









































































































Figure
1.
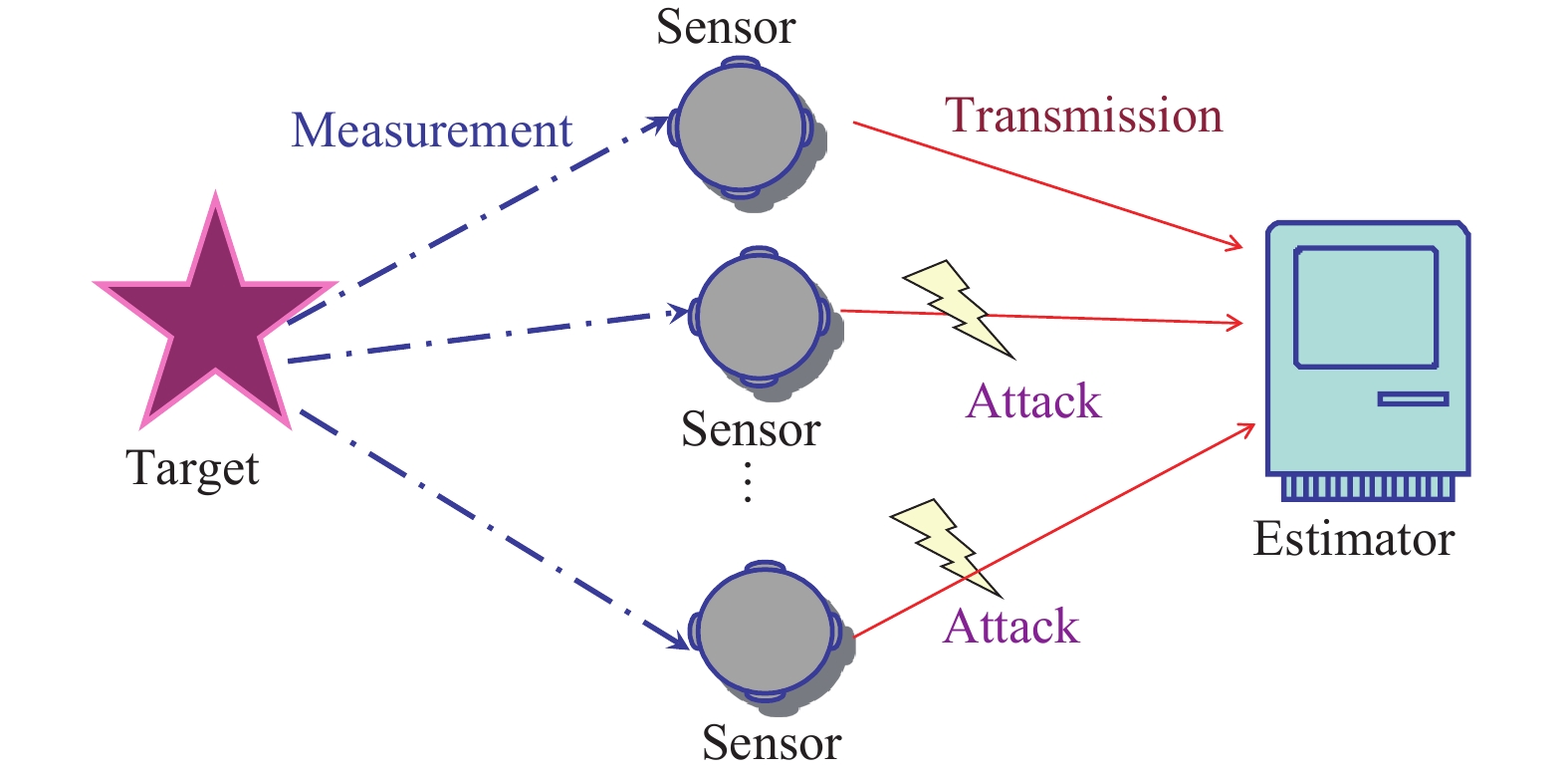
The estimation network under attack
 Volume 7
Issue 5
Volume 7
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | Ya Zhang, Lishuang Du and Frank L. Lewis, "Stochastic DoS Attack Allocation Against Collaborative Estimation in Sensor Networks," IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1225-1234, Sept. 2020. doi: 10.1109/JAS.2020.1003285

|
WIRELESS sensor networks (WSNs), which are interconnected by a large number of cooperative wireless sensor nodes, have been extensively applied in many areas [1]. The optimal estimation algorithms based on minimum mean square error, such as Kalman filtering and information filtering, are often used in WSN state estimation for obtaining accurate estimate [2]–[7]. However, due to the wireless communication characteristics of WSNs, attackers can easily monitor the channels in the task domain of the network, inject bitstream into the channel, and replay the previously captured packets [8]–[10]. It is important to conduct in-depth research on attacks in sensor networks.
The research on state estimation of networks under attacks can be classified into two categories: one is secure estimation against attacks, the other is to place the attacks from the standpoint of attackers. Secure estimation in centralized or distributed networks has been studied preliminarily. Chi-square detection and Euclidean detector were used to detect data anomalies caused by attacks [11]–[14]. Scheduling strategies including event triggering strategies were proposed out to mitigate the impact of attacks [15]–[17]. K-means algorithm for classifying trust nodes had also been studied [18]. In [19], a distributed secure estimation problem on GE F404 engine was researched. An efficient distributed resilient estimator and attack detection mechanism for sensor networks under deception attacks on both the system dynamics and sensor intercommunication links were proposed in [20]. A distributed finite-time filter was proposed for discrete time positive systems in sensor networks under random deception attacks [21]. Du et al. [22] studied distributed state estimation problem under deception attacks and denial of service (DoS) attacks, and proposed a novel alternating direction method of multipliers (ADMM)-based distributed state estimation method.
How to allocate attacks is another hot topic [23]–[29]. DoS attacks can cause network congestion and packet losses, which makes the remote estimator difficult to obtain uniformly bounded state estimation errors in the network. Qin et al. [23] studied the optimal attack scheduling scheme of the energy-constrained attacker in packet-dropping networks. The corresponding time-centralized attack strategies were given to maximize the trace of the average estimation error and the terminal estimation error. Similarly, using the Markov decision process, Ding et al. [24] proposed a two-player zero-sum stochastic game framework to investigate such a situation: sensors need to select a single channel to send data packets and reduce the possibility of being attacked; at the same time, attackers need to determine the attacked channel under the constraints of energy budget. Cao et al. [25] proposed a probabilistic DoS attack scheme against remote state estimator over a Markov channel in cyber-physical systems. Li et al. [26] designed an attack jamming approach on remote state estimation in cyber-physical systems by using a game theory. Zhang et al. [27], [28] studied a scenario, in which the optimal attack power allocation of energy-constrained DoS attackers to maximize the terminal estimation error was discussed. An attack power allocation mechanism with low cost was put forward. A dynamic attack energy disposal algorithm with ascertained attack capability in each period was also designed. In relevant works, most of the considerations focus on DoS attacks in single channel between the sensor and the remote estimator. Few researches have discussed DoS attack allocation in multiple channels of cooperative sensor networks. In [23] an attack scheduling approach was proposed to maximize the sum of the estimation errors of two remote estimators corresponding to two sensors, with the assumption that each sensor was completely observable. Yang et al. [29] studied DoS attack arrangement within an energy budget in centralized state estimation, and proposed a selection scheme of which sensor to be attacked under the assumption that different kinds of sensors are completely observable.
Although the DoS attack allocation problem has attracted wide attention [23]–[29], to the best of our knowledge, the problem of DoS attack scheduling in collaboratively working sensor networks has not been well addressed in the literature. The main difficulties may come from the following two aspects.
1) The network is composed of multiple heterogeneous sensors and single sensor is not necessarily observable. Unlike previous works [23], [27], [28], where the steady-state value is used to update estimation when there is no attack, in this paper each sensor transmits its measurement and the remote estimator uses the received measurements to update estimation. The existing attack scheduling schemes for remote estimator with one observable sensor cannot be applicable.
2) The attack probabilities and attack energy to be exerted by the attacker to the sensors can be different. The function of the packet dropout probability about attack energy is nonlinear and there is trade-off between collective observability and attack energy. Hence the attack scheduling problem is a nonlinear programming problem with high complexity and computation.
This paper focuses on designing a stochastic scheduling and attack power allocation scheme from the perspective of the energy-constrained DoS attacker, so as to influence the estimation of the collaboratively working sensor network with minimum attack energy cost. An allocation scheme consisting of three steps is proposed. The contributions of this paper contain the following.
1) Unlike attack allocation in single sensor’s communication [23]–[28], in sensor networks, multiple sensors’ channels should be attacked. The minimum number of channels needed to attack and how to select the channels are given.
2) A necessary condition and a sufficient condition on the packet loss probabilities of the attacked channels such that the mean square estimation error of the estimator is divergent are provided.
3) The optimal attack probabilities and attack power with minimum energy consumption to destroy the collective observability of the network are proposed.
The rest of this paper is arranged as follows. Section II formulates the filter in WSNs and DoS attack model, and states an overview of the problem. In Section III, the minimum number of channels needed to attack and how to select the channels are firstly given, and then the conditions of the packet loss probabilities making the estimation error divergent are provided for general and special systems respectively. In Section IV the optimal attack probability and power with minimum energy consumption are discussed. Finally, in Section V, the simulation results verify the effectiveness of the attack mechanism.
Notations:
In this section, the target’s system model, the sensor network, the impacts of DoS attacks, and the optimal attack allocation problem are formulated.
Consider a linear time-invariant system to be monitored:
| xk+1=Axk+vk | (1) |
where
A sensor network composed of
| zi,k=Cixk+wi,k | (2) |
where
Assumption 1: The system matrix
A centralized information Kalman filter is adopted in the remote estimator to estimate the state of the target. Sensors in the network transmit their innovation vectors
Assumption 2: All sensors are clock synchronized and there is no communication delay in the network. When there is no attack in the network, there is no packet dropout. The packet that each sensor transmits at each time instant consists of
The estimator firstly computes the a priori information matrix and vector as following:
| Ω−k=[A(Ω+k−1)−1AT+Q]−1 | (3) |
| x−k=Ax+k−1. | (4) |
Then, the information fusion center updates the a posteriori estimate by using the received information [5]
| Ω+k=Ω−k+∑si∈V0kCTiR−1iCi | (5) |
and
| x+k=(Ω+k)−1(Ω−kx−k+∑si∈V0kCTiR−1izi,k) | (6) |
where
There exists an attacker in the network. The purpose of the attacker is to occupy the communication bandwidth by DoS attack, which jams some channels between sensors and the remote estimator and increases the packet loss probabilities. Under DoS attacks, the remote estimator may not estimate the system state successfully.
If the communication channel from sensor
| ρi=δsGsδaiGa+σ2 | (7) |
where
The transmitted packet of each sensor consists of multiple bits, and only if every bit is received correctly, the packet is considered as successfully received. Then from Assumption 2, the probability of one packet reception is described as [28]
| μi=[1−Q(√2ρi)]L | (8) |
where
| pi=1−μi. | (9) |
When sensor
Considering a limited energy budget, there is no need for the attacker to keep implementing DoS attacks to one channel with high attack power at every time. Therefore, we consider the stochastic attack mechanism satisfying the following assumption.
Assumption 3 (Attack Rule): The attacker randomly exerts DoS attacks to part of transmission channels with certain fixed probabilities and power.
Under the stochastic DoS attack scheme, each channel is inflicted by attack with some probability. Define
Being exposed to attack results in significantly increased packet loss probability. We define another variable
Due to the stochastic properties of the attacks and packet losses,
| di,k={1,withprobabilityγipi0,withprobability1−γipi. | (10) |
The block diagram for the sensor network under attack is shown in Fig. 1.
The attacker’s intention is to prevent the remote estimator from obtaining the effective state estimate with a bounded mean square estimation error. Since the packets of the sensors are lost randomly, the DoS attacker aims at making the trace of the mathematical expectation on a prior covariance matrix
Problem 1:
| minN∑i=1γiδais.t.limk→∞trE{P−k}→∞. |
In the following sections, we will investigate how to select
Remark 1: It should be noted that considering a control input signal for the system does not affect the problem formulation if the control input is known to the estimator.
To solve Problem 1, we can search the optimal attack probabilities and power by using the condition of
To begin with, we give the equation of the expected covariance matrix.
Define
Define
Therefore, from (3), (5), and the Matrix Inversion Lemma, we obtain
| P−k+1=AP−kAT+Q−AP−kˉCkT×(ˉCkP−kˉCkT+ˉRk)−1ˉCkP−kAT | (11) |
and its expected value is
| E{P−k+1}=E{AP−kAT+Q−AP−kˉCTk×(ˉCkP−kˉCkT+ˉRk)−1ˉCkP−kAT}. | (12) |
Let
| Pr(V0k=Jt)=∏i∈Jt(1−γipi)∏j∉Jtγjpj. | (13) |
Then, the mathematical expectation expression of state error covariance satisfies the following equation:
| E{P−k+1|P−k}=∏j∈VγjpjAP−kAT+Q+∑Jt∈˜J∖∅∏i∈Jt(1−γipi)∏j∉Jtγjpj[AP−kAT+Q−AP−kCTJt(CJtP−kCTJt+RJt)−1CJtP−kAT)] | (14) |
where
For formulation convenience, we define operators
| g(P−k∣Jt)=AP−kAT+Q−AP−kCTJt(CJtP−kCTJt+RJt)−1CJtP−kAT | (15) |
when
| g(P−k∣Jt)=AP−kAT+Q. | (16) |
Therefore,
| E{P−k+1|P−k}=∑Jt∈˜J∏i∈Jt(1−γipi)∏j∉Jtγjpjg(P−k∣Jt). | (17) |
To destroy the observability of the entire network for the sake of preventing the estimator from obtaining effective state estimation, at least a certain number of channels are required to attack. This subsection discusses the minimum number of attacked channels to destroy the collective observability of the network. An effective way to enhance the aggressivity and reduce the energy of the attacker is to select fixed channels to attack. For design simplicity, we consider the attack model satisfying the following assumption.
Assumption 4: The attacker is allocated to attack fixed sensors’ channels.
In the following part, the existence of the minimum number of attacked channels is investigated by the concept of network collaborative observability. Before discussion, the concept of undetectable subspace should be introduced. Let the unstable subspace of system matrix
| U−i={x∈Rnx∣CiAlx=0,l=0,1,…,nx−1}∩{x∣x∈U(A)}. | (18) |
For any node subset
| U−Vs=⋂i∈VsU−i. | (19) |
Proposition 1: For system (1) and sensor networks satisfying Assumptions 1–4, there is a minimum number of channels needed to be attacked. Once the number of the attacked channels is less than it, the estimation error of the estimator must be bounded in mean square. The minimum number
| mmin=min{|Vs|:U−V/Vs≠∅}. | (20) |
Proof: Assume there are
When
Remark 2: We can search
To simplify the problem, in the following, we will fix the possible attacked node set as
In this subsection, we mainly investigate the condition of the packet loss probabilities on the channels of the nodes in
Lemma 1: The sequence
| Pk+1=M∑s=1rJsg(Pk∣Js) | (21) |
is convergent and bounded, if and only if there exist a symmetric positive definite matrix
Proof: According to the Schur complement lemma,
| ˉP>M∑s=1rJs[(A−ˉFJsCJs)ˉP(A−ˉFJsCJs)T]. | (23) |
Necessity: If the sequence (21) is convergent, there exists
Sufficiency: Firstly, we prove that when
Define linear operators
| f(P)=M∑s=1rJs(A−ˉFJsCJs)P(A−ˉFJsCJs)Tϕ(¯K,P)=M∑s=1rJs[(A−ˉKJsCJs)P(A−ˉKJsCJs)T+ˉKJsRJtˉKTJs]+Q |
where
| f(P0)≤f(α1ˉP)=α1f(ˉP)≤α1βˉP |
and thus
| fk(P0)≤α1βfk−1(ˉP)≤α1β2fk−2(ˉP)≤α1βkˉP. |
Since when
| Pk+1≤ϕ(¯F,Pk)=f(Pk)+U≤fk(P0)+k−1∑t=0ft(U)≤α1βkˉP+k−1∑t=0α2βtˉP≤(α1+α21−β)ˉP |
where
| Ω(λ1,λ2,…,λm)=[−X√rJ1(XA−YJ1CJ1)√rJ2(XA−YJ2CJ2)…√rJM(XA−YJMCJM)∗−X∗−X⋮⋱∗−X] | (22) |
Secondly, we prove its convergence. For sequence
For sequence
| 0≤ˆPk+1−ˉP≤ϕ(¯F,ˆPk)−ϕ(¯F,ˉP)=f(ˆPk−ˉP). |
Since the operator is stable, i.e.,
Under any initial condition
| ˜P1=M∑s=1rJsg(0∣Js)≤P1=M∑s=1rJsg(P0∣Js)≤ˆP1=M∑s=1rJsg(ˆP0∣Js) |
and similarly the sequences under these three initial conditions satisfy that
Lemma 1 gives a necessary and sufficient condition for the convergence of the algebraic Riccati equation (21). By using Lemma 1, we can obtain the following probability conditions making the estimation error unstable.
Proposition 2: For system (1) and sensor networks under Assumptions 1–4, fix the possible attacked node set as
Proof :
Sufficiency: Define the node set
| E{P−k+1∣P−k}≥rJ1(A−FJ1,kCJ1)P−k(A−FJ1,kCJ1)T+Q |
where
Necessity: Since the operator
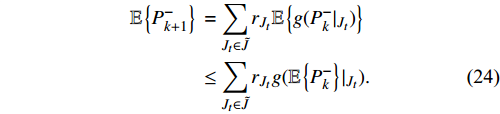
| E{P−k+1}=∑Jt∈˜JrJtE{g(P−k∣Jt)}≤∑Jt∈˜JrJtg(E{P−k}∣Jt). | (24) |
From Lemma 1 and the inequality (24), if
Remark 3: Proposition 2 provides a necessary condition and a sufficient condition on the packet loss probabilities
In this subsection, we consider a special case and give explicit probability conditions to solve Problem 1.
Assumption 5: The system state consists of
| xk+1=[A1⋱Ar]xk+vk | (25) |
where
Because the network is collaboratively observable, the absence of some key measurements will destroy the observability of the whole network. If we attack all the sensors of one type, the network will be intermittently unobservable, which may make it difficult to obtain a uniformly bounded mean square estimation error. Based on this idea, we can give the explicit minimum number of attackers.
Proposition 3: For system (25) and networks satisfying Assumptions 2–5, the minimum number of attacked communication channels is
Proof: The proof is similar to that of Proposition 1. When
From the proof of Proposition 3, to minimize the attack power, it is better to place the attacks to the nodes of the same type. In the following, we will give an explicit sufficient condition and necessary condition on the packet loss probabilities to solve Problem 1.
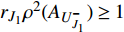
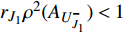
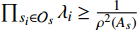
Proposition 4: For system (25) and networks satisfying Assumptions 2–5, the attacker can successfully destroy the estimation of the center, if there exists a system mode
| ∏si∈Osλi≥1ρ2(As) | (26) |
and only if there exists a system mode
| ∏si∈Osλi≥1∏|λu(As)|2 | (27) |
where
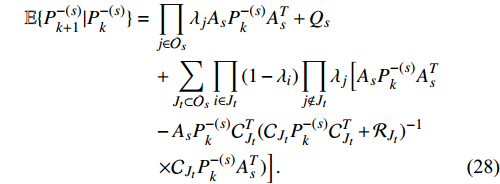
Proof: For system (25), the equation of the covariance can also be decoupled. Assume the attacked node set is
| E{P−(s)k+1|P−(s)k}=∏j∈OsλjAsP−(s)kATs+Qs+∑Jt⊂Os∏i∈Jt(1−λi)∏j∉Jtλj[AsP−(s)kATs−AsP−(s)kCTJt(CJtP−(s)kCTJt+RJt)−1×CJtP−(s)kATs)]. | (28) |
Sufficiency: From (28) we have that
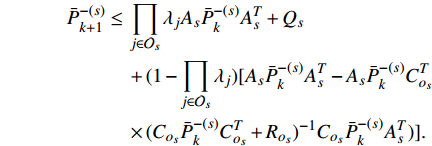
Necessity: Define
| ˉP−(s)k+1≤∏j∈OsλjAsˉP−(s)kATs+Qs+(1−∏j∈Osλj)[AsˉP−(s)kATs−AsˉP−(s)kCTos×(CosˉP−(s)kCTos+Ros)−1CosˉP−(s)kATs)]. |
where
From [31] and [32], if
Remark 4: For all nodes in
In this section, an attack node set
In the above section, we have solved the first two steps of the stepwise solution to Problem 1. In this section, the third step, which aims at finding the minimum of
From Section II-B, the probability of the packet loss on the channel is positively correlated with the attack power. We use a function
Provided that the placement of attacks
Replacing
Problem 2:
| min∑si∈V∗λiδaiψ(δai) | (29) |
| s.t.0≤λiψ(δai)≤1 | (30) |
| δa1≥0,…,δam≥0 | (31) |
| (λ1,…,λm)∈Λ | (32) |
where the attack sensor set
The packet loss probability
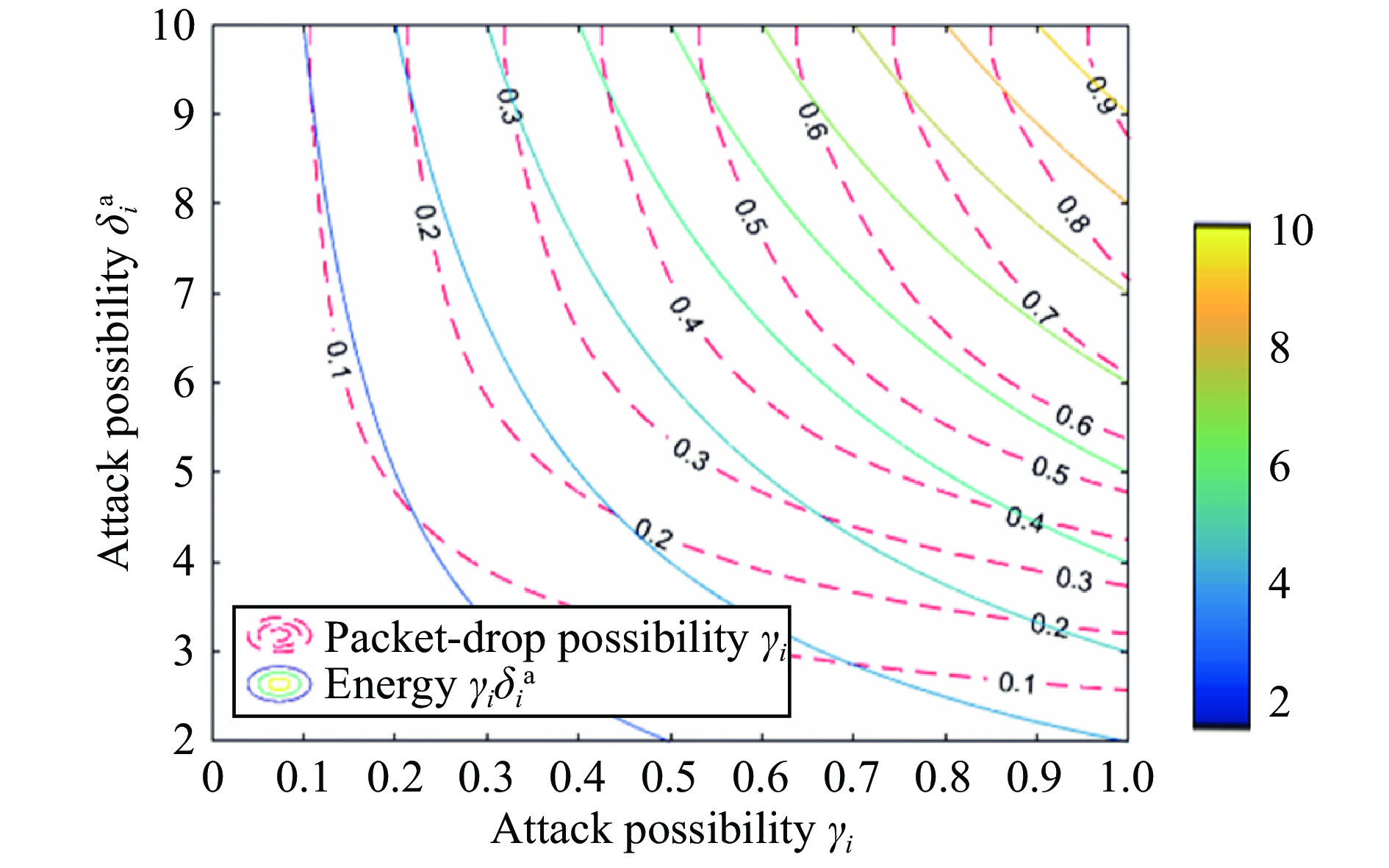
Remark 5: To solve Problem 2, we can look for parameters to minimize
By solving Problem 2, the original nonlinear programming problem with high complexity and high coupling is simplified to a linear programming problem with largely reduced difficulties. Moreover, in Problem 1 two optimal coupled attack parameters for each channel should be searched while in Problem 2, just one parameter
We firstly verify the effectiveness of the allocation mechanism for general systems. In this part, we consider a military gas turbine engine as the target model. In order to evaluate and monitor the state information of the engine, an on-board engine monitoring system [33] is used.
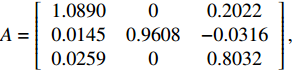
Three incompletely observable sensors send information to process center and the network parameters in (7) and (8) are given as
| x(k+1)=[0.867300.20220.01450.9608−0.03160.025900.8032]x(k)+[0.01650.0789−0.0177]vk. |
The measurement matrices of sensors are
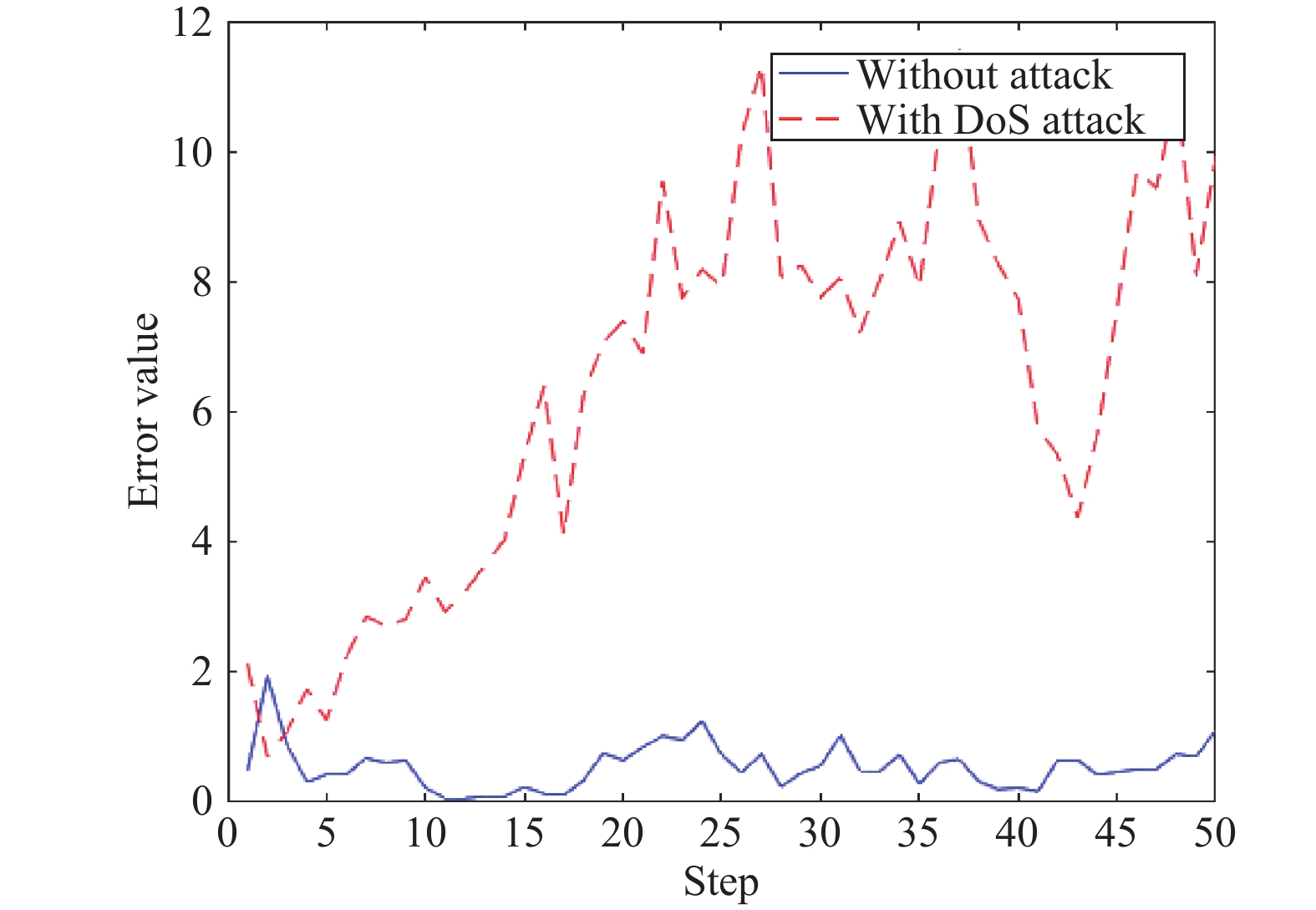
When the system has an unstable eigenvalue, the same attack results in more lethal effect. When
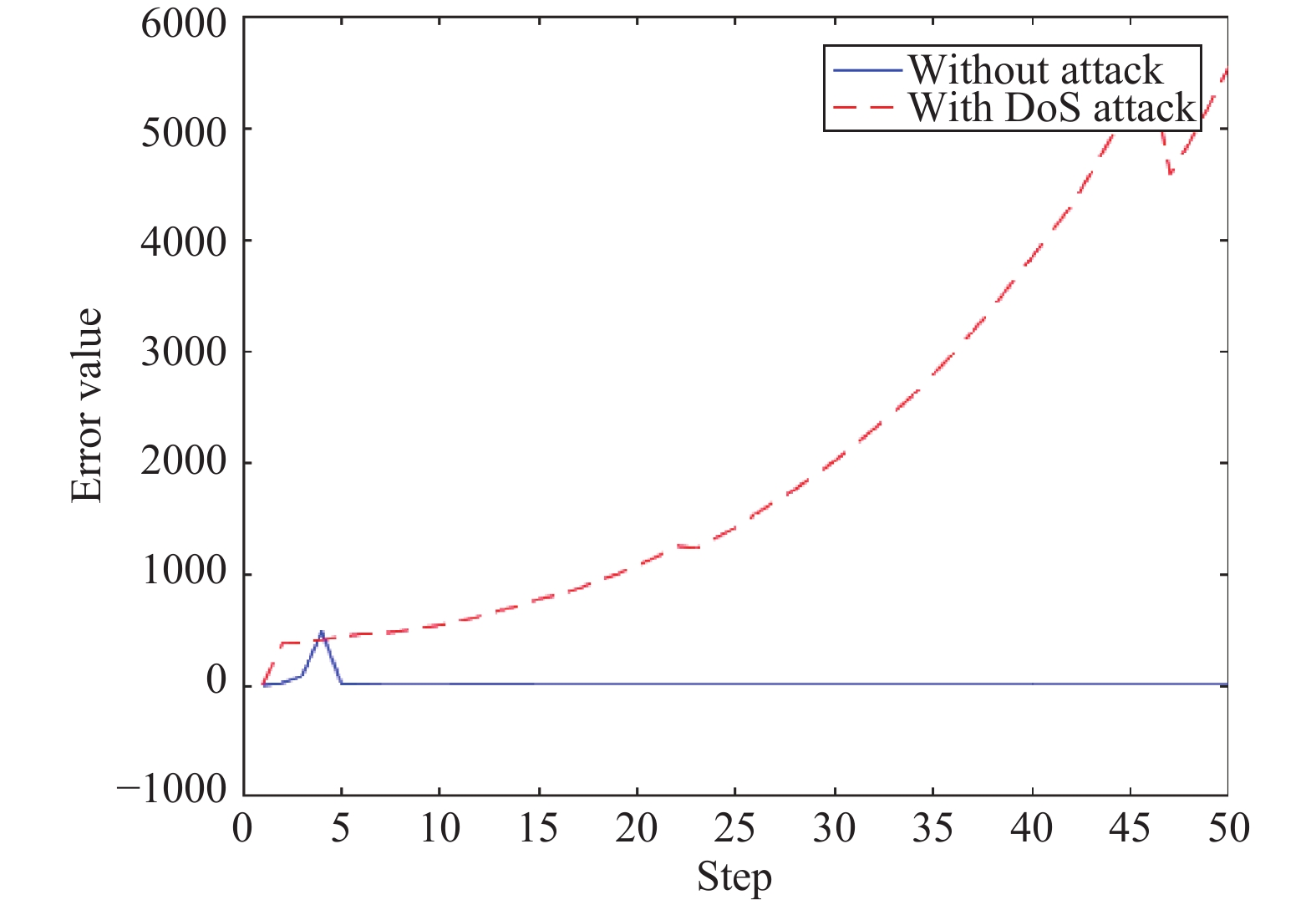
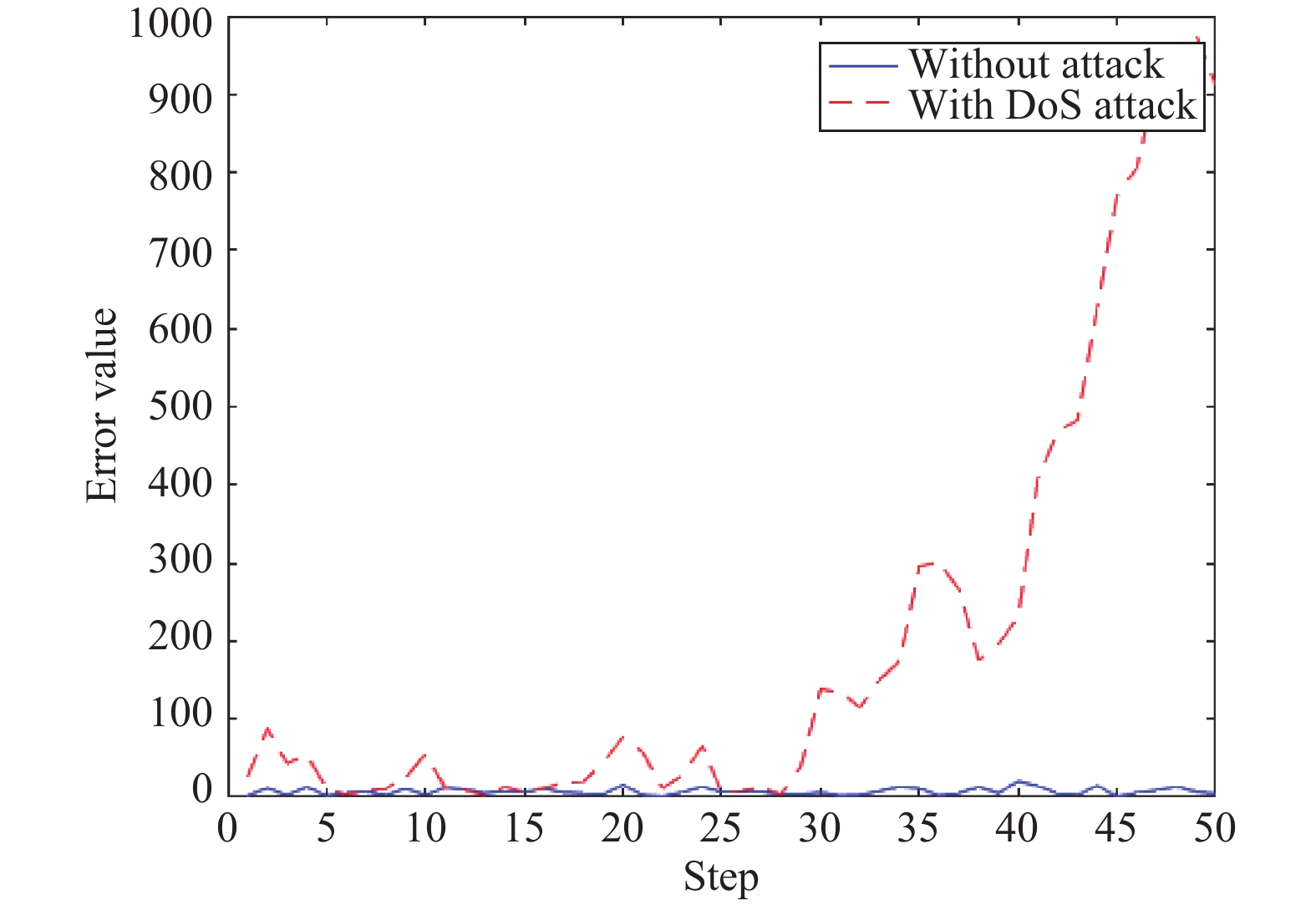
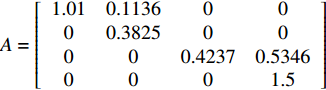
In this subsection, we consider a system with diagonal form and there are 4 incompletely observable sensors sending information to the process center through communication channels, where the monitoring process of the smart grid is studied. In the smart grid, some separate self-generating areas can be regarded as independent power agents ([21]). The system is
The system has two diagonal blocks, thus we easily get
From Proposition 4, we obtain the optimal packet loss probability
In this paper, a suboptimal stochastic DoS attack mechanism is designed to destroy the centralized state estimation in wireless sensor networks, which makes the estimation error of the system unbounded with minimum energy consumption. The mechanism is composed of three steps, where the attack node set, the feasible induced packet loss probability set, and the attack probabilities and power are proposed in sequence. This paper focuses on attack management in centralized estimation networks. How to place attacks in distributed estimation networks and delayed networks is of our research interest in future.
| [1] |
X. M. Zhang, Q. L. Han, X. H. Ge, D. R. Ding, L. Ding, D. Yue, and C. Peng, “Networked control systems: A survey of trends and techniques,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 1–17, Jan. 2020. doi: 10.1109/JAS.2019.1911861
|
| [2] |
S. L. Sun and Z. L. Deng, “Multi-sensor optimal information fusion Kalman filter,” Automatica, vol. 40, no. 6, pp. 1017–1023, Jun. 2004. doi: 10.1016/j.automatica.2004.01.014
|
| [3] |
I. Bahceci and A. K. Khandani, “Linear estimation of correlated data in wireless sensor networks with optimum power allocation and analog modulation,” IEEE Trans. Commun., vol. 56, no. 7, pp. 1146–1156, Jul. 2008.
|
| [4] |
Y. L. Mo, R. Ambrosino, and B. Sinopoli, “Sensor selection strategies for state estimation in energy constrained wireless sensor networks,” Automatica, vol. 47, no. 7, pp. 1330–1338, Jul. 2011. doi: 10.1016/j.automatica.2011.02.001
|
| [5] |
G. Battistelli, L. Chisci, G. Mugnai, A. Farina, and A. Graziano, “Consensus-based linear and nonlinear filtering,” IEEE Trans. Autom. Control, vol. 60, no. 5, pp. 1410–1415, May 2015. doi: 10.1109/TAC.2014.2357135
|
| [6] |
X. X. Guo, A. S. Leong, and S. Dey, “Estimation in wireless sensor networks with security constraints,” IEEE Trans. Aerosp. Electron. Syst., vol. 53, no. 2, pp. 544–561, Apr. 2017. doi: 10.1109/TAES.2017.2649178
|
| [7] |
Y. Zhang and Y. P. Tian, “A fully distributed weight design approach to consensus Kalman filtering for sensor networks,” Automatica, vol. 104, pp. 34–40, Jun. 2019. doi: 10.1016/j.automatica.2019.02.052
|
| [8] |
Y. L. Zou, J. Zhu, X. B. Wang, and L. Hanzo, “A survey on wireless security: Technical challenges, recent advances, and future trends,” Proc. IEEE, vol. 104, no. 9, pp. 1727–1765, Sep. 2016. doi: 10.1109/JPROC.2016.2558521
|
| [9] |
S. Amin, A. A. Cárdenas, and S. S. Sastry, “Safe and secure networked control systems under denial-of-service attacks,” in Hybrid Systems: Computation and Control, R. Majumdar and P. Tabuada, Eds. Heidelberg, Germany: Springer, 2009, pp. 31-45.
|
| [10] |
D. Zhang, L. Liu, and G. Feng, “Consensus of heterogeneous linear multiagent systems subject to aperiodic sampled-data and DoS attack,” IEEE Trans. Cybern., vol. 49, no. 4, pp. 1501–1511, Apr. 2019. doi: 10.1109/TCYB.2018.2806387
|
| [11] |
J. Milosevic, T. Tanaka, H. Sandberg, and K. H. Johansson, “Analysis and mitigation of bias injection attacks against a Kalman filter,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 8393–8398, Jul. 2017. doi: 10.1016/j.ifacol.2017.08.1564
|
| [12] |
D. W. Shi, R. J. Elliott, and T. W. Chen, “On finite-state stochastic modeling and secure estimation of cyber-physical systems,” IEEE Trans. Autom. Control, vol. 62, no. 1, pp. 65–80, Jan. 2017. doi: 10.1109/TAC.2016.2541919
|
| [13] |
B. Chen, D. W. C. Ho, G. Q. Hu, and L. Yu, “Secure fusion estimation for bandwidth constrained cyber-physical systems under replay attacks,” IEEE Trans. Cybern., vol. 48, no. 6, pp. 1862–1876, Jun. 2018. doi: 10.1109/TCYB.2017.2716115
|
| [14] |
B. Chen, D. W. C. Ho, W. A. Zhang, and L. Yu, “Distributed dimensionality reduction fusion estimation for cyber-physical systems under DoS attacks,” IEEE Trans. Syst.,Man,Cybern.:Syst., vol. 49, no. 2, pp. 455–468, Feb. 2019. doi: 10.1109/TSMC.2017.2697450
|
| [15] |
Q. Y. Liu, Z. D. Wang, X. He, and D. H. Zhou, “Event-based recursive distributed filtering over wireless sensor networks,” IEEE Trans. Autom. Control, vol. 60, no. 9, pp. 2470–2475, Sep. 2015. doi: 10.1109/TAC.2015.2390554
|
| [16] |
W. Yang, L. Lei, and C. Yang, “Event-based distributed state estimation under deception attack,” Neurocomputing, vol. 270, pp. 145–151, Dec. 2017. doi: 10.1016/j.neucom.2016.12.109
|
| [17] |
A. S. Leong, S. Dey, and D. E. Quevedo, “Transmission scheduling for remote state estimation and control with an energy harvesting sensor,” Automatica, vol. 91, pp. 54–60, May 2018. doi: 10.1016/j.automatica.2018.01.027
|
| [18] |
F. X. Wen and Z. M. Wang, “Distributed Kalman filtering for robust state estimation over wireless sensor networks under malicious cyber attacks,” Digit. Signal Process., vol. 78, pp. 92–97, Jul. 2018. doi: 10.1016/j.dsp.2018.03.002
|
| [19] |
Y. P. Guan and X. H. Ge, “Distributed secure estimation over wireless sensor networks against random multichannel jamming attacks,” IEEE Access, vol. 5, pp. 10858–10870, Jun. 2017. doi: 10.1109/ACCESS.2017.2713807
|
| [20] |
X. H. Ge, Q. L. Han, M. Y. Zhong, and X. M. Zhang, “Distributed Krein space-based attack detection over sensor networks under deception attacks,” Automatica, vol. 109, pp. 108557, Nov. 2019. doi: 10.1016/j.automatica.2019.108557
|
| [21] |
S. Y. Xiao, Q. L. Han, X. H. Ge, and Y. J. Zhang, “Secure distributed finite-time filtering for positive systems over sensor networks under deception attacks,” IEEE Trans. Cybern., vol. 50, no. 3, pp. 1220–1229, Mar. 2020. doi: 10.1109/TCYB.2019.2900478
|
| [22] |
D. J. Du, X. Li, W. T. Li, R. Chen, M. R. Fei, and L. Wu, “ADMM-based distributed state estimation of smart grid under data deception and denial of service attacks,” IEEE Trans. Syst.,Man,Cybern.:Syst., vol. 49, no. 8, pp. 1698–1711, Aug. 2019. doi: 10.1109/TSMC.2019.2896292
|
| [23] |
J. H. Qin, M. L. Li, L. Shi, and X. H. Yu, “Optimal denial-of-service attack scheduling with energy constraint over packet-dropping networks,” IEEE Trans. Autom. Control, vol. 63, no. 6, pp. 1648–1663, Jun. 2018. doi: 10.1109/TAC.2017.2756259
|
| [24] |
K. M. Ding, Y. Z. Li, D. E. Quevedo, S. Dey, and L. Shi, “A multi-channel transmission schedule for remote state estimation under DoS attacks,” Automatica, vol. 78, pp. 194–201, Apr. 2017. doi: 10.1016/j.automatica.2016.12.020
|
| [25] |
X. H. Cao and C. Y. Sun, “Probabilistic denial of service attack against remote state estimation over a Markov channel in cyber-physical systems,” in Proc. 11th Asian Control Conf., Gold Coast, Australia, 2017, 17–20.
|
| [26] |
Y. Z. Li, L. Shi, P. Cheng, J. M. Chen, and D. E. Quevedo, “Jamming attacks on remote state estimation in cyber-physical systems: A game-theoretic approach,” IEEE Trans. Autom. Control, vol. 60, no. 10, pp. 2831–2836, Oct. 2015. doi: 10.1109/TAC.2015.2461851
|
| [27] |
H. Zhang, P. Cheng, L. Shi, and J. M. Chen, “Optimal Denial-of-Service attack scheduling with energy constraint,” IEEE Trans. Autom. Control, vol. 60, no. 11, pp. 3023–3028, Nov. 2015. doi: 10.1109/TAC.2015.2409905
|
| [28] |
H. Zhang, Y. F. Qi, J. F. Wu, L. K. Fu, and L. D. He, “DoS attack energy management against remote state estimation,” IEEE Trans. Control Netw. Syst., vol. 5, no. 1, pp. 383–394, Mar. 2018. doi: 10.1109/TCNS.2016.2614099
|
| [29] |
C. Yang, W. Yang, and H. B. Shi, “DoS attack in centralised sensor network against state estimation,” IET Control Theory Appl., vol. 12, no. 9, pp. 1244–1253, Jun. 2018. doi: 10.1049/iet-cta.2017.0819
|
| [30] |
R. A. Poisel, Modern Communications Jamming: Principles and Techniques. Norwood, USA: Artech House, 2011.
|
| [31] |
B. Sinopoli, L. Schenato, M. Franceschetti, K. Poolla, M. I. Jordan, and S. S. Sastry, “Kalman filtering with intermittent observations,” IEEE Trans. Autom. Control, vol. 49, no. 9, pp. 1453–1464, Sep. 2004. doi: 10.1109/TAC.2004.834121
|
| [32] |
L. Schenato, B. Sinopoli, M. Franceschetti, K. Poolla, and S. S. Sastry, “Foundations of control and estimation over lossy networks,” Proc. IEEE, vol. 95, no. 1, pp. 163–187, Jan. 2007. doi: 10.1109/JPROC.2006.887306
|
| [33] |
R. W. Eustace, B. A. Woodyatt, G. L. Merrington, and A. Runacres, “Fault signatures obtained from fault implant tests on an F404 engine,” J. Eng. Gas Turbines Power, vol. 116, no. 1, pp. 178–183, Jan. 1994. doi: 10.1115/1.2906789
|

Figures(5)




Ya Zhang, Lishuang Du and Frank L. Lewis, "Stochastic DoS Attack Allocation Against Collaborative Estimation in Sensor Networks," IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1225-1234, Sept. 2020. doi: 10.1109/JAS.2020.1003285
 DownLoad:
DownLoad:




































































































































































































































































































 DownLoad:
DownLoad:



