

















































Figure
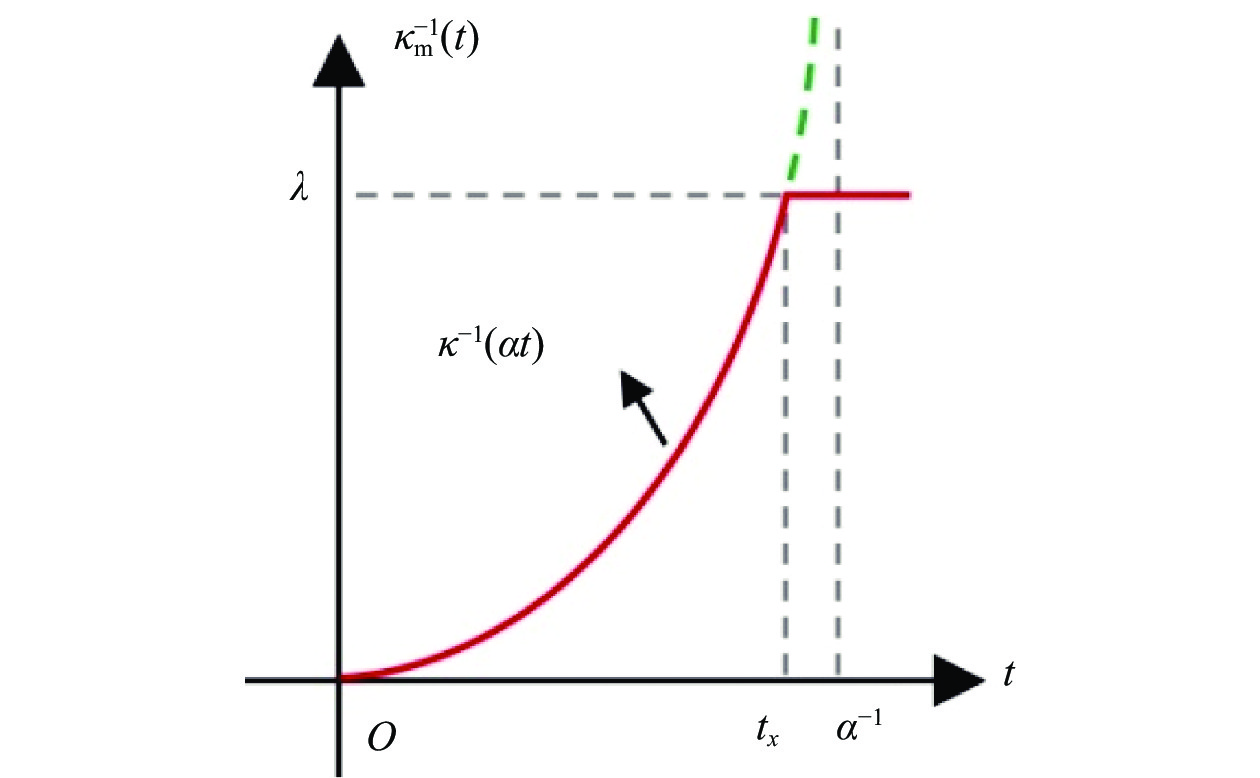
1.
Plot of the function (6).
 Volume 9
Issue 5
Volume 9
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | K. Shao and J. C. Zheng, “Predefined-time sliding mode control with prescribed convergent region,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 934–936, May 2022. doi: 10.1109/JAS.2022.105575

|
Dear editor,
In recent years, the finite-time and fixed-time control techniques have drawn much attention. This letter will present a new method for designing a predefined-time adaptive sliding mode controller with prescribed convergent region. More specifically, class
Related work: Conventional sliding mode control (SMC) requires the disturbance’s upper bound (DUB) a priori, which generally results in undesired overly large control gain. The adaptive gain solves this problem but has other shortcomings. For instance, the earliest reported increasing-type adaptive gain [1] ensures convergence to the origin rather than a region, but it overestimates the disturbance since the gain does not decrease when the disturbance becomes small. Since then, new methods have been studied to moderate this issue but cannot yet arbitrarily define an exact convergent time upper bound irrelevant to the disturbance. For example, in the dead-zone algorithm [2], the sliding variable can be bounded within a region defined by the dead-zone size, but its bound size varies with respect to the disturbance’s amplitude. Similar issue occurs in the leakage-type (LT) adaptive law [3]. More specifically, the convergent bound size under the LT algorithm is a non-zero constant even when the system is not disturbed. In other words, its convergent bound size cannot be arbitrarily small. As pointed out in [4], the barrier function (BF)-based adaptive gain can be automatically adjusted in accordance with the disturbance variation such that overestimation is removed. In addition, the BF-based adaptive gain ensures that the sliding variable is bounded within a predefined constant size regardless of the disturbance amplitude. However, the settling time is related to the initial condition and thus its upper bound of settling time (UBST) can not be arbitrarily determined as well.
Another shortcoming of conventional SMC is that it not only induces extra reaching time that is often associated with the initial condition but also reduces the control robustness because of the absence of sliding mode invariance in the reaching phase. The conventional integral sliding mode (ISM) removes the reaching phase at the cost of guarantee of asymptotic convergence only. Alternatively, terminal sliding mode (TSM) enhances the convergent speed and control precision without removal of reaching phase though. Further, an integral TSM with recursive structure [5] is proposed to provide the advantages of both ISM and TSM. Unfortunately, this method still requires the DUB and may induce singular control signals. After that, the adaptive control [6] and disturbance observer [7] are developed to solve these issues. However, all the existing methods cannot allow the designer to predefine a desired settling time irrespective of the initial condition. The conventional fixed-time SMC can define a constant UBST, but it is not allowed to be arbitrarily small [8], [9]. The predefined-time SMC provides more flexibility allowing the settling time to be arbitrarily small. Nevertheless, in many existing solutions, the UBST value is overestimated and relates to the initial condition [10], [11]. For the non-overestimation predefined-time SMC, the control signal tends to be unbounded if the state or its derivative is not identically equal to zero when the system approaches to the predefined settling time instant [12]. In addition, in both the conventional finite-time and fixed-time SMCs, they still have the reaching phase and require the DUB a priori [13].
This letter aims to provide an SMC scheme that does not require the DUB a priori and guarantees system’s predefined-time stabilization towards a predefined region regardless of the initial condition. It will have the features of removing the reaching phase and allowing arbitrarily small UBST value. To achieve this goal, this letter proposes an adaptive class
Preliminaries: Consider the following autonomous system:
| ˙x=h(x; ρ),x(0)=x0 | (1) |
where
Definition 1 (Fixed-time stable [14]): The system (1) is finite-time stable if the settling-time function of (1),
Definition 2 (Predefined-time stable [14]): The system (1) is predefined-time stable if it is fixed-time stable and for any
| supx0∈RnT(x0)≤Tc. | (2) |
Definition 3 (PTUBPB [15]): A solution
Definition 4 (Class
Property 1: The inverse of
Main results: Consider the following second-order uncertain system:
| ¨x=f(x,˙x)+g(x,˙x)u+ξ | (3) |
where u is control input, x is system state,
First, consider the system (4) and let the sliding functions be
| σ(t)=˙x+κ−1m(t)x | (4) |
| s(t)=σ(t)+z(t) | (5) |
where
| κ−1m(t)=min{κ−1(αt),λ} | (6) |
with
1)
2)
3)
with
Theorem 1: For the sliding functions (5) and (6), if s is bounded within the region of (
Proof: It can be seen that due to the operation of
| ˙x+κ−1m(t)x=s. | (7) |
Define a positive constant
| |x(t)|=e−∫ttfκ−1m(t)dt|x(tf)+∫ttfs(t)e∫ttfκ−1m(t)dtdt|=e−ζ−λ(t−tx)|x(tf)+∫ttfs(t)eζ+λ(t−tx)dt|<|x(tf)|e−λ(t−tx)+ε∫ttfe−λ(t−τ)dτ=|x(tf)|e−λ(t−tx)+ελ(1−e−λ(t−tf)). | (8) |
The above inequality implies that
Next, we propose the following adaptive control input:
| u=−1g(˙κ−1m(t)x+κ−1m(t)˙x+˙z(t)+f + κ−1(ε−1|s|)sgn(s)). | (9) |
Theorem 2: Consider the system (4) under the proposed control (9) with its sliding functions as designed in (5) and (6). Then, the closed-loop system will enter a real sliding mode [2] from the initial time, i.e., the sliding variable satisfying
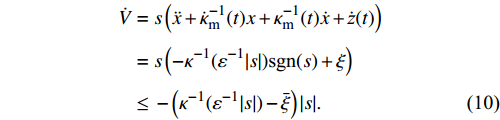
Proof: Defining a Lyapunov function
| ˙V=s(¨x+˙κ−1m(t)x+κ−1m(t)˙x+˙z(t))=s(−κ−1(ε−1|s|)sgn(s)+ξ)≤−(κ−1(ε−1|s|)−ˉξ)|s|. | (10) |
It is clear that
Theorem 3: Consider the system (4) under the proposed control (9) with its sliding functions as designed in (5) and (6). Then, the system state x is PTUBPB. More specific, for any
Theorem 3 can be straightly obtained based on Theorems 1 and 2, and Definition 3; and the proof is thus omitted.
Remark 1: Although the actual settling time
Remark 2: Selecting
| ˙x+κ−1(αt)x=s. | (11) |
Denote
| |x(t)|=e−χ(t)|x(tf)+∫ttfs(t)eχ(t)dt|<|x(tf)|e−χ(t)+ε∫ttfe−χ(t)+χ(τ)dτ<|x(tf)|e−χ(t)+ε/κ−1(αt) | (12) |
for any
Remark 3: To remove the requirement for the DUB, no extra modification is imposed on the adaptive gain
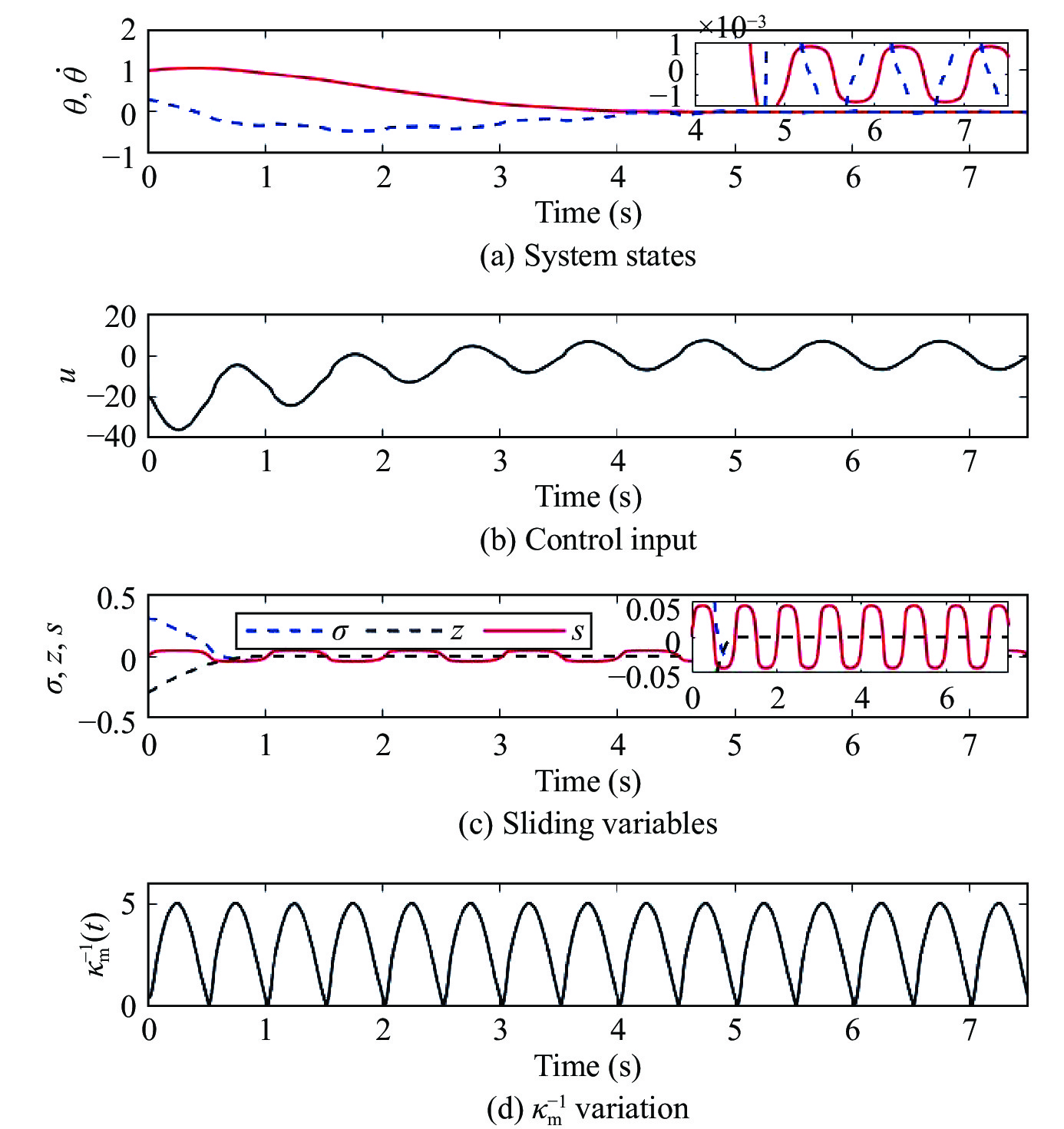
Numerical example: Consider an inverted pendulum system with network-induced time delay as follows:
| ¨θ=gsinθ−mla˙θ2cosθsinθl(43−macos2θ)+acosθl(43−macos2θ)u(t−τ)+d | (13) |
where
Select the class
| z(t)={−σ(0)t2f(t−tf)2,if0≤t<tf0,ift≥tf. | (14) |
The control parameters are chosen as
Conclusions: In this letter, based on the definition of class
| [1] |
Y.-J. Huang, T.-C. Kuo, and S.-H. Chang, “Adaptive sliding-mode control for nonlinear systems with uncertain parameters,” IEEE Trans. Syst. Man Cybern. B,Cybern., vol. 38, no. 2, pp. 534–539, 2008. doi: 10.1109/TSMCB.2007.910740
|
| [2] |
F. Plestan, Y. Shtessel, V. Brégeault, and A. Poznyak, “New methodologies for adaptive sliding mode control,” Int. J. Control, vol. 83, no. 9, pp. 1907–1919, 2010. doi: 10.1080/00207179.2010.501385
|
| [3] |
K. Shao, R. Tang, F. Xu, X. Wang, and J. Zheng, “Adaptive sliding mode control for uncertain Euler-Lagrange systems with input saturation,” J. Franklin Institute, vol. 358, no. 16, pp. 8356–8376, 2021. doi: 10.1016/j.jfranklin.2021.08.027
|
| [4] |
K. Shao, J. Zheng, H. Wang, X. Wang, R. Lu, and Z. Man, “Tracking control of a linear motor positioner based on barrier function adaptive sliding mode,” IEEE Trans. Ind. Informat., vol. 17, no. 11, pp. 7479–7488, 2021. doi: 10.1109/TII.2021.3057832
|
| [5] |
C.-S. Chiu, “Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems,” Automatica, vol. 48, no. 2, pp. 316–326, 2012. doi: 10.1016/j.automatica.2011.08.055
|
| [6] |
K. Shao, “Nested adaptive integral terminal sliding mode control for high-order uncertain nonlinear systems,” Int. J. Robust Nonlinear Control, vol. 31, pp. 6668–6680, 2021. doi: 10.1002/rnc.5631
|
| [7] |
D. Qian, H. Ding, S. G. Lee, and H. Bae, “Suppression of chaotic behaviors in a complex biological system by disturbance observer-based derivative-integral terminal sliding mode,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 126–135, 2020. doi: 10.1109/JAS.2019.1911834
|
| [8] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, 2020. doi: 10.1109/JAS.2020.1003057
|
| [9] |
R. Aldana-López, D. Gómez-Gutiérrez, E. Jiménez-Rodríguez, J. Sánchez-Torres, and M. Defoort, “Enhancing the settling time estimation of a class of fixed-time stable systems,” Int. J. Robust Nonlinear Control, vol. 29, pp. 4135–4148, 2019. doi: 10.1002/rnc.4600
|
| [10] |
C.-D. Liang, M.-F. Ge, Z.-W. Liu, G. Ling, and X.-W. Zhao, “A novel sliding surface design for predefined-time stabilization of Euler-Lagrange systems,” Nonlinear Dynamics, vol. 106, pp. 445–458, 2021. doi: 10.1007/s11071-021-06826-0
|
| [11] |
J. D. Sánchez-Torres, A. J. Munñoz-Vázquez, M. Defoort, E. Jiménez-Rodríguez, and A. G. Loukianov, “A class of predefined-time controllersfor uncertain second-order systems,” European J. Control, vol. 53, pp. 52–58, 2019.
|
| [12] |
Y. Song, Y. Wang, J. Holloway, and M. Krstic, “Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time,” Automatica, vol. 83, pp. 243–251, 2017. doi: 10.1016/j.automatica.2017.06.008
|
| [13] |
P. Krishnamurthy, F. Khorrami, and M. Krstic, “A dynamic high-gain design for prescribed-time regulation of nonlinear systems,” Automatica, vol. 115, no. 108860, 2020. doi: 10.1016/j.automatica.2020.108860
|
| [14] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, 2011.
|
| [15] |
E. Jiménez-Rodríguez, A. J. Muoz-Vázquez, J. D. Sánchez-Torres, M. Defoort, and A. G. Loukianov, “A Lyapunov-like characterization ofpredefined-time stability,” IEEE Trans. Autom. Control, vol. 65, no. 11, pp. 4922–4927, 2020. doi: 10.1109/TAC.2020.2967555
|

Figures(2)




K. Shao and J. C. Zheng, “Predefined-time sliding mode control with prescribed convergent region,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 5, pp. 934–936, May 2022. doi: 10.1109/JAS.2022.105575
 DownLoad:
DownLoad:




















































































 DownLoad:
DownLoad:
