A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 7
Volume 11
Issue 7
IEEE/CAA Journal of Automatica Sinica
| Citation: | J.-X. Zhang, K.-D. Xu, and Q.-G. Wang, “Prescribed performance tracking control of time-delay nonlinear systems with output constraints,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 7, pp. 1557–1565, Jul. 2024. doi: 10.1109/JAS.2023.123831

|
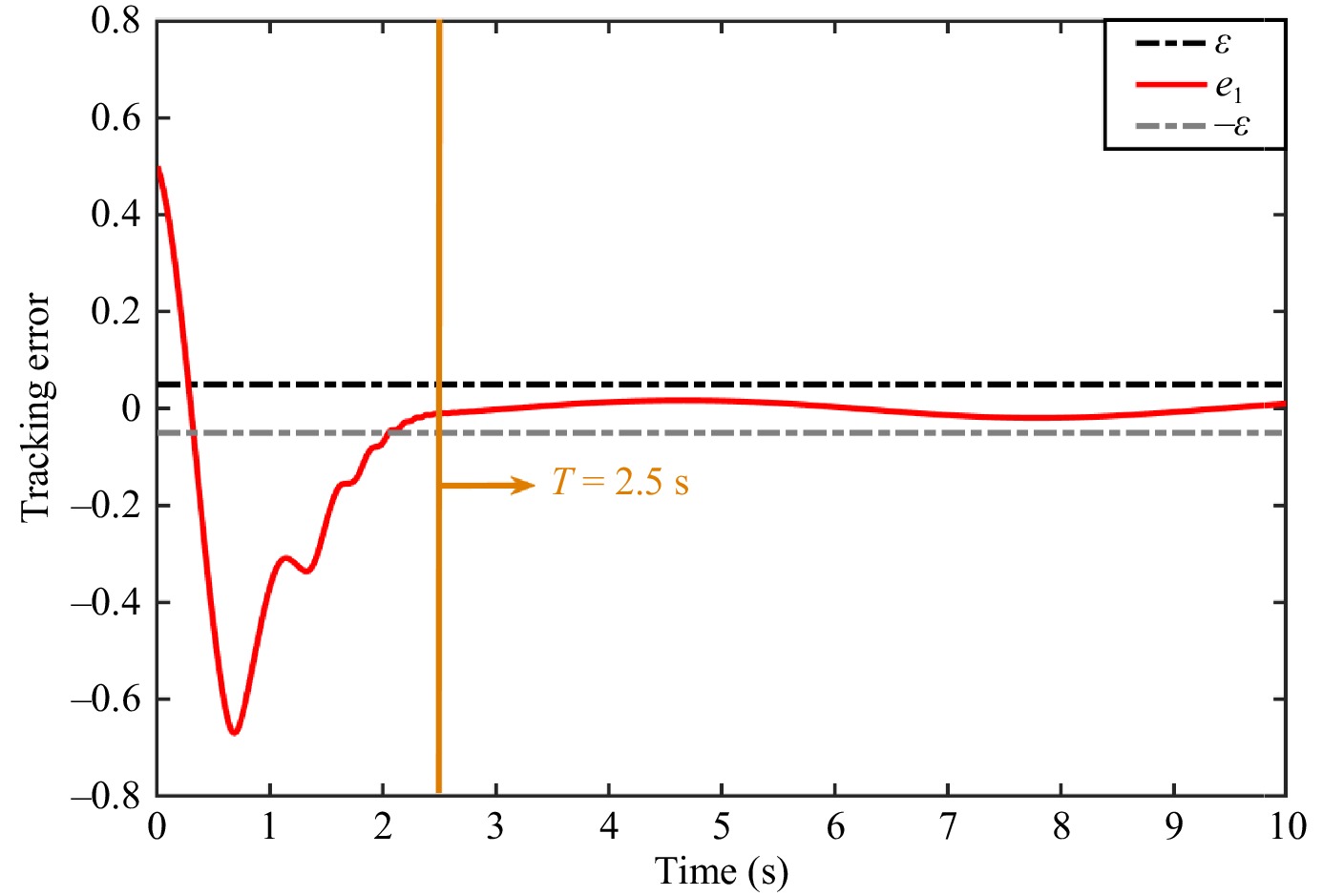
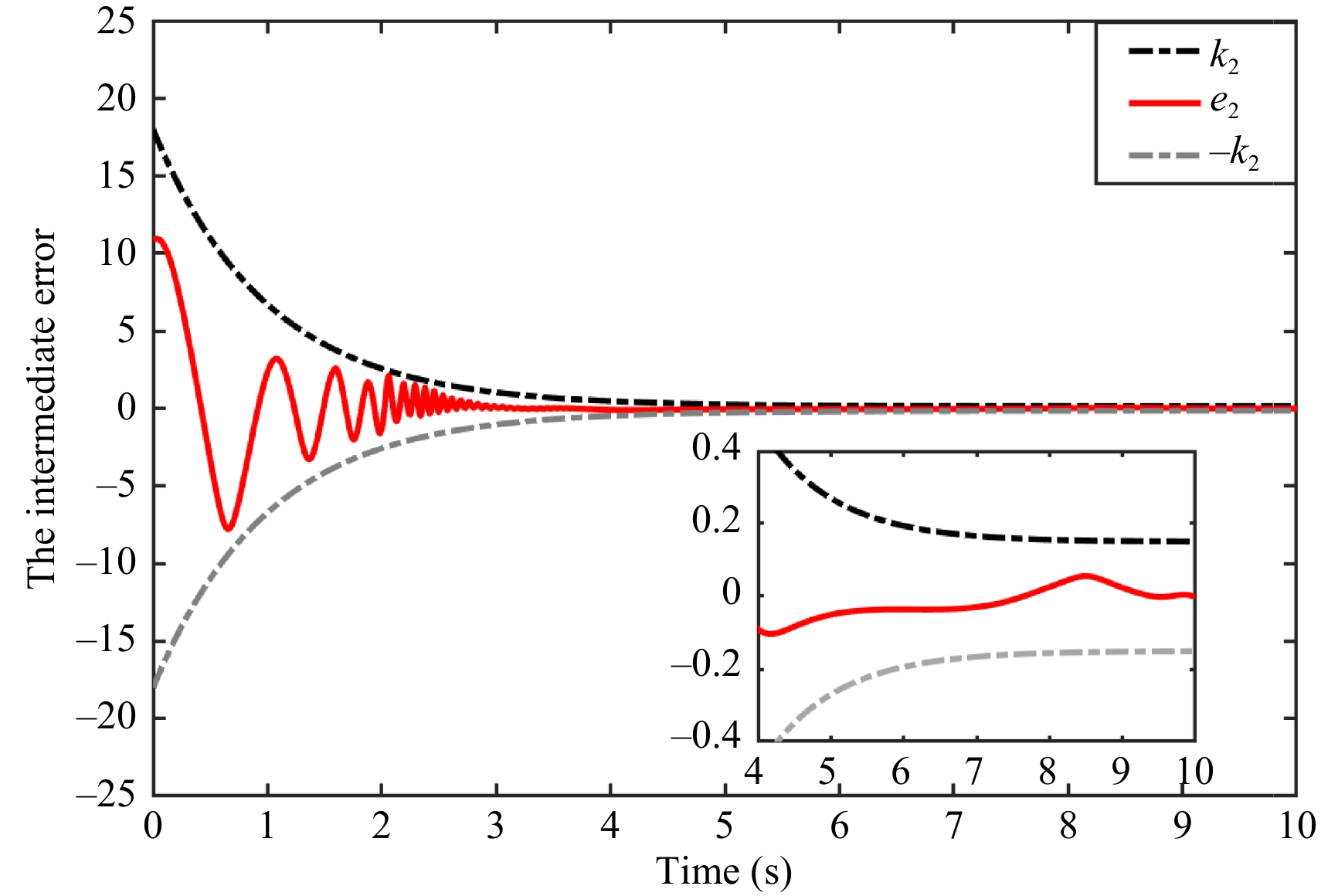
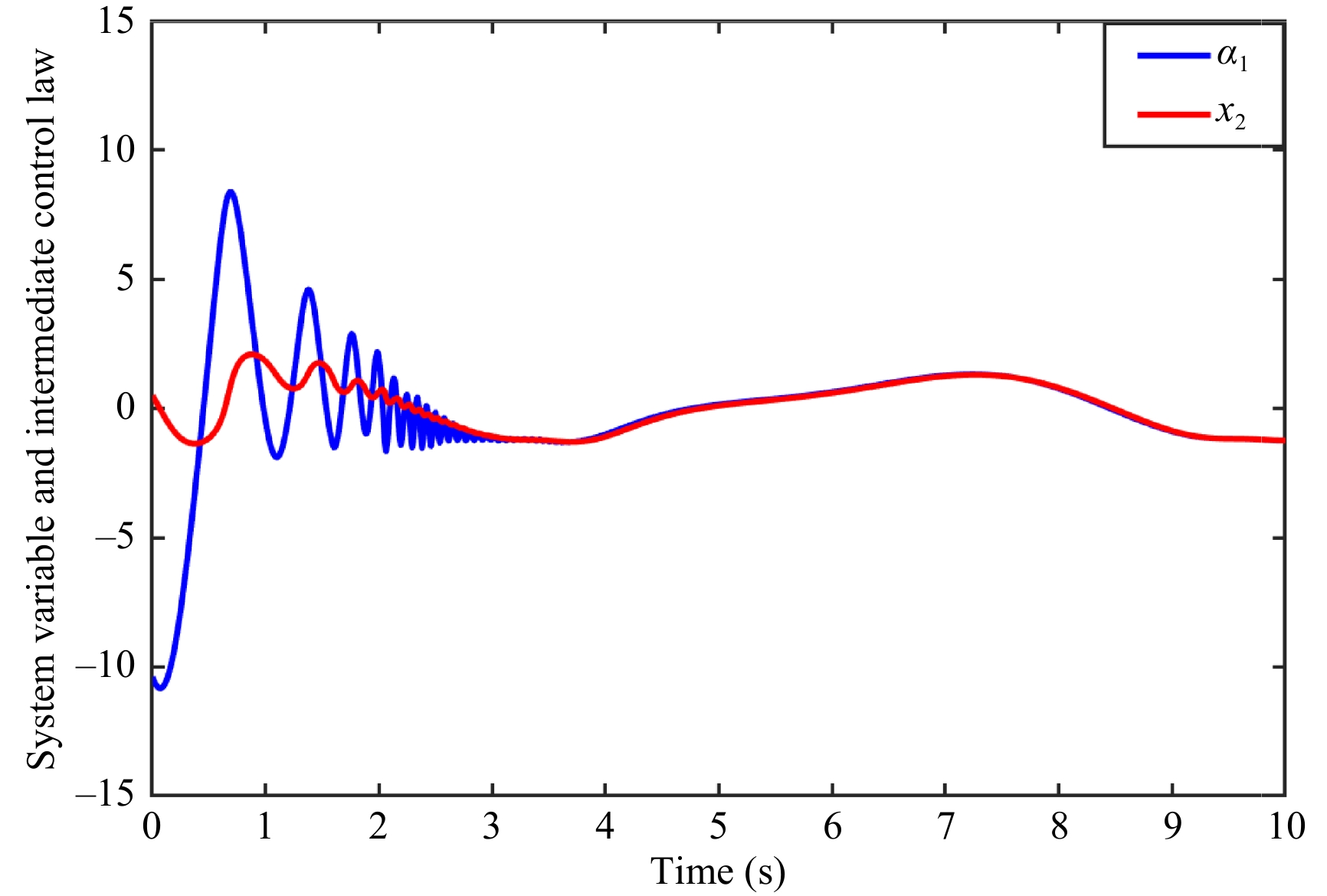
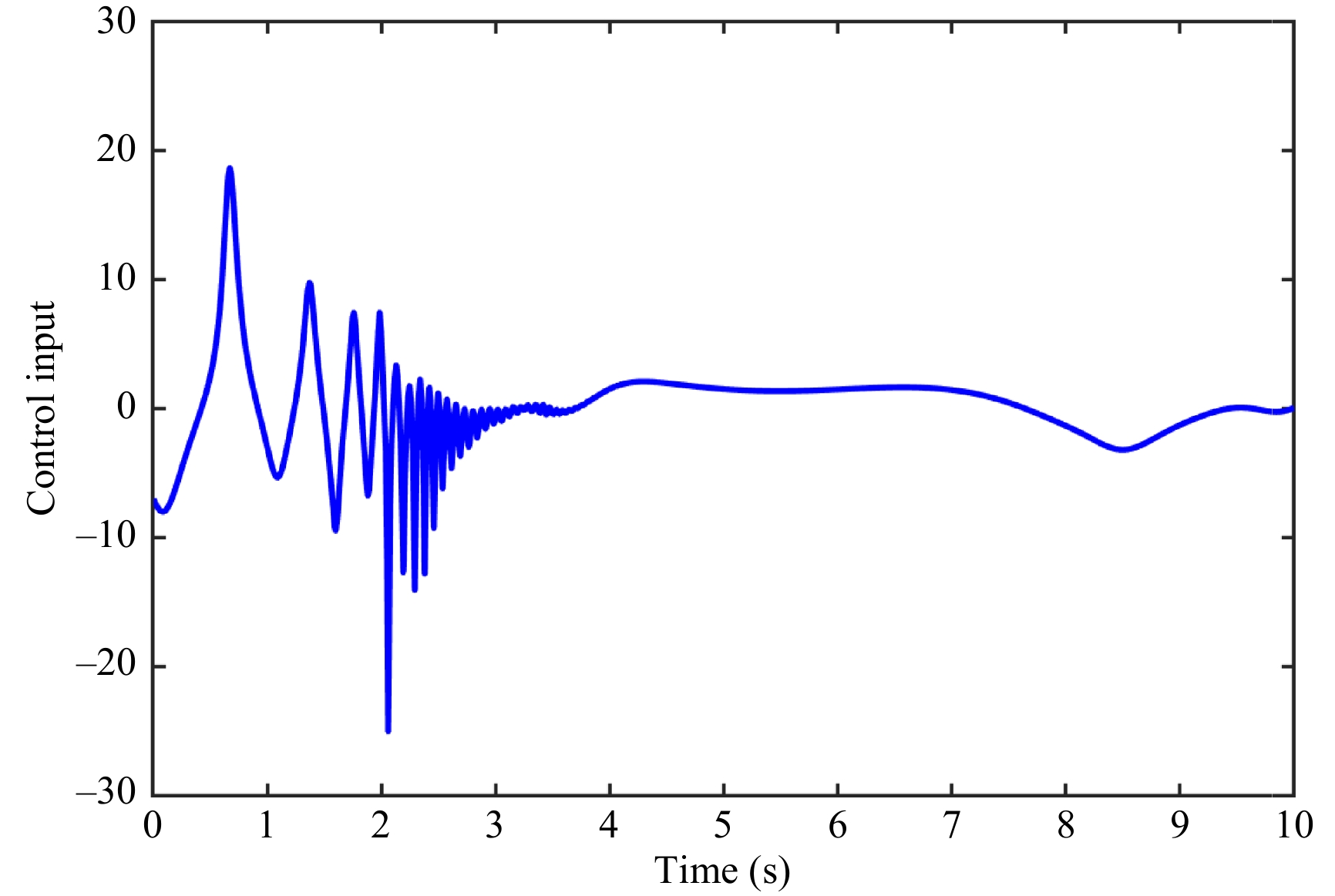
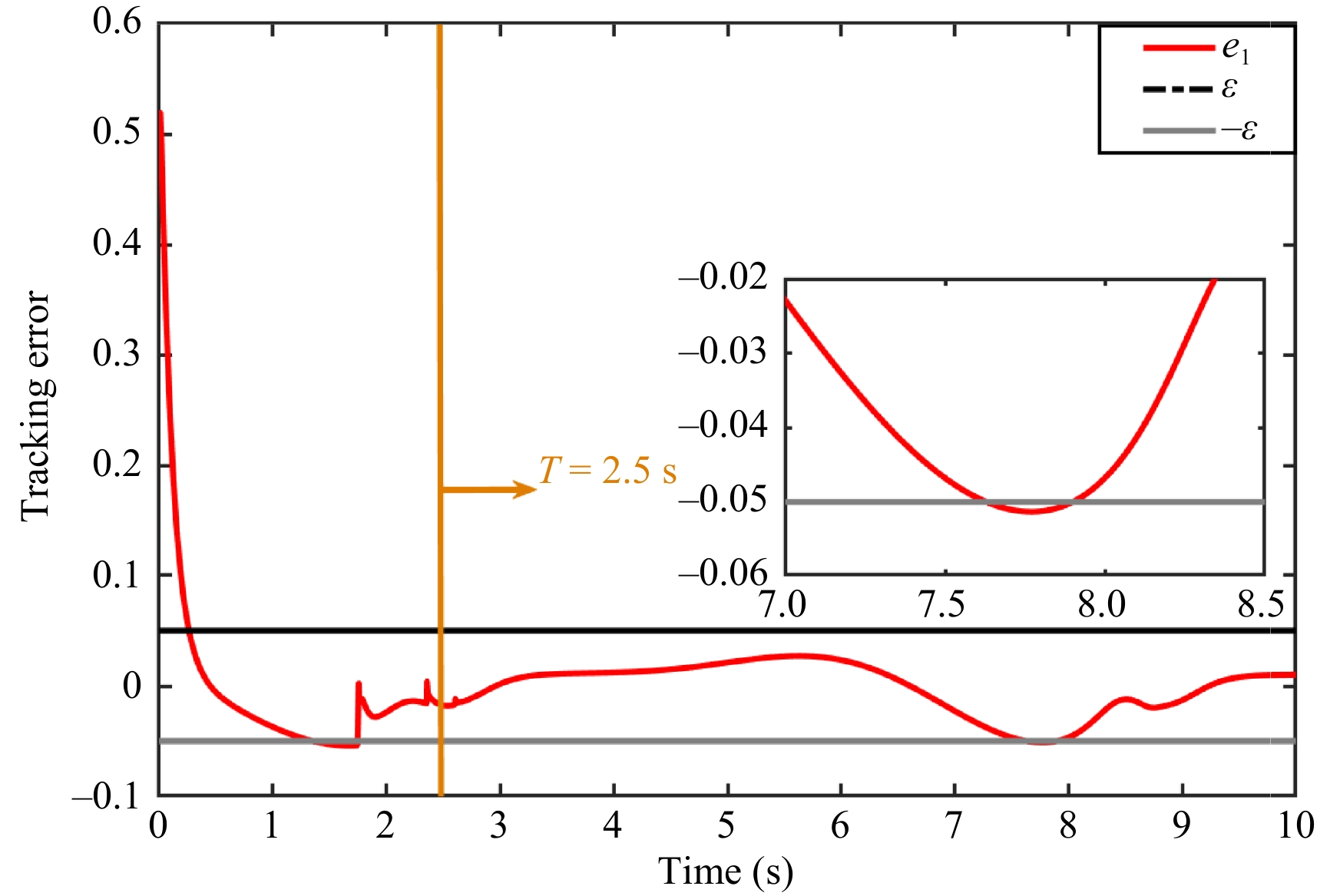
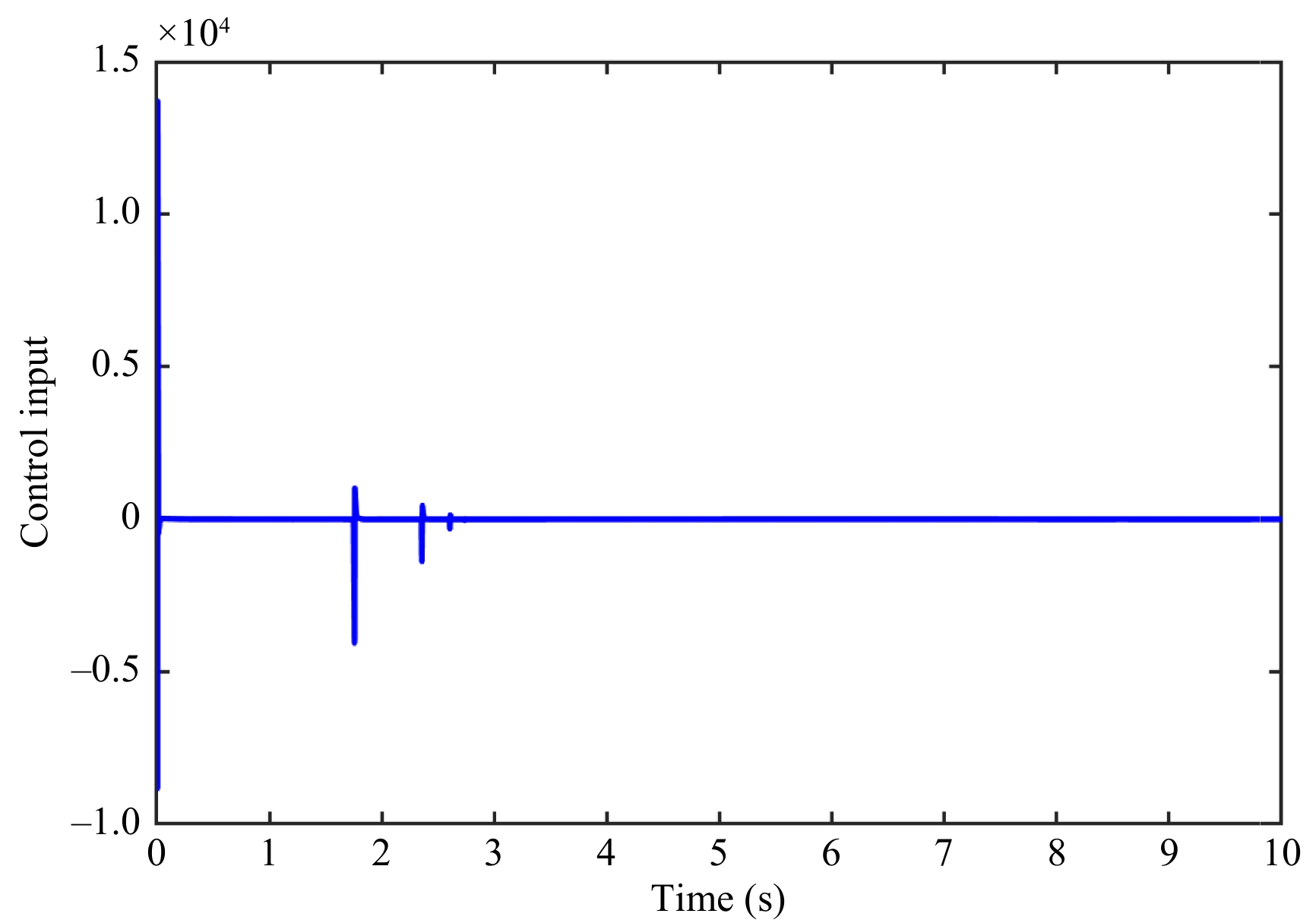
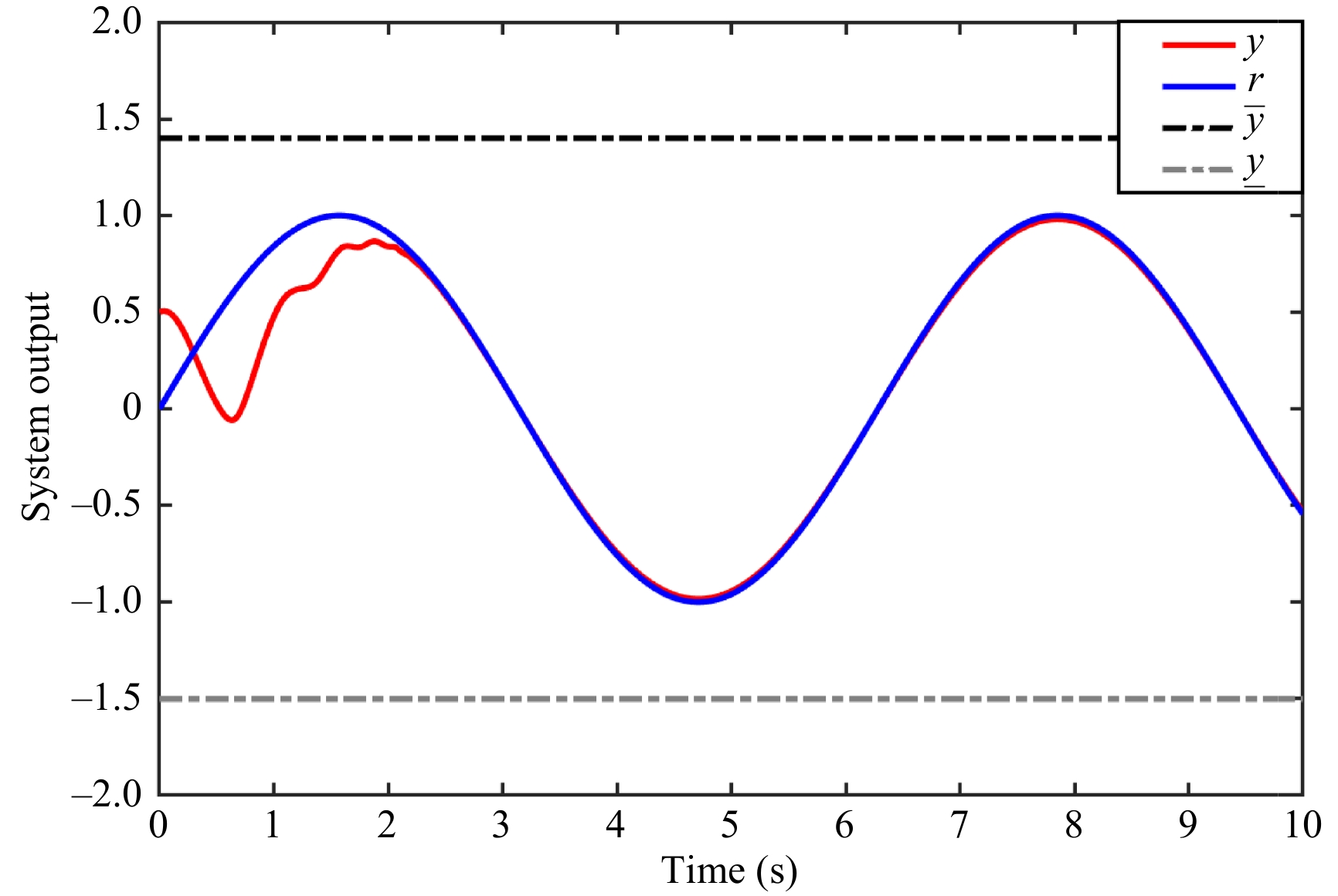
The problem of prescribed performance tracking control for unknown time-delay nonlinear systems subject to output constraints is dealt with in this paper. In contrast with related works, only the most fundamental requirements, i.e., boundedness and the local Lipschitz condition, are assumed for the allowable time delays. Moreover, we focus on the case where the reference is unknown beforehand, which renders the standard prescribed performance control designs under output constraints infeasible. To conquer these challenges, a novel robust prescribed performance control approach is put forward in this paper. Herein, a reverse tuning function is skillfully constructed and automatically generates a performance envelop for the tracking error. In addition, a unified performance analysis framework based on proof by contradiction and the barrier function is established to reveal the inherent robustness of the control system against the time delays. It turns out that the system output tracks the reference with a preassigned settling time and good accuracy, without constraint violations. A comparative simulation on a two-stage chemical reactor is carried out to illustrate the above theoretical findings.

| [1] |
S. L. Niculescu, Delay Effects on Stability: A Robust Control Approach. New York, USA: Springer-Verlag, 2001.
|
| [2] |
S. K. Nguang, “Robust stabilization of a class of time-delay nonlinear systems,” IEEE Trans. Autom. Control, vol. 45, no. 4, pp. 756–762, 2000. doi: 10.1109/9.847117
|
| [3] |
M. S. Mahmoud, Robust Control and Filtering for Time-Delay Systems. New York, USA: Marcel Dekker, 2000.
|
| [4] |
B. Lehman, “Stability of chemical reactions in a CSTR with delayed recycle stream,” in Proc. Amer. Control Conf., 1994, vol. 3, pp. 3521–3522.
|
| [5] |
Z. Zhang, B. Xu, C. Tan, and S. Ge, “Adaptive control of uncertain nonlinear time-delay systems with external disturbance,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 52, no. 2, pp. 1288–1295, 2022. doi: 10.1109/TSMC.2020.3017801
|
| [6] |
D. Ho, J. Li, and Y. Niu, “Adaptive neural control for a class of nonlinearly parametric time-delay systems,” IEEE Trans. Neural Netw., vol. 16, no. 3, pp. 625–635, 2005. doi: 10.1109/TNN.2005.844907
|
| [7] |
W. Sun, Y. Wu, and X. Lv, “Adaptive neural network control for full-state constrained robotic manipulator with actuator saturation and time-varying delays,” IEEE Trans. Neural Networks Learn. Syst., vol. 33, no. 8, pp. 3331–3342, 2022. doi: 10.1109/TNNLS.2021.3051946
|
| [8] |
D. Li, D. Li, Y. Liu, S. Tong, and C. Chen, “Approximation-based adaptive neural tracking control of nonlinear MIMO unknown time-varying delay systems with full state constraints,” IEEE Trans. Cybern., vol. 47, no. 10, pp. 3100–3109, 2017. doi: 10.1109/TCYB.2017.2707178
|
| [9] |
Y. Xie and Q. Ma, “Adaptive event-triggered neural network control for switching nonlinear systems with time delays,” IEEE Trans. Neural Networks Learn. Syst., vol. 34, no. 2, pp. 729–738, 2023. doi: 10.1109/TNNLS.2021.3100533
|
| [10] |
J. Wei, Y. Hu, and M. Sun, “Adaptive iterative learning control for a class of nonlinear time-varying systems with unknown delays and input dead-zone,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 3, pp. 302–314, 2014. doi: 10.1109/JAS.2014.7004688
|
| [11] |
T. Li, Z. Li, D. Wang, and C. Chen, “Output-feedback adaptive neural control for stochastic nonlinear time-varying delay systems with unknown control directions,” IEEE Trans. Neural Networks Learn. Syst., vol. 26, no. 6, pp. 1188–1201, 2015. doi: 10.1109/TNNLS.2014.2334638
|
| [12] |
B. Chen and X. Liu, “Delay-dependent robust H∞ control for T-S fuzzy systems with time delay,” IEEE Trans. Fuzzy Syst., vol. 13, no. 4, pp. 544–556, 2005. doi: 10.1109/TFUZZ.2004.840112
|
| [13] |
C. Peng, D. Yue, and Y. Tian, “New approach on robust delay-dependent H∞ control for uncertain T-S fuzzy systems with interval time-varying delay,” IEEE Trans. Fuzzy Syst., vol. 17, no. 4, pp. 890–900, 2009. doi: 10.1109/TFUZZ.2008.926586
|
| [14] |
H. Tang, Q. Wang, and X. Feng, “Robust stochastic control for high-speed trains with nonlinearity, parametric uncertainty, and multiple time-varying delays,” IEEE Trans. Intell. Transport. Syst., vol. 19, no. 4, pp. 1027–1037, 2018. doi: 10.1109/TITS.2017.2710138
|
| [15] |
X. Jiao and T. Shen, “Adaptive feedback control of nonlinear time-delay systems: The LaSalle-Razumikhin-based approach,” IEEE Trans. Autom. Control, vol. 50, no. 11, pp. 1909–1913, 2005. doi: 10.1109/TAC.2005.854652
|
| [16] |
X. Yan, S. K. Spurgeon, and C. Edwards, “Decentralised stabilisation for nonlinear time delay interconnected systems using static output feedback,” Automatica, vol. 49, no. 2, pp. 633–641, 2013. doi: 10.1016/j.automatica.2012.11.040
|
| [17] |
X. Zhang, L. Baron, Q. Liu, and E. K. Boukas, “Design of stabilizing controllers with a dynamic gain for feedforward nonlinear time-delay systems,” IEEE Trans. Autom. Control, vol. 56, no. 3, pp. 692–697, 2011. doi: 10.1109/TAC.2010.2097150
|
| [18] |
T. Wang, X. Luo, and W. Li, “Razumikhin-type approach on state feedback of stochastic high-order nonlinear systems with time-varying delay,” Int. J. Robust Nonlin. Control, vol. 27, no. 16, pp. 3124–3134, 2017. doi: 10.1002/rnc.3730
|
| [19] |
K. P. Tee, S. Ge, and E. H. Tay, “Barrier Lyapunov functions for the control of output-constrained nonlinear systems,” Automatica, vol. 45, no. 4, pp. 918–927, 2009. doi: 10.1016/j.automatica.2008.11.017
|
| [20] |
Z. Liu, G. Lai, Y. Zhang, and C. Chen, “Adaptive neural output feedback control of output-constrained nonlinear systems with unknown output nonlinearity,” IEEE Trans. Neural Networks Learn. Syst., vol. 26, no. 8, pp. 1789–1802, 2015. doi: 10.1109/TNNLS.2015.2420661
|
| [21] |
Y. Liu, S. Lu, and S. Tong, “Neural network controller design for an uncertain robot with time-varying output constraint,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 47, no. 8, pp. 2060–2068, 2017. doi: 10.1109/TSMC.2016.2606159
|
| [22] |
B. Ren, S. Ge, K. Tee, and T. Lee, “Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function,” IEEE Trans. Neural Netw., vol. 21, no. 8, pp. 1339–1345, 2010. doi: 10.1109/TNN.2010.2047115
|
| [23] |
M. Song, F. Zhang, B. Huang, and P. Huang, “Anti-disturbance control for tethered aircraft system with deferred output constraints,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 474–485, 2023. doi: 10.1109/JAS.2023.123222
|
| [24] |
Y. Yang, Z. Liu, Q. Li, and D. C. Wunsch, “Output constrained adaptive controller design for nonlinear saturation systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 441–454, 2021. doi: 10.1109/JAS.2020.1003524
|
| [25] |
C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance,” IEEE Trans. Autom. Control, vol. 53, no. 9, pp. 2090–2099, 2008. doi: 10.1109/TAC.2008.929402
|
| [26] |
C. P. Bechlioulis and G. A. Rovithakis, “Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems,” Automatica, vol. 45, no. 2, pp. 532–538, 2009. doi: 10.1016/j.automatica.2008.08.012
|
| [27] |
K. Zhao, C. Wen, Y. Song, and F. L. Lewis, “Adaptive uniform performance control of strict-feedback nonlinear systems with time-varying control gain,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 451–461, 2023. doi: 10.1109/JAS.2022.106064
|
| [28] |
J. Zhang and G. Yang, “Fault-tolerant output-constrained control of unknown Euler-Lagrange systems with prescribed tracking accuracy,” Automatica, vol. 111, p. 108606, 2020. doi: 10.1016/j.automatica.2019.108606
|
| [29] |
J. Zhang and G. Yang, “Fault-tolerant leader-follower formation control of marine surface vessels with unknown dynamics and actuator faults,” Int. J. Robust Nonlin. Control, vol. 28, no. 14, pp. 4188–4208, 2018. doi: 10.1002/rnc.4228
|
| [30] |
V. T. J. Antonio, G. Adrien, A. M. Manuel, et al., “Event-triggered leader-following formation control for multi-agent systems under communication faults: Application to a fleet of unmanned aerial vehicles,” J. Syst. Eng,Electron., vol. 32, no. 5, pp. 1014–1022, 2021. doi: 10.23919/JSEE.2021.000086
|
| [31] |
M. Mehrandezh, N. M. Sela, R. G. Fenton, and B. Benhabib, “Robotic interception of moving objects using an augmented ideal proportional navigation guidance technique,” IEEE Trans. Syst.,Man,Cybern. A,Syst,Hum., vol. 30, no. 3, pp. 238–250, 2000. doi: 10.1109/3468.844351
|
| [32] |
E. A. Croft, R. G. Fenton, and B. Benhabib, “Optimal rendezvous-point selection for robotic interception of moving objects,” IEEE Trans. Syst.,Man,Cybern. B,Cybern., vol. 28, no. 2, pp. 192–204, 1998. doi: 10.1109/3477.662759
|
| [33] |
M. Guay, D. Dochain, and M. Perrier, “Adaptive extremum seeking control of continuous stirred tank bioreactors with unknown growth kinetics,” Automatica, vol. 40, no. 5, pp. 881–888, 2004. doi: 10.1016/j.automatica.2004.01.002
|
| [34] |
N. Marcos, M. Guay, T. Zhang, and D. Dochain, “Adaptive extremum-seeking control of a continuous stirred tank bioreactor with Haldane kinetics,” J. Process Contr., vol. 14, no. 3, pp. 317–328, 2004. doi: 10.1016/S0959-1524(03)00070-2
|
| [35] |
S. J. Yoo, J. B. Park, and Y. H. Choi, “Adaptive neural control for a class of strict-feedback nonlinear systems with state time delays,” IEEE Trans. Neural Netw., vol. 20, no. 7, pp. 1209–1215, 2009. doi: 10.1109/TNN.2009.2022159
|
| [36] |
D. Zhai, C. Xi, J. Dong, and Q. Zhang, “Adaptive fuzzy fault-tolerant tracking control of uncertain nonlinear time-varying delay systems,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 50, no. 5, pp. 1840–1849, 2020. doi: 10.1109/TSMC.2018.2789441
|
| [37] |
H. Muramatsu and S. Katsura, “An adaptive periodic-disturbance observer for periodic-disturbance suppression,” IEEE Trans. Ind. Inform., vol. 14, no. 10, pp. 4446–4456, 2018. doi: 10.1109/TII.2018.2804338
|
| [38] |
Z. Ding, “Consensus disturbance rejection with disturbance observers,” IEEE Trans. Ind. Electron., vol. 62, no. 9, pp. 5829–5837, 2015. doi: 10.1109/TIE.2015.2442218
|
| [39] |
M. Wang, X. Liu, and P. Shi, “Adaptive neural control of pure-feedback nonlinear time-delay systems via dynamic surface technique,” IEEE Trans. Syst.,Man,Cybern. B,Cybern., vol. 41, no. 6, pp. 1681–1692, 2011. doi: 10.1109/TSMCB.2011.2159111
|
| [40] |
J. Yu, P. Shi, C. Lin, and H. Yu, “Adaptive neural command filtering control for nonlinear MIMO systems with saturation input and unknown control direction,” IEEE Trans. Cybern., vol. 50, no. 6, pp. 2536–2545, 2020. doi: 10.1109/TCYB.2019.2901250
|
| [41] |
C. Fu, Q. Wang, J. Yu, and C. Lin, “Neural network-based finite-time command filtering control for switched nonlinear systems with backlash-like hysteresis,” IEEE Trans. Neural Networks Learn. Syst., vol. 32, no. 7, pp. 3268–3273, 2021. doi: 10.1109/TNNLS.2020.3009871
|
| [42] |
J. Zhang and G. Yang, “Fuzzy adaptive output feedback control of uncertain nonlinear systems with prescribed performance,” IEEE Trans. Cybern., vol. 48, no. 5, pp. 1342–1354, 2018. doi: 10.1109/TCYB.2017.2692767
|
| [43] |
J. Zhang, Q. Wang, and W. Ding, “Global output-feedback prescribed performance control of nonlinear systems with unknown virtual control coefficients,” IEEE Trans. Autom. Control, vol. 67, no. 12, pp. 6904–6911, 2022. doi: 10.1109/TAC.2021.3137103
|
| [44] |
H. Min, S. Xu, Q. Ma, B. Zhang, and Z. Zhang, “Composite-observer-based output-feedback control for nonlinear time-delay systems with input saturation and its application,” IEEE Trans. Ind. Electron., vol. 65, no. 7, pp. 5856–5863, 2018. doi: 10.1109/TIE.2017.2784347
|
Figures(7)






 DownLoad:
DownLoad: