A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 7
Volume 11
Issue 7
IEEE/CAA Journal of Automatica Sinica
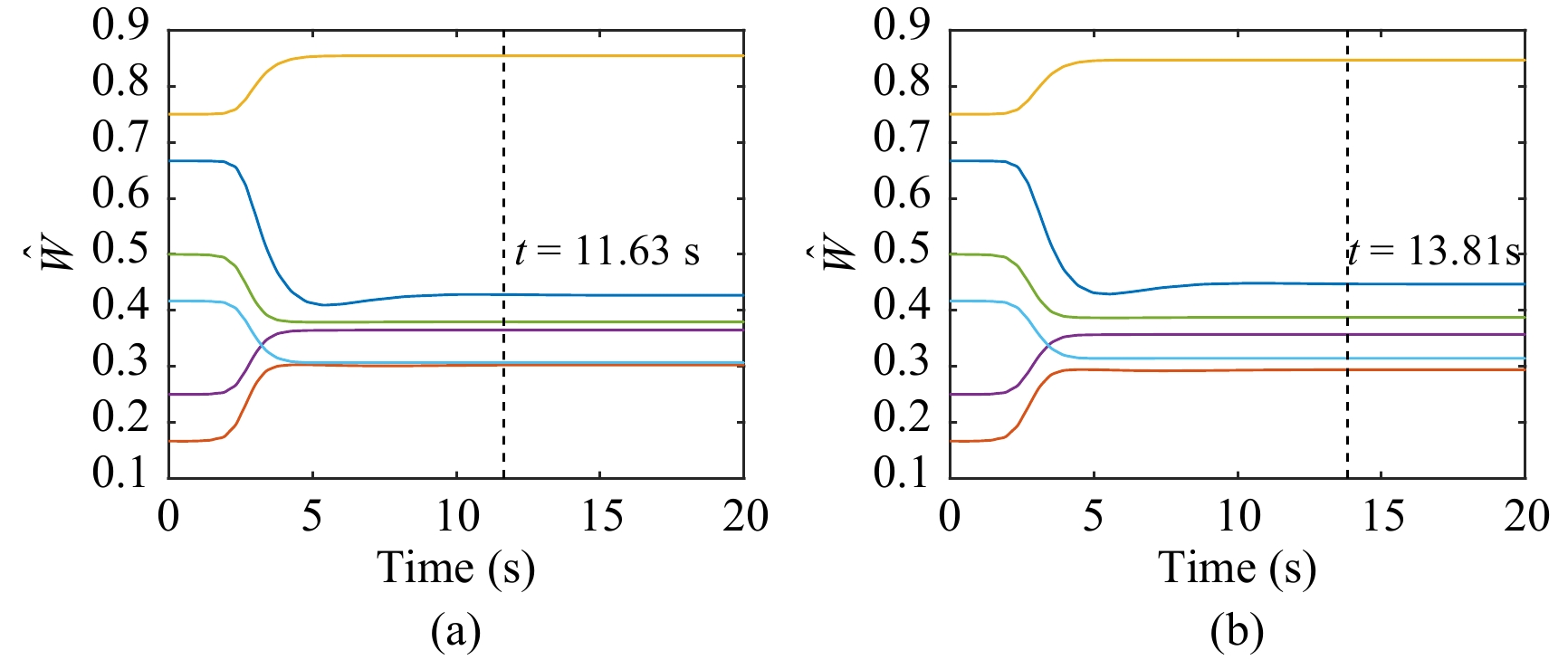
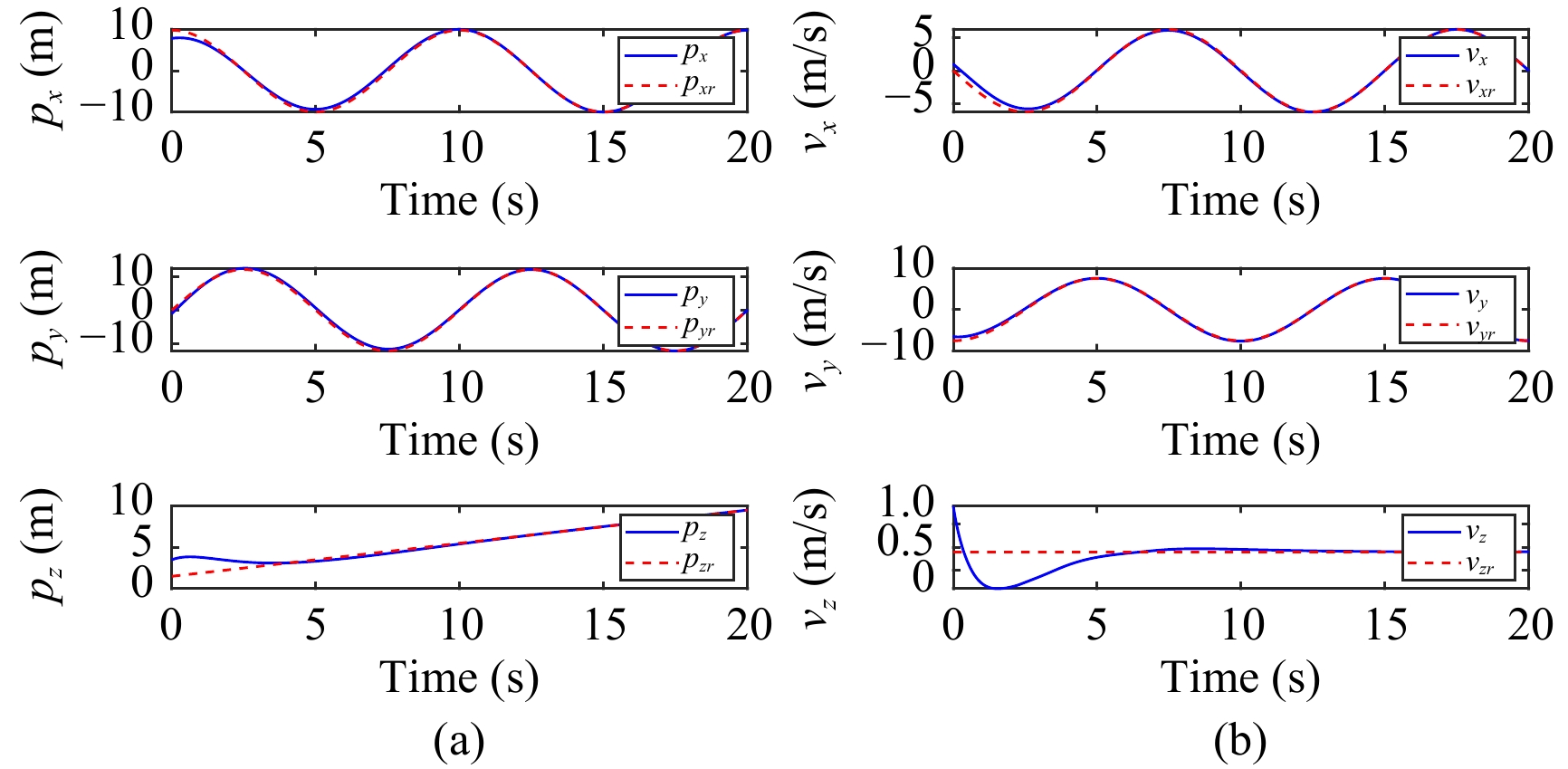
| Citation: | Z. Gong and F. Yang, “Secure tracking control via fixed-time convergent reinforcement learning for a UAV CPS,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 7, pp. 1699–1701, Jul. 2024. doi: 10.1109/JAS.2023.124149

|

| [1] |
H. Wang, H. Zhao, J. Zhang, D. Ma, J. Li, and J. Wei, “Survey on unmanned aerial vehicle networks: A cyber physical system perspective,” IEEE Communi. Surveys &Tutorials, vol. 22, no. 2, pp. 1027–1070, 2020.
|
| [2] |
H. Lin, P. Sun, C. Cai, S. Lu, and H. Liu, “Secure LQG control for a quadrotor under false data injection attacks,” IET Control Theory &Applications, vol. 16, no. 9, pp. 925–934, Jun. 2022.
|
| [3] |
L. Dou, X. Su, X. Zhao, Q. Zong, and L. He, “Robust tracking control of quadrotor via on-policy adaptive dynamic programming,” Int. J. Robust and Nonlinear Control, vol. 31, no. 7, pp. 2509–2525, May 2021. doi: 10.1002/rnc.5419
|
| [4] |
M. Ha, D. Wang, and D. Liu, “Discounted iterative adaptive critic designs with novel stability analysis for tracking control,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1262–1272, Jul. 2022. doi: 10.1109/JAS.2022.105692
|
| [5] |
W. Yang, G. Cui, Q. Ma, J. Ma, and S. Guo, “Finite-time adaptive optimal tracking control for a QUAV,” Nonlinear Dynamics, vol. 111, no. 11, pp. 10063–10076, Mar. 2023. doi: 10.1007/s11071-023-08349-2
|
| [6] |
Y. Huang and J. Zhao, “Switching defence for switched systems under malicious attacks: A Stackelberg game approach,” Nonlinear Analysis: Hybrid Systems, vol. 42, p. 101092, Nov. 2021. doi: 10.1016/j.nahs.2021.101092
|
| [7] |
J. Shen, X. Ye, and D. Feng, “A game-theoretic method for resilient control design in industrial multi-agent CPSs with Markovian and coupled dynamics,” Int. J. Control, vol. 94, no. 11, pp. 3079–3090, Nov. 2021. doi: 10.1080/00207179.2020.1750707
|
| [8] |
C. Wu, X. Li, W. Pan, J. Liu, and L. Wu, “Zero-sum game based optimal secure control under actuator attacks,” IEEE Trans. Autom. Control, vol. 66, no. 8, pp. 3773–3780, Aug. 2021. doi: 10.1109/TAC.2020.3029342
|
| [9] |
Y. Zhou, K. G. Vamvoudakis, W. M. Haddad, and Z. P. Jiang, “A secure control learning framework for cyber-physical systems under sensor and actuator attacks,” IEEE Trans. Cyber., vol. 51, no. 9, pp. 4648–4660, Sept. 2021. doi: 10.1109/TCYB.2020.3006871
|
| [10] |
N.-M. T. Kokolakis and K. G. Vamvoudakis, “Safety-aware pursuit-evasion games in unknown environments using Gaussian processes and finite-time convergent reinforcement learning,” IEEE Trans. Neural Networks and Learning Systems, vol. 35, no. 3, pp. 3130–3143, Mar. 2024. doi: 10.1109/TNNLS.2022.3203977
|
| [11] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, Aug. 2012. doi: 10.1109/TAC.2011.2179869
|
| [12] |
Z. Zuo and L. Tie, “A new class of finite-time nonlinear consensus protocols for multi-agent systems,” Int. J. Control, vol. 87, no. 2, pp. 363–370, Feb. 2014. doi: 10.1080/00207179.2013.834484
|
Figures(2)






 DownLoad:
DownLoad: