) elements are derived using MPC with prediction horizon N(kli), while the rest of the Nmax−N(kli) elements are calculated with the aid of the auxiliary control law Ki(xi), refer to Fig. 1. First, the updated rule of N(kli) is detailed as follows:
| N(kl+1i)=max{N(kli)−Δ(kli)+1,0}, | (2) |
where Δ(kli)≜kl+1i−kli denotes the triggering interval.
Remark 2: The updated law (2) ensures that N(kl+1i)≤N(kli) holds for any l=0,1,…. Moreover, if Δ(kli)≥2, N(kli) is strictly monotonically decreasing. This property is crucial for decreasing the computational complexity and stability analysis of the DMPC scheme, which will be discussed later.
Next, implementing the MPC scheme needs to solve an OCP online at kli, which is detailed as
| minˆUi(kli)Ji(xi(kli),ˆUi(kli),N(kli))s.t.ˆxi(kli+m+1|kli)=fi(ˆxi(kli+m|kli),ˆui(kli+m|kli)) +∑j∈Nihij(xaj(kli+m|kli)), | (3) |
| ˉxi(kli+m+1|kli)=fi(ˉxi(kli+m|kli),ˆui(kli+m|kli)),ˆxi(kli|kli)=ˉxi(kli|kli)=xi(kli),ˉxi(kli+m|kli)∈Xi⊖Bi(m), ˆui(kli+m|kli)∈Ui,ˉxi(kli+N(kli)|kli)∈Υfi, | (4) |
where m=0,…,N(kli)−1 and ˆUi(kli)={ˆui(kli|kli),…,ˆui(kli+N(kli)−1|kli)} are the decisive variables. With the weighting matrices Qi,Ri,Pi≻0, the cost function is set as Ji(xi(kli),ˆUi(kli),N(kli))≜∑N(kli)−1m=0[||ˆxi(kli+m|kli)||2Qi+||ˆui(kli+m|kli)||2Ri]+||ˆxi(kli+N(kli)|kli)||2Pi. After solving the OCP, we use the superscript "*" to denote the optimal control and its state sequence. xaj(kli+m|kli), j∈Ni, is the assumed state sequence generated by subsystem i, which is given below: when m=0,…,ξj(kli)+N(ξj(kli))−kli, xaj(kli+m|kli)=ˆx∗j(kli+m|ξj(kli)) and when m=ξj(kli)+N(ξj(kli))−kli+1,…,N(kli), xaj(kli+m|kli)=fj(xaj(kli+m−1|kli),Kj(xaj(kli+m−1|kli))), where ξj(kli)≜max{kpj:kpj≤kli,p=0,1,…}. To ensure that xi(k)∈Xi holds in the presence of disturbance, we design Xi⊖Bi(m) with Bi(m)≜{ei:||ei||Pi≤∑m−1n=0Lniηi} in light of Pontryagin set difference in [8], where ηi≜ˉvi+Card{Ni}ζij with \zeta_{ij}= \max_{i}\{\sup_{x_j\in {X}_j}||{h}_{ij}(\boldsymbol{x}_{j})||_{P_i}\} . The terminal set is \Upsilon_{{f}_i}\triangleq\{x\in \mathbb{R}^{{n}_i}:||x||_{P_i}\leq \varepsilon_{{f}_i}\} . Also, the following assumption widely adopted in the MPC literature on the terminal set and local controller are introduced.
Assumption 2: [8], [12] The auxiliary control law {\cal{K}}_i(x_i) , the terminal set \Upsilon_{{f}_i} , and another vital set \Upsilon _{i}\triangleq\{x:||x||_{P_i}\leq \varepsilon_{i} \} satisfy the properties given below: (i) 0\in\Upsilon_{{f}_i} , \Upsilon_{{f}_i}\subseteq \Upsilon _{i}\subseteq {X}_{i}\ominus {B}_i(N({k}_i^0)) ; (ii) {\cal{K}}_i(x_i({k}))\in{U}_i , \forall x_i({k})\in\Upsilon _{i} ; (iii) {f}_i(x_i({k}),{\cal{K}}_i(x_i({k})))\in\Upsilon_{{f}_i} , \forall x_i({k})\in\Upsilon _{i} .
Remark 3: The OCP integrates two predictive models, sharing the identical decision variables \hat{U}_i({k}_i^l) . Specifically, model (3) minimizes the cost function to ensure satisfactory performance, whereas model (4) focuses on constraint design. This setup maintains performance requirements and streamlines analysis compared with [7], [8].
Then, the remaining N_{max}-N({k}_i^l) elements are computed with the aid of the auxiliary control law as follows:
| \begin{split} &\hat{u}_i({k}_i^l+{m}|{k}_i^l)={\cal{K}}_i(\bar{x}_i({k}_i^l+{m}|{k}_i^l)), \\ &\bar{x}_i({k}_i^l+{m}+1|{k}_i^l)={f}_i(\bar{x}_i({k}_i^l+{m}|{k}_i^l),\hat{u}_i({k}_i^l+{m}|{k}_i^l)), \end{split} |
where {m}=N({k}_i^l),\ldots,N_{max}-1 .
Event-triggered condition: In this section, a distributed ETM is designed for each subsystem. The associated event-triggered condition is defined as
| \begin{align} ||x_i({k})-\bar{x}_i({k}|{k}_i^l)||_{P_i}>\frac{\tau_i-\eta_{i}}{L_i} \ {\rm{or}} \ {k}-{k}_i^l = N_{max}, \end{align} | (5) |
where \tau_i>0 is a constant. When either of the above conditions is satisfied at time {k} , the next triggering instant is updated to {k}_i^{l+1}={k} .
Remark 4: Derived from the triggering condition, it is observed that ||{x}_{i}({k}_i^{l+1})-\bar{x}_i({k}_i^{l+1}|{k}_i^{l})||_{P_i}\leq\tau_i , which significantly aids in theoretical analysis. Concurrently, the upper bound of \Delta({k}_i^l) is relaxed to N_{max} rather than the reduced horizon N({k}_i^l) in [9]. Moreover, the triggering condition remains effective even when N({k}_i^l)=0 , thereby reducing the computing burden of the entire control process compared with [9], [10].
Feasibility and stability analysis: This section presents the conditions of iterative feasibility and closed-loop stability of the proposed control scheme. First, we make a standard assumption regarding the initial feasibility of OCP as follows.
Assumption 3: [7], [10] For the i-th subsystem, there exists a prediction horizon N({k}_i^0) such that the OCP is valid at {k}_i^0 .
Theorem 1: For the subsystem (1) with Assumptions 1−3, if the following inequality holds:
| L_i^{N({k}_i^{0})-1}\tau_i\leq\varepsilon_i-\varepsilon_{{f}_i}, | (6) |
then the MPC is recursively feasible.
Proof: Mathematical induction is used to prove the recursive feasibility. Assumption 3 guarantees that a feasible solution of subsystem i exists at {k}_i^{0} . Next, for some l>0 , we assume OCP admits an optimal solution at {k}_i^l . If N({k}_i^l)+1\leq\Delta({k}_i^l) , the MPC will not be executed at {k}_i^{l+1} . Therefore, the recursive feasibility only needs to be proved for the case of N({k}_i^l)+1>\Delta({k}_i^l) . For this, an input candidate is constructed at {k}_i^{l+1} as follows:
| {u}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})=\left\{\begin{aligned} &\hat{u}^*_i({k}_i^{l+1}+{m}|{k}_i^l), {m}=0,\ldots, N({k}_i^{l+1})-2,\\ &{\cal{K}}_{i}( {x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})), \ \ {m}= N({k}_i^{l+1})-1, \end{aligned}\right. |
where {x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1}) represents the state evolving along system (4) with initial state x_{i}({k}_i^{l+1}) . Then, we will prove the fulfillment of the constraints in OCP.
{x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})\in {X}_{i}\ominus {B}_i({m}),{m}=0,\ldots, N({k}_i^{l+1})-1: Considering the difference between {x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1}) and \bar{x}_i({k}_i^{l+1}+{m}|{k}_i^{l}) , one obtains
| \begin{split} &||{x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})-\bar{x}_i({k}_i^{l+1}+{m}|{k}_i^{l})||_{P_i} \\ &\qquad \leq L_i^{m}||{x}_{i}^{o}({k}_i^{l+1}|{k}_i^{l+1})-\bar{x}_i({k}_i^{l+1}|{k}_i^{l})||_{P_i} \\ &\qquad \leq L_i^{m}\sum_{{n}=0}^{\Delta({k}_i^{l})-1}L_i^{n}\eta_i=\sum_{{n}={m}}^{{m}+\Delta({k}_i^{l})-1}L_i^{n}\eta_i. \end{split} | (7) |
Due to \bar{x}_i({k}_i^{l+1}+{m}|{k}_i^{l})\in {X}_{i}\ominus {B}_i({m}+\Delta({k}_i^l)) , one further has
| \begin{split} {x}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})& \in {X}_{i}\ominus {B}_i({m}+\Delta({k}_i^l))\oplus \sum_{{n}={m}}^{{m}+\Delta({k}_i^{l})-1}L_i^{n}\eta_i\\ &\in{X}_{i}\ominus {B}_i({m}). \end{split} |
{x}_{i}^{o}({k}_i^{l+1}+N({k}_i^{l+1})|{k}_i^{l+1})\in\Upsilon_{{f}_i}: By substituting {m}=N({k}_i^{l+1})-1 into (7), it follows
| \begin{split} &||{x}_{i}^{o}({k}_i^{l+1}+N({k}_i^{l+1})-1|{k}_i^{l+1})-\bar{x}_i({k}_i^{l+1}+N({k}_i^{l+1})-1|{k}_i^{l})||_{P_i}\\ &\qquad \leq L_i^{N({k}_i^{l+1})-1}||{x}_{i}^{o}({k}_i^{l+1}|{k}_i^{l+1})-\bar{x}_i({k}_i^{l+1}|{k}_i^{l})||_{P_i}\\ &\qquad \leq L_i^{N({k}_i^{l+1})-1}\tau_i. \end{split} |
According to triangle inequality, \bar{x}_i({k}_i^{l+1}+N({k}_i^{l+1})-1|{k}_i^{l})\in\Upsilon_{{f}_i} , and the condition (6), one yields
| \begin{align} ||{x}_{i}^{o}({k}_i^{l+1}+N({k}_i^{l+1})-1|{k}_i^{l+1})||_{P_i} \leq L_i^{N({k}_i^{l+1})-1}\tau_i+\varepsilon_{{f}_i}\leq\varepsilon_i, \end{align} |
which means {x}_{i}^{o}({k}_i^{l+1}+N({k}_i^{l+1})-1|{k}_i^{l+1})\in\Upsilon _{i} . Using the property (iii) of Assumption 2, {x}_{i}^{o}({k}_i^{l+1}+N({k}_i^{l+1})|{k}_i^{l+1})\in\Upsilon_{{f}_i} holds.
{u}_{i}^{o}({k}_i^{l+1}+{m}|{k}_i^{l+1})\in {U}_{i}: This can be ensured by the feasibility of \hat{U}^*_i({k}_i^l) and {\cal{K}}_i(x_i({k}))\in{U}_i , \forall x_i({k})\in\Upsilon _{i} , in Assumption 2.
Theorem 2: Suppose Assumptions 1-3 and the condition in Theorem 1 hold. If the following inequality holds:
| L_i\eta_{i}(1+L_i)+\eta_{i}\leq\tau_i\leq\varepsilon_i-\varepsilon_{{f}_i}, | (8) |
then the state of subsystem i reaches the set \Upsilon_{i} within finite steps. Moreover, the subsystem state x_i({k}) stays in \Upsilon_{i} for any {k}\geq {k}_{i0} , where {k}_{i0} is the first instant such that N({k}_{i0})=0 .
Proof: According to triggering condition (5), inequality (7) and condition (8), one can obtain \Delta({k}_i^l)\geq2 . As a result, N({k}_i^l) is strictly monotonically decreasing with l, which indicates that the state of subsystem i enters \Upsilon_{i} within finite steps. Once N({k}_i^l)=0 , one has x_i({k})\in\Upsilon _{i} . In light of property (iii) in Assumption 2, we have \bar{x}_i({k}|{k}_i^l)\in\Upsilon_{{f}_i} . By combining condition (8), we have
| ||x_i({k})||_{P_i}\leq||x_i({k})-\bar{x}_i({k}|{k}_i^l)||_{P_i}+||\bar{x}_i({k}|{k}_i^l)||_{P_i}\leq\varepsilon_i. |
This implies x_i({k})\in\Upsilon_{i} and completes the proof.
Numerical example: This section provides three cart-and-spring subsystems connected by springs, which are governed by
| {\begin{split} \;&{x}_{11}({k}+1)={x}_{11}({k})+{T}x_{12}({k}),{x}_{12}({k}+1)=(1-\frac{{T}{k}_{d}}{{M}_{c}})x_{12}({k})-\frac{{T}{k}_{o}}{{M}_{c}}\\ &\cdot e^{-x_{11}({k})}x_{11}({k})-\frac{{T}{k}_{c}}{{M}_{c}}(x_{11}({k})-x_{21}({k}))+\frac{{T}}{{M}_{c}}u_1({k}) + v_{1}({k}),\\ &{x}_{21}({k}+1)={x}_{21}({k})+{T}x_{22}({k}),{x}_{22}({k}+1)=(1-\frac{{T}{k}_{d}}{{M}_{c}})x_{22}({k})-\frac{{T}{k}_{o}}{{M}_{c}}\\ &\cdot e^{-x_{21}({k})}x_{21}({k})-\frac{{T}{k}_{c}}{{M}_{c}}(x_{21}({k})-x_{11}({k}))-\frac{{T}{k}_{c}}{{M}_{c}}(x_{21}({k})-x_{31}({k}))\\ &+\frac{{T}}{{M}_{c}}u_2({k}) + v_{2}({k}),\\ &{x}_{31}({k}+1)={x}_{31}({k})+{T}x_{32}({k}),{x}_{32}({k}+1)=(1-\frac{{T}{k}_{d}}{{M}_{c}})x_{32}({k})-\frac{{T}{k}_{o}}{{M}_{c}}\\ &\cdot e^{-x_{31}({k})}x_{31}({k})-\frac{{T}{k}_{c}}{{M}_{c}}(x_{31}({k})-x_{21}({k}))+\frac{{T}}{{M}_{c}}u_3({k}) + v_{3}({k}), \end{split}} |
where the cart's displacement velocity x_i({k}) and input u_i({k}) are limited by |{x}_{i1}({k})|\leq0.5 , |{x}_{i2}({k})|\leq0.5 and |{u}_i({k})|\leq0.5 , respectively. v_{i}({k}) denotes the bounded disturbance and {T}=0.1 is the sampling period. {M}_{c} , {k}_{o} , {k}_{c} , and {k}_{d} are respectively the cart mass, spring factor, stiffness of the connecting spring and damping factor, which are set as: {M}_{c}=0.75 , {k}_{o}=0.12 , {k}_{c}=0.001 and {k}_{d}=0.6 . The values for control parameters are given as: R_i=1 , Q_i=I_2 , K_1=K_3= [-0.8167,-1.0037] , K_2=[-0.8158,-1.0034] , P_1=P_3=[3.2594, 1.1591; 1.1591, 1.4809] , P_2=[3.2585,1.1584;1.1584,1.4807] , \varepsilon_{i}= 0.6058 , \varepsilon_{{f}_i}=0.5695 , N({k}_i^0)=5 , N_{max}=8 , \bar{{v}}_i=0.001 , \tau_i=0.0066 , L_i=1.5 , \eta_i=0.0013 , and the initial states are {x}_{1}({k}_1^0) = [0.3074, 0.0395]^{\top} , {x}_{2}({k}_2^0)=[0.0276,0.1733]^{\top} and {x}_{3}({k}_3^0)=[0.1933,0.1620]^{\top} .
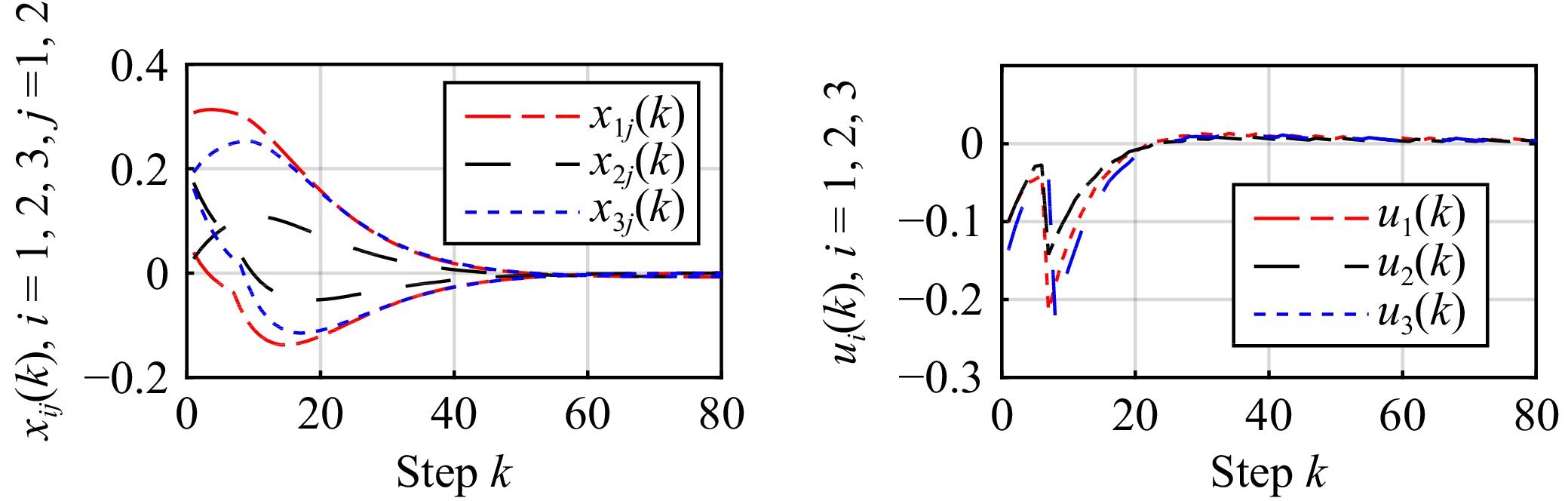
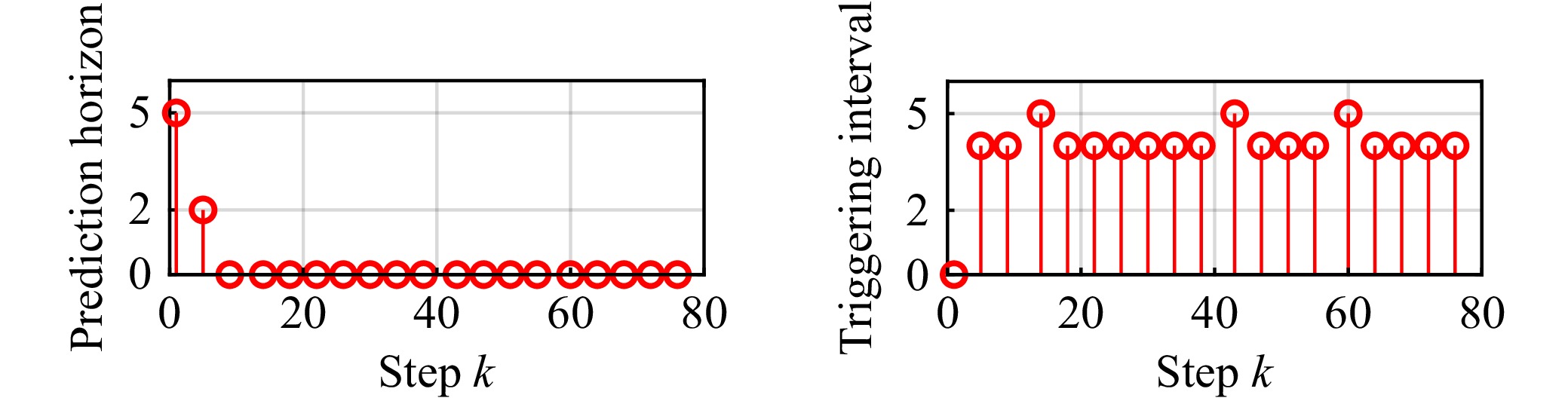
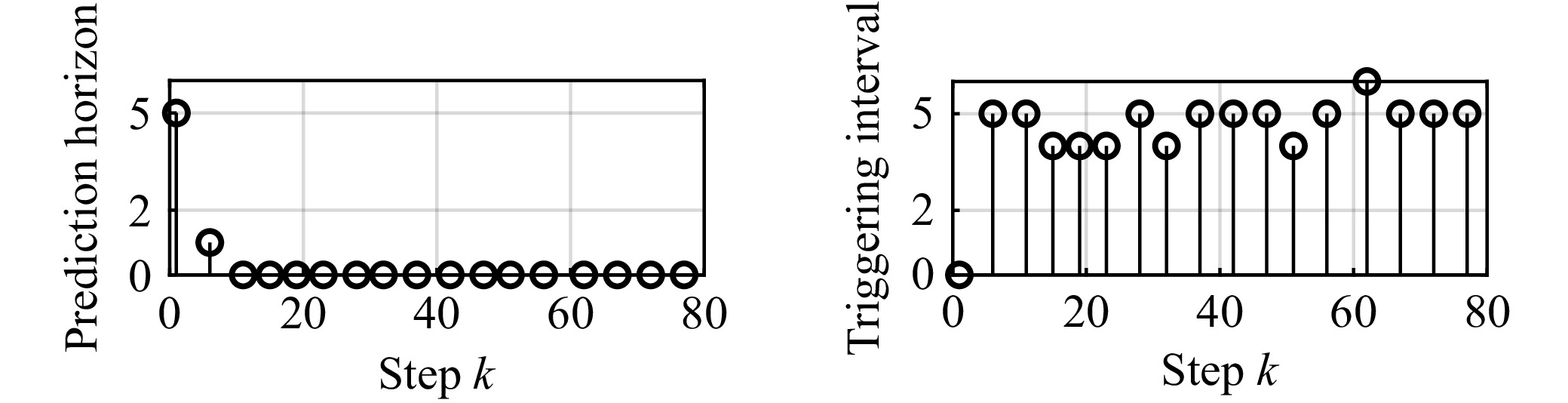
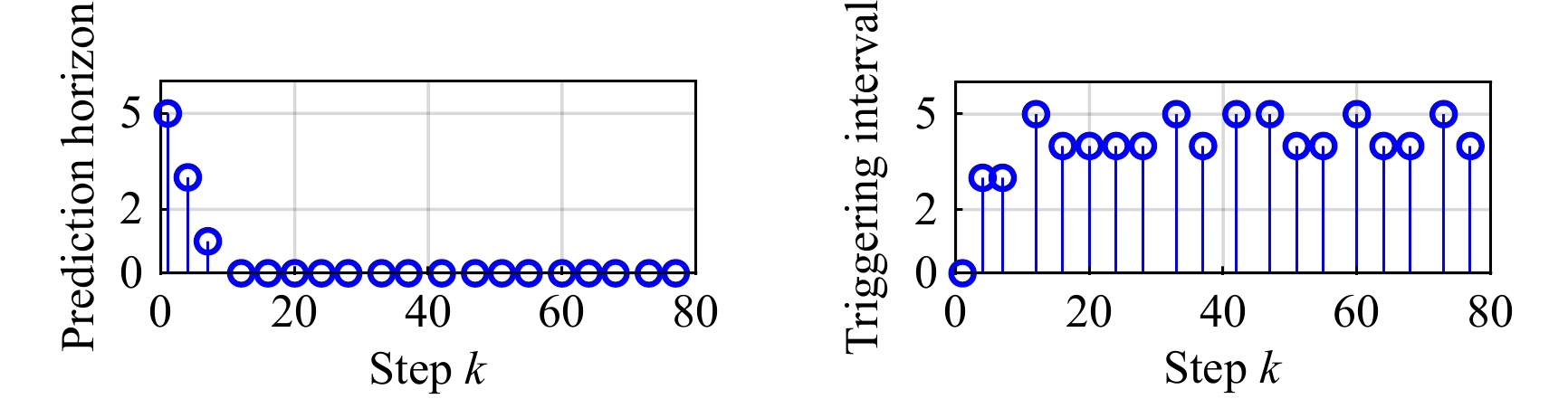
Fig. 2 illustrates that the overall system can be robustly stabilized and the constraints on state and input are satisfied under the proposed scheme. According to Figs. 3-5, the prediction horizon N({k}_i^l) of each subsystem is strictly decreasing, indicating effective savings in the solving time of the OCP. In addition, ETM is operative throughout the control procedure, thus efficiently conserving computational resources. Also, the upper bound of the triggering interval was not affected by the reduced prediction prediction. Compared with the period MPC in [13] among 80 steps, the number of triggers of each subsystem is 19, 17, and 19, respectively, resulting in energy savings of 76%, 78%, and 76%, respectively.
Conclusion: This letter has addressed an event-triggered adaptive horizon DMPC issue of coupled nonlinear systems with additive disturbances, including discussions on feasibility and stability. Simulation results have shown the effectiveness of the proposed scheme. Our next research topic involves considering the problem of dynamic event-triggered DMPC of coupled nonlinear systems.
Acknowledgments: This work was supported by the National Natural Science Foundation of China (62473265, 62476176).
| [1] |
L. D. Baskar, B. D. Schutter, and H. Hellendoorn, “Traffic management for automated highway systems using model-based predictive control,” IEEE Trans. Intell. Transp. Syst., vol. 13, no. 2, pp. 838–847, 2012. doi: 10.1109/TITS.2012.2186441
|
| [2] |
Q. Lü, X. Liao, H. Li, and T. Huang, “Achieving acceleration for distributed economic dispatch in smart grids over directed networks,” IEEE Trans. Netw. Sci. Eng., vol. 7, no. 3, pp. 1988–1999, 2020. doi: 10.1109/TNSE.2020.2965999
|
| [3] |
C. Zhu, X. Han, and X. Li, “Analysis and design of time-delay impulsive systems subject to actuator saturation,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 1, pp. 196–204, 2024. doi: 10.1109/JAS.2023.123720
|
| [4] |
S. Riverso, M. Farina, and G. Ferrari-Trecate, “Plug-and-play decentralized model predictive control for linear systems,” IEEE Trans. Autom. Control, vol. 58, no. 10, pp. 2608–2614, 2013. doi: 10.1109/TAC.2013.2254641
|
| [5] |
P. Wang, X. Ren, and D. Zheng, “Event-triggered asynchronous distributed model predictive control with variable prediction horizon for nonlinear systems,” Int. J. Robust Nonlinear Control, vol. 33, no. 6, pp. 3764–3789, 2023. doi: 10.1002/rnc.6595
|
| [6] |
W. B. Dunbar, “Distributed receding horizon control of dynamically coupled nonlinear systems,” IEEE Trans. Autom. Control, vol. 52, no. 7, pp. 1249–1263, 2007. doi: 10.1109/TAC.2007.900828
|
| [7] |
C. Liu, H. Li, Y. Shi, and D. Xu, “Distributed event-triggered model predictive control of coupled nonlinear systems,” SIAM J. Control Optim., vol. 58, no. 2, pp. 714–734, 2020. doi: 10.1137/18M1176671
|
| [8] |
Y. Kang, T. Wang, P. Li, Z. Xu, and Y.-B. Zhao, “Compound event-triggered distributed MPC for coupled nonlinear systems,” IEEE Trans. Cybern., vol. 53, no. 9, pp. 5572–5584, 2023. doi: 10.1109/TCYB.2022.3159343
|
| [9] |
A. Ma, K. Liu, Q. Zhang, T. Liu, and Y. Xia, “Event-triggered distributed MPC with variable prediction horizon,” IEEE Trans. Autom. Control, vol. 66, no. 10, pp. 4873–4880, 2021. doi: 10.1109/TAC.2020.3040355
|
| [10] |
T. Wang, Y. Kang, P. Li, Y.-B. Zhao, and H. Tang, “Rolling self-triggered distributed MPC for dynamically coupled nonlinear systems,” Automatica, vol. 160, p. 111444, 2024. doi: 10.1016/j.automatica.2023.111444
|
| [11] |
D. L. Marruedo, T. Alamo, and E. Camacho, “Input-to-state stable MPC for constrained discrete-time nonlinear systems with bounded additive uncertainties,” in Proc. IEEE Conf. Decis. Control, 2002, pp. 4619–4624.
|
| [12] |
M. Wang, J. Sun, and J. Chen, “Input-to-state stability of perturbed nonlinear systems with event-triggered receding horizon control scheme,” IEEE Trans. Ind. Electron., vol. 66, no. 8, pp. 6393–6403, 2019. doi: 10.1109/TIE.2018.2874581
|
| [13] |
C. Rajhans, S. C. Patwardhan, and H. Pillai, “Discrete time formulation of quasi infinite horizon nonlinear model predictive control scheme with guaranteed stability,” IFAC-PapersOnline, vol. 50, no. 1, pp. 7181–7186, 2017. doi: 10.1016/j.ifacol.2017.08.602
|
| [1] | Qinglai Wei, Shanshan Jiao, Qi Dong, Fei-Yue Wang. Event-Triggered Robust Parallel Optimal Consensus Control for Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 40-53. doi: 10.1109/JAS.2024.124773 |
| [2] | Shulei Zhang, Runda Jia. A Self-Healing Predictive Control Method for Discrete-Time Nonlinear Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(4): 668-682. doi: 10.1109/JAS.2024.124620 |
| [3] | Xian-Ming Zhang, Qing-Long Han, Xiaohua Ge, Bao-Lin Zhang. Accumulative-Error-Based Event-Triggered Control for Discrete-Time Linear Systems: A Discrete-Time Looped Functional Method[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(4): 683-693. doi: 10.1109/JAS.2024.124476 |
| [4] | Xiangqian Yao, Hao Sun, Zhijia Zhao, Yu Liu. Event-Triggered Bipartite Consensus Tracking and Vibration Control of Flexible Timoshenko Manipulators Under Time-Varying Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1190-1201. doi: 10.1109/JAS.2024.124266 |
| [5] | Bing Zhu, Xiaozhuoer Yuan, Li Dai, Zhiwen Qiang. Finite-Time Stabilization for Constrained Discrete-time Systems by Using Model Predictive Control[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1656-1666. doi: 10.1109/JAS.2024.124212 |
| [6] | Xiaoting Du, Lei Zou, Maiying Zhong. Set-Membership Filtering Approach to Dynamic Event-Triggered Fault Estimation for a Class of Nonlinear Time-Varying Complex Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 638-648. doi: 10.1109/JAS.2023.124119 |
| [7] | Meilin Li, Yue Long, Tieshan Li, Hongjing Liang, C. L. Philip Chen. Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 649-660. doi: 10.1109/JAS.2023.123582 |
| [8] | Wei Qian, Yanmin Wu, Bo Shen. Novel Adaptive Memory Event-Triggered-Based Fuzzy Robust Control for Nonlinear Networked Systems via the Differential Evolution Algorithm[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(8): 1836-1848. doi: 10.1109/JAS.2024.124419 |
| [9] | Sheng Cao, Zhiwei Luo, Changqin Quan. Sequential Inverse Optimal Control of Discrete-Time Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 608-621. doi: 10.1109/JAS.2023.123762 |
| [10] | Lihong Feng, Bonan Huang, Jiayue Sun, Qiuye Sun, Xiangpeng Xie. Adaptive Event-Triggered Time-Varying Output Group Formation Containment Control of Heterogeneous Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(6): 1398-1409. doi: 10.1109/JAS.2024.124260 |
| [11] | Yan-Jun Lin, Yun-Shi Yang, Li Chai, Zhi-Yun Lin. Distributed Finite-Time Event-Triggered Formation Control Based on a Unified Framework of Affine Image[J]. IEEE/CAA Journal of Automatica Sinica. doi: 10.1109/JAS.2023.123885 |
| [12] | Jiayu Chai, Qiang Lu, Xudong Tao, Dongliang Peng, Botao Zhang. Dynamic Event-Triggered Fixed-Time Consensus Control and Its Applications to Magnetic Map Construction[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(10): 2000-2013. doi: 10.1109/JAS.2023.123444 |
| [13] | Meng Yao, Guoliang Wei. Dynamic Event-Triggered Control of Continuous-Time Systems With Random Impulses[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(12): 2292-2299. doi: 10.1109/JAS.2023.123534 |
| [14] | Dong Shen, Yun Xu. Iterative Learning Control for Discrete-time Stochastic Systems with Quantized Information[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 59-67. |
| [15] | Mei Yu, Chuan Yan, Dongmei Xie, Guangming Xie. Event-triggered Tracking Consensus with Packet Losses and Time-varying Delays[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2): 165-173. |
| [16] | Pei Jia, Fei Hao, Hao Yu. Function Observer Based Event-triggered Control for Linear Systems with Guaranteed L∞-Gain[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(4): 394-402. |
| [17] | Zhenhua Wang, Juanjuan Xu, Huanshui Zhang. Consensus Seeking for Discrete-time Multi-agent Systems with Communication Delay[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 151-157. |
| [18] | Hongjing Liang, Huaguang Zhang, Zhanshan Wang, Junyi Wang. Consensus Robust Output Regulation of Discrete-time Linear Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 204-209. |
| [19] | Qiming Zhao, Hao Xu, Sarangapani Jagannathan. Near Optimal Output Feedback Control of Nonlinear Discrete-time Systems Based on Reinforcement Neural Network Learning[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4): 372-384. |
| [20] | Kyriakos G. Vamvoudakis. Event-Triggered Optimal Adaptive Control Algorithm for Continuous-Time Nonlinear Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 282-293. |
Figures(5)




R. Guo, J. Feng, J. Wang, and Y. Zhao, “Event-triggered adaptive horizon DMPC for discrete-time coupled nonlinear systems,” IEEE/CAA J. Autom. Sinica, 2024. doi: 10.1109/JAS.2024.124704
 DownLoad:
DownLoad:

 DownLoad:
DownLoad: