A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 9
Volume 11
Issue 9
IEEE/CAA Journal of Automatica Sinica
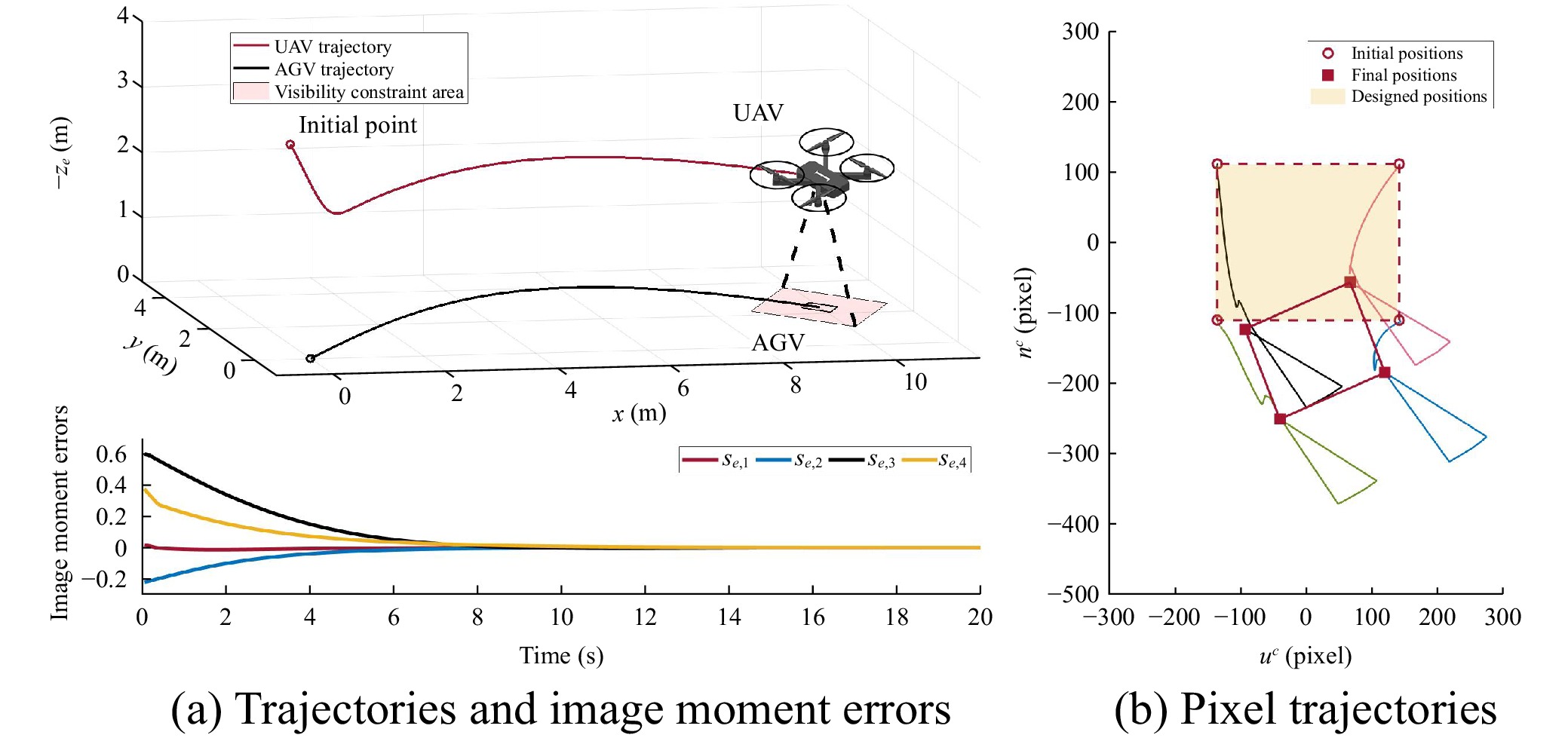
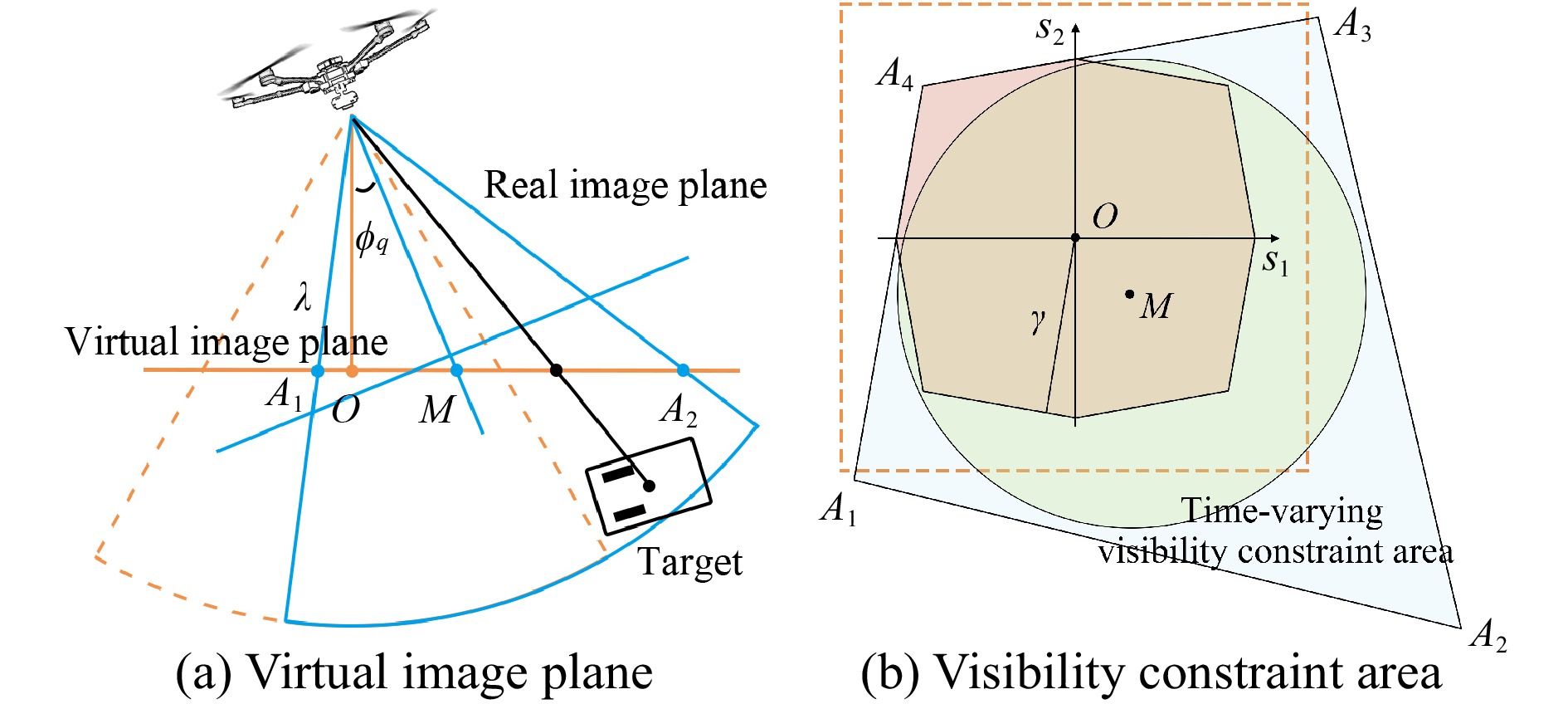
| Citation: | Q. Yang and H. Li, “RMPC-based visual servoing for trajectory tracking of quadrotor UAVs with visibility constraints,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 9, pp. 2027–2029, Sept. 2024. doi: 10.1109/JAS.2024.124533

|

| [1] |
Y. Liu, Z. Meng, Y. Zou, and M. Cao, “Visual object tracking and servoing control of a nano-scale quadrotor: System, algorithms, and experiments,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 344–360, 2021. doi: 10.1109/JAS.2020.1003530
|
| [2] |
H. Xie and A. F. Lynch, “State transformation-based dynamic visual servoing for an unmanned aerial vehicle,” Int. J. Control, vol. 89, no. 5, pp. 892–908, 2016. doi: 10.1080/00207179.2015.1104554
|
| [3] |
W. Zheng, F. Zhou, and Z. Wang, “Robust and accurate monocular visual navigation combining IMU for a quadrotor,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 1, pp. 33–44, 2015. doi: 10.1109/JAS.2015.7032904
|
| [4] |
H. Xie, A. F. Lynch, K. H. Low, and S. Mao, “Adaptive output-feedback image-based visual servoing for quadrotor unmanned aerial vehicles,” IEEE Trans. Control Syst. Tech., vol. 28, no. 3, pp. 1034–1041, 2020. doi: 10.1109/TCST.2019.2892034
|
| [5] |
D. Zheng, H. Wang, J. Wang, X. Zhang, and W. Chen, “Toward visibility guaranteed visual servoing control of quadrotor UAVs,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1087–1095, 2019. doi: 10.1109/TMECH.2019.2906430
|
| [6] |
C. P. Bechlioulis, S. Heshmati-Alamdari, G. C. Karras, and K. J. Kyriakopoulos, “Robust image-based visual servoing with prescribed performance under field of view constraints,” IEEE Trans. Robotics, vol. 35, no. 4, pp. 1063–1070, 2019. doi: 10.1109/TRO.2019.2914333
|
| [7] |
K. Zhang, Y. Shi, and H. Sheng, “Robust nonlinear model predictive control based visual servoing of quadrotor UAVs,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 2, pp. 700–708, 2021. doi: 10.1109/TMECH.2021.3053267
|
| [8] |
H. Li, W. Yan, and Y. Shi, “A receding horizon stabilization approach to constrained nonholonomic systems in power form,” Systems & Control Lett., vol. 99, pp. 47–56, 2017.
|
| [9] |
H. Liang, H. Li, Y. Shi, D. Constantinescu, and D. Xu, “Energy-efficient integrated motion planning and control for unmanned surface vessels,” IEEE Trans. Control Syst. Technology, vol. 32, no. 1, pp. 250–257, 2024. doi: 10.1109/TCST.2023.3292466
|
| [10] |
T. Lee, M. Leok, and N. H. McClamroch, “Nonlinear robust tracking control of a quadrotor UAV on SE SE(3),” Asian J. Control, vol. 15, no. 2, pp. 391–408, 2013. doi: 10.1002/asjc.567
|
| [11] |
M. Lazar and M. Tetteroo, “Computation of terminal costs and sets for discretetime nonlinear MPC,” IFAC-PapersOnLine, vol. 51, no. 20, pp. 141–146, 2018. doi: 10.1016/j.ifacol.2018.11.006
|
| [12] |
H.-N. Nguyen, S. Olaru, P.-O. Gutman, and M. Hovd, “Constrained control of uncertain, time-varying linear discrete-time systems subject to bounded disturbances,” IEEE Trans. Autom. Control, vol. 60, no. 3, pp. 831–836, 2015. doi: 10.1109/TAC.2014.2346872
|
| [13] |
K. Zhang, Q. Sun, and Y. Shi, “Trajectory tracking control of autonomous ground vehicles using adaptive learning MPC,” IEEE Trans. Neural Networks and Learning Syst., vol. 32, no. 12, pp. 5554–5564, 2021. doi: 10.1109/TNNLS.2020.3048305
|
| [14] |
H. Li and Y. Shi, “Event-triggered robust model predictive control of continuous-time nonlinear systems,” Automatica, vol. 50, no. 5, pp. 1507–1513, 2014. doi: 10.1016/j.automatica.2014.03.015
|
Figures(2)






 DownLoad:
DownLoad: