





























































































































































































































































































































































































































































































































































Figure
1.
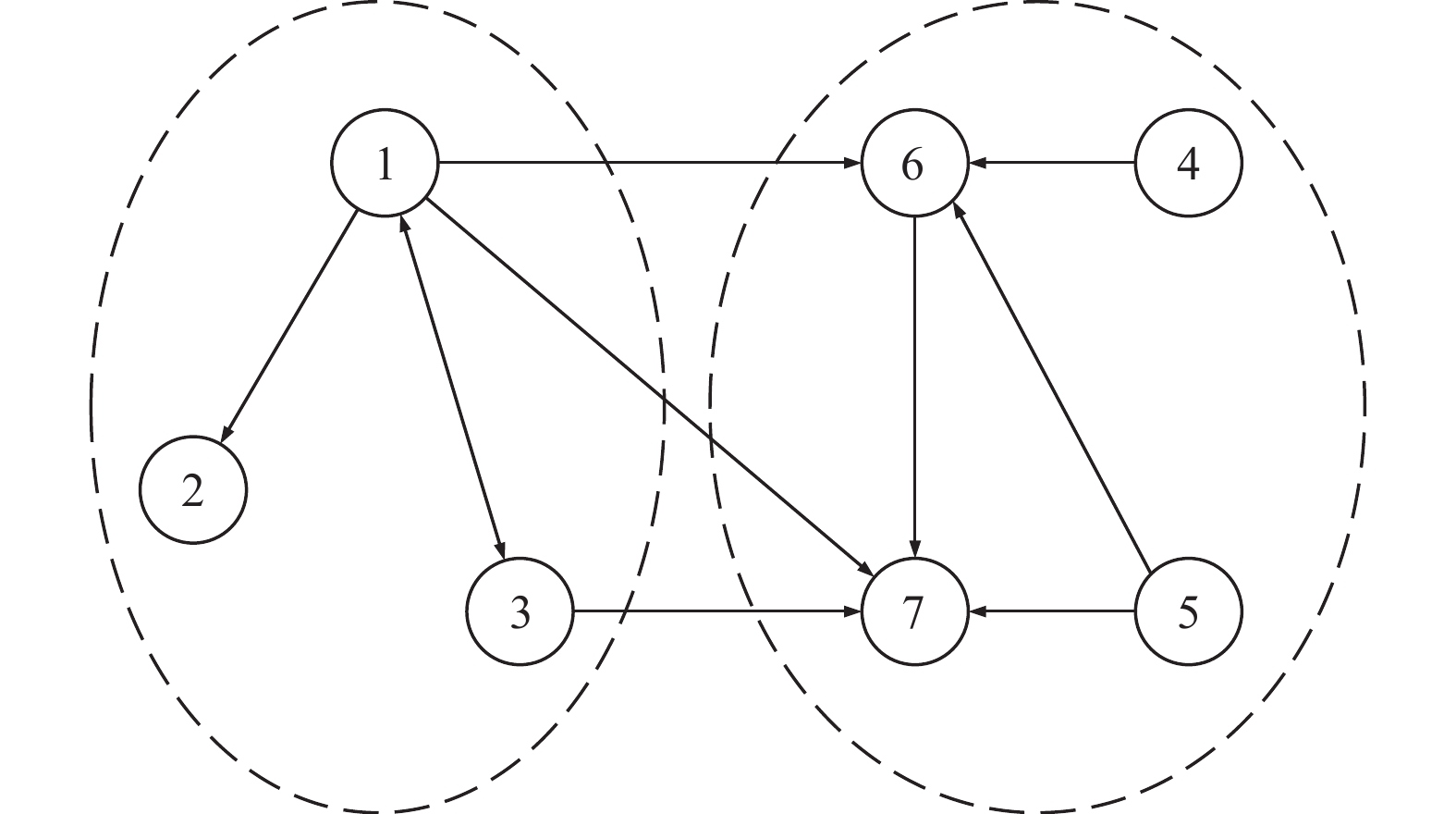
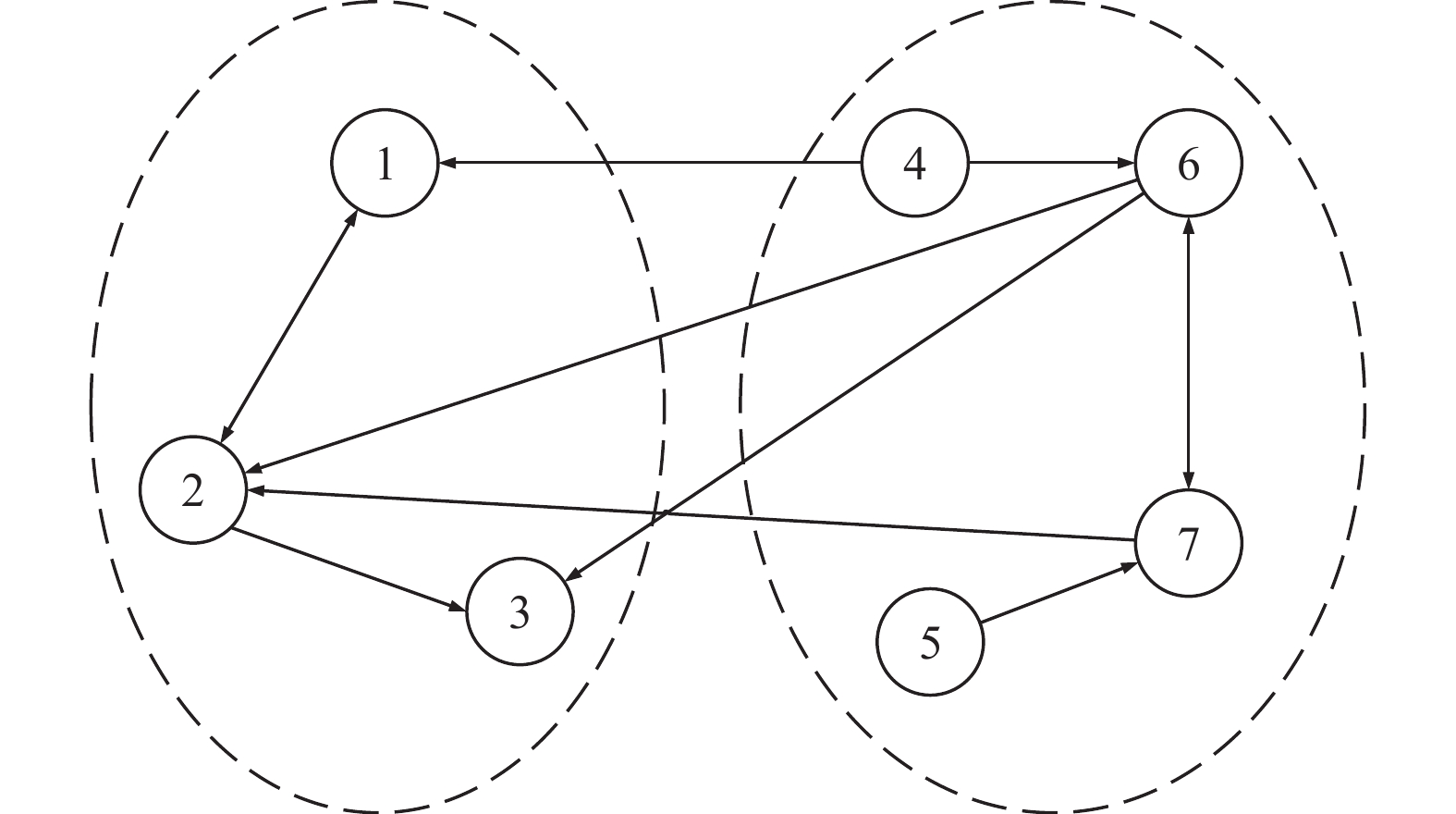
The communication graph: The containment-oriented case.
 Volume 10
Issue 3
Volume 10
Issue 3
IEEE/CAA Journal of Automatica Sinica
| Citation: | C. J. Li and X. F. Zong, “Group hybrid coordination control of multi-agent systems with time-delays and additive noises,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 737–748, Mar. 2023. doi: 10.1109/JAS.2022.105917

|
COORDINATION control of multi-agent systems (MASs) has become an important theme in the control community, including consensus control, containment control and so on. For these problems, fruitful achievements have been obtained. Under time-delays, many consensus results have been obtained [1]–[4]. In general, time-delays have negative impact on consensus, but Yu et al. [4] revealed that appropriate time-delays can play a positive role in delay-induced consensus problems. The effects of additive and multiplicative measurement noises on consensus behaviors were revealed in [5]–[8], [9] and [10], respectively. The consensus problems were studied for MASs with both time-delays and additive noises in [11]–[14].
As a kind of coordination control problem, the containment problem has also received extensive attention. Under a relatively ideal environment, many interesting results about containment problems have been obtained, as shown in [15]–[18]. When time-delays exist in MASs, the research results for the containment problem can be seen in [19]–[21]. The effects of additive noises on containment behaviors were revealed in [22] and the containment control of MASs with both time-delays and additive noises was studied in [23].
It can be seen that the above studies all focused on the problem where agents in a whole system achieve global coordination behavior. However, in some practical application scenarios where multiple tasks such as tracking and striking need to be performed simultaneously, global coordination control may not be able to accomplish these tasks. Hence, it is necessary to investigate group coordination control problems such as group consensus and group containment problems. These require agents in different subgroups to achieve different coordination states. In fact, many scholars have made efforts for solving group coordination control problems. Yu and Wang [24] and [25] studied group consensus under the assumption that the effect between the two subgroups is balanced. Then, the assumption was relaxed in [26] and [27], where the group consensus of MASs with generally connected topology were investigated. Some interesting results about group consensus under measurement noises can be seen in [28] and [29]. The results about the bipartite consensus problem can be found in [30]–[32].
Note that the aforementioned works about group coordination control all focused on the problem that all subgroups achieve consensus behavior. However, agents in different subgroups may be required to achieve different coordination behaviors for some multi-objective tasks such as military tasks [33]. Moreover, for opinion dynamics in social networks, there may appear agreement or fluctuation which need to be characterized by different coordination behaviors in a whole organization [34]. Hence, it is natural to think about the conditions that consensus can be achieved for one subgroup and containment be achieved for another subgroup in a whole MAS. This problem is called group hybrid coordination control problem, which has not been addressed, even in an ideal environment.
In this paper, we study the group hybrid coordination control problem of MASs with both time-delays and additive noises. We consider a whole MAS that consists of two subgroups, where communications between the two subgroups are unidirectional and only one subgroup can receive information from another subgroup. The case where a subgroup receiving information from another subgroup is required to achieve containment is called the containment-oriented case. Similarly, the case where the subgroup receiving information from another subgroup is required to achieve consensus is called the consensus-oriented case. Since there are communications between the two subgroups and different subgroups are required to achieve different coordination behaviors for a whole MAS, the system dynamics cannot simply be analyzed as a whole. This makes the existing control protocols, methods and conditions, such as those in [14], [22], and [24]–[32], fail to solve the group hybrid coordination control problem. Then, in this paper, our goal is to explore appropriate analysis methods and obtain some conditions for solving the new kind of group coordination control problem, i.e., the group hybrid coordination control problem of MASs with time-delays and additive noises.
The main contribution of this paper can be concluded as follows.
1) A new kind of group coordination control problem-group hybrid coordination control is investigated and two new group control protocols are designed to solve this problem. By developing a new analysis idea, some sufficient conditions and necessary conditions are obtained for the group hybrid coordination control problem under time-delays and additive noises. It is found that the conditions for the containment-oriented case are weaker than those for the consensus-oriented case. And for the consensus-oriented case, the conditions for weak consensus are weaker than those for strong consensus.
2) The influence mechanism of the communication impact between the two subgroups on group hybrid coordination control problem of MASs with both time-delays and additive noises is revealed: the decay of the communication impact between the two subgroups is necessary for the consensus-oriented case. This provides hints in the design of control gain functions for the similar group coordination control problem.
The structure of this paper is organized like this: In Section II, the system model, some basic concepts, and lemmas are introduced. Sections III and IV investigate the containment-oriented case and the consensus-oriented case, respectively. Some simulation results are given in Section V. Section VI summarizes this work and gives some other interesting questions for future research.
Notations: The following notations are used in the process of analysis.
Let
In this paper,
| ˙xi(t)=ui(t),i=1,…,n+m | (1) |
where
In this paper, we require the agents in subgroup
Assumption 1:
In the communication environment considered in this paper, the exchange of state information between agents can not be performed accurately. It is often assumed that the agent i can receive information from its neighbors as follows:
| yji(t)=xj(t−τ)+σjiηji(t),j∈Ni,t>0 |
where
In this paper, independent Gaussian white noises are used to model the measurement noises.
Assumption 2: The stochastic process
In this paper, the goal of group hybrid coordination control is to achieve consensus for subgroup
Definition 1 [14]: For all distinct agents
Definition 2 [14]: For all agents i in a subgroup Ψ, if there is a random variable
Definition 3 [22]: For all followers i in a subgroup Ψ, if there exist deterministic variables
Remark 1: In general, under a stochastic background system, the coordination control problems of MASs are studied in the mean square and almost sure senses. Compared with mean square coordination behaviors, almost sure coordination behaviors are more intuitive and acceptable. This paper will study group hybrid coordination control problem in both senses.
Based on above definitions of consensus and containment, we make the following statement: the agents in a subgroup Ψ are said to achieve stochastic consensus (or stochastic containment) if the agents in this subgroup achieve consensus (or containment) in both the mean square and almost sure senses. Then, in this paper, the following two types of group hybrid coordination behavior will be investigated for both the containment-oriented case and consensus-oriented case: 1) Agents in subgroup
To study group hybrid coordination control under time-delays and additive noises, we need two important lemmas as follows.
Lemma 1 [14]: Suppose that the directed graph contains a spanning tree. For the Laplacian matrix
1) There exists a probability measure π such that
2) There exists a nonsingular matrix
| \begin{equation*} Q^{-1} = \begin{pmatrix} \upsilon^T \\ \overline{Q} \end{pmatrix},\;\; Q^{-1}{\cal{ L}}'Q = \begin{pmatrix} 0 & 0 \\ 0 & \widetilde{{\cal{ L}}}' \end{pmatrix} \end{equation*} |
where n is the number of nodes,
3) The directed graph contains a spanning tree if and only if each eigenvalue of
Lemma 2 [14]: For the linear scalar equation
| \dot {\bar X}(t)=-\lambda c(t)\bar X(t-\tau),\;\; t>0 |
| \frac{\partial}{\partial t} \Gamma(t,s)=-\lambda c(t)\Gamma(t-\tau,s),\;\; t>s. |
If there is a constant
| \vert\Gamma(t,s)\vert^2\le b(\lambda)e^{-\varrho (\lambda)\int_{s}^{t}c(u)du},\;\; t>s\ge t_0 |
here,
Remark 2: Lemmas 1 and 2 are powerful for analyzing the group hybrid coordination control problem of MASs with time-delays and additive noises. In fact, after fully mining the properties of
In this paper, according to the topology structure of
| {\cal{ L}} = \begin{pmatrix} {\cal{ L}}_{11} & {\cal{ L}}_{12} \\ {\cal{ L}}_{21} & {\cal{ L}}_{22} \end{pmatrix} |
where
| l_{ij}= \begin{cases} -a_{ij}, & j\neq i \\ \displaystyle\sum\limits_{k=1,k\neq i}^{n+m} a_{ik}, & j=i \end{cases} |
and
| {\cal{ L}}_{21}=\begin{pmatrix} 0 \\ {\cal{{\widehat{L}}}}_{21} \end{pmatrix}, \;\;{\cal{ L}}_{22} = \begin{pmatrix} 0 & 0 \\ {\cal{\widetilde{L}}}_{22} & {\cal{{\widehat{L}}}}_{22} \end{pmatrix} |
where
Then, in next two sections, we will study the group hybrid coordination control problem in detail. By examining the containment-oriented case and consensus-oriented case respectively, we will obtain some useful results and find some interesting phenomena for group hybrid coordination behaviors under time-delays and additive noises.
For the containment-oriented case, we give the following assumption for the communications between the two subgroups.
Assumption 3: The followers in subgroup
Then, under this communication model, we assume that each agent can receive its neighbor information in the following form:
| \begin{cases} \bar y_{ji}(t)=x_j(t-\tau)+\sigma_{ji}\eta_{ji}(t),\;\; i\in {\cal{ V}}_1,\;\;j\in N_i \\ \bar{\bar y}_{ji}(t)=\bar{\bar y}_{ji1}(t)+\bar{\bar y}_{ji2}(t),\;\; i\in {\cal{ V}}_2,\;\;j\in N_i \end{cases} |
where
Remark 3: Note that there are communications between the two subgroups. This means that the MAS is still a whole system. Under the assumption that the in-degrees from the other subgroups are equal at any time for each node in one subgroup, Shang [28] concluded that the group consensus behavior can be reached under appropriate time-delay and multiplicative noise intensity. Under time-delays and additive noises, we determine to study the group hybrid coordination control problem when the assumption mentioned above is released. This is a key problem that will be explored in this paper.
Based on interactions between any two agents in the environment with both time-delays and additive noises, we propose the control protocol as follows:
| u_i(t) = \begin{cases} c_1(t)\displaystyle\sum\limits_{j=1}^{n} a_{ij}(\bar y_{ji}(t) - x_i(t-\tau)), \;\;\forall i\in {\cal{ V}}_1 \\ c_2(t)\displaystyle\sum\limits_{j=n+1}^{n+m} a_{ij}(\bar{\bar y}_{ji1}(t) - x_i(t-\tau)) \\ \qquad + c_2(t)\displaystyle\sum\limits_{j=1}^{n} a_{ij}\bar{\bar y}_{ji2}(t),\;\; \forall i\in {\cal{ V}}_2 \end{cases} | (2) |
where
Remark 4: Obviously, the communications between agents in the same subgroup and in different subgroups are considered in this protocol. In fact, the group control protocol (2), which considers time-delay, noise and the communication intensity
Under protocol (2), from (1) we can obtain the following equations:
| \begin{equation} \dot X_1(t) = -c_1(t){\cal{ L}}_{11}X_1(t-\tau) + c_1(t)\sum\limits_{i,j=1}^{n} a_{ij}\sigma_{ji}\vartheta_{n,i}\eta_{ji}(t) \end{equation} | (3) |
and
| \begin{split} \dot X_2(t) =\; & -c_2(t)\overline {{\cal{ L}}}_{22}X_2(t-\tau) -c_2(t)\kappa(t){\cal{ L}}_{21}X_1(t-\tau) \\ & +c_2(t)\sum\limits_{i,j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{m,i-n}\eta_{ji}(t) \\ & +c_2(t)\kappa(t)\sum\limits_{i=n+1}^{n+m}\sum\limits_{j=1}^{n} a_{ij}\sigma_{ji}\vartheta_{m,i-n}\eta_{ji}(t) \end{split} | (4) |
where
| \bar l_{ij}= \begin{cases} -a_{ij}, & j\neq i,\;\; i\in {\cal{ V}}_2,\;\;j\in N_{2i} \\ \displaystyle\sum\limits_{k=n+1,k\neq i}^{n+m} a_{ik}, & j=i, \;\;i\in {\cal{ V}}_2,\;\;j\in N_{2i}. \end{cases} |
Moreover, we rewrite
| \overline{{\cal{ L}}}_{22} = \begin{pmatrix} 0 & 0 \\ {\cal{\widetilde{L}}}_{22} & \widehat{{\cal{L}}}_{22}' \end{pmatrix} |
where
From Assumption 1 we know that each eigenvalue of
Assumption 4: There exists a constant
According to the interactions between agents in subgroup
(C1)
(C2)
(C3)
Remark 5: For MASs with both time-delays and additive noises, conditions (C1)−(C3) have been explored for the weak consensus problem in both the two senses mentioned above [14]. It can be seen that the form of condition (C3) is more complex, but it can reflect the decay rate of the control gain function accurately and help us to design a more suitable control protocol.
However, for subgroup
(C4)
(C5)
(C6)
(C7)
Remark 6: Conditions (C4)−(C6) are sufficient for both the global stochastic weak consensus and stochastic containment. For solving the group hybrid coordination control problem of MASs with both time-delays and additive noises, condition (C7) related to the communication intensity between the two subgroups is given. It reveals the influence of the communication impact between the two subgroups and gives a hint that we can impose the joint condition on
Theorem 1: For the MAS (1), suppose that Assumptions 1−4 hold. Then, under protocol (2), the MAS (1) can achieve group hybrid coordination behavior with stochastic weak consensus and stochastic containment if (C1)−(C7) hold.
Proof: Here, we will examine the two subgroups respectively. First, we consider the agents in subgroup
| \begin{equation*} d\bar \psi(t) = -c_1(t)\widetilde {{\cal{ L}}}_{11}\bar \psi(t-\tau)dt + dM(t)\end{equation*} |
where
| \begin{equation} d\bar\gamma(t)=-c_1(t) \widetilde {{\cal{ L}}}_{11} \bar\gamma(t-\tau)dt+dM'(t) \end{equation} | (5) |
where
| \begin{equation} dX_{21}(t)=0 \end{equation} | (6) |
and
| \begin{split} dX_{22}(t)= \;& -c_2(t)({\cal{\widetilde{L}}}_{22}X_{21}(t-\tau)+\widehat{{\cal{L}}}_{22}'X_{22}(t-\tau))dt \\ & -c_2(t)\kappa(t){\cal{{\widehat{L}}}}_{21}X_1(t-\tau)dt \\ & +c_2(t)V_1(t) +c_2(t)\kappa(t)V_2(t) \end{split} | (7) |
where
| \begin{split} d\overline X_{22}(t)=\; & -c_2(t)\widehat{{\cal{L}}}_{22}'\overline X_{22}(t-\tau)dt \\ & -c_2(t)\kappa(t){\cal{{\widehat{L}}}}_{21}X_1(t-\tau)dt \\ & +c_2(t)V_1(t) +c_2(t)\kappa(t)V_2(t). \end{split} | (8) |
From the above analysis, we have
| \begin{split} d\overline X_{22}(t)= \;& -c_2(t)\widehat{{\cal{L}}}_{22}'\overline X_{22}(t-\tau)dt-c_2(t)\kappa(t)P\gamma(t-\tau)dt \\ & +c_2(t)V_1(t) +c_2(t)\kappa(t)V_2(t) \end{split} | (9) |
where
| \begin{split} d\varphi_k(t)=\;& -c_2(t)J_{\lambda_k,n_k}\varphi_k(t-\tau)dt \\ &-c_2(t)\kappa(t)D(k)\gamma(t-\tau)dt \\ & + R(k)d\bar M(t)+ R(k)d\bar M'(t). \end{split} | (10) |
From (10) we obtain the following semi-decoupled equations:
| \begin{split} d\varphi_{k,n_k}(t)= & -c_2(t)\lambda_k\varphi_{k,n_k}(t-\tau)dt \\ &-c_2(t)\kappa(t)D_{k,n_k}\gamma(t-\tau)dt \\ & + d\bar M_{k,n_k}(t)+ d\bar M_{k,n_k}'(t) \end{split} | (11) |
and
| \begin{split} d\varphi_{k,j}(t)= \; & -c_2(t)\lambda_k\varphi_{k,j}(t-\tau)dt-c_2(t)\varphi_{k,j+1}(t-\tau)dt \\ & -c_2(t)\kappa(t)D_{k,j}\gamma(t-\tau)dt \\ & +d\bar M_{k,j}(t)+d\bar M_{k,j}'(t),\;\; j=1,\ldots,n_k-1 \end{split} | (12) |
where
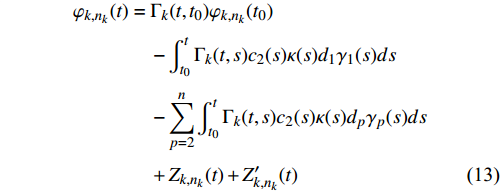
| \begin{split} \varphi_{k,n_k}(t)= \; & \Gamma_k(t,t_0)\varphi_{k,n_k}(t_0) \\ & -\int_{t_0}^{t} \Gamma_k(t,s)c_2(s)\kappa(s)d_1\gamma_1(s)ds \\ & -\sum_{p=2}^{n}\int_{t_0}^{t} \Gamma_k(t,s)c_2(s)\kappa(s)d_p\gamma_p(s)ds \\ & +Z_{k,n_k}(t)+Z_{k,n_k}'(t) \end{split} | (13) |
where
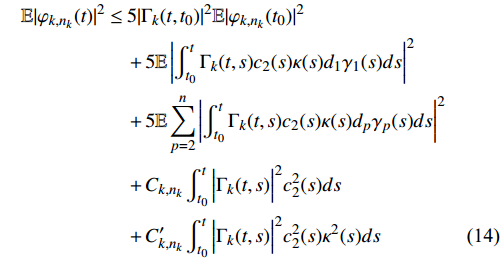
| \begin{split} \mathbb{E}{| \varphi_{k,n_k}(t)|}^2 \le\; & 5|\Gamma_k(t,t_0)|^2 \mathbb{E}{| \varphi_{k,n_k}(t_0)|}^2 \\ & +5\mathbb{E} \left|\int_{t_0}^{t} \Gamma_k(t,s)c_2(s)\kappa(s)d_1\gamma_1(s)ds\right|^2 \\ & +5\mathbb{E} \sum_{p=2}^{n}\left|\int_{t_0}^{t} \Gamma_k(t,s)c_2(s)\kappa(s)d_p\gamma_p(s)ds\right|^2 \\ & +C_{k,n_k}\int_{t_0}^{t} \Big|\Gamma_k(t,s)\Big|^2c_2^2(s)ds \\ & +C_{k,n_k}' \int_{t_0}^{t} \Big|\Gamma_k(t,s)\Big|^2c_2^2(s)\kappa^2(s)ds \end{split} | (14) |
where
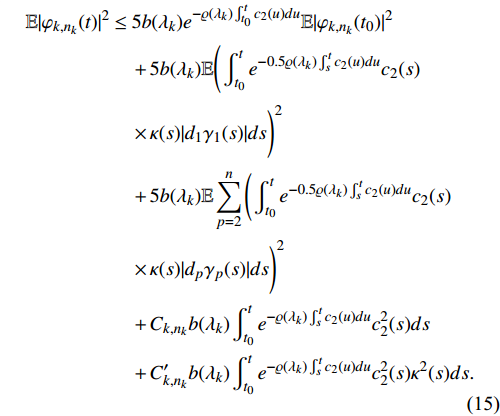
| \begin{split} \mathbb{E}{| \varphi_{k,n_k}(t)|}^2 \le\; & 5b(\lambda_k)e^{-\varrho(\lambda_k)\int_{t_0}^{t}c_2(u)du} \mathbb{E}{| \varphi_{k,n_k}(t_0)|}^2 \\ &+5b(\lambda_k)\mathbb{E}\Bigg(\int_{t_0}^{t}e^{-0.5\varrho(\lambda_k)\int_{s}^{t}c_2(u)du}c_2(s) \\ & \times \kappa(s)|d_1\gamma_1(s)|ds\Bigg)^2 \\ &+5b(\lambda_k)\mathbb{E} \sum_{p=2}^{n}\Bigg(\int_{t_0}^{t}e^{-0.5\varrho(\lambda_k)\int_{s}^{t}c_2(u)du}c_2(s) \\ & \times\kappa(s)|d_p\gamma_p(s)|ds\Bigg)^2 \\ & +C_{k,n_k}b(\lambda_k)\int_{t_0}^{t}e^{-\varrho(\lambda_k)\int_{s}^{t}c_2(u)du} c_2^2(s)ds \\ & +C_{k,n_k}'b(\lambda_k) \int_{t_0}^{t} e^{-\varrho(\lambda_k)\int_{s}^{t}c_2(u)du}c_2^2(s)\kappa^2(s)ds. \end{split} | (15) |
We now need to prove that the second term, the third term and the last term on the right hand side of (15) vanish in infinite time because other terms go toward zero, which can be obtained from [5] and [14]. We first consider the second term mentioned above. Fix the k and write
| \begin{align*} \lim_{t\to \infty} \sqrt{\mathbb{E}(U(t))^2}\le\; &\lim_{t\to \infty}\frac{\sqrt{\mathbb{E}|d_1\gamma_1(t)|^2}\kappa(t)}{0.5\varrho(\lambda_k)} \\ \le\;&\lim_{t\to \infty} \frac {\sqrt{c_3\int_{0}^{t}c_1^2(s)ds+c_4\mathbb{E}\Vert\Delta_1\Vert^2}\kappa(t)}{0.5\varrho(\lambda_k)} \end{align*} |
where
| \begin{equation} \begin{split} &\lim_{t\to \infty}\int_{0}^{t} e^{-0.5\varrho(\lambda_k) \int_{s}^{t}c_2(u)du}c_2^2(s)\kappa^2(s)ds \\ &\qquad =\lim_{t\to \infty}\frac{\int_{0}^{t} e^{0.5\varrho(\lambda_k) \int_{0}^{s}c_2(u)du}c_2^2(s)\kappa^2(s)ds}{e^{0.5\varrho(\lambda_k)\int_{0}^{t}c_2(u)du}} \\ & \qquad=\lim_{t\to \infty}\frac{c_2(t)\kappa^2(t)}{0.5\varrho(\lambda_k)}=0 \end{split} \end{equation} | (16) |
then
| \begin{equation} \lim_{t\to \infty} \mathbb E{\Vert\overline X_{22}(t)\Vert}^2=0. \end{equation} | (17) |
We still consider the kth Jordan block. Similar to the definition of
| \begin{equation} \begin{split} d\theta_{k,n_k}(t)=\;& -c_2(t)\lambda_k\theta_{k,n_k}(t-\tau)dt+c_2(t)g_{k,n_k}(t)dt \\ & +c_2(t)\kappa(t)h_{k,n_k}(t)dt \end{split} \end{equation} | (18) |
where
| \begin{split} \lim_{t\to \infty} {\Vert\overline X_{22}(t)\Vert}=0. \end{split} | (19) |
From (17), (19) and the definition of
For agents in subgroup
(C8)
Then, we have the following theorem.
Theorem 2: For the MAS (1), suppose that Assumptions 1−4 hold. Then, under protocol (2), the MAS (1) can achieve group hybrid coordination behavior with stochastic strong consensus and stochastic containment if (C1)−(C8) hold, and only if (C1) and (C8) hold.
Proof: We first prove the “if ” part. We now consider the agents in subgroup
Above, we explored the group hybrid coordination control problem for the containment-oriented case and obtained some interesting results. Then, for the consensus-oriented case, we need to determine if the above conditions sufficient. We will explore this problem in Section IV.
To examine the consensus-oriented case, we first give the following assumption for the communications between the two subgroups.
Assumption 5: The agents in subgroup
Based on the interactions between any two agents under the communication mode mentioned above, we give the control protocol as follows:
| \begin{equation} u_i(t) = \left\{ \begin{aligned} &c_1(t)\sum_{j=1}^{n} a_{ij}(\bar y_{ji1}(t) - x_i(t-\tau)) \\ &\qquad+ c_1(t)\sum_{j=n+1}^{n+m} a_{ij}\bar y_{ji2}(t),\;\; \forall i\in {\cal{ V}}_1 \\ &c_2(t)\sum_{j=n+1}^{n+m} a_{ij}(\bar{\bar y}_{ji}(t) - x_i(t-\tau)),\;\; \forall i\in {\cal{ V}}_2 \end{aligned}\right. \end{equation} | (20) |
where
Under protocol (20), from (1), we obtain the following equations:
| \begin{split} \dot X_1(t) = \;& -c_1(t)\overline{{\cal{ L}}}_{11}X_1(t-\tau) -c_1(t)\kappa(t){\cal{ L}}_{12}X_2(t-\tau) \\ & + c_1(t)\sum_{i,j=1}^{n} a_{ij}\sigma_{ji}\vartheta_{n,i}\eta_{ji}(t) \\ & +c_1(t)\kappa(t)\sum_{i=1}^{n}\sum_{j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{n,i}\eta_{ji}(t) \end{split} | (21) |
and
| \begin{split} \dot X_2(t) =\;& -c_2(t){\cal{ L}}_{22}X_2(t-\tau) \\ & +c_2(t)\sum_{i,j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{m,i-n}\eta_{ji}(t) \end{split} | (22) |
where
| \bar l_{ij}=\left\{ \begin{aligned} & -a_{ij}, & j\neq i,\;\; i\in {\cal{ V}}_1,\;\;j\in N_{1i} \\ &\sum_{k=1,k\neq i}^{n} a_{ik}, & j=i, \;\;i\in {\cal{ V}}_1,\;\;j\in N_{1i} \end{aligned} \right. |
and it is the Laplacian matrix of
Similarly, from Assumption 1 we know that each eigenvalue of
Assumption 6: There exists a constant
To investigate this kind of group hybrid coordination behavior for the consensus-oriented case, we need the following condition:
(C9)
Theorem 3: For the MAS (1), suppose that Assumptions 1, 2, 5 and 6 hold. Then, under protocol (20), the MAS (1) can achieve group hybrid coordination behavior with stochastic weak consensus and stochastic containment if (C1)−(C6) and (C9) hold.
Proof: We first consider the stochastic containment problem of subgroup
| \begin{align*} dX_{22}(t)=\; & -c_2(t)({\cal{\widetilde{L}}}_{22}X_{21}(t-\tau)+\widehat{{\cal{L}}}_{22}X_{22}(t-\tau))dt \\ & +c_2(t)\sum_{i=n+a+1}^{n+m}\sum_{j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{m-a,i-n-a}d\omega_{ji}(t). \end{align*} |
Letting
| \begin{align*} d\overline X_{22}(t)=\; & -c_2(t)\widehat{{\cal{L}}}_{22}\overline X_{22}(t-\tau)dt \\ & +c_2(t)\sum_{i=n+a+1}^{n+m}\sum_{j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{m-a,i-n-a}d\omega_{ji}(t). \end{align*} |
From the above analysis, we can obtain
| \begin{split} d X_1(t) = \;& -c_1(t)\overline{{\cal{ L}}}_{11}X_1(t-\tau)dt -c_1(t)\kappa(t){\cal{ L}}_{12}\bar X(t-\tau)dt \\ & + c_1(t)\sum_{i,j=1}^{n} a_{ij}\sigma_{ji}\vartheta_{n,i}d\omega_{ji}(t) \\ & +c_1(t)\kappa(t)\sum_{i=1}^{n}\sum_{j=n+1}^{n+m} a_{ij}\sigma_{ji}\vartheta_{n,i}d\omega_{ji}(t) \end{split} | (23) |
where
| \begin{split} d\bar \xi(t) = \;& -c_1(t)\widetilde {{\cal{ L}}}'_{11}\bar \xi(t-\tau)dt-c_2(t)\kappa(t)H\bar X(t-\tau)dt \\ & + dW(t)+d\bar W(t) \end{split} | (24) |
where
| \begin{split} d\zeta_k(t)=\; & -c_1(t)J_{\lambda_k,n_k}\zeta_k(t-\tau)dt \\ & -c_1(t)\kappa(t)\bar D(k)\bar X(t-\tau)dt \\ &+ \bar R(k)dW(t)+ \bar R(k)d\bar W(t). \end{split} | (25) |
We further get the following semi-decoupled equations:
| \begin{split} d\zeta_{k,n_k}(t)= \; & -c_1(t)\lambda_k\zeta_{k,n_k}(t-\tau)dt \\ & -c_1(t)\kappa(t)\bar D_{k,n_k}\bar X(t-\tau)dt \\ & + dW_{k,n_k}(t)+ d\bar W_{k,n_k}(t) \end{split} | (26) |
and
| \begin{split} d\zeta_{k,j}(t)= \; & -c_1(t)\lambda_k\zeta_{k,j}(t-\tau)dt-c_1(t)\zeta_{k,j+1}(t-\tau)dt \\ & -c_1(t)\kappa(t)\bar D_{k,j}\bar X(t-\tau)dt \\ & +dW_{k,j}(t)+d\bar W_{k,j}(t), \;\;j=1,\ldots,n_k-1 \end{split} | (27) |
where
| \begin{split} \zeta_{k,n_k}(t)= \; & \Gamma_k(t,t_0)\zeta_{k,n_k}(t_0) \\ & -\sum_{p=1}^{m}\int_{t_0}^{t} \Gamma_k(t,t_0)c_1(s)\kappa(s)\bar d_p\bar X_p(s)ds \\ & +Z_{k,n_k}(t)+Z_{k,n_k}'(t) \end{split} | (28) |
where
| \begin{split} \mathbb{E}{|\zeta_{k,n_k}(t)|}^2 \le\; & 4\sqrt{b_0}e^{-0.5\varrho_0\int_{t_0}^{t}c_1(u)du} \mathbb{E}{| \zeta_{k,n_k}(t_0)|}^2 \\ & +4\sqrt{b_0}\mathbb{E}\sum_{p=1}^{m}\Bigg(\int_{t_0}^{t} e^{-0.5\varrho(\lambda_k)\int_{s}^{t}c_1(u)du}c_1(s) \\ & \times \kappa(s)|\bar d_p\bar X_p(s)|ds\Bigg)^2 \\ & +C_{k,n_k}\sqrt{b_0}\int_{t_0}^{t} e^{-0.5\varrho_0\int_{s}^{t}c_1(u)du} c_1^2(s)ds \\ & +C_{k,n_k}'\sqrt{b_0} \int_{t_0}^{t} e^{-0.5\varrho_0\int_{s}^{t}c_1(u)du} c_1^2(s)\kappa^2(s)ds \end{split} | (29) |
where
| \begin{split} \lim_{t\to \infty} \mathbb E{\Vert \bar \xi(t) \Vert}^2=0,\;\; \lim_{t\to \infty} {\Vert \bar \xi(t) \Vert}=0. \end{split} | (30) |
Then, we come to the conclusion that MAS (1) can achieve group hybrid coordination behavior with stochastic weak consensus and stochastic containment.
Remark 7: Note that condition (C9) holds if
To investigate this problem, the following condition is needed:
(C10)
Then, we give the following theorem, which is based on the above results.
Theorem 4: For the MAS (1), suppose that Assumptions 1, 2, 5 and 6 hold, and
Proof: We first prove the “if ” parts. From the above analysis, we can get that the agents in subgroup
| \begin{split} \xi'_1(t) = \; &\xi'^*_1 -\int_{0}^{t}c_1(s)\kappa(s)\beta(s)ds \\ & +\upsilon_2^T \sum_{i,j=1}^{n}a_{ij}\sigma_{ji} \vartheta_{n,i}\int_{0}^{t} c_1(s)d\omega_{ji}(s) \\ &+\upsilon_2^T \sum_{i=1}^{n}\sum_{j=n+1}^{n+m}a_{ij}\sigma_{ji}\vartheta_{n,i}\int_{0}^{t}c_1(s)\kappa(s)d\omega_{ji}(s) \end{split} | (31) |
where
| \begin{split} \mathbb E |\xi'_1(t)|^2 \le \; & 4|\xi'^*_1|^2+ 4\mathbb E|\int_{0}^{t}c_1(s)\kappa(s)\beta(s)ds|^2 \\ &+a_1\int_{0}^{t}c_1^2(s)ds+a_2\int_{0}^{t}c_1^2(s)\kappa^2(s)ds \end{split} | (32) |
where
| \begin{equation} \lim_{t\to\infty}{\mathbb{E}|\xi'_1(t)-\xi'^{\infty}_1|}^2=0, \lim_{t\to\infty}\xi'_1(t)=\xi'^{\infty}_1\end{equation} | (33) |
where
Remark 8: From the above analyses, we can see that more conditions are needed to achieve group hybrid coordination control compared to global coordination control. Since different subgroups are required to achieve different coordination behaviors, the system dynamics cannot simply be analyzed as a whole. This results in the existing methods and conditions, such as those in [14], [22], and [24]–[32], unable to solve the group hybrid coordination control problem. Hence, in this paper, we develop a new analysis idea to study this problem. Then, some sufficient conditions and necessary conditions are obtained, and the influence mechanism of the communication impact between the two subgroups is revealed for the group hybrid coordination control problem of MASs with both time-delays and additive noises.
In this section, several simulation examples are presented to illustrate the validity of the protocols and conditions for the group hybrid coordination control problem.
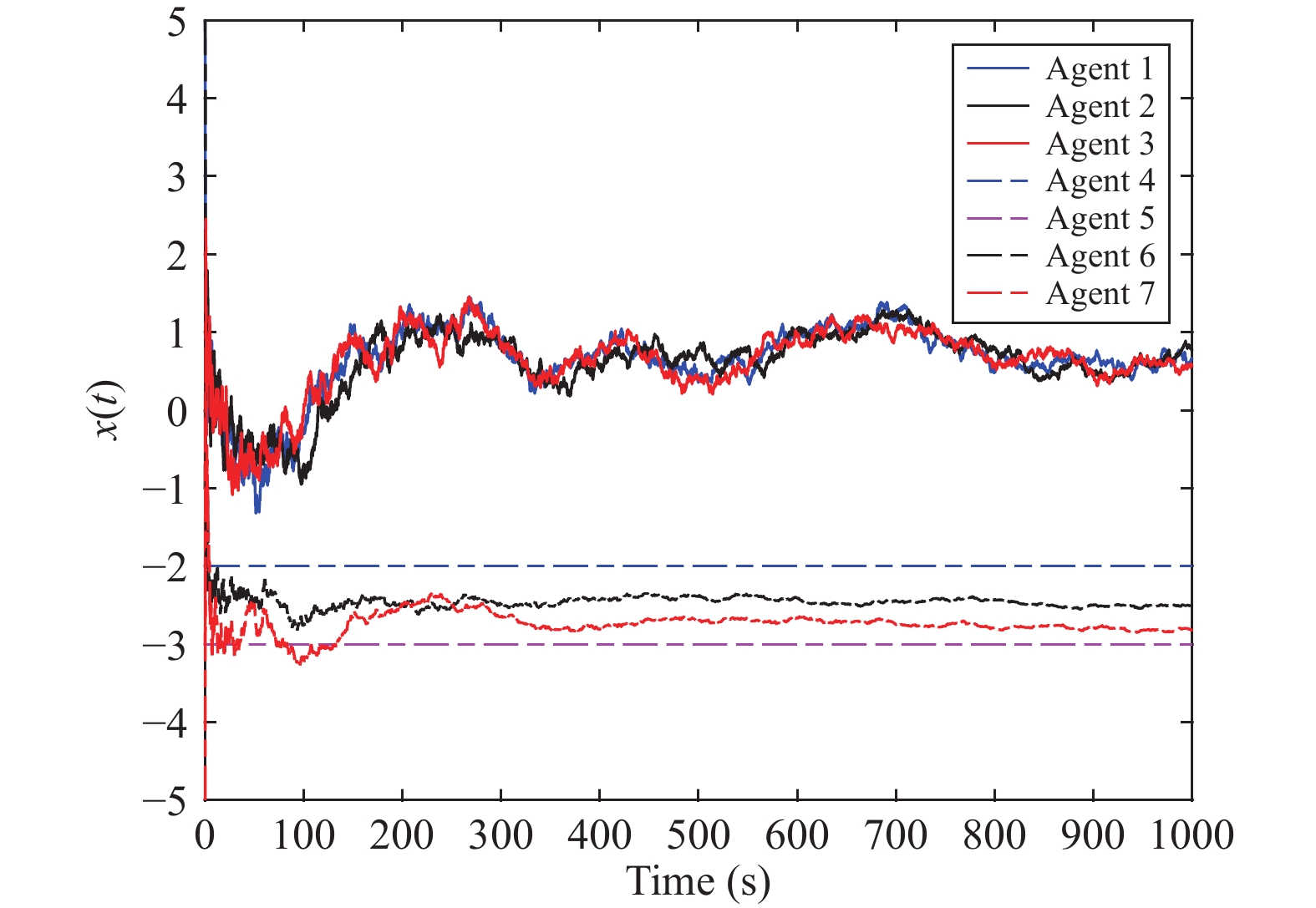
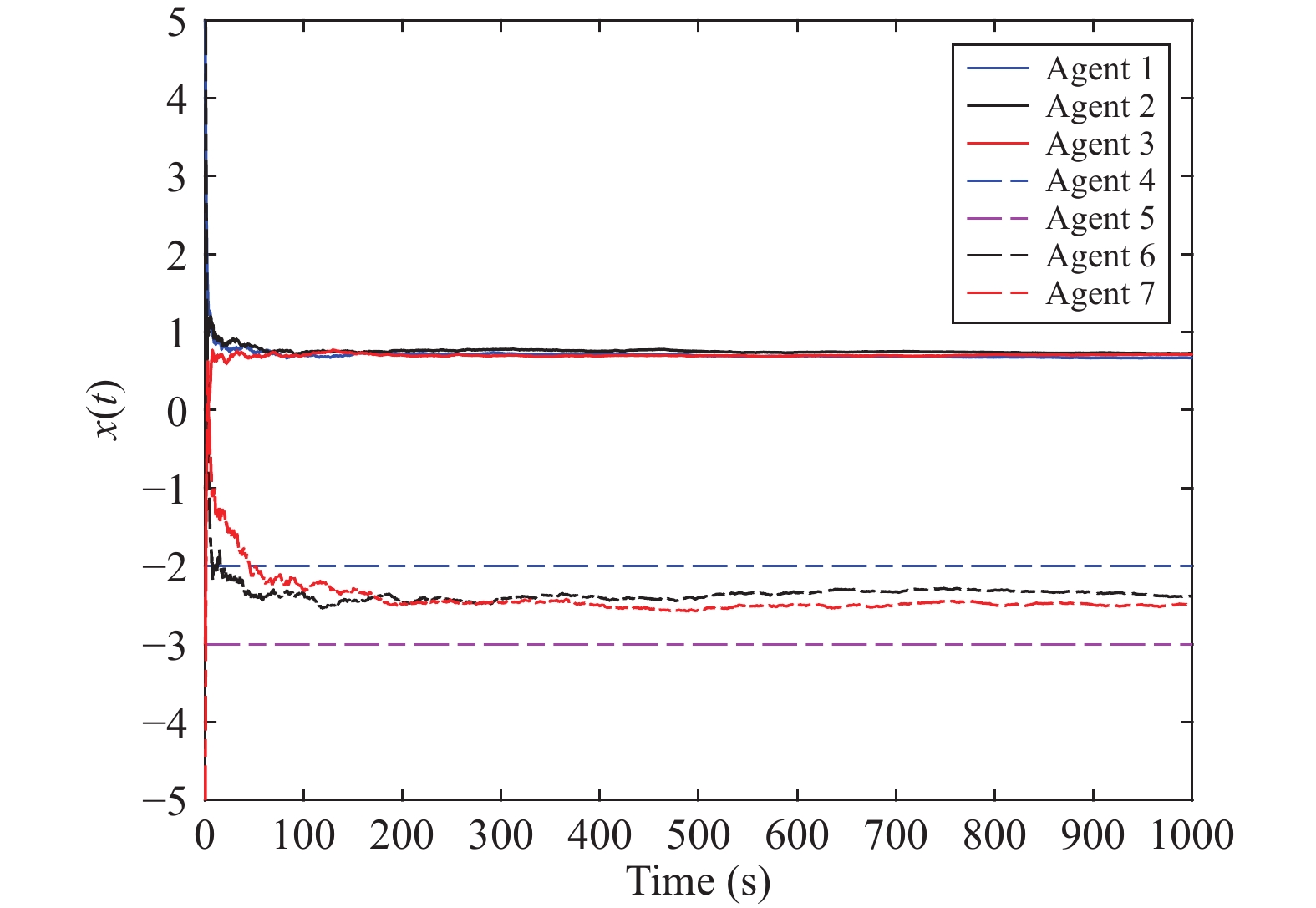
For the containment-oriented case, we give a MAS with seven agents and the communication topology is shown in Fig. 1, where the number of subgroups is 2 and the agents 4 and 5 are two stationary leaders. We can see that Assumption 1 and Assumption 3 hold. Here, we require that agents 1, 2, 3 achieve consensus and agents 4, 5, 6, 7 achieve containment. We give the initial states
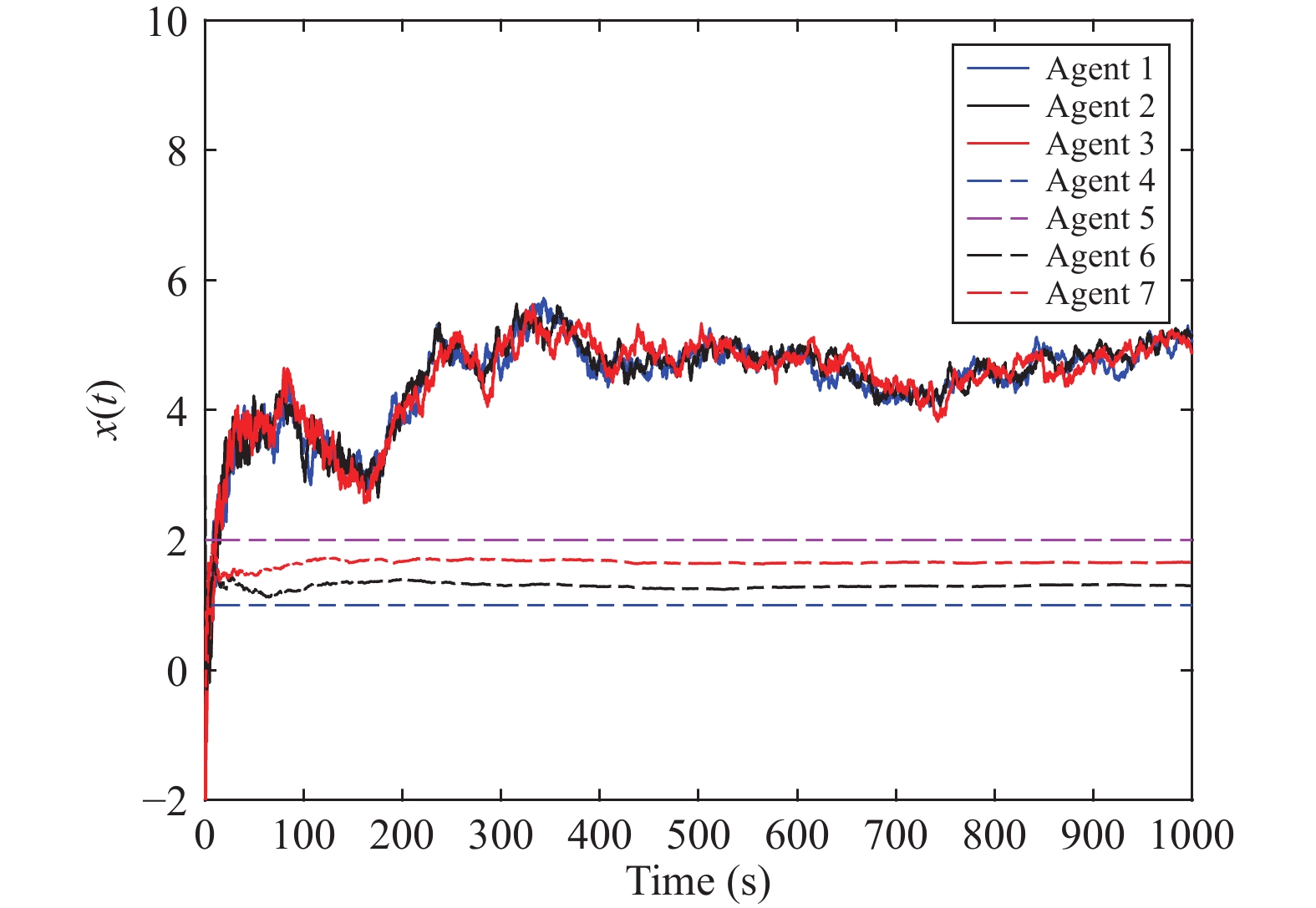
Then, for the consensus-oriented case, we give another MAS with seven agents and the interactions between agents is shown in Fig. 4, where the number of subgroups is 2 and the agents 4 and 5 are also two stationary leaders. We can also see that Assumptions 1 and 5 hold. We also require agents in the two subgroups to achieve the coordination behavior mentioned above. Now, we give

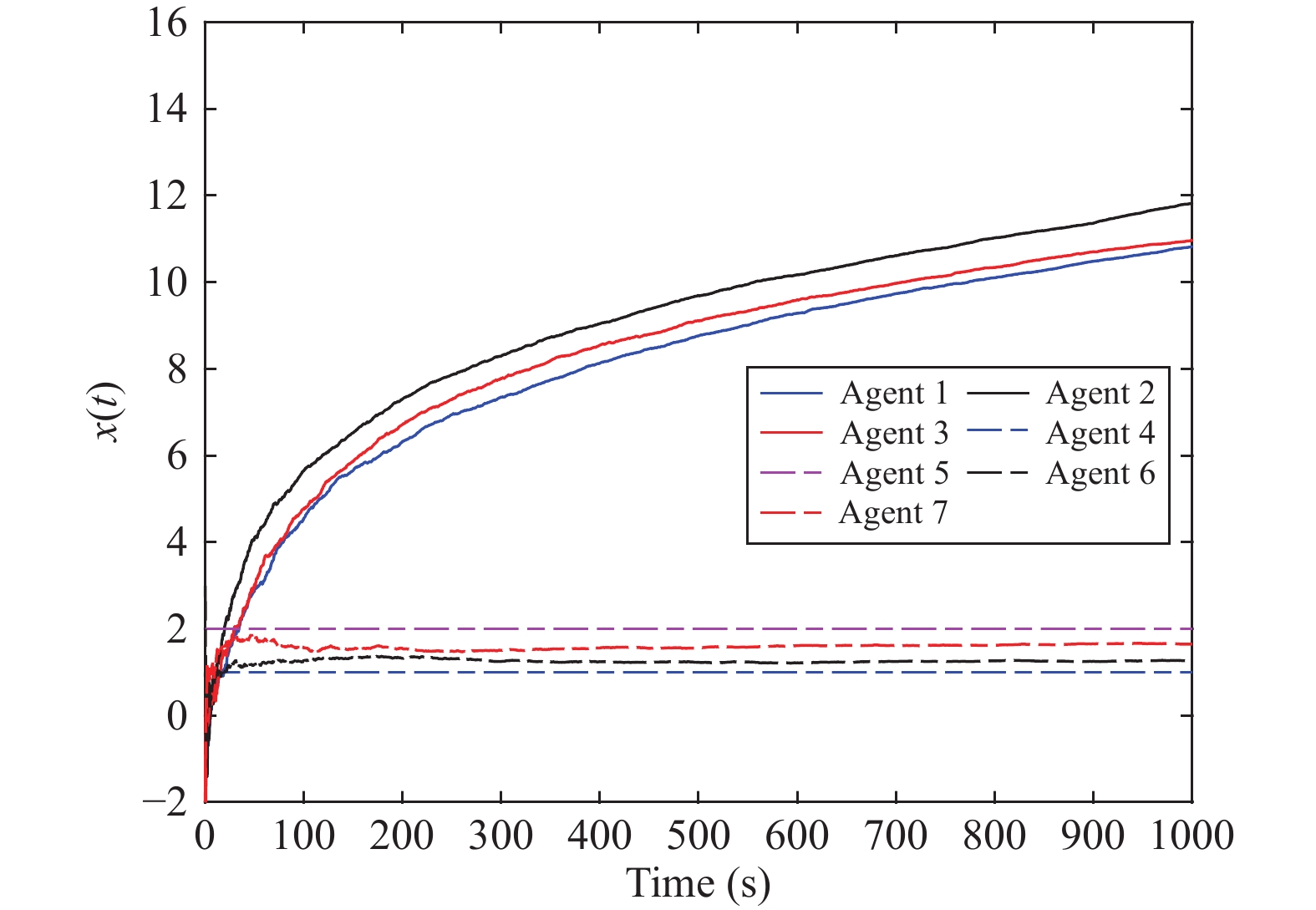
Now, we give a counter-example to show the necessity of the decay of the communication impact between the two subgroups for the consensus-oriented case. We consider
This work addressed the group hybrid coordination control problem of MASs with both time-delays and additive noises. The containment-oriented case and the consensus-oriented case were discussed respectively. Using the semi-decoupled skill and some estimation methods, this work provided a new analysis idea to investigate the group hybrid coordination control problem. Then, some sufficient conditions and necessary conditions were obtained and some interesting phenomenons were found. It is concluded that to solve the group hybrid coordination control problem, more conditions are needed than to solve the global coordination control, and the decaying condition of communication impact between the two subgroups is necessary for the consensus-oriented case. Intuitively, in real networks, the communication impact between the two subgroups may gradually weaken with the increase of the distance between agents in different subgroups. This might be beneficial for designing the group control protocol. Furthermore, the following new findings are obtained: 1) The conditions for the containment-oriented case are weaker than for the consensus-oriented case; 2) For the consensus-oriented case, the conditions for weak consensus are weaker than those for strong consensus.
Recently, many important results on distributed coordination control have been obtained, such as coordination control based on dynamic event-triggered [36] and [37]. Determining how to apply these advanced control strategies to the control problem studied in this paper to improve the system communication efficiency and execution capability is a future direction of investigation.
| [1] |
R. Olfati-Saber and R.M. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1520–1533, 2004. doi: 10.1109/TAC.2004.834113
|
| [2] |
W. Xiao, L. Cao, H. Li, and R. Lu, “Observer-based adaptive consensus control for nonlinear multi-agent systems with time-delay,” Sci. China Inf. Sci., vol. 63, no. 9, p. 132202, 2020.
|
| [3] |
Lin and Y. Jia, “Average consensus in networks of multi-agents with both switching topology and coupling time-delay,” Physica A, vol. 387, pp. 303–313, 2008. doi: 10.1016/j.physa.2007.08.040
|
| [4] |
W. Yu, G. Chen, M. Cao, and W. Ren, “Delay-induced consensus and quasi-consensus in multi-agent dynamical systems,” IEEE Trans. Circuits Syst. I-Regul. Pap., vol. 60, pp. 2679–2687, 2013. doi: 10.1109/TCSI.2013.2244357
|
| [5] |
T. Li and J. Zhang, “Mean square average-consensus under measurement noises and fixed topologies: Necessary and sufficient conditions,” Automatica, vol. 45, pp. 1929–1936, 2009. doi: 10.1016/j.automatica.2009.04.017
|
| [6] |
L. Cheng, Z. Hou, and M. Tan, “A mean square consensus protocol for linear multi-agent systems with communication noises and fixed topologies,” IEEE Trans. Autom. Control, vol. 59, no. 1, pp. 261–267, 2013.
|
| [7] |
B. Wang and J. Zhang, “Consensus conditions of multi-agent systems with unbalanced topology and stochastic disturbances,” J. Sys. Sci. Math. Scis., vol. 29, no. 10, pp. 1353–1365, 2009.
|
| [8] |
Y. Wang, L. Cheng, Z. Hou, M. Tan, H. Liu, and M. Wang, “Necessary and sufficient conditions for solving leader-following problem of multi-agent systems with communication noises,” in Proc. 25th Chinese Control and Decision Conf., 2013, pp. 778–783.
|
| [9] |
Y. Ni and X. Li, “Consensus seeking in multi-agent systems with multiplicative measurement noises,” Syst. Control Lett., vol. 62, no. 5, pp. 430–437, 2013. doi: 10.1016/j.sysconle.2013.01.011
|
| [10] |
Y. Zhang, R. Li and G. Chen, “Consensus control of second-order time-delayed multiagent systems in noisy environments using absolute velocity and relative position measurements,” IEEE T. Cybern., vol. 51, no. 11, pp. 5364–5374, 2021. doi: 10.1109/TCYB.2019.2954623
|
| [11] |
J. Liu, X. Liu, W. Xie, and H. Zhang, “Stochastic consensus seeking with communication delays,” Automatica, vol. 47, pp. 2689–2696, 2011. doi: 10.1016/j.automatica.2011.09.005
|
| [12] |
T. Li and J. Zhang, “Consensus conditions of multi-agent systems with time-varying topologies and stochastic communication noises,” IEEE Trans. Autom. Control, vol. 55, no. 9, pp. 2043–2057, 2010. doi: 10.1109/TAC.2010.2042982
|
| [13] |
S. Liu, L. Xie, and H. Zhang, “Distributed consensus for multi-agent systems with delays and noises in transmission channels,” Automatica, vol. 47, pp. 920–934, 2011. doi: 10.1016/j.automatica.2011.02.003
|
| [14] |
X. Zong, T. Li, and J. Zhang, “Consensus conditions of continuous-time multi-agent systems with time-delays and measurement noises,” Automatica, vol. 99, pp. 412–419, 2019. doi: 10.1016/j.automatica.2018.04.002
|
| [15] |
H. Liu, G. Xie, and L. Wang, “Necessary and sufficient conditions for containment control of networked multi-agent systems,” Automatica, vol. 48, no. 7, pp. 1415–1422, 2012. doi: 10.1016/j.automatica.2012.05.010
|
| [16] |
Z. Peng, J. Hu, and B. Ghosh, “Data-driven containment control of discrete-time multi-agent systems via value iteration,” Sci. China Inf. Sci., vol. 63, no. 8, p. 189205, 2020.
|
| [17] |
Y. Lou and Y. Hong, “Target containment control of multi-agent systems with random switching interconnection topologies,” Automatica, vol. 48, no. 5, pp. 879–885, 2012. doi: 10.1016/j.automatica.2012.02.032
|
| [18] |
F. Wang, Y. Ni, Z. Liu and Z. Chen, “.Containment control for general second-order multiagent systems with switched dynamics,” IEEE T. Cybern., vol. 50, no. 2, pp. 550–560, 2020. doi: 10.1109/TCYB.2018.2869706
|
| [19] |
H. Yang, F. Wang, and F. Han, “Containment control of fractional order multi-agent systems with time delays,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 727–732, 2018. doi: 10.1109/JAS.2016.7510211
|
| [20] |
D. Wang, D. Wang, and W. Wang, “Necessary and sufficient conditions for containment control of multi-agent systems with time delay,” Automatica, vol. 103, pp. 418–423, 2019. doi: 10.1016/j.automatica.2018.12.029
|
| [21] |
K. Liu, G. Xie, and L. Wang, “Containment control for second-order multi-agent systems with time-varying delays,” Syst. Control Lett., vol. 67, pp. 24–31, 2014. doi: 10.1016/j.sysconle.2013.12.013
|
| [22] |
Y. Wang, L. Cheng, Z. Hou, M. Tan, and M. Wang, “Containment control of multi-agent systems in a noisy communication environment,” Automatica, vol. 50, no. 7, pp. 1922–1928, 2014. doi: 10.1016/j.automatica.2014.05.018
|
| [23] |
F. Zhou, Z. Wang, and N. Fan, “Containment consensus with measurement noises and time-varying communication delays,” Chin. Phys. B, vol. 24, no. 2, pp. 23–29, 2015.
|
| [24] |
J. Yu and L. Wang, “Group consensus of multi-agent systems with directed information exchange,” Int. J. Syst. Sci., vol. 43, pp. 334–348, 2012. doi: 10.1080/00207721.2010.496056
|
| [25] |
J. Yu and L. Wang, “Group consensus in multi-agent systems with switching topologies and communication delays,” Syst. Control Lett., vol. 59, pp. 340–348, 2010. doi: 10.1016/j.sysconle.2010.03.009
|
| [26] |
L. Ji, Q. Liu, and X. Liao, “On reaching group consensus for linearly coupled multi-agent networks,” Inf. Sci., vol. 287, pp. 1–12, 2014. doi: 10.1016/j.ins.2014.07.024
|
| [27] |
B. An, G. Liu, and C. Tan, “Group consensus control for networked multi-agent systems with communication delays,” ISA Trans., vol. 76, pp. 78–87, 2018. doi: 10.1016/j.isatra.2018.03.008
|
| [28] |
Y. Shang, “Group consensus of multi-agent systems in directed networks with noises and time delays,” Int. J. Syst. Sci., vol. 46, no. 14, pp. 2481–2492, 2015. doi: 10.1080/00207721.2013.862582
|
| [29] |
M. Song, X. Kong, H. Li, and X. Lu, “Asymptotic consensus and asymptotic group consensus of Boolean networks with additive noise,” in Proc. Int. Conf. Information, Cybernetics, and Computational Social Systems, 2020, pp. 531–536.
|
| [30] |
W. Li, H. Zhang, Y. Zhou, and Y. Wang, “Bipartite formation tracking for multi-agent systems using fully distributed dynamic edge-event-triggered protocol,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 847–853, 2022. doi: 10.1109/JAS.2021.1004377
|
| [31] |
C. Ma, W. Zhao, and Y. Zhao, “Bipartite consensus of discrete-time double-integrator multi-agent systems with measurement noise,” J. Syst. Sci. Complex., vol. 31, no. 6, pp. 1525–1540, 2018. doi: 10.1007/s11424-018-7363-x
|
| [32] |
L. Pan, H. Shao, Y. Xi, and D. Li, “Bipartite consensus problem on matrix-valued weighted directed networks,” Sci. China Inf. Sci., vol. 64, no. 4, p. 149204, 2021.
|
| [33] |
X. Dong, Q. Li, Q. Zhao, and Z. Ren, “Time-varying group formation analysis and design for general linear multi-agent systems with directed topologies,” Int. J. Robust Nonlinear Control, vol. 27, no. 9, pp. 1640–1652, 2017.
|
| [34] |
D. Meng, Z. Meng, and Y. Hong, “Disagreement of hierarchical opinion dynamics with changing antagonisms,” SIAM J. Control Optim., vol. 57, no. 1, pp. 718–742, 2019. doi: 10.1137/17M1130344
|
| [35] |
C. Li and X. Zong, “Group consensus of multi-agent systems with additive noises,” Sci. China Inf. Sci., 2022, DOI: 10.1007/s11432-021-3424-x.
|
| [36] |
X. Ge, S. Xiao, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, 2022. doi: 10.1109/JAS.2021.1004060
|
| [37] |
X. Ge, Q.-L. Han, L. Ding, Y.-L. Wang, X.-M. Zhang, “Dynamic event-triggered distributed coordination control and its applications: A survey of trends and techniques,” IEEE Trans. Syst. Man Cybern. -Syst., vol. 50, no. 9, pp. 3112–3125, 2020. doi: 10.1109/TSMC.2020.3010825
|
| [1] | Meilin Li, Yue Long, Tieshan Li, Hongjing Liang, C. L. Philip Chen. Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 649-660. doi: 10.1109/JAS.2023.123582 |
| [2] | Lihong Feng, Bonan Huang, Jiayue Sun, Qiuye Sun, Xiangpeng Xie. Adaptive Event-Triggered Time-Varying Output Group Formation Containment Control of Heterogeneous Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(6): 1398-1409. doi: 10.1109/JAS.2024.124260 |
| [3] | Hongru Ren, Hui Ma, Hongyi Li, Zhenyou Wang. Adaptive Fixed-Time Control of Nonlinear MASs With Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252-1262. doi: 10.1109/JAS.2023.123558 |
| [4] | Haihua Guo, Min Meng, Gang Feng. Lyapunov-Based Output Containment Control of Heterogeneous Multi-Agent Systems With Markovian Switching Topologies and Distributed Delays[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1421-1433. doi: 10.1109/JAS.2023.123198 |
| [5] | Jingshu Sang, Dazhong Ma, Yu Zhou. Group-Consensus of Hierarchical Containment Control for Linear Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1462-1474. doi: 10.1109/JAS.2023.123528 |
| [6] | Wenchao Huang, Hailin Liu, Jie Huang. Distributed Robust Containment Control of Linear Heterogeneous Multi-Agent Systems: An Output Regulation Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(5): 864-877. doi: 10.1109/JAS.2022.105560 |
| [7] | Yamei Ju, Derui Ding, Xiao He, Qing-Long Han, Guoliang Wei. Consensus Control of Multi-Agent Systems Using Fault-Estimation-in-the-Loop: Dynamic Event-Triggered Case[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(8): 1440-1451. doi: 10.1109/JAS.2021.1004386 |
| [8] | Qinglai Wei, Xin Wang, Xiangnan Zhong, Naiqi Wu. Consensus Control of Leader-Following Multi-Agent Systems in Directed Topology With Heterogeneous Disturbances[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(2): 423-431. doi: 10.1109/JAS.2021.1003838 |
| [9] | Yanxu Su, Qingling Wang, Changyin Sun. Self-triggered Consensus Control for Linear Multi-agent Systems With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 150-157. doi: 10.1109/JAS.2019.1911837 |
| [10] | Ting Wang, Min Hu, Yanlong Zhao. Consensus Control With a Constant Gain for Discrete-time Binary-valued Multi-agent Systems Based on a Projected Empirical Measure Method[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(4): 1052-1059. doi: 10.1109/JAS.2019.1911594 |
| [11] | Long Ma, Haibo Min, Shicheng Wang, Yuan Liu, Zhiguo Liu. Distributed Containment Control of Networked Nonlinear Second-order Systems With Unknown Parameters[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 232-239. doi: 10.1109/JAS.2016.7510235 |
| [12] | Hongyong Yang, Fuyong Wang, Fujun Han. Containment Control of Fractional Order Multi-Agent Systems With Time Delays[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(3): 727-732. doi: 10.1109/JAS.2016.7510211 |
| [13] | Zhenhua Wang, Juanjuan Xu, Huanshui Zhang. Consensus Seeking for Discrete-time Multi-agent Systems with Communication Delay[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 151-157. |
| [14] | Wen Qin, Zhongxin Liu, Zengqiang Chen. Formation Control for Nonlinear Multi-agent Systems with Linear Extended State Observer[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 171-179. |
| [15] | Airong Wei, Xiaoming Hu, Yuzhen Wang. Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 84-91. |
| [16] | Jianming Wei, Yunan Hu, Meimei Sun. Adaptive Iterative Learning Control for a Class of Nonlinear Time-varying Systems with Unknown Delays and Input Dead-zone[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 302-314. |
| [17] | Chuanrui Wang, Xinghu Wang, Haibo Ji. A Continuous Leader-following Consensus Control Strategy for a Class of Uncertain Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 187-192. |
| [18] | Hao Zhang, Gang Feng, Huaicheng Yan, Qijun Chen. Distributed Self-triggered Control for Consensus of Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40-45. |
| [19] | Huiyang Liu, Long Cheng, Min Tan, Zengguang Hou. Containment Control of General Linear Multi-agent Systems with Multiple Dynamic Leaders: a Fast Sliding Mode Based Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 134-140. |
| [20] | Wenhui Liu, Feiqi Deng, Jiarong Liang, Haijun Liu. Distributed Average Consensus in Multi-agent Networks with Limited Bandwidth and Time-delays[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 193-203. |

Figures(7)




C. J. Li and X. F. Zong, “Group hybrid coordination control of multi-agent systems with time-delays and additive noises,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 737–748, Mar. 2023. doi: 10.1109/JAS.2022.105917
 DownLoad:
DownLoad:















 DownLoad:
DownLoad:





