A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 11
Volume 11
Issue 11
IEEE/CAA Journal of Automatica Sinica
| Citation: | Z. Song and P. Li, “General Lyapunov stability and its application to time-varying convex optimization,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 11, pp. 2316–2326, Nov. 2024. doi: 10.1109/JAS.2024.124374

|
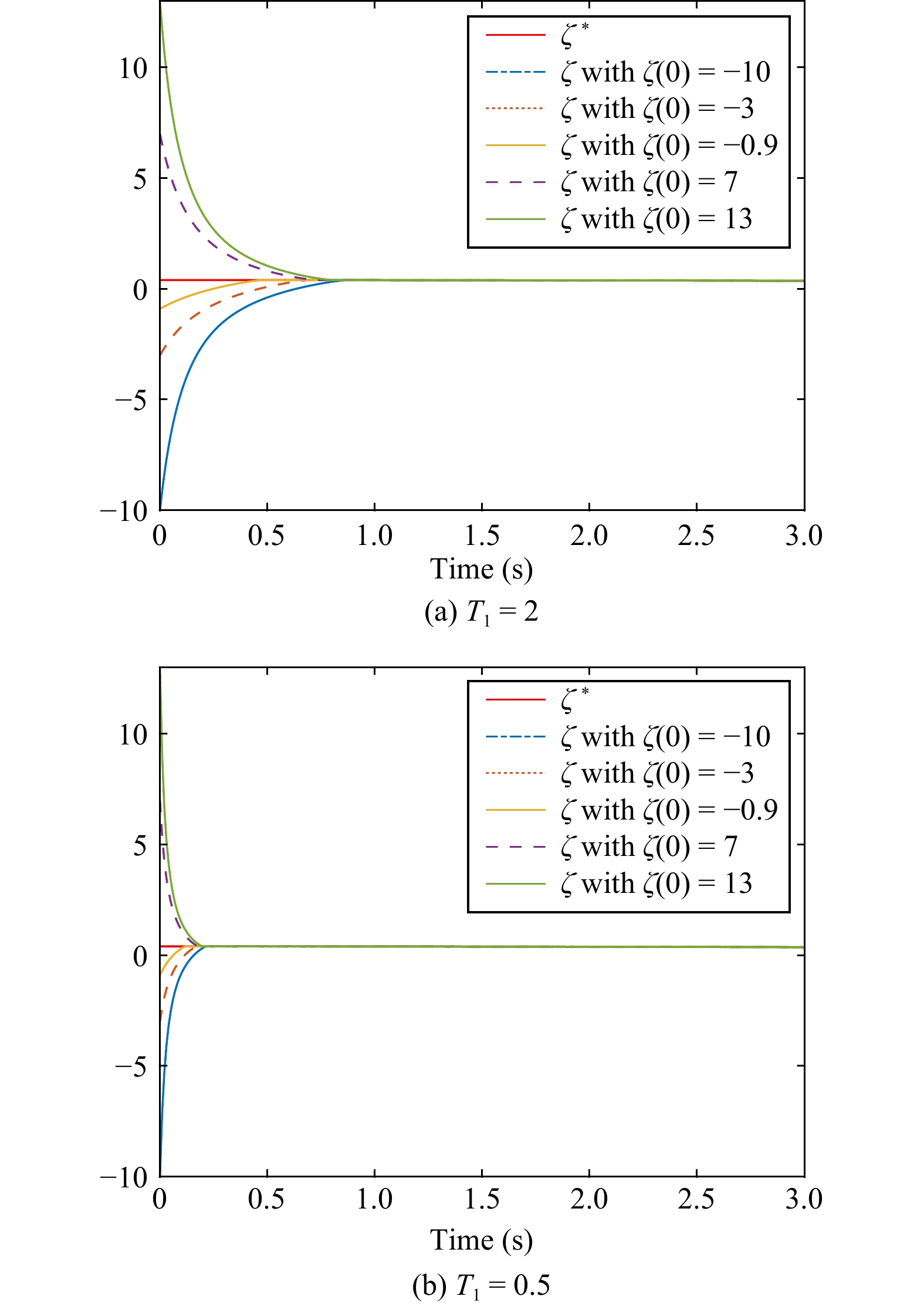
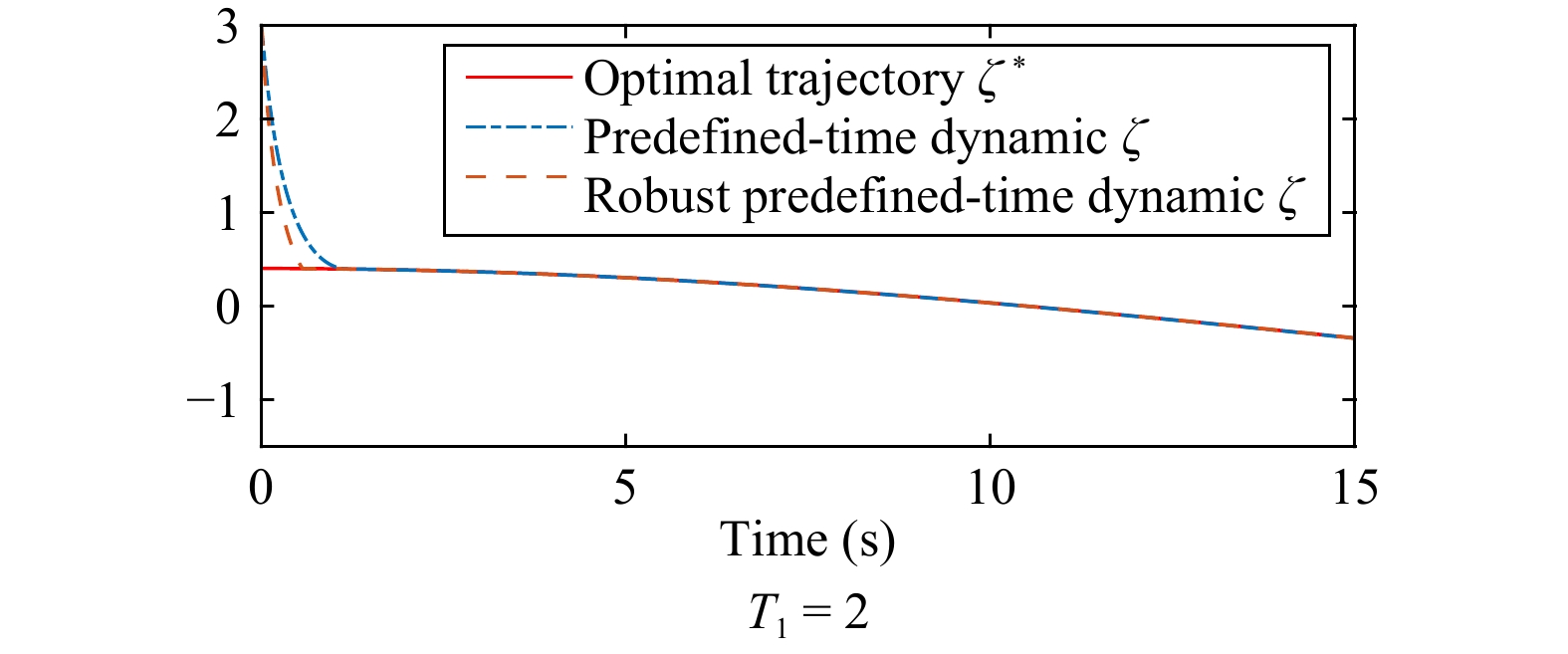
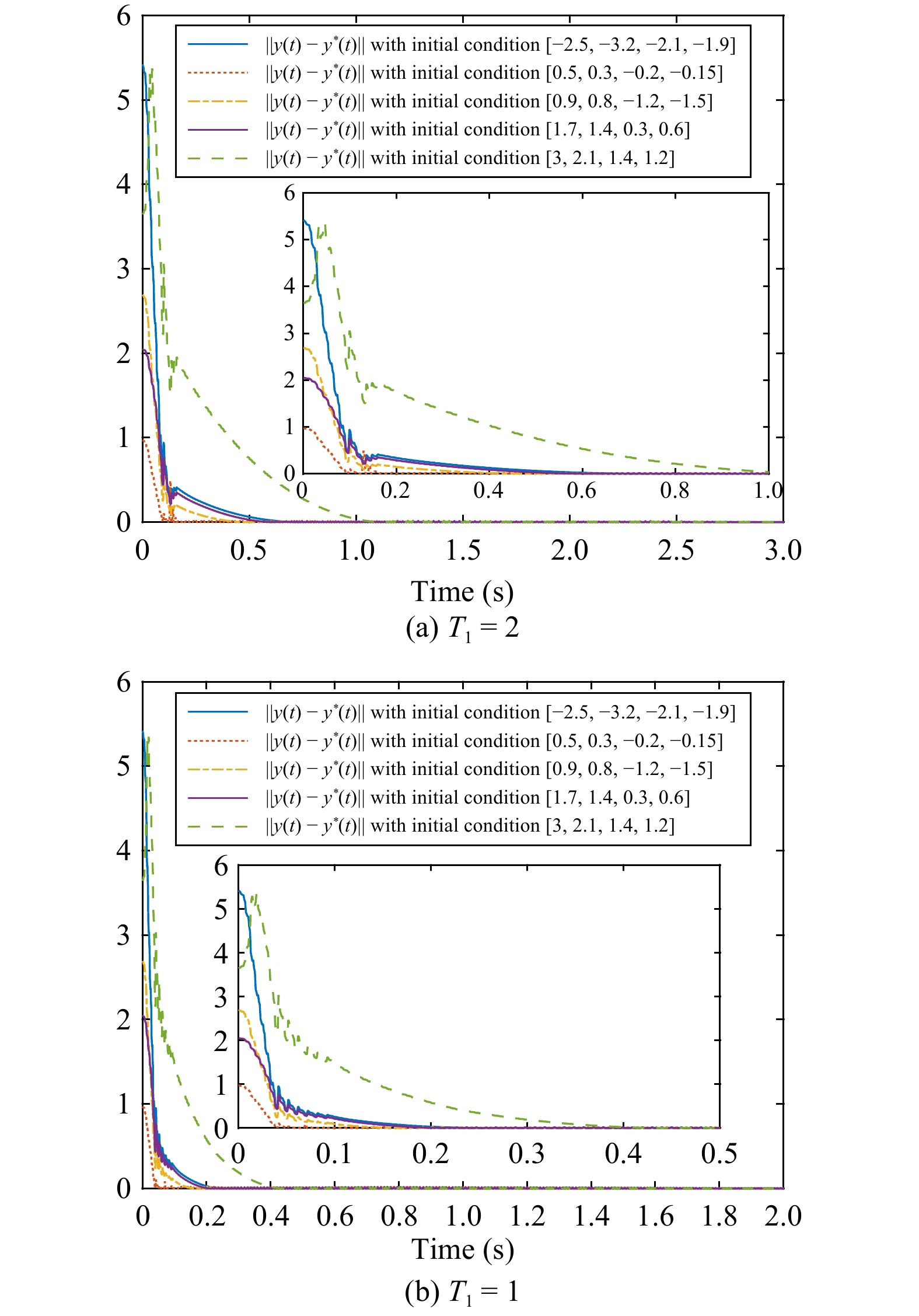
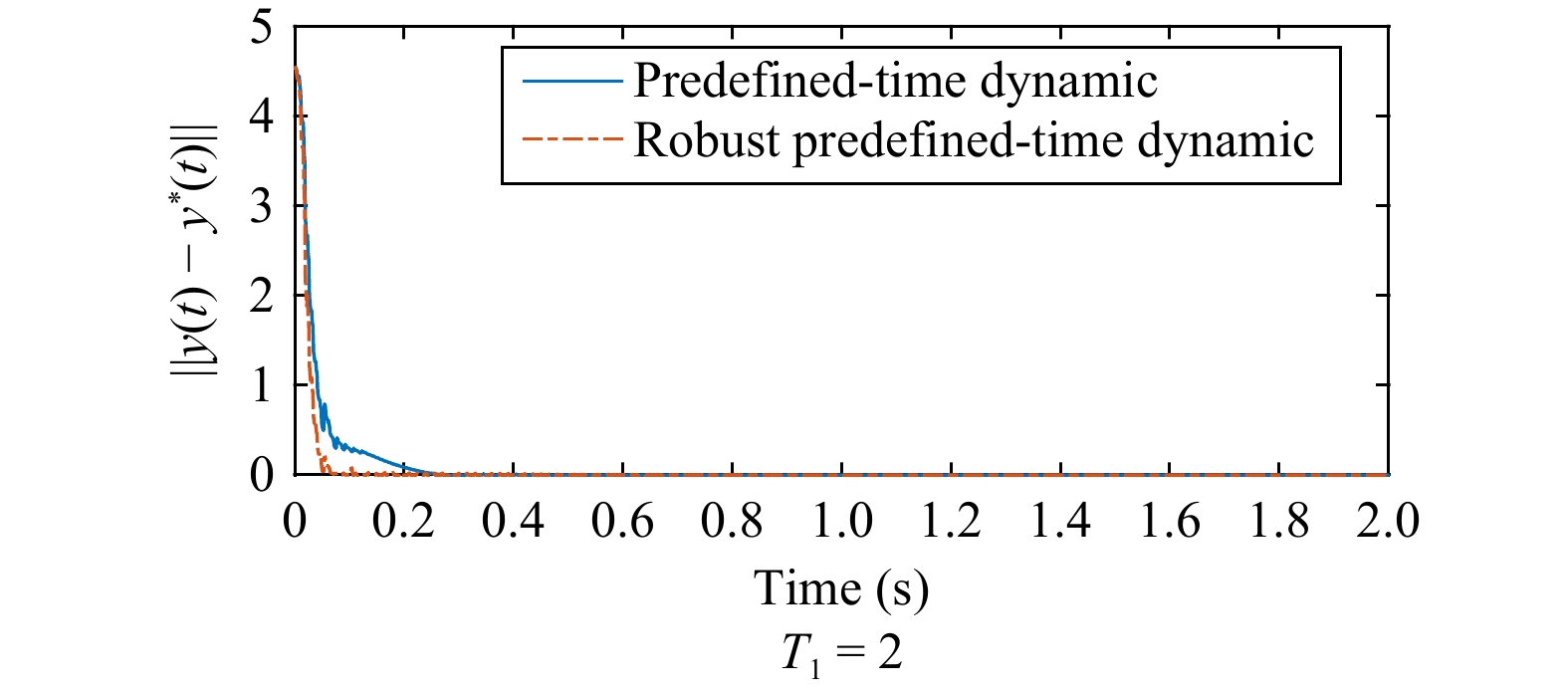
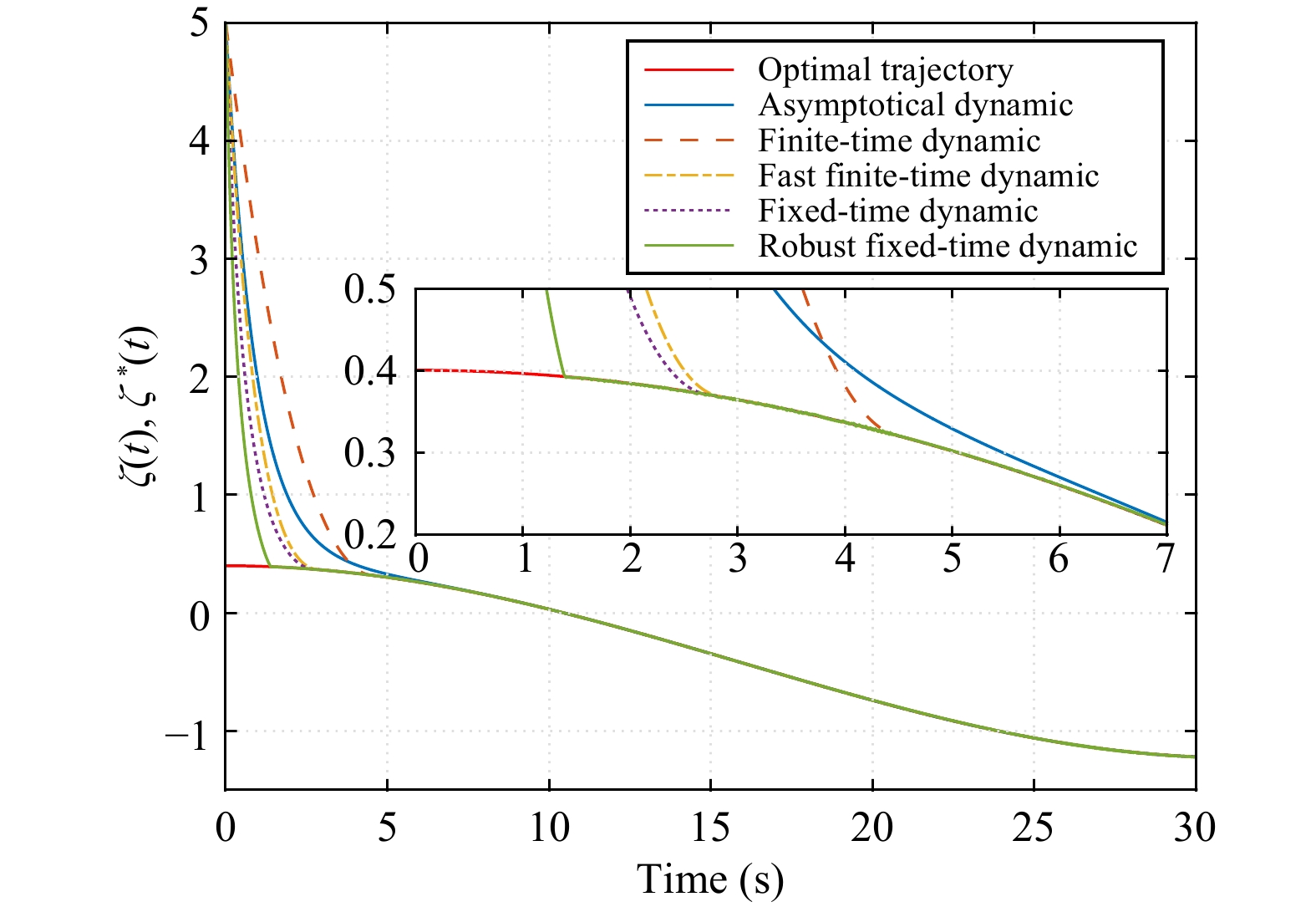
In this article, a general Lyapunov stability theory of nonlinear systems is put forward and it contains asymptotic/finite-time/fast finite-time/fixed-time stability. Especially, a more accurate estimate of the settling-time function is exhibited for fixed-time stability, and it is still extraneous to the initial conditions. This can be applied to obtain less conservative convergence time of the practical systems without the information of the initial conditions. As an application, the given fixed-time stability theorem is used to resolve time-varying (TV) convex optimization problem. By the Newton’s method, two classes of new dynamical systems are constructed to guarantee that the solution of the dynamic system can track to the optimal trajectory of the unconstrained and equality constrained TV convex optimization problems in fixed time, respectively. Without the exact knowledge of the time derivative of the cost function gradient, a fixed-time dynamical non-smooth system is established to overcome the issue of robust TV convex optimization. Two examples are provided to illustrate the effectiveness of the proposed TV convex optimization algorithms. Subsequently, the fixed-time stability theory is extended to the theories of predefined-time/practical predefined-time stability whose bound of convergence time can be arbitrarily given in advance, without tuning the system parameters. Under which, TV convex optimization problem is solved. The previous two examples are used to demonstrate the validity of the predefined-time TV convex optimization algorithms.

| [1] |
U. Helmke and J. Moore, Optimization and Dynamical Systems, New York, USA: Springer, 2012.
|
| [2] |
B. Gharesifard and J. Cortés, “Distributed continuous-time convex optimization on weight-balanced digraphs,” IEEE Trans. Autom. Control, vol. 59, no. 3, pp. 781–786, 2014. doi: 10.1109/TAC.2013.2278132
|
| [3] |
S. Kia, J. Cortes, and S. Martnez, “Distributed convex optimization via continuous-time coordination algorithms with discrete-time communication,” Automatica, vol. 55, pp. 254–264, 2015. doi: 10.1016/j.automatica.2015.03.001
|
| [4] |
X. Wang, G. Wang, and S. Li, “A distributed fixed-time optimization algorithm for multi-agent systems,” Automatica, vol. 122, p. 109289, 2020. doi: 10.1016/j.automatica.2020.109289
|
| [5] |
D. Verscheure, B. Demeulenaere, J. Swevers, J. Schutter, and M. Diehl, “Time-optimal path tracking for robots: A convex optimization approach,” IEEE Trans. Autom. Control, vol. 54, no. 10, pp. 2318–2327, 2009. doi: 10.1109/TAC.2009.2028959
|
| [6] |
E. Dallánese and A. Simonetto, “Optimal power flow pursuit,” IEEE Trans. Smart Grid, vol. 9, no. 2, pp. 942–952, 2018. doi: 10.1109/TSG.2016.2571982
|
| [7] |
J. Chen and V. Lau, “Convergence analysis of saddle point problems in time varying wireless systems control theoretical approach,” IEEE Trans. Signal Processing, vol. 60, no. 1, pp. 443–452, 2012. doi: 10.1109/TSP.2011.2169407
|
| [8] |
A. Simonetto, A. Mokhtari, A. Koppel, G. Leus, and A. Ribeiro, “A class of prediction-correction methods for time-varying convex optimization,” IEEE Trans. Signal Processing, vol. 64, no. 17, pp. 4576–4591, 2016. doi: 10.1109/TSP.2016.2568161
|
| [9] |
A. Simonetto, “Dual prediction-correction methods for linearly constrained time-varying convex programs,” IEEE Trans. Autom. Control, vol. 64, no. 8, pp. 3355–3361, 2019. doi: 10.1109/TAC.2018.2877682
|
| [10] |
M. Fazlyab, S. Paternain, V. Preciado, and A. Ribeiro, “Prediction-correction interior-point method for time-varying convex optimization,” IEEE Trans. Autom. Control, vol. 63, no. 7, pp. 1973–1986, 2018. doi: 10.1109/TAC.2017.2760256
|
| [11] |
B. Huang, Y. Zou, Z. Meng, and W. Ren, “Distributed time-varying convex optimization for a class of nonlinear multiagent systems,” IEEE Trans. Autom. Control, vol. 65, no. 2, pp. 801–808, 2019.
|
| [12] |
A. Bacciotti and L. Rosier, Liapunov Functions and Stability in Control Theory, Springer Science and Business Media, 2005.
|
| [13] |
Z. Xu, X. Li, and V. Stojanovic, “Exponential stability of nonlinear state-dependent delayed impulsive systems with applications,” Nonlinear Analysis: Hybrid Systems, vol. 42, p. 101088, 2021. doi: 10.1016/j.nahs.2021.101088
|
| [14] |
Q. Zhang, X. Song, S. Song, and V. Stojanovic, “Finite-time sliding mode control for singularly perturbed PDE systems,” J. Franklin Institute, vol. 360, no. 2, pp. 841–861, 2023. doi: 10.1016/j.jfranklin.2022.11.037
|
| [15] |
X. Song, P. Sun, S. Song, and V. Stojanovic, “Finite-time adaptive neural resilient DSC for fractional-order nonlinear large-scale systems against sensor-actuator faults,” Nonlinear Dynamics, vol. 111, pp. 12181–12196, 2023. doi: 10.1007/s11071-023-08456-0
|
| [16] |
S. Bhat and D. Bernstein, “Finite-time stability of continuous autonomous systems,” SIAM J. Control and Optimization, vol. 38, no. 3, pp. 751–766, 2000. doi: 10.1137/S0363012997321358
|
| [17] |
Y. Shen and Y. Huang, “Uniformly observable and globally Lipschitzian nonlinear systems admit global finite-time observers,” IEEE Trans. Autom. Control, vol. 54, no. 11, pp. 2621–2625, 2009. doi: 10.1109/TAC.2009.2029298
|
| [18] |
J. Fu, R. Ma, and T. Chai, “Global finite-time stabilization of a class of switched nonlinear systems with the powers of positive odd rational numbers,” Automatica, vol. 54, pp. 360–373, 2015. doi: 10.1016/j.automatica.2015.02.023
|
| [19] |
Z. Sun, Y. Peng, C. Wen, and C. Chen, “Fast finite-time adaptive stabilization of high-order uncertain nonlinear system with an asymmetric output constraint,” Automatica, vol. 121, p. 109170, 2020. doi: 10.1016/j.automatica.2020.109170
|
| [20] |
Z. Song, P. Li, Z. Sun, and Z. Wang, “Finite-time adaptive fuzzy event-triggered control of constrained nonlinear systems via bounded command filter,” IEEE Trans. Fuzzy Systems, vol. 31, no. 1, pp. 117–128, 2023. doi: 10.1109/TFUZZ.2022.3182767
|
| [21] |
Z. Zhang, L. Zheng, L. Li, X. Deng, L. Xiao, and G. Huang, “A new finite-time varying-parameter convergent-differential neural-network for solving nonlinear and nonconvex optimization problems,” Neurocom puting, vol. 319, pp. 74–83, 2018. doi: 10.1016/j.neucom.2018.07.005
|
| [22] |
H. Liu, W. Zheng, and W. Yu, “Continuous-time algorithm based on finite-time consensus for distributed constrained convex optimization,” IEEE Trans. Autom. Control, vol. 67, no. 5, pp. 2552–2559, 2021.
|
| [23] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, 2012. doi: 10.1109/TAC.2011.2179869
|
| [24] |
F. Lopez-Ramirez, A. Polyakov, D. Efimov, and W. Perruquetti, “Finite-time and fixed-time observer design: Implicit Lyapunov function approach,” Automatica, vol. 87, pp. 52–60, 2018. doi: 10.1016/j.automatica.2017.09.007
|
| [25] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, 2020. doi: 10.1109/JAS.2020.1003057
|
| [26] |
S. Shi, H. Min, and S. Ding, “Observer-based adaptive scheme for fixed-time frequency estimation of biased sinusoidal signals,” Automatica, vol. 127, p. 109559, 2021. doi: 10.1016/j.automatica.2021.109559
|
| [27] |
G. Chen and Z. Li, “A fixed-time convergent algorithm for distributed convex optimization in multi-agent systems,” Automatica, vol. 95, pp. 539–543, 2018. doi: 10.1016/j.automatica.2018.05.032
|
| [28] |
K. Garg and D. Panagou, “Fixed-time stable gradient flows: Applications to continuous-time optimization,” IEEE Trans. Autom. Control, vol. 66, no. 5, pp. 2002–2015, 2021. doi: 10.1109/TAC.2020.3001436
|
| [29] |
J. Sánchez-Torres, D. Gómez-Gutiérrez, E. López, and A. Loukianov, “A class of predefined-time stable dynamical systems,” IMA Journal of Mathematical Control and Information, vol. Supplement_1, pp. i1–i29, 2018.
|
| [30] |
E. Jiménez-Rodríguez, A. Muñoz-Vázquez, J. Sánchez-Torres, M. Defoort, and A. Loukianov, “A Lyapunov-like characterization of predefined-time stability,” IEEE Trans. Autom. Control, vol. 65, no. 11, pp. 4922–4927, 2020. doi: 10.1109/TAC.2020.2967555
|
| [31] |
A. Munoz-Vazquez, J. Sánchez-Torres, E. Jimenez-Rodriguez, and A. Loukianov, “Predefined-time robust stabilization of robotic manipulators,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 1033–1040, 2019. doi: 10.1109/TMECH.2019.2906289
|
| [32] |
S. Li, X. Nian, Z. Deng, and Z. Chen, “Predefined-time distributed optimization of general linear multi-agent systems,” Information Sciences, vol. 584, pp. 111–125, 2022. doi: 10.1016/j.ins.2021.10.060
|
| [33] |
Y. Liu, Z. Xia, and W. Gui, “Multi-objective distributed optimization via a predefined-time multi-agent approach,” IEEE Trans. Autom. Control, vol. 68, no. 11, pp. 6998–7005, Nov. 2023. doi: 10.1109/TAC.2023.3244122,2023
|
| [34] |
O. Romero and M. Benosman, “Finite-time convergence in continuous-time optimization,” in Proc. Int. Conf. Machine Learning, Jul. 2020, pp. 8200–8209.
|
| [35] |
S. Parsegov, A. Polyakov, and P. Shcherbakov, “Nonlinear fixed-time control protocol for uniform allocation of agents on a segment,” in Proc. IEEE 51st IEEE Conf. Decision and Control, 2012, pp. 773–7737.
|
| [36] |
H. Hong, W. Yu, G. Jiang, and H. Wang, “Fixed-time algorithms for time-varying convex optimization,” IEEE Trans. Circuits and Systems II: Express Briefs, vol. 70, no. 2, pp. 616–620, 2022.
|
| [37] |
R. Agarwal and V. Lakshmikantham, Uniqueness and Nonuniqueness Criteria for Ordinary Differential Equations, Singapore: World Scientific, 1993.
|
| [38] |
J. Cortes, “Discontinuous dynamical systems,” IEEE Control Systems Magazine, vol. 28, no. 3, pp. 36–73, 2008. doi: 10.1109/MCS.2008.919306
|
| [39] |
R. Kamalapurkar, W. Dixon, and A. Teel, “On reduction of differential inclusions and Lyapunov stability,” in Proc. IEEE 56th Annual Conf. Decision and Control, Mar. 2020, pp. 5499–5504.
|
| [40] |
C. Botsaris, “A class of methods for unconstrained minimization based on stable numerical integration techniques,” J. Mathematical Analysis and Applications, vol. 63, no. 3, pp. 729–749, 1978. doi: 10.1016/0022-247X(78)90068-9
|
| [41] |
A. Brown and M. Bartholomew-Biggs, “Some effective methods for unconstrained optimization based on the solution of systems of ordinary differential equations,” J. Optimization Theory and Applications, vol. 62, pp. 211–224, 1989. doi: 10.1007/BF00941054
|
Figures(10) / Tables(1)






 DownLoad:
DownLoad: