A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 8
Volume 11
Issue 8
IEEE/CAA Journal of Automatica Sinica
| Citation: | W. Sun, X. Gao, L. Ding, and X. Chen, “Distributed fault estimation for nonlinear systems with sensor saturation and deception attacks using stochastic communication protocols,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 8, pp. 1865–1876, Aug. 2024. doi: 10.1109/JAS.2023.124161

|
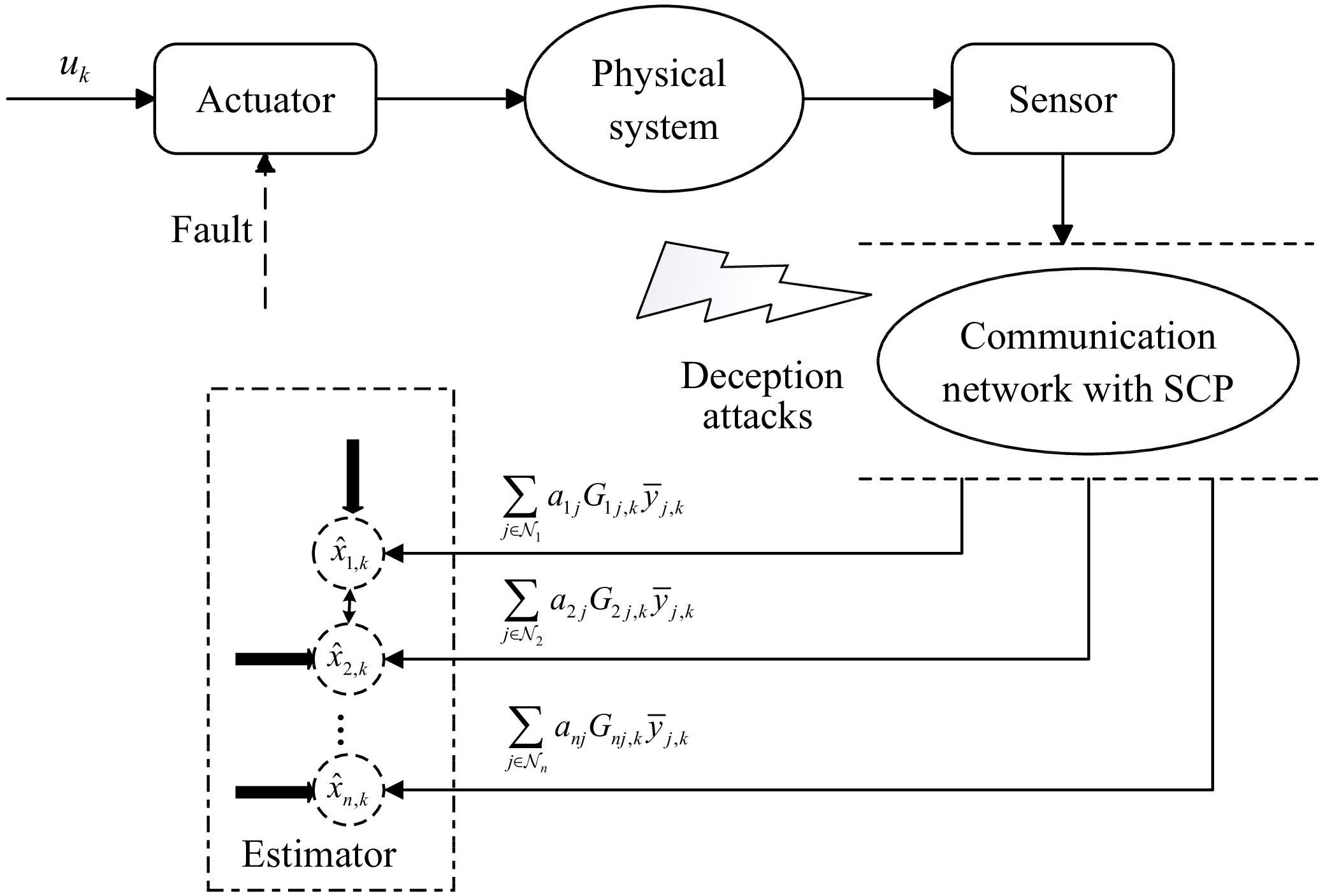
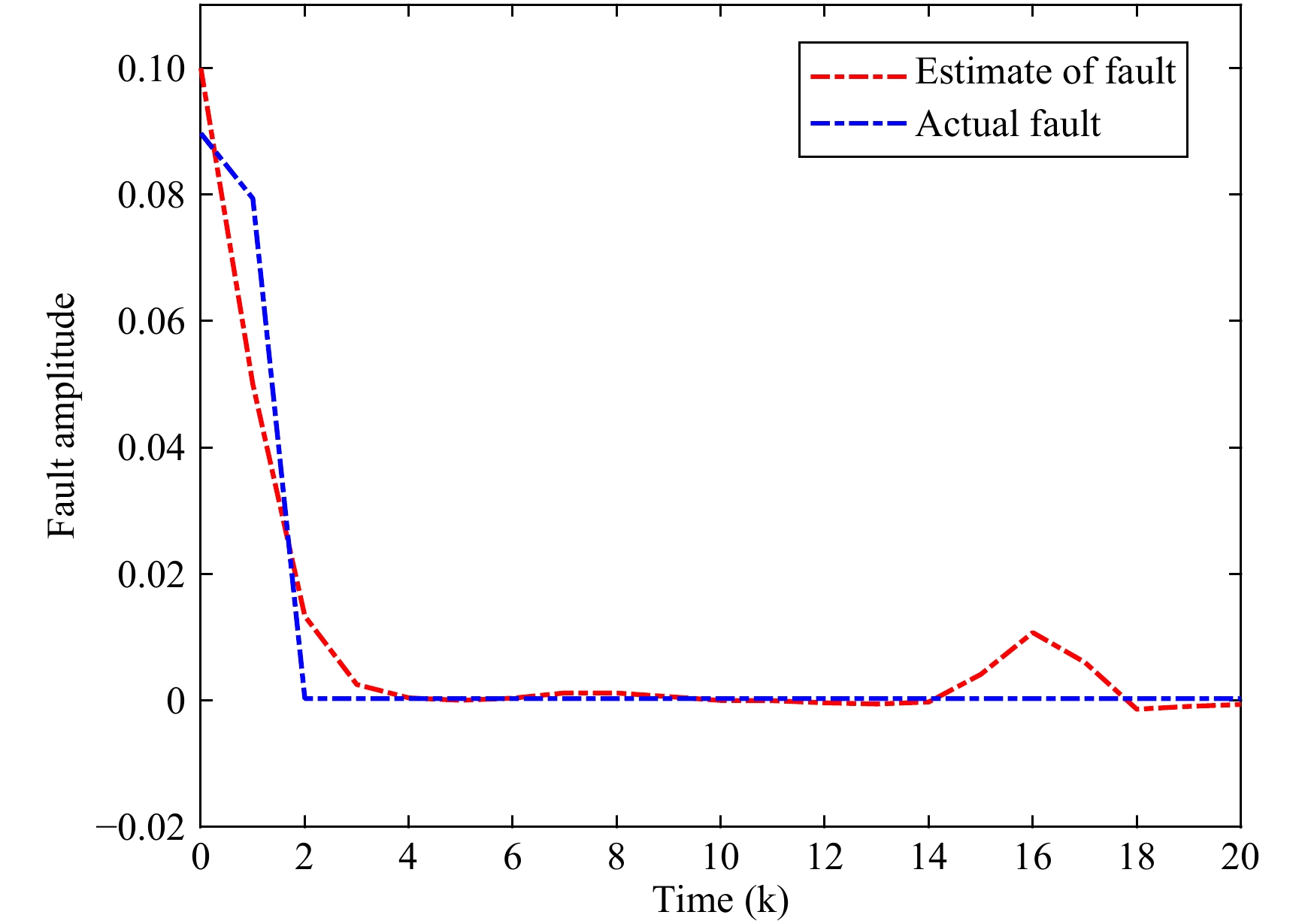
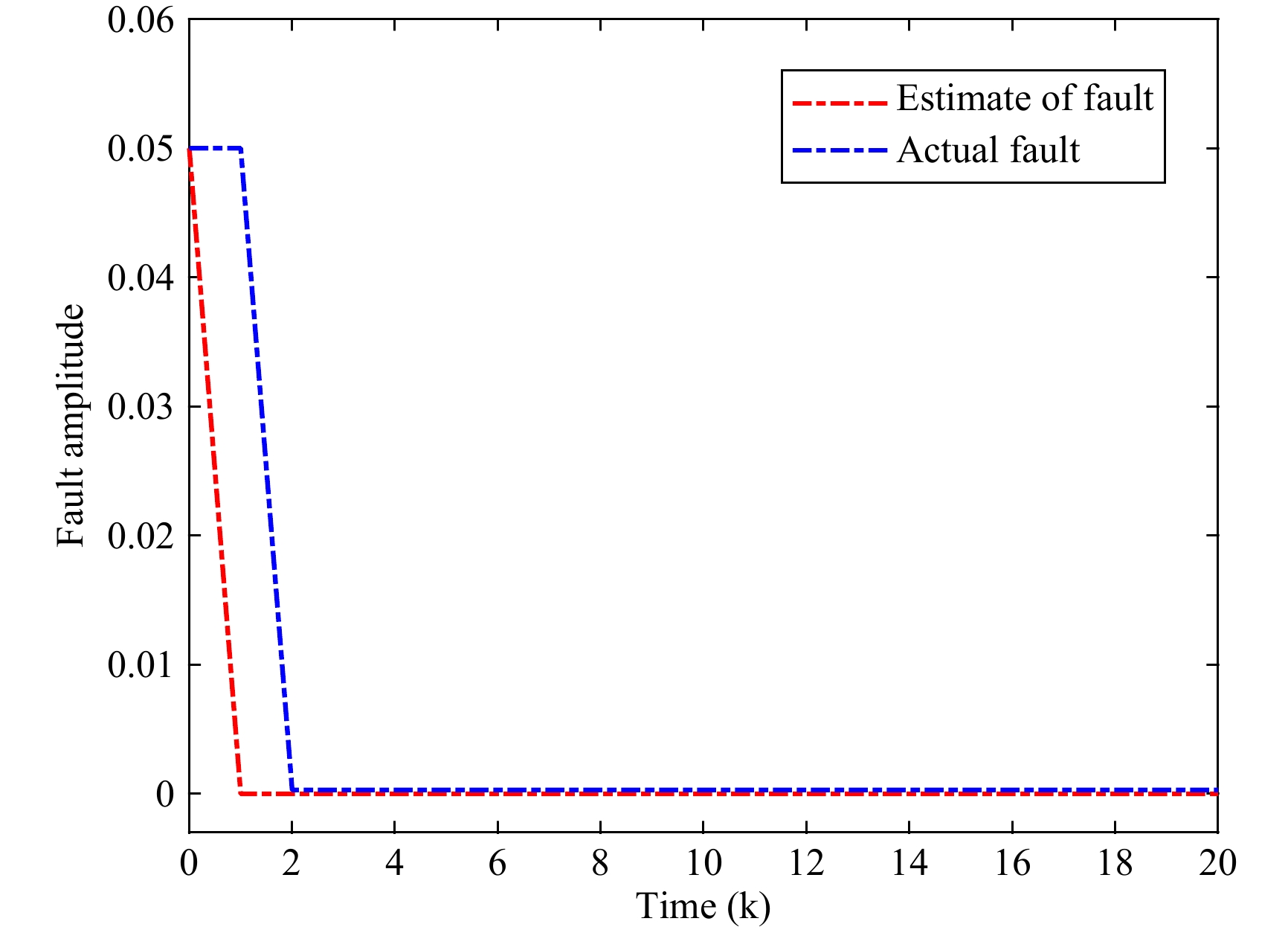
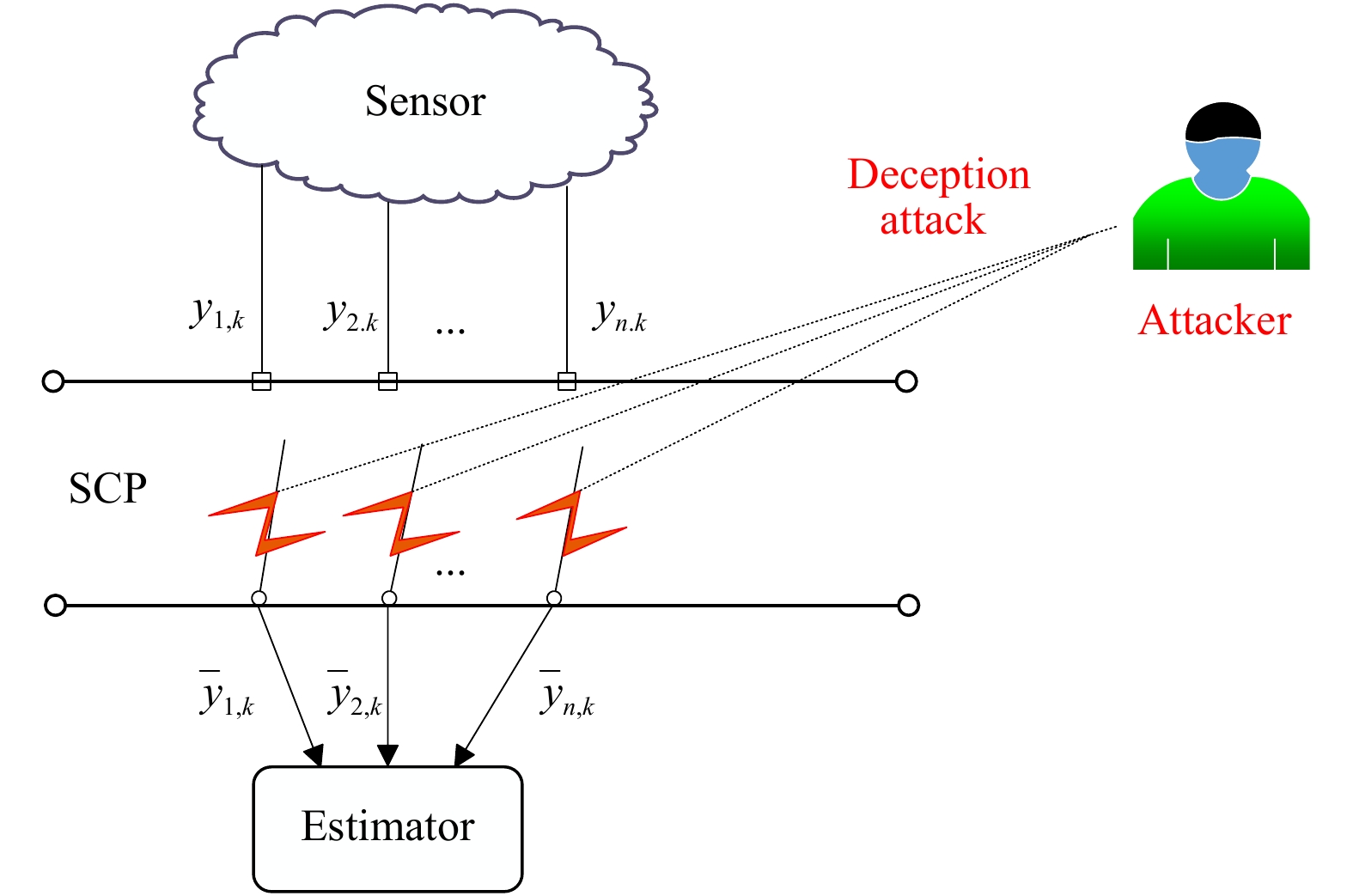
This paper is aimed at the distributed fault estimation issue associated with the potential loss of actuator efficiency for a type of discrete-time nonlinear systems with sensor saturation. For the distributed estimation structure under consideration, an estimation center is not necessary, and the estimator derives its information from itself and neighboring nodes, which fuses the state vector and the measurement vector. In an effort to cut down data conflicts in communication networks, the stochastic communication protocol (SCP) is employed so that the output signals from sensors can be selected. Additionally, a recursive security estimator scheme is created since attackers randomly inject malicious signals into the selected data. On this basis, sufficient conditions for a fault estimator with less conservatism are presented which ensure an upper bound of the estimation error covariance and the mean-square exponential boundedness of the estimating error. Finally, a numerical example is used to show the reliability and effectiveness of the considered distributed estimation algorithm.

| [1] |
F. Pierri, G. Paviglianiti, F. Caccavale, and M. Mattei, “Observer-based sensor fault detection and isolation for chemical batch reactors,” Eng. Appl. Artif. Intell., vol. 21, no. 8, pp. 1204–1216, 2008. doi: 10.1016/j.engappai.2008.02.002
|
| [2] |
G. Yang, Y. Zhao, and X. Gu, “A novel bayesian framework with enhanced principal component analysis for chemical fault diagnosis,” IEEE Trans. Instrum. Meas., vol. 70, p. 3504909, 2021. doi: 10.1109/TIM.2020.3034975
|
| [3] |
H. Badihi, Y. Zhang, and H. Hong, “Wind turbine fault diagnosis and fault-tolerant torque load control against actuator faults,” IEEE Trans. Control Syst. Technol., vol. 23, no. 4, pp. 1351–1372, Jul. 2015. doi: 10.1109/TCST.2014.2364956
|
| [4] |
Y. Li, S. Liu, and L. Shu, “Wind turbine fault diagnosis based on Gaussian process classifiers applied to operational data,” Renew. Energy, vol. 134, pp. 357–366, 2019. doi: 10.1016/j.renene.2018.10.088
|
| [5] |
S. Zare and M. Ayati, “Simultaneous fault diagnosis of wind turbine using multichannel convolutional neural networks,” ISA Trans., vol. 108, pp. 230–239, 2021. doi: 10.1016/j.isatra.2020.08.021
|
| [6] |
W. Kong, Y. Luo, Z. Qin, Y. Qi, and X. Lian, “Comprehensive fault diagnosis and fault-tolerant protection of in-vehicle intelligent electric power supply network,” IEEE Trans. Veh. Technol., vol. 68, no. 11, pp. 10453–10464, Nov. 2019. doi: 10.1109/TVT.2019.2921784
|
| [7] |
Z. Wu, J. Zhao, H. Luo, and Y. Liu, “Real-time open-circuit fault diagnosis method for T-type rectifiers based on median current analysis,” IEEE Trans. Power Electron., vol. 38, no. 7, pp. 8956–8965, Jul. 2023. doi: 10.1109/TPEL.2023.3265188
|
| [8] |
Z. Zhang and Z. Chen, “Fault estimation and tolerant control of a class of nonlinear systems and its application in high-speed trains,” IEEE Trans. Control Syst. Technol., vol. 31, no. 6, pp. 2903–2911, Nov. 2023. doi: 10.1109/TCST.2023.3269599
|
| [9] |
Y. Niu, M. Gao, and L. Sheng, “Fault-tolerant state estimation for stochastic systems over sensor networks with intermittent sensor faults,” Appl. Math. Comput., vol. 416, p. 126723, 2022. doi: 10.1016/j.amc.2021.126723
|
| [10] |
M. Gholami, A. Abbaspour, M. Moeini-Aghtaie, M. Fotuhi-Firuzabad, and M. Lehtonen, “Detecting the location of short-circuit faults in active distribution network using PMU-based state estimation,” IEEE Trans. Smart Grid, vol. 11, no. 2, pp. 1396–1406, Mar. 2020. doi: 10.1109/TSG.2019.2937944
|
| [11] |
A. Basit, M. Tufail, and M. Rehan, “Event-triggered distributed state estimation under unknown parameters and sensor saturations over wireless sensor networks,” IEEE Trans. Circuits Syst. II,Exp. Briefs, vol. 69, no. 3, pp. 1772–1776, Mar. 2022.
|
| [12] |
W. Sun, Z. Wang, X. Lv, F. E. Alsaadi, and H. Liu, “H∞ observer design for networked Hamiltonian systems with sensor saturations and missing measurements,” Inf. Sci., vol. 593, pp. 577–590, 2022. doi: 10.1016/j.ins.2022.02.010
|
| [13] |
E. Mousavinejad, X. Ge, Q.-L. Han, T. J. Lim, and L. Vlacic, “An ellipsoidal set-membership approach to distributed joint state and sensor fault estimation of autonomous ground vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 6, pp. 1107–1118, Jun. 2021. doi: 10.1109/JAS.2021.1004015
|
| [14] |
W. Sun, X. Lv, and M. Qiu, “Distributed estimation for stochastic Hamiltonian systems with fading wireless channels,” IEEE Trans. Cybern., vol. 52, no. 6, pp. 4897–4906, Jun. 2022. doi: 10.1109/TCYB.2020.3023547
|
| [15] |
Q. Li, Z. Wang, J. Hu, and W. Sheng, “Distributed state and fault estimation over sensor networks with probabilistic quantizations: The dynamic event-triggered case,” Automatica, vol. 131, p. 109784, 2021. doi: 10.1016/j.automatica.2021.109784
|
| [16] |
S. A. Ali, M. Guermouche, and N. Langlois, “Fault-tolerant control based super-twisting algorithm for the diesel engine air path subject to loss-of-effectiveness and additive actuator faults,” Appl. Math. Model., vol. 39, no. 15, pp. 4309–4329, 2015. doi: 10.1016/j.apm.2014.12.047
|
| [17] |
B. Jiang, Q. Hu, and M. I. Friswell, “Fixed-time rendezvous control of spacecraft with a tumbling target under loss of actuator effectiveness,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 4, pp. 1576–1586, Aug. 2016. doi: 10.1109/TAES.2016.140406
|
| [18] |
Y. Liu, Z. Wang, and D. Zhou, “Resilient actuator fault estimation for discrete-time complex networks: A distributed approach,” IEEE Trans. Autom. Control, vol. 66, no. 9, pp. 4214–4221, Sept. 2021. doi: 10.1109/TAC.2020.3033710
|
| [19] |
M. Sader, Z. Liu, F. Wang, and Z. Chen, “Distributed robust fault-tolerant consensus tracking control for multi-agent systems with exogenous disturbances under switching topologies,” Int. J. Robust Nonlinear Control, vol. 32, no. 3, pp. 1618–1632, 2022. doi: 10.1002/rnc.5913
|
| [20] |
W.-A. Zhang, L. Yu, and G. Feng, “Optimal linear estimation for networked systems with communication constraints,” Automatica, vol. 47, no. 9, pp. 1992–2000, 2011. doi: 10.1016/j.automatica.2011.05.020
|
| [21] |
Y. Hu, C. Cai, S. H. Lee, Y. G. Lee, and O. M. Kwon, “New results on H∞ control for interval type-2 fuzzy singularly perturbed systems with fading channel: The weighted try-once-discard protocol case,” Appl. Math. Comput., vol. 448, p. 127939, 2023. doi: 10.1016/j.amc.2023.127939
|
| [22] |
J. Wang and Y. Song, “Resilient RMPC for cyber-physical systems with polytopic uncertainties and state saturation under TOD scheduling: An ADT approach,” IEEE Trans. Ind. Inform., vol. 16, no. 7, pp. 4900–4908, Jul. 2020. doi: 10.1109/TII.2019.2938889
|
| [23] |
Z. Zhang, Y. Niu, and H. R. Karimi, “Sliding mode control of interval type-2 fuzzy systems under round-robin scheduling protocol,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 12, pp. 7602–7612, Dec. 2021. doi: 10.1109/TSMC.2019.2956714
|
| [24] |
N. B. Am and E. Fridman, “Network-based H∞ filtering of parabolic systems,” Automatica, vol. 50, no. 12, pp. 3139–3146, 2014. doi: 10.1016/j.automatica.2014.10.009
|
| [25] |
S. Chen, L. Ma, and Y. Ma, “Distributed set-membership filtering for nonlinear systems subject to round-robin protocol and stochastic communication protocol over sensor networks,” Neurocomputing, vol. 385, pp. 13–21, 2020. doi: 10.1016/j.neucom.2019.11.056
|
| [26] |
J. Cheng, H. Yan, J. H. Park, and G. Zong, “Output-feedback control for fuzzy singularly perturbed systems: A nonhomogeneous stochastic communication protocol approach,” IEEE Trans. Cybern., vol. 53, no. 1, pp. 76–87, Jan. 2023. doi: 10.1109/TCYB.2021.3089612
|
| [27] |
A. Cetinkaya, K. Kikuchi, T. Hayakawa, and H. Ishii, “Randomized transmission protocols for protection against jamming attacks in multi-agent consensus,” Automatica, vol. 117, p. 108960, 2020. doi: 10.1016/j.automatica.2020.108960
|
| [28] |
X. Ren, G.-H. Yang, and X. Zhang, “Statistical-based optimal ϵ-stealthy attack under stochastic communication protocol: An application to networked permanent magnet synchronous machine systems,” IEEE Trans. Ind. Electron, vol. 70, no. 1, pp. 1036–1046, Jan. 2023. doi: 10.1109/TIE.2022.3156147
|
| [29] |
F. Wang, Z. Wang, J. Liang, and X. Liu, “Recursive distributed filtering for two-dimensional shift-varying systems over sensor networks under stochastic communication protocols,” Automatica, vol. 115, p. 108865, 2020. doi: 10.1016/j.automatica.2020.108865
|
| [30] |
H. Geng, Z. Wang, Y. Chen, X. Yi, and Y. Cheng, “Variance-constrained filtering fusion for nonlinear cyber-physical systems with the denial-of-service attacks and stochastic communication protocol,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 978–989, Jun. 2022. doi: 10.1109/JAS.2022.105623
|
| [31] |
G. Narayanan, M. S. Ali, Q. Zhu, B. Priya, and G. K. Thakur, “Fuzzy observer-based consensus tracking control for fractional-order multi-agent systems under cyber-attacks and its application to electronic circuits,” IEEE Trans. Netw. Sci. Eng., vol. 10, no. 2, pp. 698–708, Mar.–Apr. 2023. doi: 10.1109/TNSE.2022.3217618
|
| [32] |
R. Sakthivel, O. M. Kwon, M. J. Park, S. M. Lee, and R. Sakthivel, “Disturbance rejection for multi-weighted complex dynamical networks with actuator saturation and deception attacks via hybrid-triggered mechanism,” Neural Netw., vol. 162, pp. 225–239, 2023. doi: 10.1016/j.neunet.2023.02.031
|
| [33] |
A. Kazemy, J. Lam, and X. Zhang, “Event-triggered output feedback synchronization of master-slave neural networks under deception attacks,” IEEE Trans. Neural Netw. Learn. Syst., vol. 33, no. 3, pp. 952–961, Mar. 2022. doi: 10.1109/TNNLS.2020.3030638
|
| [34] |
S. J. Yoo, “Neural-network-based adaptive resilient dynamic surface control against unknown deception attacks of uncertain nonlinear time-delay cyberphysical systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 31, no. 10, pp. 4341–4353, Oct. 2020. doi: 10.1109/TNNLS.2019.2955132
|
| [35] |
K. Ding, Q. Zhu, and T. Huang, “Partial-information-based non-fragile intermittent estimator for microgrids with semi-aperiodic DoS attacks: Gain stochastic float,” IEEE Trans. Power Syst., vol. 39, no. 1, pp. 2271–2283, Jan. 2024.
|
| [36] |
I. Bessa, C. Trapiello, V. Puig, and R. M. Palhares, “Dual-rate control framework with safe watermarking against deception attacks,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 52, no. 12, pp. 7494–7506, Dec. 2022. doi: 10.1109/TSMC.2022.3160791
|
| [37] |
K. Reif, S. Gunther, E. Yaz, and R. Unbehauen, “Stochastic stability of the discrete-time extended Kalman filter,” IEEE Trans. Autom. Control, vol. 44, no. 4, pp. 714–728, Apr. 1999. doi: 10.1109/9.754809
|
| [38] |
X. He, Z. Wang, Y. Liu, and D. Zhou, “Least-squares fault detection and diagnosis for networked sensing systems using a direct state estimation approach,” IEEE Trans. Ind. Inform., vol. 9, no. 3, pp. 1670–1679, Aug. 2013. doi: 10.1109/TII.2013.2251891
|
Figures(7)






 DownLoad:
DownLoad: