




















































































































Figure
1.
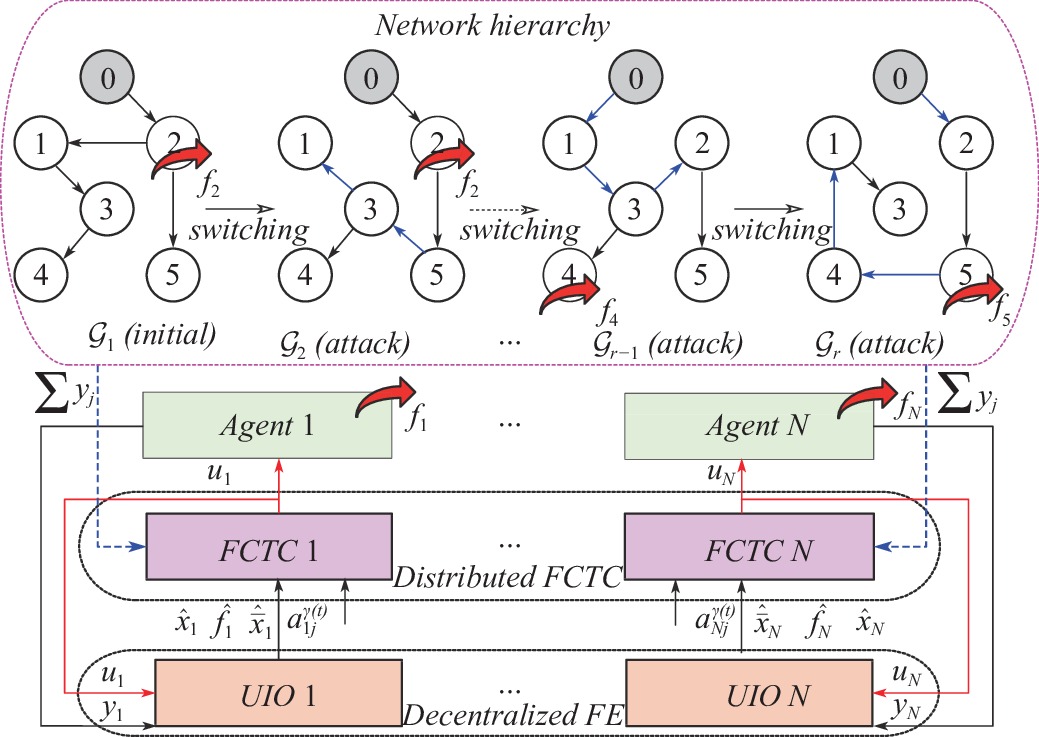
The structure with FE, FCTC, and network hierarchies.
 Volume 9
Issue 6
Volume 9
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | C. Liu, B. Jiang, X. F. Wang, H. L. Yang, and S. R. Xie, “Distributed fault-tolerant consensus tracking of multi-agent systems under cyber-attacks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1037–1048, Jun. 2022. doi: 10.1109/JAS.2022.105419

|
MULTI-AGENT systems (MASs) tracking has been successfully used in many important civil and military applications, such as rigid and flexible spacecrafts, autonomous unmanned aerial vehicles, and mobile robots [1]-[3]. A brief survey of consensus and coordination of MASs was given in [4]. The distributed consensus of the second-order, high-order, homogeneous, and heterogeneous MASs has attracted considerable interest recently [5]-[8]. State-based consensus of homogeneous MASs and output-based consensus of heterogeneous MASs were investigated with event-triggered strategy [7]. Thus, assigning an effective concept of the distributed consensus tracking of MASs is important but challenging.
MASs are vulnerable to network security problems, such as hostile cyber-attacks [9], stealthy attack on remote estimation [10], switching and quantization of nonsmooth behaviors [11], and emergence of sensors on lossy and bandwidth-limited channels [12]. The distributed consensus tracking of MASs requires ideal and accurate information interconnection of individual agents through communication topologies, and the essential issue under cyber-attacks is destroyed. Consensus tracking of MASs under cyber-attacks has been extensively investigated [13]-[16]. The observer-based event-triggered consensus control was developed for discrete-time MASs in the presence of loss sensors and network attacks [14]. Specifically, the secure consensus and coordination of cyber-physical MASs under denial-of-service attacks [17], deception attacks [18] and random attacks [19] were investigated. However, for undirected or directed balanced topologies, the consensus tracking problem of MASs under cyber-attacks cannot be directly addressed via the existing methods based on graph theory. Secure consensus tracking was achieved via switching control strategy for linear MASs with the respective paralyzed and maintained networks caused by cyber-attacks [20]. Therefore, developing a novel consensus tracking control protocol for MASs under cyber-attacks via the switching control concept is necessary but challenging.
The intrinsic state evolution of MASs is affected not only by handover topologies subjected to cyber-attacks but also actuator faults occurring on local agents [21]-[26]. Therefore, MASs need to work safely and healthily, and the fault-tolerant consensus tracking control (FCTC) is an effective method for realizing the desired local tolerance and global synchronization of the entire MASs. Development trends and methodologies of cooperative fault-tolerant control of MASs were briefly summarized in [21]. Partial loss of effectiveness and bias faults of leader-following MASs were addressed by the adaptive robust fault-tolerant control strategy [25], [27]. A distributed observer-based FCTC protocol was developed for linear MASs to achieve the global consensus through local estimations and compensate for multiple heterogeneous actuator faults [28]. However, the majority of studies focus on constant or time-varying abrupt actuator faults [22], [29] and ignore incipient and inchoate actuator faults [30]. Notably, a massive collapse of the entire MASs may be caused by individual agents broadcasting early incipient faults to their neighbors through the communication network and ultimately breaking the synchronization of the MASs. On the one hand, most studies on the FCTC scheme in a distributed manner are either based on neighborhood state information [22], [23], [28] or state-feedback control gains [25]. The FCTC research on the neighboring output information of MASs has been rarely explored. On the other hand, as a result of the existing distributed FCTC methodology, the observer-based strategy is rarely considered from the fault estimation (FE) system to the tolerance system to construct unmeasurable information of each follower [26]. Moreover, the consensus problem of MASs under cyber-attacks has been investigated [31], but few studies focus on the fault-tolerant consensus tracking community, especially for nonlinear MASs in the presence of general incipient and abrupt time-varying actuator faults as well as cyber-attacks. Actuator faults and denial-of-service attacks in the respective linear MASs [32] and nonlinear MASs [33] were simultaneously solved via the distributed fault-tolerant control method with the dwell time technique. The adaptive fault-tolerant control scheme was developed for MASs with deception attacks in the communication layer and actuator faults in the physical layer in a distributed manner [34]. Therefore, developing an observer-based estimation and tolerance algorithm associated with the distributed output measurements for nonlinear MASs with incipient and abrupt actuator faults is crucial for the tolerance problem of MASs under cyber-attacks.
The distributed FCTC is proposed for nonlinear MASs with incipient and abrupt time-varying actuator faults under cyber-attacks. First, the actuator fault and cyber-attack models (connectivity-maintained, connectivity-paralyzed and connectivity-mixed attacks) are established. Second, the unknown input observer (UIO) [26], [29] in decentralized FE is developed to estimate the unmeasurable state and fault information. Finally, two sufficient conditions with attack frequency, activation rate, and average dwelling time (ADT) technique [17], [20], [33] are given to achieve the exponential consensus tracking of leader-following MASs.
The major contributions of this study are summarized as follows. 1) In comparison with the cooperative consensus of MASs under independent cyber-attacks [13], [31] or the FCTC of MASs under traditional abrupt bounded faults [28], [29], this study attempts to combine network anti-attack and fault-tolerant control technologies effectively. By virtue of the switching topology theory [7], [20], it is a brand-new attempt to address the different types of constraints of self-dynamics (general incipient and abrupt time-varying actuator faults) in physical hierarchy and maintained/paralyzed links (connectivity-mixed attacks) in networked hierarchy in an integrated FE-based distributed FCTC framework. 2) Unlike local state information [22], [23] and direct state-feedback protocols [25], [33] of neighboring agents, a novel control structure is proposed with the effective combination advantages of local fault/state estimation in the decentralized UIO-based FE and adjacent output information in the distributed FCTC to ensure the exponential consensus tracking of nonlinear leader-following MASs. 3) For connectivity-maintained attacks, dual metrics (attack frequency and attack duration) in [17] are circumvented and replaced by a single constrained metric (ADT) to realize secure consensus tracking with less computing resources. For connectivity-mixed attacks, the ADT switching between stable and unstable sub-topologies [20], [33] is evaded and replaced by multi-constraint metrics (attack frequency, activation rate and upper and lower bounds of FCTC parameters) to deal with faults and cyber-attacks simultaneously.
The remainder of this study is structured as follows. Preliminaries and problem formulation are presented in Section II. The decentralized FE and distributed FCTC designs for leader-following MASs under cyber-attacks are discussed in Sections III and IV, respectively. Simulations are provided in Sec-tion V to illustrate the effectiveness of the FCTC strategy. Finally, conclusions of this study are drawn in Section VI.
Notations:
A directed graph
The diagonal matrix is denoted by
A class of nonlinear MASs with a group of
| {˙xi(t)=Axi(t)+B(ui(t)+fi(t))+ξ(xi(t),t)yi(t)=Cxi(t) | (1) |
where
| fis(t)={0,t≤Ts(1−e−ϵs(t−Ts))ˉfis,t>Ts,s=1,…,m | (2) |
where
The leader’s dynamics (labeled as
| {˙x0(t)=Ax0(t)+Bu0(t)+ξ(x0(t),t)y0(t)=Cx0(t) | (3) |
where
Assumption 1: The dynamics
Assumption 2: i) The incipient and abrupt actuator faults are differentiable after each fault occurrence instant. ii) The lower and upper bounds of incipient actuator fault are determined manually with the known positive scalars
Assumption 3: The nonlinear function
| ‖ξ(ω1(t),t)−ξ(ω2(t),t)‖≤ρ‖ω1(t)−ω2(t)‖ | (4) |
where
Definition 1 [35]: The exponential consensus tracking control problem of the leader-following MASs in (1) and (3) is solved if
| ‖ei(t)‖2≤μe−λ(t−t0)‖ei(t0)‖2 | (5) |
where
A switching signal
The following kinds of cyber-attacks are defined:
1) Connectivity-Maintained Attacks: The connectivity-maintained topology (removing or adding edges) still remains connected and contains a directed spanning tree with the leader as the root although MASs suffer from actuator faults. The switching signal is denoted by
2) Connectivity-Paralyzed Attacks: The topology under connectivity-paralyzed attacks (removing or adding edges remarkably) becomes disconnected without a directed spanning tree but can be recovered into connectivity with the repair mechanism although actuator faults exist. The switching signal is denoted by
3) Connectivity-Mixed Attacks: The switching signal
Definition 2 [20]: Denote the time instants
Define the total activation durations of connectivity-maintained and connectivity-paralyzed attacks over
| {Tm(t0,t)=∑k∈N,γ(tk)∈Γm(tk+1−tk)Tp(t0,t)=∑k∈N,γ(tk)∈Γp(tk+1−tk). | (6) |
Furthermore, if two scalars
Definition 3 (Connectivity-Paralyzed Attack Frequency): For
Definition 4 (Connectivity-Maintained Attack Activation Rate): For
Definition 5 (Connectivity-Paralyzed Attack Activation Rate): For
Lemma 1 [36]:
Remark 1: Communication topologies may be subjected to frequent connectivity-maintained/-paralyzed attacks and eventually lead to poor consensus with destroyed links among agents. Compared with the arbitrary switching [5] or switching networks that satisfy jointly connected condition [7], connectivity-maintained attacks with a directed spanning tree and connectivity-paralyzed attacks without a spanning tree are modeled. It is required that the switching characteristics of dynamic switching topologies
Remark 2: Compared with the linear state-dependent nonlinear dynamics [24] and quadratic nonlinear constraints [26], the modeled nonlinear perturbation
A UIO-based FE scheme is developed for MASs to obtain the fault and state estimated information with decentralized structure in this section.
The augmented state is denoted as
| {˙ˉxi(t)=ˉAˉxi(t)+ˉBui(t)+ˉDˉdi(t)+ˉξ(A0ˉxi(t))yi(t)=ˉCˉxi(t) | (7) |
where
| ˉA=[AB0m×n0m],ˉB=[B0m],ˉD=[0n×mIm]. | (8) |
Decentralized observers only need the output and input information of each agent, but do not require the information of their neighboring observers. Then, each augmented state
| {˙zi(t)=Mzi(t)+Gui(t)+Jyi(t)+Θˉξ(A0ˆˉxi(t))ˆˉxi(t)=zi(t)+Hyi(t) | (9) |
where
The estimation error is denoted as
| ˙˜ei(t)=(ΘˉA−J1ˉC)˜ei(t)+(ΘˉA−J1ˉC−M)zi(t)+((ΘˉA−J1ˉC)H−J2)yi(t)+(ΘˉB−G)ui(t)+Θ(ˉξ(A0ˉxi(t))−ˉξ(A0ˆˉxi(t)))+ΘˉDˉdi(t). | (10) |
Subsequently, with the following equality constraints of
| {M=ΘˉA−J1ˉCJ2=(ΘˉA−J1ˉC)HG=ΘˉB | (11) |
where M is a Hurwitz matrix, and the corresponding FE error dynamics are expressed as
| ˙˜ei(t)=M˜ei(t)+ΘˉDˉdi(t)+ΘΔˉξi(t) | (12) |
where
It then follows that:
| ˙˜e(t)=(IN⊗M)˜e(t)+(IN⊗ΘˉD)ˉd(t)+(IN⊗Θ)Δˉξ(t) | (13) |
where
Hence, the objective of decentralized FE design aims at devising H and
Remark 3: The
The distributed fault-tolerant consensus tracking controller of the
| ui(t)=−Kˆˉxi(t)+δRΞi(yj(t),γ(t)),i=1,…,N | (14) |
where
| Ξi(yj(t),γ(t))=N∑j=1aγ(t)ij(yj(t)−yi(t))+bγ(t)i(y0(t)−yi(t)) | (15) |
where
The state tracking error dynamics can be rewritten as
| ˙ei(t)=(A−BKx)ei(t)+BK˜ei(t)+Δ˜ξi(t)+δBRC(N∑j=1aγ(t)ij(ej(t)−ei(t))−bγ(t)iei(t)) | (16) |
where
Furthermore, it follows that:
| ˙e(t)=(IN⊗(A−BKx)−δ(Hγ(t)⊗BRC))e(t)+(IN⊗BK)˜e(t)+Δ˜ξ(t) | (17) |
where the global vectors
The objective of Case I with proposing the distributed FCTC protocol in (14) and (15) is to determine
Theorem 1: Consider leader-following MASs with incipient and abrupt actuator faults in (2) under connectivity-maintained attacks. Given positive scalars
| He((A−BKx)P)+(λ1ˉϕ−cϕ_)BBT+ˉϕ(λ1In+ρ2P2)+τ3P<0 | (18) |
| 1τ1(M+MT+ΘˉDˉDTΘT+ΘΘT+ρ2AT0A0)+KTK+τ4In+m<0 | (19) |
| τ4<2ϵ_incτ1 | (20) |
| τ2≤−τ21τ4+2τ1ϵ_inc | (21) |
where
The constant matrix is denoted by
| TΓm>ln(ˉϕϕ_)τm | (22) |
where
| E{‖ei(t)‖2}≤μΓme−λΓm(t−t0)E{‖ei(t0)‖2} | (23) |
with the initial maximum amplitude given by
| μΓm=eˉNΓmln(ˉϕϕ_)(λmax(ϕ−1γ(t),iP−1)+σΓm)λmin(ϕ−1γ(t),iP−1) | (24) |
and the decay rate
| λΓm=τm−ln(ˉϕϕ_)TΓm. | (25) |
Proof: Construct a Lyapunov function candidate
| V1(e(t),γ(t))=N∑i=1eTi(t)ϕ−1γ(t),iP−1ei(t) | (26) |
where
Denote
| ˙V1(e(t),γ(t))=2N∑i=1eTi(t)ϕ−1γ(t),iP−1BK˜ei(t)+ςT(t)(Φγ(t)⊗((A−BKx)P+P(A−BKx)T))ς(t)−δςT(t)((Φγ(t)Hγ(t)+HTγ(t)Φγ(t))⊗BBT)ς(t)+ςT(t)(Φ2γ(t)⊗In)ς(t)+N∑i=1Δ˜ξTi(t)Δ˜ξi(t)≤ςT(t)(Φγ(t)⊗((A−BKx)P+P(A−BKx)T+(λ1ˉϕ−cϕ_)BBT+ˉϕ(λ1In+ρ2P2)))ς(t)+˜eT(t)(IN⊗KTK)˜e(t) | (27) |
where the bounds
Here, incipient and abrupt actuator faults are considered. The first-order derivative form is obtained with
| ˙ˉdi(t)=¨fi(t)=−diag(ϵ1,…,ϵm)ˉdi(t) | (28) |
where
Subsequently, another Lyapunov function candidate
| ˙V2(˜e(t),ˉd(t))≤1τ1N∑i=1˜eTi(t)(M+MT+ΘˉDˉDTΘT+ΘΘT+ρ2AT0A0)˜ei(t)+N∑i=1(1τ1−2minϵsτ2)ˉdTi(t)ˉdi(t) | (29) |
where
Finally, consider the Lyapunov function
| ˙V(e(t),˜e(t))<−τ3ςT(t)(Φγ(t)⊗P)ς(t)−τ4˜eT(t)˜e(t)+N∑i=1(1τ1−2τ2ϵ_inc)ˉdTi(t)ˉdi(t)=−τ3V1(e(t),γ(t))−τ1τ4V2(˜e(t),ˉd(t))+(τ1τ4τ2+1τ1−2τ2ϵ_inc)N∑i=1ˉdTi(t)ˉdi(t). | (30) |
According to
Integrating both sides of (30) over
| V(e(t),˜e(t))≤e−τm(t−tk)V(e(tk),˜e(tk)). | (31) |
It follows that
In Definition 2,
| V(e(t),˜e(t))≤ˉϕϕ_e−τm(t−tk)V(e(t−k),˜e(t−k))≤ˉϕϕ_e−τm(t−tk−1)V(e(tk−1),˜e(tk−1))≤⋯≤(ˉϕϕ_)ke−τm(t−t0)V(e(t0),˜e(t0))≤eˉNΓmln(ˉϕϕ_)e−(τm−ln(ˉϕϕ_)TΓm)(t−t0)V(e(t0),˜e(t0)). | (32) |
Next, with the definition of
| V(e(t),˜e(t))}≥λmin(ϕ−1γ(t),iP−1)‖ei(t)‖2 | (33) |
and the expression with the initial time
| V(e(t0),˜e(t0))≤(λmax(ϕ−1γ(t),iP−1)+maxi=1,…,N(1τ1‖˜ei(t0)‖2+1τ2‖ˉdi(t0)‖2)mini=1,…,N‖ei(t0)‖2)‖ei(t0)‖2. | (34) |
Denoting
| ‖ei(t)‖2≤μΓme−λΓm(t−t0)‖ei(t0)‖2 | (35) |
with
| μΓm=eˉNΓmln(ˉϕϕ_)ΛΓmλmin(ϕ−1γ(t),iP−1),λΓm=τm−ln(ˉϕϕ_)TΓm. | (36) |
Hence, both
Remark 4: In the presence of complicated actuator faults and connectivity-maintained attacks, it is difficult for the existing fault-tolerant methods [22], [25], [26] to guarantee the consensus tracking property of MASs, especially with the coupling characteristics between the estimation and tolerance systems. Thus, a decentralized UIO in (9) is developed to estimate the relative states/actuator faults, and the estimated information is then applied to the novel distributed FCTC protocol in (14) to compensate for Lipschitz nonlinearity, actuator faults, and connectivity-maintained attacks and subsequently achieve the overall consensus tracking. Unlike the decentralized adaptive fault-tolerant tracking control via local estimations [28], these FCTC methods, which depend on the offset item
The objective of Case II with designing the fully distributed FCTC protocol in (14) and (15) is to determine
Theorem 2: Consider leader-following MASs with incipient and abrupt actuator faults in (2) under connectivity-mixed attacks. Given positive scalars
| He((A−BKx)P)+(1+˜c)BBT+In+ρ2P2−˜τ3P<0 | (37) |
| 1τ1(M+MT+ΘˉDˉDTΘT+ΘΘT+ρ2AT0A0)+KTK−˜τ4In+m<0 | (38) |
| τ2≤τ21˜τ4+2τ1ϵ_inc | (39) |
and the positive scalar
| c|λ2|≤δ≤˜c|λ3| | (40) |
and for a positive decay rate
| FΓp(t0,t)≤λ∗Γ−λΓ2ln(ˉϕϕ_) | (41) |
and for a scalar
| RΓm(t0,t)≥τp+λ∗Γτm+τp,RΓp(t0,t)≤τm−λ∗Γτm+τp | (42) |
where
Thus, the consensus tracking performance is exponentially achieved with the state tracking error expectation
| E{‖ei(t)‖2}≤μΓe−λΓ(t−t0)E{‖ei(t0)‖2} | (43) |
with the initial maximum amplitude given by
| μΓ=max{λmax(ϕ−1γ(t),iP−1),λmax(P−1)}+σΓmin{λmin(ϕ−1γ(t),iP−1),λmin(P−1)}. | (44) |
Proof: Construct the Lyapunov function candidate
| ˜V1(e(t),γ(t))={eT(t)(Φγ(t)⊗P−1)e(t),γ(t)∈ΓmeT(t)(IN⊗P−1)e(t),γ(t)∈Γp. | (45) |
Then, the Lyapunov function candidate
When the MASs suffer from
| ˙˜V1(e(t),γ(t))=ςT(t)(IN⊗He((A−BKx)P)−δHe(Hγ(t))⊗BBT)ς(t)+2ςT(t)(IN⊗BK)˜e(t)+2ςT(t)Δ˜ξ(t)≤ςT(t)(IN⊗(He((A−BKx)P)+(1+˜c)BBT+In+ρ2P2))ς(t)+˜eT(t)(IN⊗KTK)˜e(t) | (46) |
where
According to the constraints in (37)–(39), i.e.,
Integrating both sides of
| ˜V(t)≤{e−τm(t−tk)˜V(e(tk),˜e(tk)),γ(t)∈Γmeτp(t−tk)˜V(e(tk),˜e(tk)),γ(t)∈Γp. | (47) |
It follows that
| ˜V(e(t),˜e(t))≤⋯≤(ˉϕϕ_)keτpTp(t0,t)−τmTm(t0,t)˜V(e(t0),˜e(t0))≤e2NΓp(t0,t)ln(ˉϕϕ_)+τpTp(t0,t)−τmTm(t0,t)˜V(e(t0),˜e(t0)). | (48) |
On the basis of the inequality constraint in (41) of the connectivity-paralyzed attack frequency
Thus, when the connectivity-mixed attacks are considered, i.e.,
| ˜V(e(t),˜e(t))≤e−λΓ(t−t0)˜V(e(t0),˜e(t0)) | (49) |
and the state tracking error is given as
| ‖ei(t)‖2≤˜V(e(t),˜e(t))min{λmin(ϕ−1γ(t),iP−1),λmin(P−1)}≤μΓe−λΓ(t−t0)‖ei(t0)‖2 | (50) |
with the chosen positive scalar
Hence, the state tracking error expectation in (50) indicates that the consensus tracking performance under connectivity-mixed attacks
Remark 5: Compared with the distributed FCTC algorithm with ADT technique in Theorem 1, the success of connectivity-maintained and connectivity-paralyzed activation ratio of connectivity-mixed attacks is considered to ensure the tolerance and represent the connectivity and paralyzation of attacks passing through protection or repair devices subject to network fluctuations and limited resources. Unlike the fixed graph [7], [23], the preset switching graph is more general and more extensively applied in addressing network interruption [33]. The proposed distributed FCTC algorithm can be combined with the switching mechanism [20] to ensure that each agent can still realize the consensus tracking of MASs with connectivity-mixed attacks provided that attack frequency and activation rates in Theorem 2 satisfy certain conditions in (41) and (42). Furthermore, compared with existing studies on the FCTC design related to the state measurement error [17], the captured output information is added on the basis of the selected parameters in (40) to avoid high-precision measuring device.
In this section, a network of five single-link manipulators with revolute joints is put forward to verify the effectiveness of the proposed distributed FCTC design under cyber-attacks.
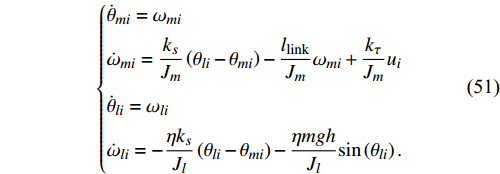
The model of the single-link manipulator with a flexible joint actuated by DC motor is given with the following state vector
| {˙θmi=ωmi˙ωmi=ksJm(θli−θmi)−llinkJmωmi+kτJmui˙θli=ωli˙ωli=−ηksJl(θli−θmi)−ηmghJlsin(θli). | (51) |
The physical meanings and values of the parameters in the single-link manipulator are illustrated in Table I. Furthermore, the state-dependent nonlinear perturbation
| Parameter | Physical meaning | Value/Unit |
| $ J_m $ | Inertia of the motor | $0.0037\;{\rm kg.m^2}$ |
| $ J_l $ | Inertia of the link | $0.0093\;{\rm kg.m^2}$ |
| $ k_s $ | Torsional spring constant | $0.18\;{\rm Nm/rad}$ |
| $ k_{\tau} $ | Amplifier gain | $0.08\;{\rm Nm/V}$ |
| $ \eta $ | Transformation coefficient | $ 0.1 $ |
| $l_{\rm{link} }$ | Length of the link | $0.31\;{\rm m}$ |
| $ h $ | Center of gravity height | $0.015\;{\rm m}$ |
| $ m $ | Point mass of the arm | $0.139\;{\rm kg}$ |
| $ g $ | Gravity constant | $9.8\;{\rm m/s^2}$ |
 DownLoad:
CSV
DownLoad:
CSV
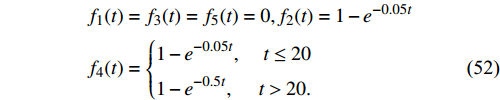
To demonstrate the efficiency of the proposed algorithms in Theorems 1 and 2, the incipient and abrupt time-varying actuator faults
| f1(t)=f3(t)=f5(t)=0,f2(t)=1−e−0.05tf4(t)={1−e−0.05t,t≤201−e−0.5t,t>20. | (52) |
Simulation parameters are set as
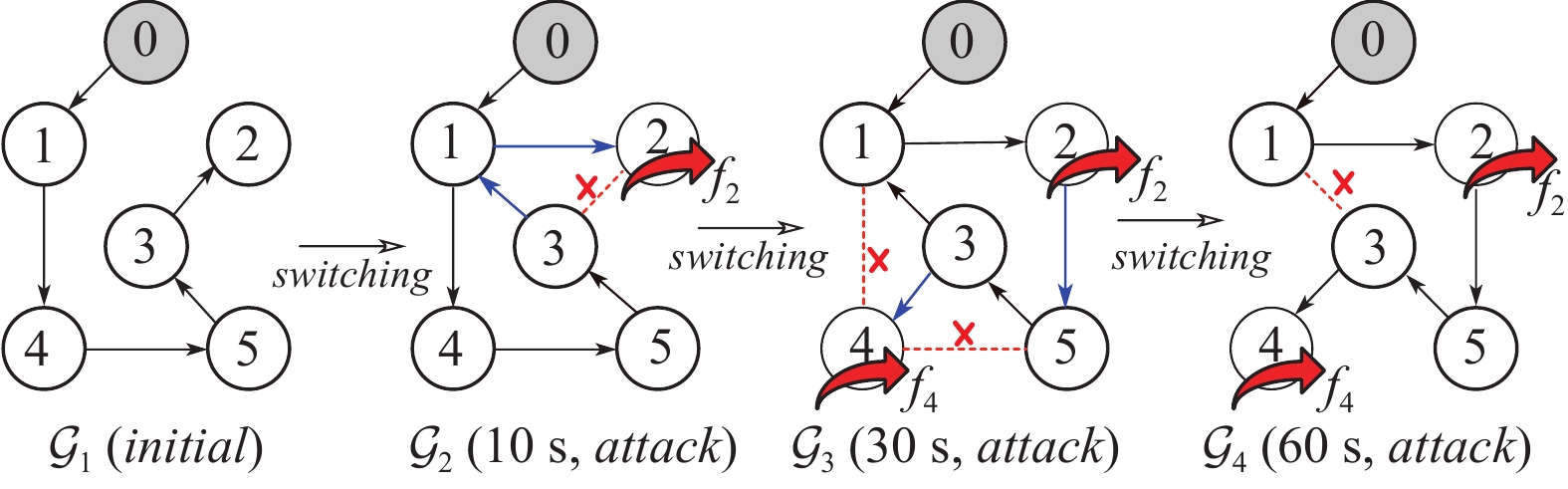
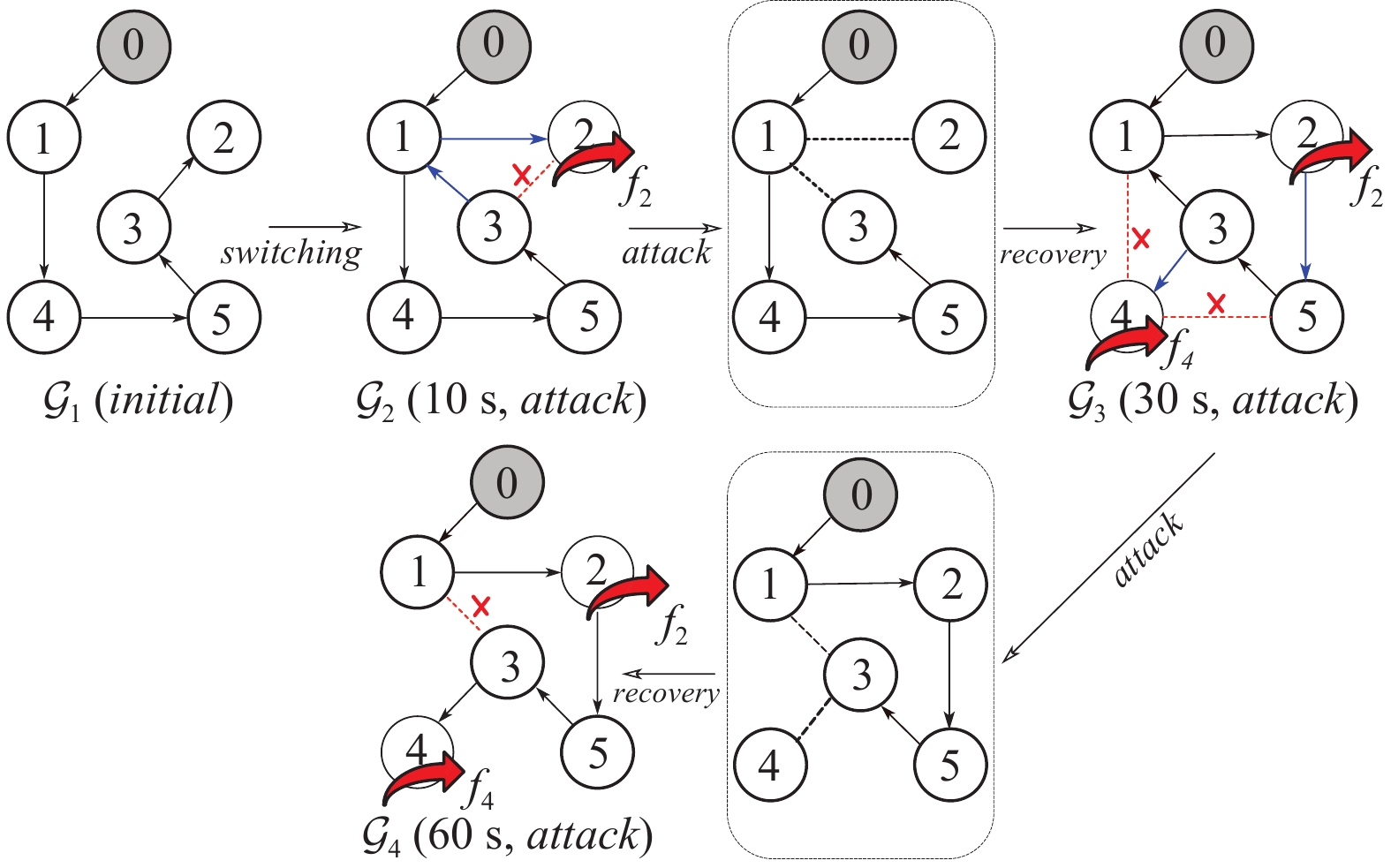
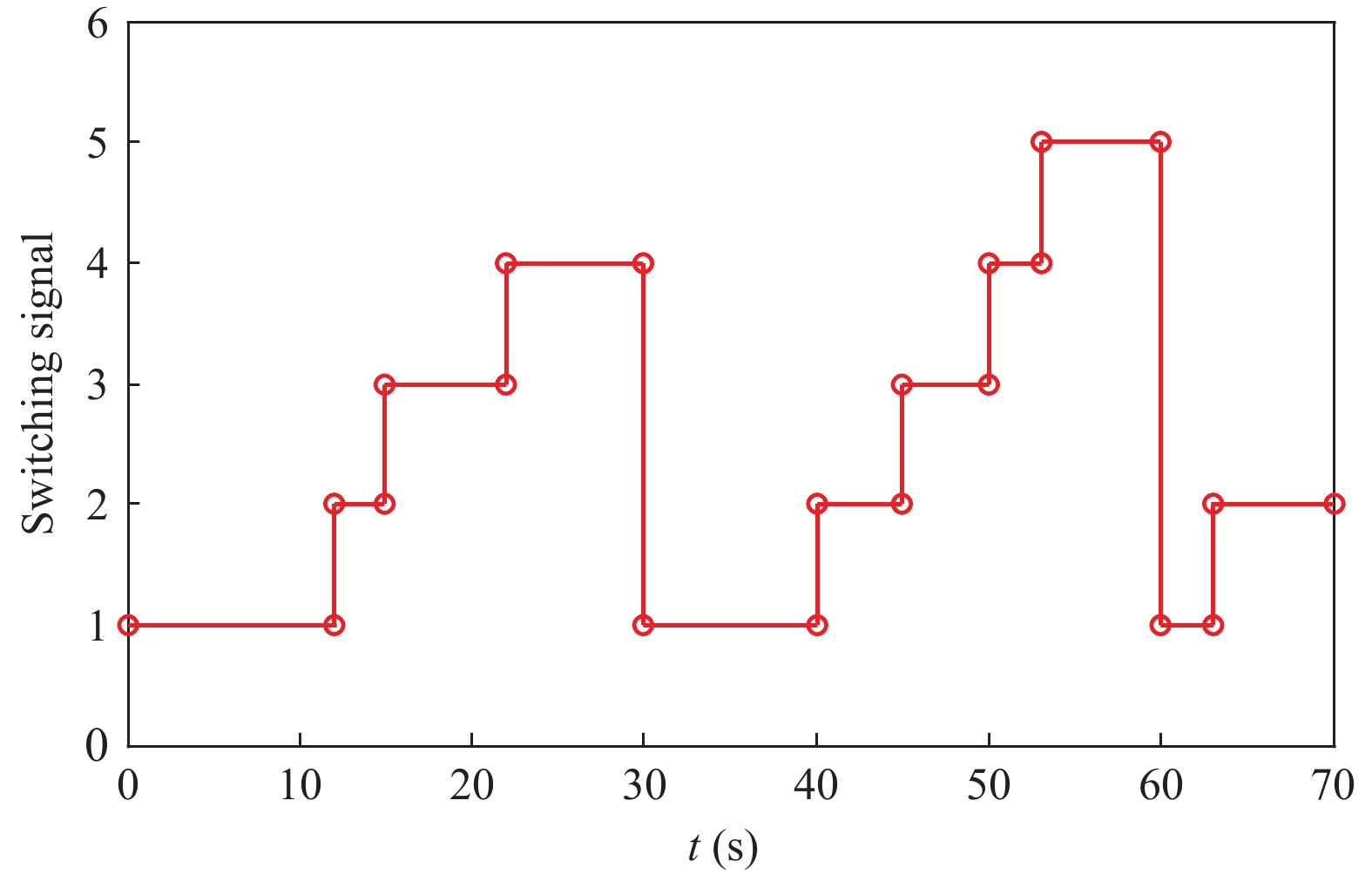
The switching topologies under connectivity-maintained attacks are shown in Fig. 2 and the switching topologies under connectivity-mixed attacks are shown in Fig. 3, in which the second single-link manipulator fails with the incipient actuator fault and the fourth manipulator suffers from the combined incipient and abrupt faults at each fault occurrence time, i.e.,
In the presence of the incipient and abrupt actuator faults, the results in Figs. 5-8 under connectivity-maintained attacks (Case I) and in Figs. 9-12 under connectivity-mixed attacks (Case II) validate the effectiveness of the proposed distributed FCTC algorithms in Theorems 1 and 2. The respective angular rotation tracking
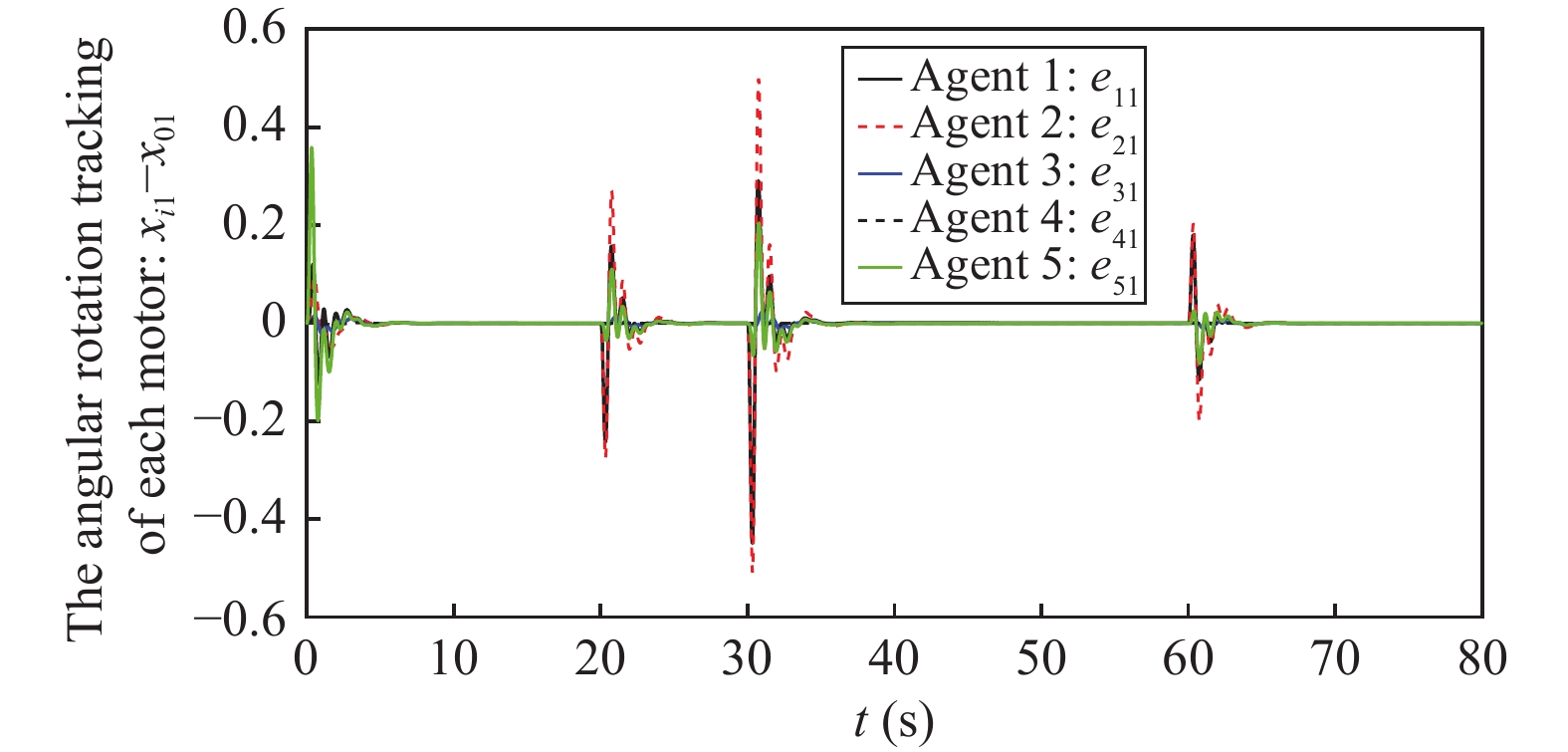
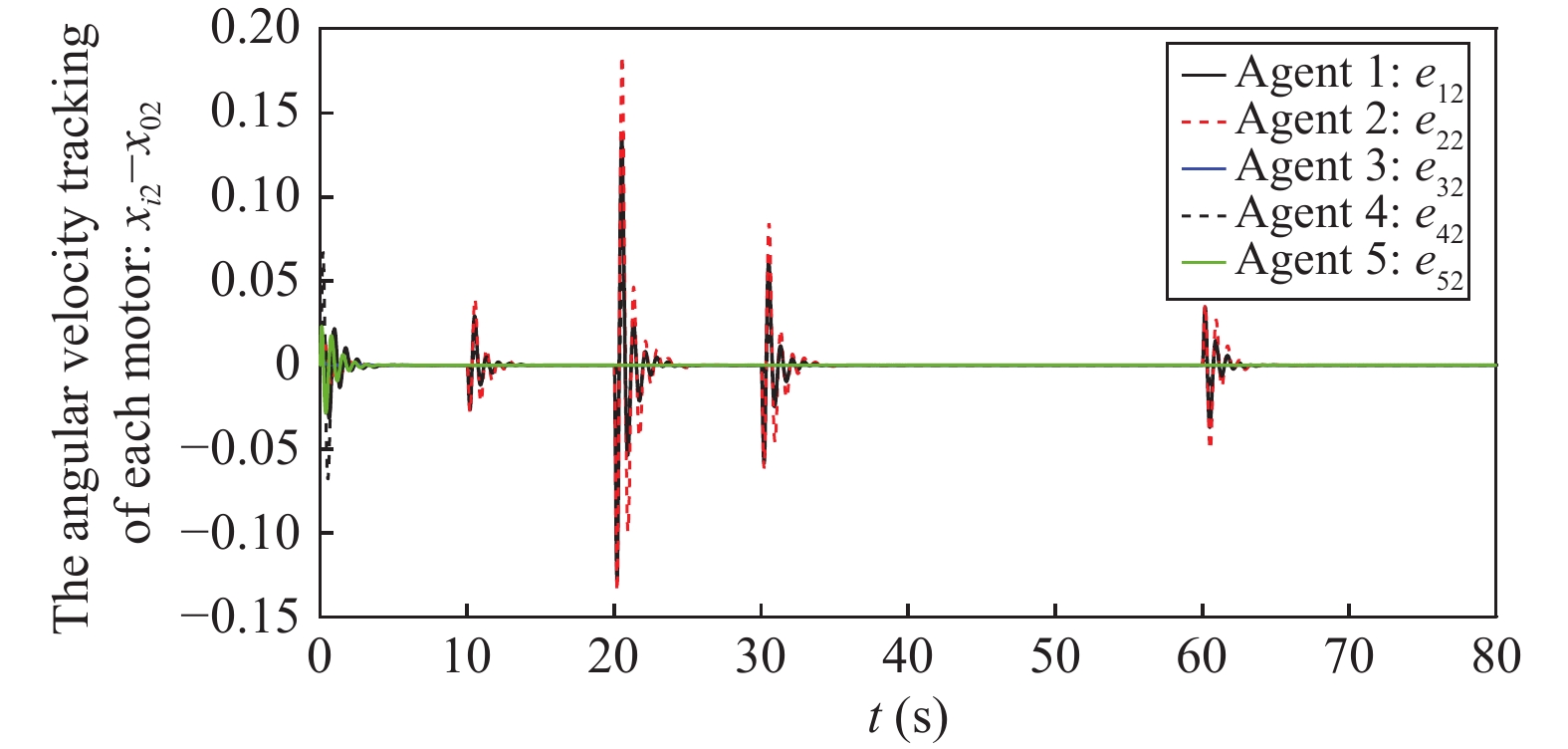
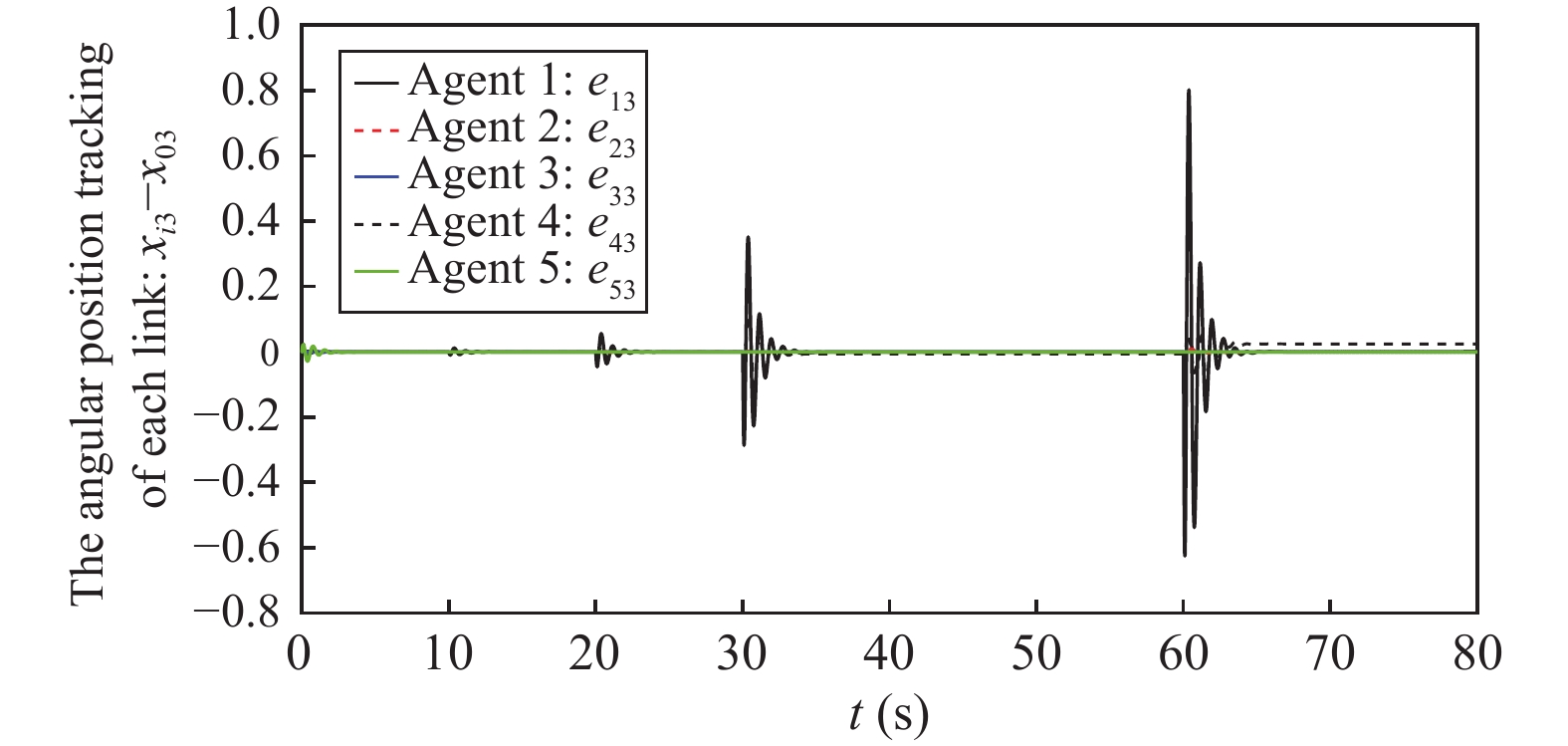
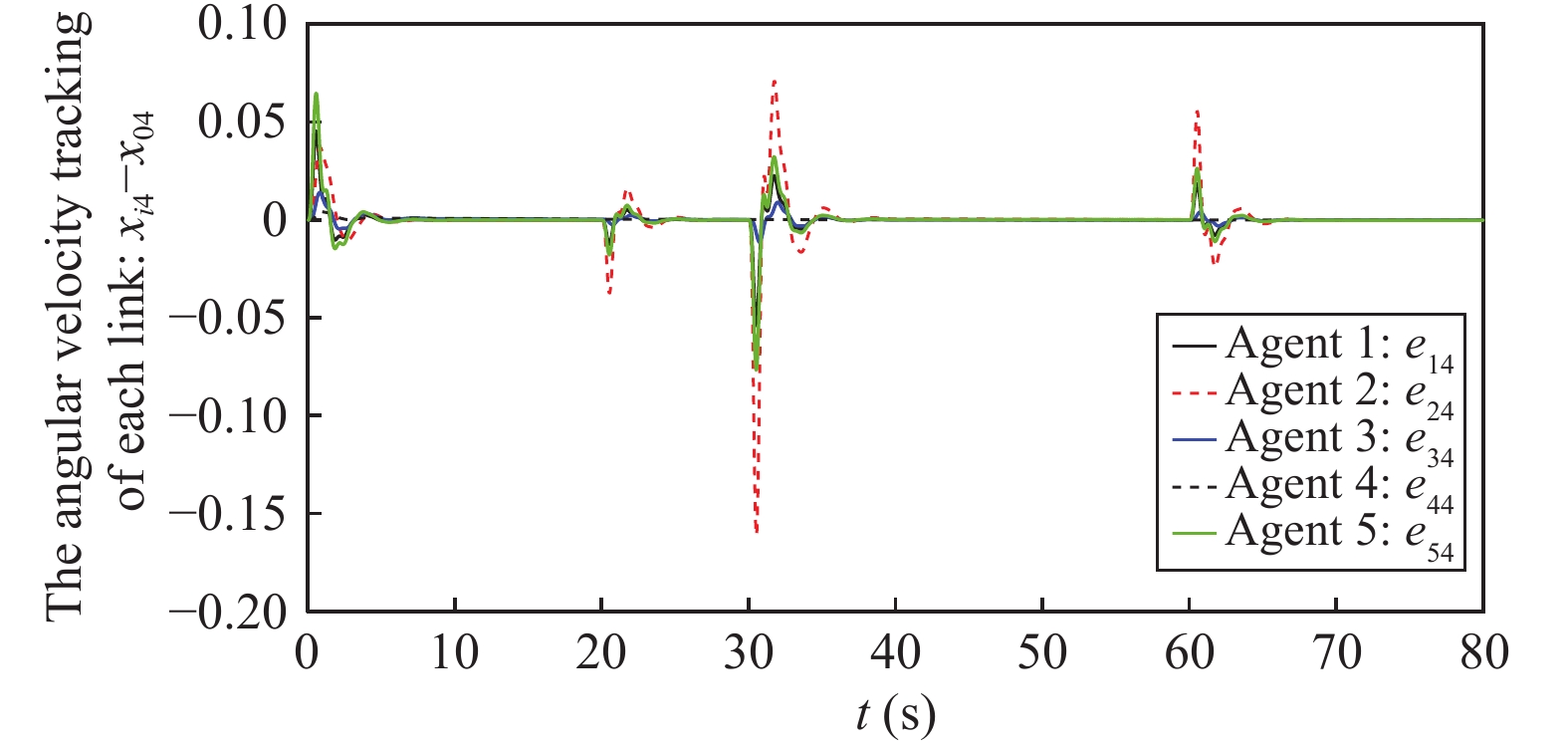
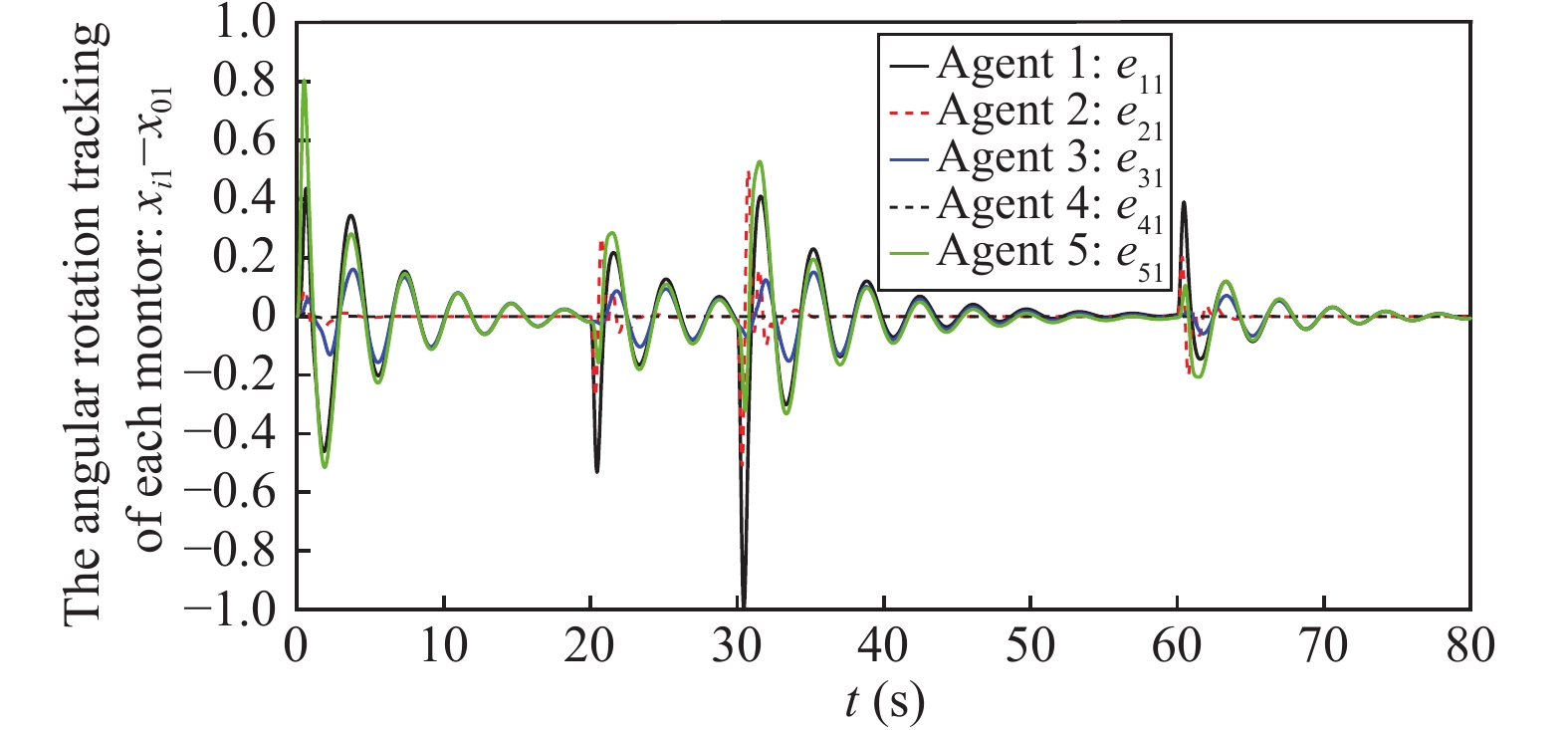

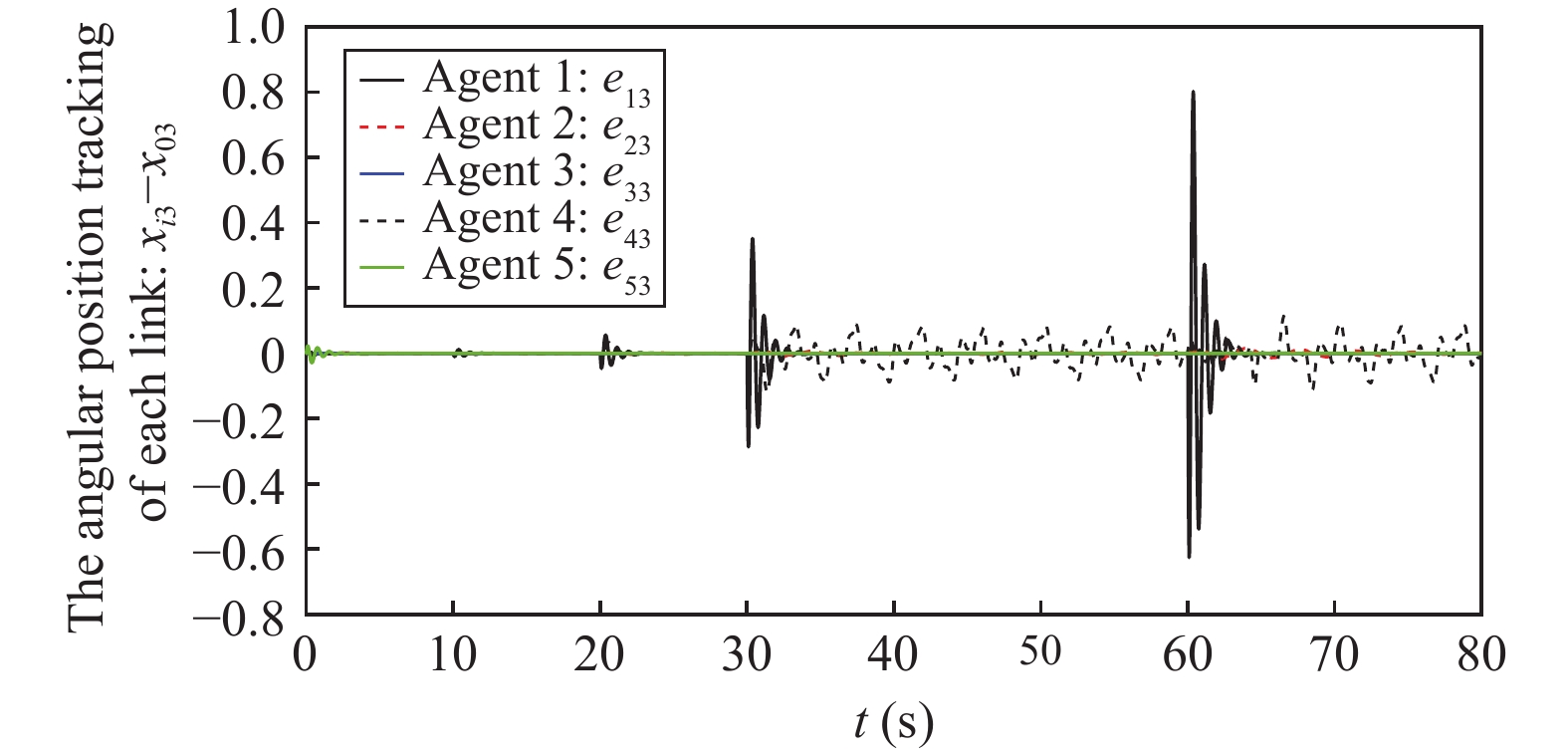
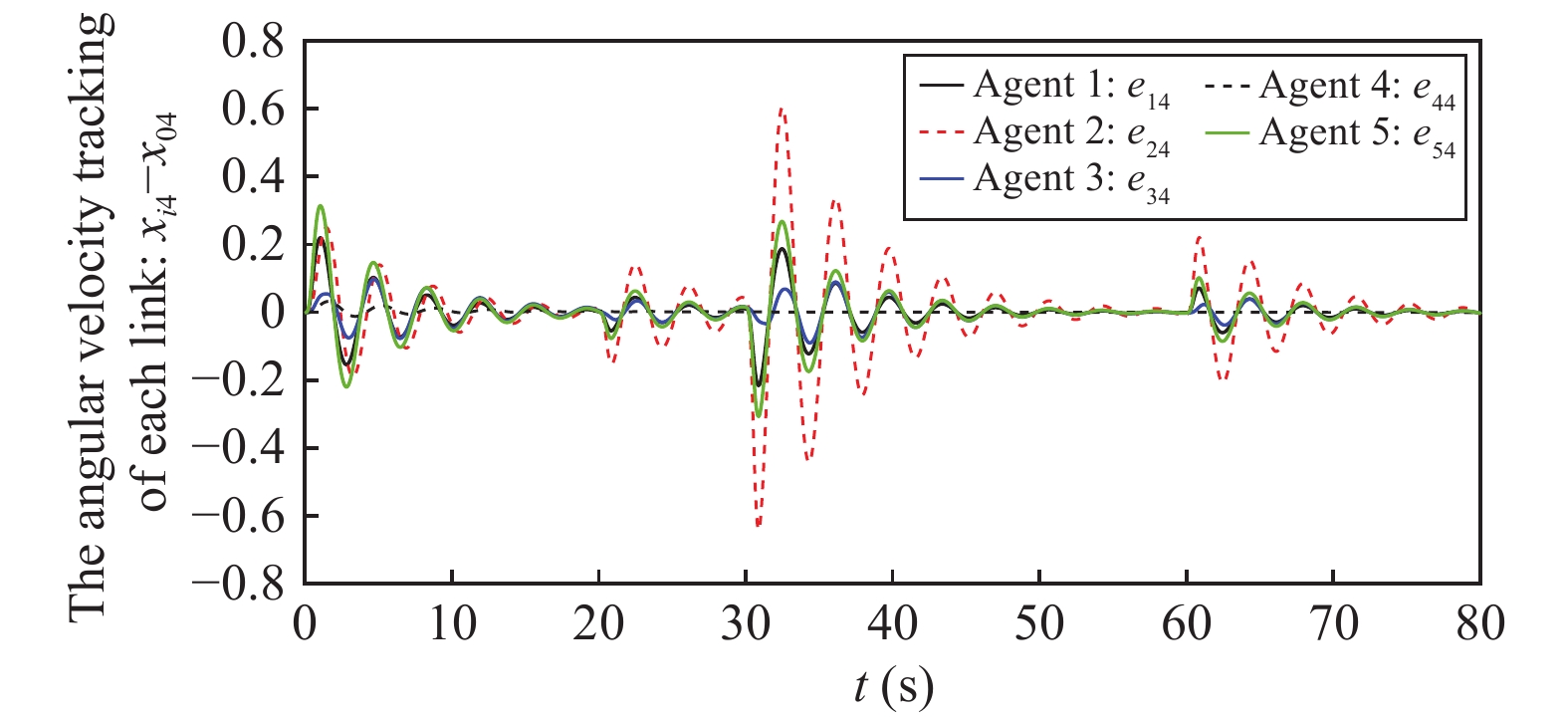
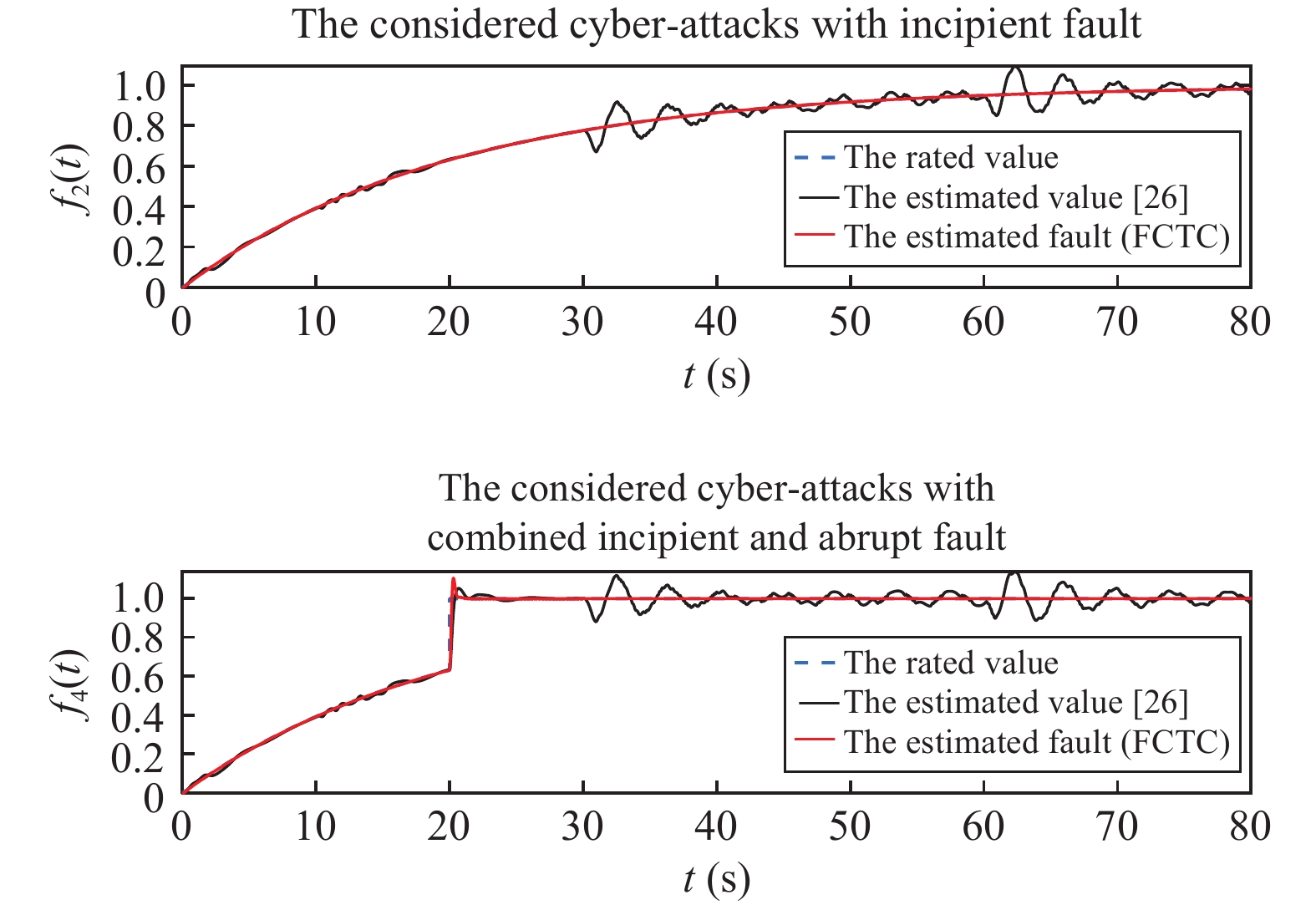
Fig. 13 shows the rated and estimated incipient faults of the second manipulator and the combined incipient and abrupt faults of the fourth manipulator. Compared with our previous hierarchical FE and fault-tolerant control scheme [26], the proposed FE scheme in the distributed FCTC algorithm has smaller estimation error and better robustness at each cyber-attack occurring time instants. Fig. 14 depicts the rated and estimated values under the considered connectivity-maintained attacks without fault, the connectivity-mixed attacks with incipient fault and abrupt fault, respectively. In this case, our previous FE/fault-tolerant algorithm [26] cannot achieve an excellent estimation effect, and the phenomenon of continuous non-dissipation oscillation or deviation occurs under the considered connectivity-mixed attacks.

A novel UIO-based FE and FCTC method was proposed in this study to ensure that nonlinear leader-following MASs can realize the exponential consensus tracking objective regardless of incipient/abrupt actuator faults and cyber-attacks. Distributed FCTC protocols based on fault and state estimations from the decentralized FE hierarchy and the relative adjacent output information of each individual agent were proposed in connectivity-maintained and connectivity-mixed attack cases. Two sufficient criteria utilizing the ADT, attack frequency, and attack activation rate method were proposed to ensure the prescribed consensus tracking performance. Multistep calculations were demonstrated to derive parameters in decentralized FE and distributed FCTC algorithms for both cases. Simulations proved the effectiveness of the proposed FCTC scheme. Future studies could fruitfully explore the consensus tracking issue of heterogeneous nonlinear MASs subject to complicated time-varying actuator and sensor faults in physical hierarchy and hostile DoS attacks in networked hierarchy further by the improved distributed event-triggered FCTC scheme with a substantial reduction in computational resources when message transmission fails intermittently.
| [1] |
H. B. Du, Z. Q. Chen, and G. H. Wen, “Leader-following attitude consensus for spacecraft formation with rigid and flexible spacecraft,” J. Guid. Control Dyn., vol. 39, no. 4, pp. 941–948, 2016.
|
| [2] |
Q. S. Wang, D. Huang, Z. S. Duan, and J. Y. Wang, “Consensus tracking control with transient performance improvement for a group of unmanned aerial vehicles subject to faults and parameter uncertainty,” Int. J. Control, vol. 92, no. 4, pp. 796–815, 2019. doi: 10.1080/00207179.2017.1370555
|
| [3] |
W. Wang, J. S. Huang, C. Y. Wen, and H. J. Fan, “Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots,” Automatica, vol. 50, no. 4, pp. 1254–1263, 2014. doi: 10.1016/j.automatica.2014.02.028
|
| [4] |
J. H. Qin, Q. C. Ma, Y. Shi, and L. Wang, “Recent advances in consensus of multi-agent systems: A brief survey,” IEEE Trans. Ind. Electron., vol. 64, no. 6, pp. 4972–4983, 2017. doi: 10.1109/TIE.2016.2636810
|
| [5] |
M. E. Valcher and I. Zorzan, “On the consensus of homogeneous multi-agent systems with arbitrarily switching topology,” Automatica, vol. 84, pp. 79–85, 2017. doi: 10.1016/j.automatica.2017.07.011
|
| [6] |
Z. Y. Zuo, B. L. Tian, M. Defoort, and Z. T. Ding, “Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics,” IEEE Trans. Autom. Control, vol. 63, no. 2, pp. 563–570, 2018. doi: 10.1109/TAC.2017.2729502
|
| [7] |
B. Cheng, X. K. Wang, and Z. K. Li, “Event-triggered consensus of homogeneous and heterogeneous multiagent systems with jointly connected switching topologies,” IEEE Trans. Cybern., vol. 49, no. 12, pp. 4421–4430, 2019. doi: 10.1109/TCYB.2018.2864974
|
| [8] |
M. L. Lv, W. W. Yu, J. D. Cao, and S. Baldi, “A separation-based methodology to consensus tracking of switched high-order nonlinear multiagent systems,” IEEE Trans. Neural Netw. Learn. Syst., 2021. DOI: 10.1109/TNNLS.2021.3070824
|
| [9] |
W. L. He, Z. K. Mo, Q. L. Han, and F. Qian, “Secure impulsive synchronization in Lipschitz-type multi-agent systems subject to deception attacks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1326–1334, 2020.
|
| [10] |
P. Cheng, Z. Y. Yang, J. M. Chen, et al., “An event-based stealthy attack on remote state estimation,” IEEE Trans. Autom. Control, vol. 65, no. 10, pp. 4348–4355, 2020. doi: 10.1109/TAC.2019.2956021
|
| [11] |
M. L. Lv, W. W. Yu, J. D. Cao, and S. Baldi, “Consensus in high-power multiagent systems with mixed unknown control directions via hybrid nussbaum-based control,” IEEE Trans. Cybern., 2020. DOI: 10.1109/TCYB.2020.3028171
|
| [12] |
S. Wu, K. M. Ding, P. Cheng, and L. Shi, “Optimal scheduling of multiple sensors over lossy and bandwidth limited channels,” IEEE Trans. Control Netw. Syst., vol. 7, no. 3, pp. 1188–1200, 2020. doi: 10.1109/TCNS.2020.2966671
|
| [13] |
D. Ye and X. Yang, “Distributed event-triggered consensus for nonlinear multi-agent systems subject to cyber attacks,” Inf. Sci., vol. 473, pp. 178–189, 2019. doi: 10.1016/j.ins.2018.09.030
|
| [14] |
D. R. Ding, Z. D. Wang, D. W. C. Ho, and G. L. Wei, “Observer-based event-triggering consensus control for multiagent systems with lossy sensors and cyber-attacks,” IEEE Trans. Cybern., vol. 47, no. 8, pp. 1936–1947, 2017. doi: 10.1109/TCYB.2016.2582802
|
| [15] |
K. F. E. Tsang, M. Y. Huang, K. H. Johansson, and L. Shi, “Sparse linear injection attack on multi-agent consensus control systems,” IEEE Control Syst. Lett., vol. 5, no. 2, pp. 665–670, 2021. doi: 10.1109/LCSYS.2020.3004920
|
| [16] |
D. Zhang, G. Feng, Y. Shi, and D. Srinivasan, “Physical safety and cyber security analysis of multi-agent systems: A survey of recent advances,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 319–333, 2021. doi: 10.1109/JAS.2021.1003820
|
| [17] |
Y. Xu, M. Fang, Z. G. Wu, et al., “Input-based event-triggering consensus of multiagent systems under denial-of-service attacks,” IEEE Trans. Syst. Man Cybern. -Syst., vol. 50, no. 4, pp. 1455–1464, 2020. doi: 10.1109/TSMC.2018.2875250
|
| [18] |
W. M. Fu, J. H. Qin, Y. Shi, et al., “Resilient consensus of discrete-time complex cyber-physical networks under deception attacks,” IEEE Trans. Ind. Inform., vol. 16, no. 7, pp. 4868–4877, 2020. doi: 10.1109/TII.2019.2933596
|
| [19] |
Y. Yang, H. W. Xu, and D. Yue, “Observer-based distributed secure consensus control of a class of linear multi-agent systems subject to random attacks,” IEEE Trans. Circuits Syst. I-Regul. Pap., vol. 66, no. 8, pp. 3089–3099, 2019. doi: 10.1109/TCSI.2019.2904747
|
| [20] |
Z. Feng, G. Q. Hu, and G. H. Wen, “Distributed consensus tracking for multi-agent systems under two types of attacks,” Int. J. Robust Nonlinear Control, vol. 26, no. 5, pp. 896–918, 2016. doi: 10.1002/rnc.3342
|
| [21] |
H. Yang, Q. L. Han, X. H. Ge, et al., “Fault-tolerant cooperative control of multiagent systems: A survey of trends and methodologies,” IEEE Trans. Ind. Inform., vol. 16, no. 1, pp. 4–17, 2020. doi: 10.1109/TII.2019.2945004
|
| [22] |
D. Ye, X. G. Zhao, and B. Cao, “Distributed adaptive fault-tolerant consensus tracking of multi-agent systems against time-varying actuator faults,” IET Contr. Theory Appl., vol. 10, no. 5, pp. 554–563, 2016. doi: 10.1049/iet-cta.2015.0790
|
| [23] |
Z. Q. Zuo, J. Zhang, and Y. J. Wang, “Adaptive fault-tolerant tracking control for linear and Lipchitz nonlinear multi-agent systems,” IEEE Trans. Ind. Electron., vol. 62, no. 6, pp. 3923–3931, 2015.
|
| [24] |
C. Deng, W. N. Gao, and W. W. Che, “Distributed adaptive fault-tolerant output regulation of heterogeneous multi-agent systems with coupling uncertainties and actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1098–1106, 2020. doi: 10.1109/JAS.2020.1003258
|
| [25] |
X. Z. Jin, S. F. Wang, J. H. Qin, et al., “Adaptive fault-tolerant consensus for a class of uncertain nonlinear second-order multi-agent systems with circuit implementation,” IEEE Trans. Circuits Syst. I-Regul. Pap., vol. 65, no. 7, pp. 2243–2255, 2018. doi: 10.1109/TCSI.2017.2782729
|
| [26] |
C. Liu, B. Jiang, K. Zhang, and R. J. Patton, “Hierarchical structure-based fault estimation and fault-tolerant control for multiagent systems,” IEEE Trans. Control Netw. Syst., vol. 6, no. 2, pp. 586–597, 2019. doi: 10.1109/TCNS.2018.2860460
|
| [27] |
D. Ye, M. M. Chen, and H. J. Yang, “Distributed adaptive event-triggered fault-tolerant consensus of multiagent systems with general linear dynamics,” IEEE Trans. Cybern., vol. 49, no. 3, pp. 757–767, 2019. doi: 10.1109/TCYB.2017.2782731
|
| [28] |
X. Wang and G. H. Yang, “Fault-tolerant consensus tracking control for linear multiagent systems under switching directed network,” IEEE Trans. Cybern., vol. 50, no. 5, pp. 1921–1930, 2020. doi: 10.1109/TCYB.2019.2901542
|
| [29] |
Y. M. Wu, Z. S. Wang, S. B. Ding, and H. G. Zhang, “Leader-follower consensus of multi-agent systems in directed networks with actuator faults,” Neurocomputing, vol. 275, pp. 1177–1185, 2018. doi: 10.1016/j.neucom.2017.09.066
|
| [30] |
X. X. Hua, D. R. Huang, and S. H. Guo, “Extended state observer based on ADRC of linear system with incipient fault,” Int. J. Control Autom. Syst., vol. 18, pp. 1425–1424, 2020. doi: 10.1007/s12555-019-0052-2
|
| [31] |
Y. M. Wu and X. X. He, “Secure consensus control for multi-agent systems with attacks and communication delays,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 1, pp. 136–142, 2017. doi: 10.1109/JAS.2016.7510010
|
| [32] |
C. Deng and C. Y. Wen, “Distributed resilient observer-based fault-tolerant control for heterogeneous multi-agent systems under actuator faults and DoS attacks,” IEEE Trans. Control Netw. Syst., vol. 7, no. 3, pp. 1308–1318, 2020. doi: 10.1109/TCNS.2020.2972601
|
| [33] |
L. Zhao and G. H. Yang, “Adaptive fault-tolerant control for nonlinear multi-agent systems with DoS attacks,” Inf. Sci., vol. 526, pp. 39–53, 2020. doi: 10.1016/j.ins.2020.03.083
|
| [34] |
L. Zhao and G. H. Yang, “Cooperative adaptive fault-tolerant control for multi-agent systems with deception attacks,” J. Frankl. Inst., vol. 357, no. 6, pp. 3419–3433, 2020. doi: 10.1016/j.jfranklin.2019.12.032
|
| [35] |
P. Yu, L. Ding, Z. W. Liu, and Z. H. Guan, “A distributed event-triggered transmission strategy for exponential consensus of general linear multi-agent systems with directed topology,” J. Frankl. Inst., vol. 352, no. 12, pp. 5866–5881, 2015. doi: 10.1016/j.jfranklin.2015.10.014
|
| [36] |
Q. Song, F. Liu, J. D. Cao, and W. W. Yu, “Pinning-controllability analysis of complex networks: An M-matrix approach,” IEEE Trans. Circuits Syst. I-Regul. Pap., vol. 59, no. 11, pp. 2692–2701, 2012. doi: 10.1109/TCSI.2012.2190573
|
| [37] |
C. Peng, J. Zhang, and Q. L. Han, “Consensus of multiagent systems with nonlinear dynamics using an integrated sampled-data-based event-triggered communication scheme,” IEEE Trans. Syst. Man Cybern. -Syst., vol. 49, no. 3, pp. 589–599, 2019. doi: 10.1109/TSMC.2018.2814572
|
| [1] | Shouyan Chen, Weitian He, Zhijia Zhao, Yun Feng, Zhijie Liu, Keum-Shik Hong. Adaptive Control of a Flexible Manipulator With Unknown Hysteresis and Intermittent Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 148-158. doi: 10.1109/JAS.2024.124653 |
| [2] | Pei-Ming Liu, Xiang-Gui Guo, Jian-Liang Wang, Daniel Coutinho, Lihua Xie. Chattering-Free Fault-Tolerant Cluster Control and Fault Direction Identification for HIL UAV Swarm With Pre-Specified Performance[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 183-197. doi: 10.1109/JAS.2024.124827 |
| [3] | Chao Zhou, Zehui Mao, Bin Jiang, Xing-Gang Yan. Adaptive Fault-Tolerant Consensus Tracking Control for Nonlinear Multi-Agent Systems With Double Semi-Markovian Switching Topologies and Unknown Control Directions[J]. IEEE/CAA Journal of Automatica Sinica. doi: 10.1109/JAS.2025.125285 |
| [4] | Zongyu Zuo, Jingchuan Tang, Ruiqi Ke, Qing-Long Han. Hyperbolic Tangent Function-Based Protocols for Global/Semi-Global Finite-Time Consensus of Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(6): 1381-1397. doi: 10.1109/JAS.2024.124485 |
| [5] | Xiangqian Yao, Hao Sun, Zhijia Zhao, Yu Liu. Event-Triggered Bipartite Consensus Tracking and Vibration Control of Flexible Timoshenko Manipulators Under Time-Varying Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1190-1201. doi: 10.1109/JAS.2024.124266 |
| [6] | Honghai Wang, Qing-Long Han. Designing Proportional-Integral Consensus Protocols for Second-Order Multi-Agent Systems Using Delayed and Memorized State Information[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 878-892. doi: 10.1109/JAS.2024.124308 |
| [7] | Meilin Li, Yue Long, Tieshan Li, Hongjing Liang, C. L. Philip Chen. Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 649-660. doi: 10.1109/JAS.2023.123582 |
| [8] | Jingshu Sang, Dazhong Ma, Yu Zhou. Group-Consensus of Hierarchical Containment Control for Linear Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1462-1474. doi: 10.1109/JAS.2023.123528 |
| [9] | Meng Zhou, Zhengcai Cao, Ye Wang. Robust Fault Detection and Isolation Based on Finite-frequency H−/H∞ Unknown Input Observers and Zonotopic Threshold Analysis[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 750-759. doi: 10.1109/JAS.2019.1911492 |
| [10] | Zhaoxia Wang, Minrui Fei, Dajun Du, Min Zheng. Decentralized Event-Triggered Average Consensus for Multi-Agent Systems in CPSs with Communication Constraints[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 248-257. |
| [11] | Zhenhua Wang, Juanjuan Xu, Huanshui Zhang. Consensus Seeking for Discrete-time Multi-agent Systems with Communication Delay[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 151-157. |
| [12] | Chuanrui Wang, Xinghu Wang, Haibo Ji. A Continuous Leader-following Consensus Control Strategy for a Class of Uncertain Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 187-192. |
| [13] | Hongjing Liang, Huaguang Zhang, Zhanshan Wang, Junyi Wang. Consensus Robust Output Regulation of Discrete-time Linear Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 204-209. |
| [14] | Hao Zhang, Gang Feng, Huaicheng Yan, Qijun Chen. Distributed Self-triggered Control for Consensus of Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40-45. |
| [15] | Wenhui Liu, Feiqi Deng, Jiarong Liang, Haijun Liu. Distributed Average Consensus in Multi-agent Networks with Limited Bandwidth and Time-delays[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 193-203. |
| [16] | Nan Xiao, Xuehe Wang, Lihua Xie, Tichakorn Wongpiromsarn, Emilio Frazzoli, Daniela Rus. Road Pricing Design Based on Game Theory and Multi-agent Consensus[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 31-39. |
| [17] | Jianming Wei, Yunan Hu, Meimei Sun. Adaptive Iterative Learning Control for a Class of Nonlinear Time-varying Systems with Unknown Delays and Input Dead-zone[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 302-314. |
| [18] | Chenghui Zhang, Le Chang, Xianfu Zhang. Leader-follower Consensus of Upper-triangular Nonlinear Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 210-217. |
| [19] | Airong Wei, Xiaoming Hu, Yuzhen Wang. Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 84-91. |
| [20] | Wen Qin, Zhongxin Liu, Zengqiang Chen. Formation Control for Nonlinear Multi-agent Systems with Linear Extended State Observer[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 171-179. |

Figures(14) / Tables(1)




C. Liu, B. Jiang, X. F. Wang, H. L. Yang, and S. R. Xie, “Distributed fault-tolerant consensus tracking of multi-agent systems under cyber-attacks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 6, pp. 1037–1048, Jun. 2022. doi: 10.1109/JAS.2022.105419
| Parameter | Physical meaning | Value/Unit |
| $ J_m $ | Inertia of the motor | $0.0037\;{\rm kg.m^2}$ |
| $ J_l $ | Inertia of the link | $0.0093\;{\rm kg.m^2}$ |
| $ k_s $ | Torsional spring constant | $0.18\;{\rm Nm/rad}$ |
| $ k_{\tau} $ | Amplifier gain | $0.08\;{\rm Nm/V}$ |
| $ \eta $ | Transformation coefficient | $ 0.1 $ |
| $l_{\rm{link} }$ | Length of the link | $0.31\;{\rm m}$ |
| $ h $ | Center of gravity height | $0.015\;{\rm m}$ |
| $ m $ | Point mass of the arm | $0.139\;{\rm kg}$ |
| $ g $ | Gravity constant | $9.8\;{\rm m/s^2}$ |
DownLoad:
CSV
 DownLoad:
DownLoad:






























































































































































































































































 DownLoad:
DownLoad:












