














































































































































































































































































Figure
1.
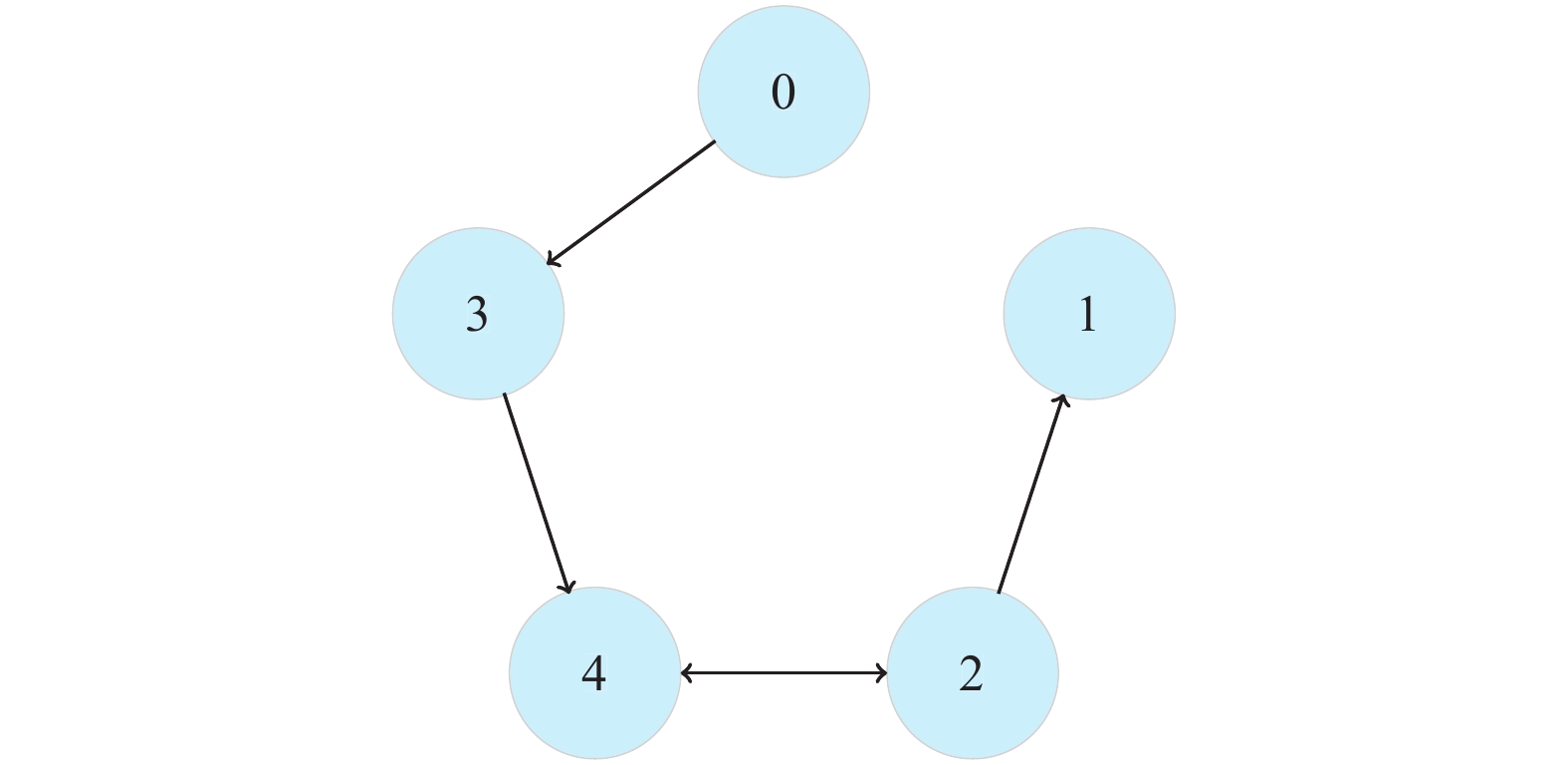
The network topology.
 Volume 7
Issue 4
Volume 7
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | Chao Deng, Weinan Gao and Weiwei Che, "Distributed Adaptive Fault-Tolerant Output Regulation of Heterogeneous Multi-Agent Systems With Coupling Uncertainties and Actuator Faults," IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1098-1106, July 2020. doi: 10.1109/JAS.2020.1003258

|
THE application of multi-agent systems (MASs) [1]–[6] is wide, including smart grid systems [1], intelligent transportation systems [2] and multi-robot systems [3]. In the last decade, rapid development has achieved in MASs. The cooperative output regulation (COR), one of the important research topics on MASs, has received considerable attention. The control objective of COR is to design the control protocol of subsystems to achieve the disturbance rejection and trajectory tracking for each of them. Some effective COR methods have been designed for linear heterogeneous MASs to achieve its control objective [7]–[13]. In particular, a distributed control approach is proposed in [7] to solve the robust output regulation problem. In [8], the authors develop a new robust COR method by relaxing the assumption that circles are allowed in the network topology. In [9], the adaptive distributed observer approach is proposed to solve the COR problem assuming that the neighbours of the exosystem know the system matrix of the exosystem. In [10], a novel data-driven solution is given to solve the COR problem under switching network topology.
Practically, actuator faults often occur owing to the long-running operation of the systems. The presence of actuator faults deteriorate the performance or even destabilize the system [14]–[16]. For the sake of reliability and safety, some valuable distributed fault-tolerant control methods have been proposed to compensate for the influence of actuator faults. In [17], an effective distributed fault estimator is designed for MASs under the directed network topology. In [18], the authors concern with the output tracking consensus for a class of pure-feedback nonlinear MASs with actuator failures. In [19], the fixed-time fault-tolerant controller is designed for second-order nonlinear MASs. In [20], a distributed adaptive fuzzy fault-tolerant controller is proposed for the high-order nonlinear MASs with actuator bias faults. A distributed adaptive event-triggered fault-tolerant method is designed in [21] to reduce the communication burden among the communication networks. In [22], the authors design a circuit implementation method for the developed fault-tolerant consensus controller and apply to a multiple coupled nonlinear forced pendulum system. However, it is still difficult to solve the cooperative fault-tolerant output regulation problem directly through the existing methods. The major challenges are: 1) to find an effective way to ensure the COR problem is solvable under the influenced of actuator faults; 2) how to present a fault-tolerant controller to compensate for actuator faults. In [23], a sufficient condition is established to ensure that the regulator equations are solvable and then a distributed fault-tolerant controller is designed. In [24], the authors solve the COR for linear heterogeneous MASs under the influence of denial-of-service attacks and actuator faults. However, only nominal and certain MASs are considered in the aforementioned results.
Another practical issue on MASs controller design is to address the effect of uncertainties, including both system uncertainty and coupling uncertainty. In [25], the COR problems of MASs with coupling uncertainties among subsystems are studied. However, only the matched coupling uncertainties are considered. It is well known that mismatched coupling uncertainties are more general in practical applications. Moreover, the existing cyclic-small-gain theorem method in [25] cannot be directly used to settle this problem. Therefore, to develop a fault-tolerant and robust distributed control method for heterogeneous MASs with system uncertainties and mismatched coupling uncertainties to resist the influence of actuator faults is an open and interesting problem.
In this paper, we will solve the distributed adaptive fault-tolerant output regulation problem for heterogeneous MASs with system uncertainty and mismatched coupling uncertainties under the influence of actuator faults. Compared with existing results, the contributions are threefold.
1) A novel distributed adaptive fault-tolerant control method is proposed to solve the fault-tolerant output regulation problem for heterogeneous MASs with matched system uncertainties and mismatched coupling uncertainties among subsystems. To the best of our knowledge, this paper is the first attempt to integrate cyclic-small-gain techniques, COR theory and distributed fault-tolerant method.
2) Different from the existing distributed fault-tolerant control result [23], a more general directed network topology is considered in this paper. To observe the state of the exosystem, novel distributed finite-time observers are designed. In particular, a new variable is introduced in observers to identify which subsystem accurately estimates the state of the exosystem. Besides, we develop a novel distributed fault-tolerant control method that is able to handle unknown matched and bounded uncertainties. Besides, it is shown that all subsystems can achieve trajectory tracking while rejecting nonvanishing disturbances.
3) Different from our previous work [25], in which only the matched coupling uncertainties are considered, the more general unmatched coupling uncertainties are considered in this paper. To deal with it, a novel sufficient condition with cyclic-small-gain condition is proposed by using the linear matrix inequality technique.
Notations: For vectors
Consider the heterogeneous uncertain MASs generalized from [25]
| ˙v(t)=Sv(t) | (1) |
| ˙xi(t)=(Ai+ΔAi)xi(t)+Biui(t)+HiΦi(e,v)+Eiv(t) | (2) |
| ei(t)=Cixi(t)+Fiv(t),i=1,…,N | (3) |
where
We introduce the following assumptions.
Assumption 1:
Assumption 2: There exist solution matrices
| {XiS−AiXi−Ei=BiUiCiXi+Fi=0,i=1,…,N. | (4) |
Remark 1: As discussed in [9] and [26], Assumptions 1 and 2 are necessary to ensure that the COR problem is solvable.
In this paper, we consider a directed graph
Assumption 3: The directed graph
Similar to [27], this paper considers the following actuator faults.
| uFhij(t)=ρhijuij(t)+ωhij(t) | (5) |
where
We can summarize the model (5) as follows: 1)
Denote
| uFhi(t)=Λhiui(t)+ωhi(t) |
where
| uFi(t)=Λiui(t)+ωi(t) | (6) |
where
Assumption 4: The uncertain parameter
Assumption 5: rank
Lemma 1 [27]:
If Assumption 5 holds, there exists positive constants
| BiΛiBTi≥μiBiBTi,i=1,2,…,N. |
Lemma 2 [23]:
If Assumptions 1, 2 and 5 are satisfied, then there exist matrices
| {XiS−AiXi−Ei=BiΛiUΛiiCiXi+Fi=0,i=1,…,N. | (7) |
Lemma 3 [28]: Consider the system:
| ˙z1=z2⋮˙zr−1=zr˙zr=u. |
Let
| u=−l1sign(z1)|z1|κ1−⋯−lrsign(zr)|zr|κr |
where
| κi=κi+1κi+22κi+2−κi+1,i=r−1,…,1 |
with
Remark 2: Assumption 4 has been used in some existing fault-tolerant control results [23] and [27]. From Lemma 4 in [23], we know that a sufficient condition, which ensures that the cooperative fault-tolerant output regulation problem is solvable, is that Assumption 4 holds.
The control objective is to propose a distributed adaptive robust fault-tolerant control method for MASs (1)–(3) with system uncertainties and mismatched coupling uncertainties among subsystems under the influence of actuator faults (6) such that
1) The regulated outputs satisfy
2) The closed-loop MASs are asymptotically stable when
Remark 3: Different from the existing cooperative fault-tolerant results [18] and [19], the dynamics of the MASs considered in this paper contain nonvanishing signal
In order to estimate the state of exosystem (1), we design the distributed finite-time observers for subsystems
| ˙ηi={0,ift<tiˉSηi(t)+ˉTνi(t),else | (8) |
where
| ti=minj∈Ni{tij} | (9) |
with
| tij=argmint∈R,j∈Ni‖vj(t)‖≠0 | (10) |
| νij(t)=−r∑k=1αjkζik(t)−pj∑k=1βkijsign(ζkij(t))|ζkij(t)|θkij | (11) |
where parameters
| ˙ζi(t)=ˉSζi(t)−cˉTˉTTRφi(t)−ιsign(Rφi(t))+ˉTνi(t) | (12) |
where
| cij(t)={1,ifj=ij0andt≥ti0,else | (13) |
with
| ij0=argmin{tij}j∈Ni | (14) |
One can have the following Lemma 4 to ensure the finite-time estimation.
Lemma 4: Choose
| θkij=θk+1ijθk+2ij2θk+2ij−θk+1ij,k=pj−1,…,1,j=1,…,r |
with
Proof: See Appendix. ■
Remark 4: Different from the existing finite-time observers in [23], the developed distributed finite-time observers can deal with more general directed network topology, which contains the undirected network topology as a special case. Interestingly, a new variable is introduced in the observers to identify which subsystem accurately estimates the state of the exosystem.
Remark 5: In the distributed finite-time observers (8), the matrix
Remark 6: Different from [30], in which the distributed cooperative filters are designed for MASs to estimate the state, the objective of designing distributed finite-time observers is to estimate the trajectories of the exosystem. Based on the developed observers, the fault-tolerant controller will be designed in next subsection to eliminate the influence of the nonvanishing signal
Incorporating finite-time observers (8), the fault-tolerant controller is designed as follows
| ui(t)=ui1(t)+ui2(t)+ui3(t) | (15) |
where
| ui1(t)=ˆKi(t)ˉxi(t)+ˆUi(t)vi(t) | (16) |
| ui2(t)=−BTiPiˉxi(t)ˆw2i(t)||ˉxTi(t)PiBi||ˆwi(t)+e−t | (17) |
| ui3(t)=−ˆg2i(t)BTiPiˉxi(t)||xi||2ˆgi(t)||ˉxTi(t)PiBi||⋅||xi||+e−t | (18) |
| ˙ˆKji(t)=−γij1bTijPiˉxi(t)ˉxTi(t) | (19) |
| ˙ˆUji(t)=−γij2bTijPiˉxi(t)vTi(t) | (20) |
where
| ˙ˆwi(t)=γi||ˉxTi(t)PiBi|| | (21) |
| ˙ˆgi(t)=γgi||ˉxTi(t)PiBi||⋅||xi(t)|| | (22) |
where
| [PiAi+ATiPi−2PiBiBTiPi+(1+1βi)IPiHiHTiPi−1d2iπI]<0 | (23) |
where
Remark 7: Different from the existing cooperative fault-tolerant output regulation result [23], the more general heterogeneous MASs with actuator bias fault
Let
| ˙ˉxi=(Ai+ΔAi)xi+Bi(Λiui(t)+ωi)+HiΦi(e,v)+Eiv−XiSv |
Using
| ˙ˉxi=Aixi+Bi(Λiui+Gixi+ωi)+HiΦi(e,v)+Eiv−XiSv. |
According to the regulator equations (7), it yields
| ˙ˉxi=Aiˉxi−BiΛiUΛiiv+Bi(Λiui+Gixi+ωi)+HiΦi(e,v). |
Define
| ˙ˉxi=ˉAiˉxi−BiΛiKiˉxi−BiΛiUΛiiv+Bi(Λiui+Gixi+ωi)+HiΦi(e,v). | (24) |
Then, a sufficient condition on the COR for the MASs (1)-(3) with actuator faults (6) is presented in the following Theorem.
Theorem 1: For given
| N−1∑j=1j∑1≤i1<i2<⋯<ij+1≤Nβi1βi2⋯βij+1<1. | (25) |
If there exists
Proof: Construct the Lyapunov functional
| V(t)=N∑i=1σiβiVi(t) |
where
| Vi=ˉxTiPiˉxi+m∑j=1ρij(1γij1˜Kji(˜Kji)T+1γij2˜Uji(˜Uji)T)+μiγi˜w2i+μiγgi˜g2i |
and
| σi=N∏j=1,j≠i(1+βj)1−N−1∑j=1j∑1≤i1<i2<⋯<ij+1≤Nβi1βi2⋯βij+1. | (26) |
| ˙Vi=2ˉxTiPi(Aiˉxi−BiΛiUΛiiv+Bi(Λiui+Gixi+ωi)+HiΦi(e,v))+2m∑j=1ρij(1γij1˙˜Kji(˜Kji)T+1γij2˙˜Uji(˜Uji)T)+2μiγi˙˜wi˜wi+2μiγgi˙˜gi˜gi. | (27) |
By using the fault-tolerant controller (15), we further have
| ˙Vi=2ˉxTiPi(ˉAiˉxi+BiΛi(˜Kixi+˜Uivi)+Bi(Gixi+ωi)+HiΦi(e,v))−2ˉxTiPiBiΛiBTiPiˉxiˆw2i||ˉxTiPiBi||ˆwi+e−t+2m∑j=1ρij(1γij1˙˜Kji(˜Kji)T+1γij2˙˜Uji(˜Uji)T)+2μiγi˙˜wi˜wi+2μiγgi˙˜gi˜gi. | (28) |
Using the Young’s inequality, it yields that
| 2ˉxTiPiHiΦi(e,v)≤d2iπˉxTiPiHiHTiPiˉxi+1d2iπΦTi(e,v)Φi(e,v). | (29) |
From
| 1d2iπΦTi(e,v)Φi(e,v)≤1πeTe≤ˉxTˉx | (30) |
where
| ˙Vi≤ˉxTi(PiˉAi+ˉATiPi+d2iπPiHiHTiPi)ˉxi+ˉxTˉx+2ˉxTiPi(BiΛi(˜Kixi+˜Uivi)+Bi(Gixi+ωi))−2ˉxTiPiBiΛiBTiPiˉxiˆw2i||ˉxTiPiBi||ˆwi+e−t+2μiγi˙˜wi˜wi+2m∑j=1ρij(1γij1˙˜Kji(˜Kji)T+1γij2˙˜Uji(˜Uji)T). | (31) |
Using Assumption 4 and the adaptive updated law (21), we have
| 2ˉxTiPiBiωi−2ˉxTiPiBiΛiBTiPiˉxiˆw2i||ˉxTiPiBi||ˆwi+e−t+2μiγi˙˜wi˜wi≤2‖ˉxTiPiBi‖ˉωi−2μi‖ˉxTiPiBi‖2ˆw2i‖ˉxTiPiBi‖ˆwi+e−t+2μiγi˙˜wi˜wi=2μi‖ˉxTiPiBi‖ˆωi−2μi‖ˉxTiPiBi‖2ˆw2i‖ˉxTiPiBi‖ˆwi+e−t=2μie−t‖ˉxTiPiBi‖ˆwi‖ˉxTiPiBi‖ˆwi+e−t≤2μie−t. | (32) |
Using Assumption 4 and the adaptive updated law (22), we have
| 2ˉxTiPiBiGixi−2ˉxTiPiBiΛiBTiPiˉxiˆg2i||xi||2||ˉxTiPiBi||ˆgi||xi||+e−t+2μiγgi˙˜gi˜gi≤2‖ˉxTiPiBi‖ˉgi||xi||−2μi‖ˉxTiPiBi‖2ˆg2i||xi||2‖ˉxTiPiBi‖ˆgi||xi||+e−t+2μiγgi˙˜gi˜gi=2μi‖ˉxTiPiBi‖ˆgi||xi||−2μi‖ˉxTiPiBi‖2ˆg2i||xi||2‖ˉxTiPiBi‖ˆgi||xi||+e−t=2μie−t‖ˉxTiPiBi‖ˆgi||xi||‖ˉxTiPiBi‖ˆgi||xi||+e−t≤2μie−t. | (33) |
Using the adaptive laws (19) and (20), it yields
| 2ˉxTiPi(BiΛi(˜Kixi+˜Uivi)+2m∑j=1ρij(1γij1˙˜Kji(˜Kji)T+1γij2˙˜Uji(˜Uji)T))=2m∑j=1ρij(ˉxTiPibij(˜Kjixi+˜Ujivi)+1γij1˙˜Kji(˜Kji)T+1γij2˙˜Uji(˜Uji)T)=0. | (34) |
Substituting (32) – (34) into (31), we have
| ˙Vi≤ˉxTi(PiˉAi+ˉATiPi+d2iπPiHiHTiPi)ˉxi+ˉxTˉx+4μie−t. | (35) |
From the definition of
| PiˉAi+ˉATiPi=Pi(Ai+BiΛiKi)+(Ai+BiΛiKi)TPi=Pi(Ai−BiΛi1μiBTiPi)+(Ai−BiΛi1μiBTiPi)TPi=PiAi+ATiPi−21μiPiBiΛiBTiPi≤PiAi+ATiPi−2PiBiBTiPi. | (36) |
By applying the Schur complement lemma to (23), we have
| PiAi+ATiPi−2PiBiBTiPi+d2iπPiHiHTiPi+(1+1βi)I<0. | (37) |
Substituting (36) and (37) into (35), we have
| ˙Vi≤−(1+1βi)ˉxTi(t)ˉxi(t)+ˉxTˉx+4μie−t. | (38) |
Hence,
| ˙V(t)≤N∑i=1σiβi(−(1+1βi)ˉxTi(t)ˉxi(t)+ˉxTˉx+4μie−t)=N∑i=1σi(−(βi+1)ˉxTi(t)ˉxi(t)+βiˉxTˉx+4μiβie−t)=N∑i=1σi(−ˉxTi(t)ˉxi(t)+βiN∑j=1,j≠iˉxTj(t)ˉxj(t)+4μiβie−t)=[||x1(t)||2||x2(t)||2⋮||xN(t)||2]T[−1β2…βNβ1−1…βN⋮⋮⋱⋮β1β2…−1][σ1σ2⋮σN]+N∑i=14μiσiβie−t. |
Using the cyclic-small-gain condition (25), we have
| ˙V(t)≤−ˉxTˉx+N∑i=14μiσiβie−t. | (39) |
By using the Barbalat’s lemma in [31], it is deduced that
| limt→∞ei=limt→∞(Cixi+Fiv)=limt→∞Ci(xi−Xiv)+limt→∞(CiX+Fi)v=0. | (40) |
■
Remark 8: Different from our previous work [25], in which only the matched coupling uncertainties are considered, the more general unmatched coupling uncertainties are considered in this paper. The major difficulties met when deriving the current results can be summarized: 1) whether the cooperative fault-tolerant output regulation problem can be solved under the more general unmatched coupling uncertainties? 2) if 1) is solved, then how to obtain a new circle-small-gain condition? To overcome the difficulties, a novel sufficient condition (23) with cyclic-small-gain condition (25) is proposed.
Remark 9: In the inequality condition (23), the Lyapunov matrix
| [AiXi+XiATi−2BiBTiHiXiHTi−1d2iI0Xi0−βi1+βiI]<0. | (41) |
Remark 10: In the fault-tolerant controller (17), when
| ui2={−BTiPiˉxi(t)ˆw2i(t)||ˉxTi(t)PiBi||ˆwi(t)+e−t,ife−t>ε−BTiPiˉxi(t)ˆw2i(t)||ˉxTi(t)PiBi||ˆwi(t)+ε,ife−t≤ε | (42) |
where
In this section, we present an example from [25] to demonstrate the efficiency of the proposed method. The network topology graph
| S=[01−10],Ai=[01−0.2i−0.1i]Bi=Hi=[0i],Ei=[0i00],Ci=[10]TFi=[−10],Φi(e,v)=v13∑j=1ej. |
The considered system uncertainties are chosen as
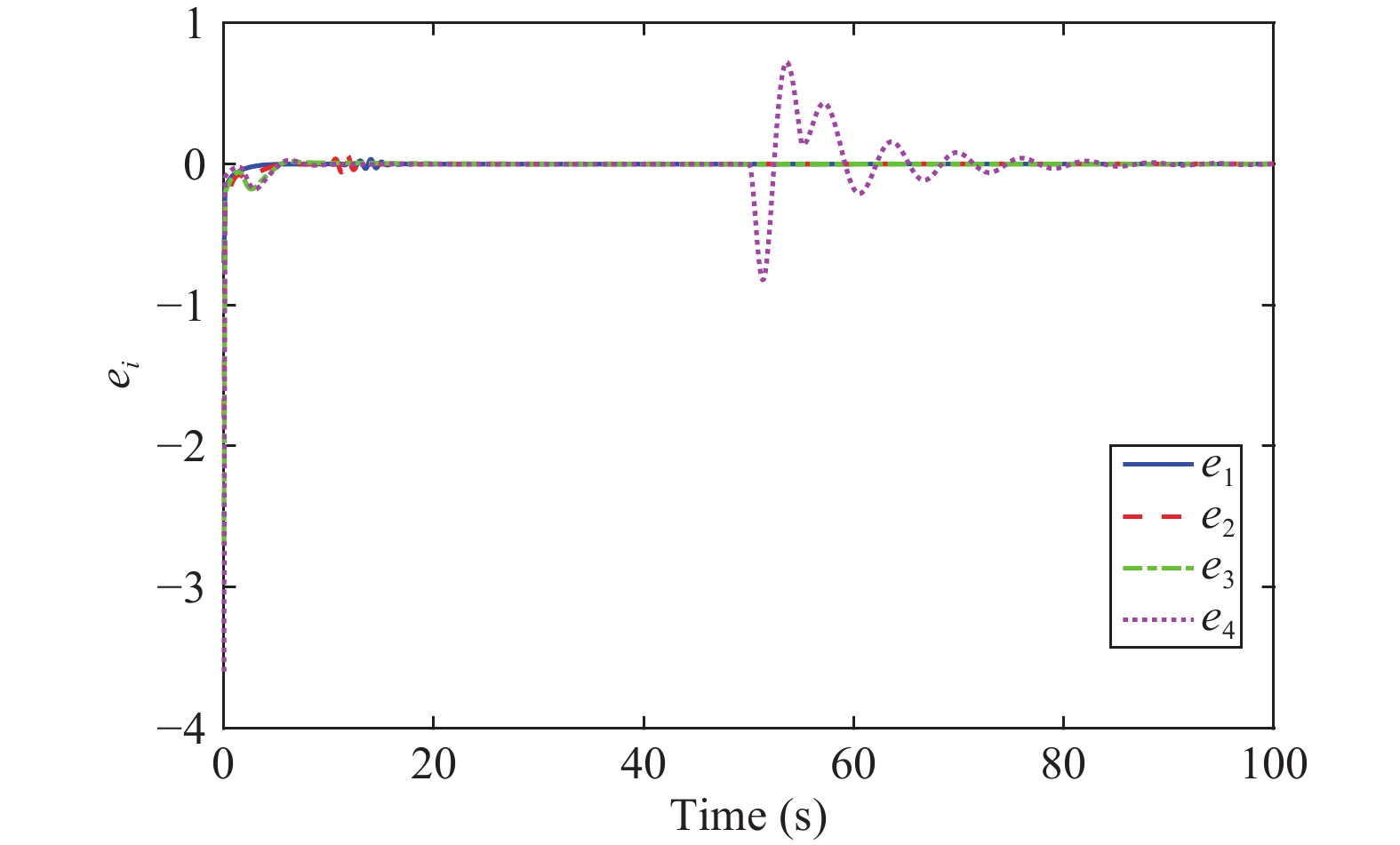
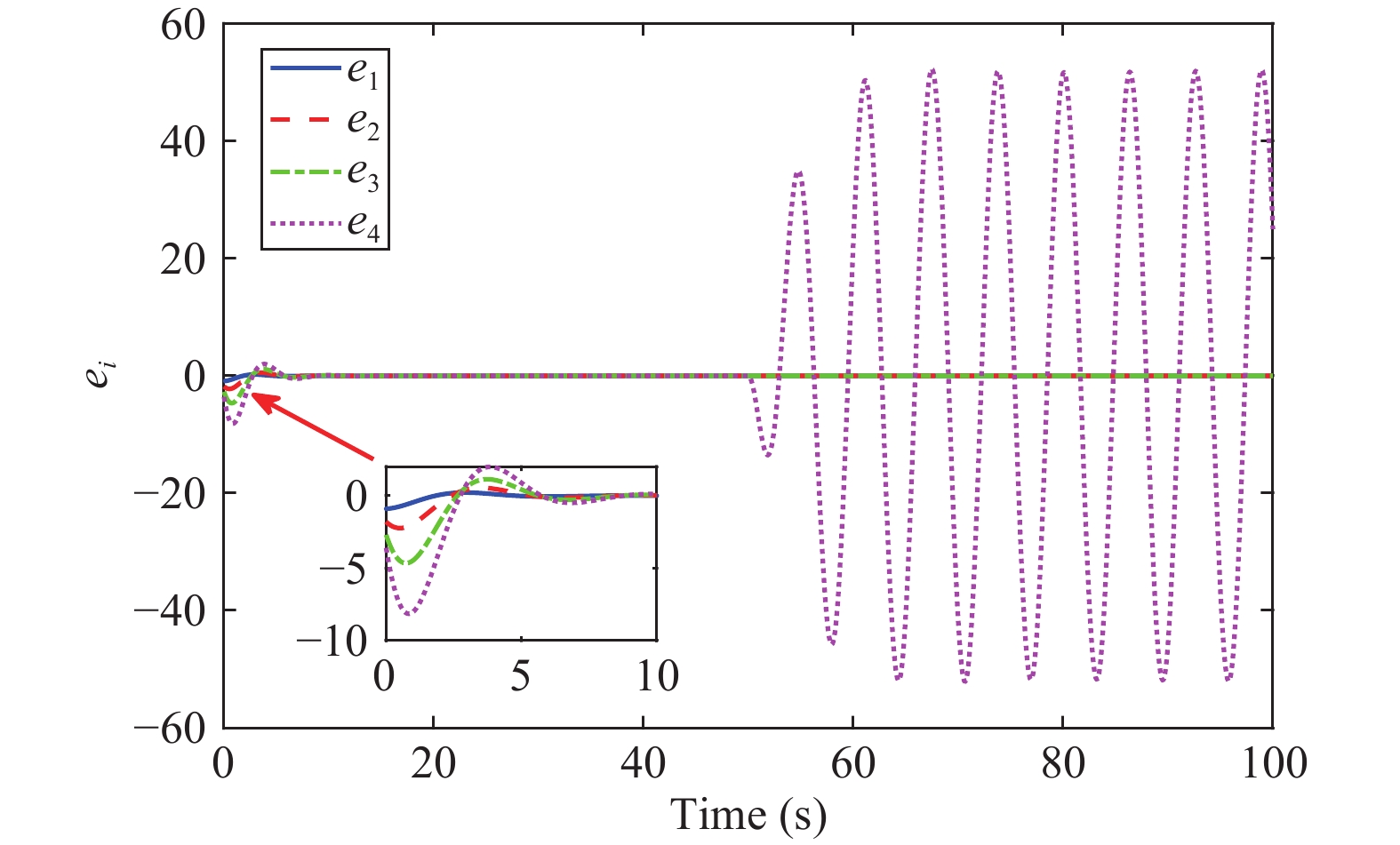
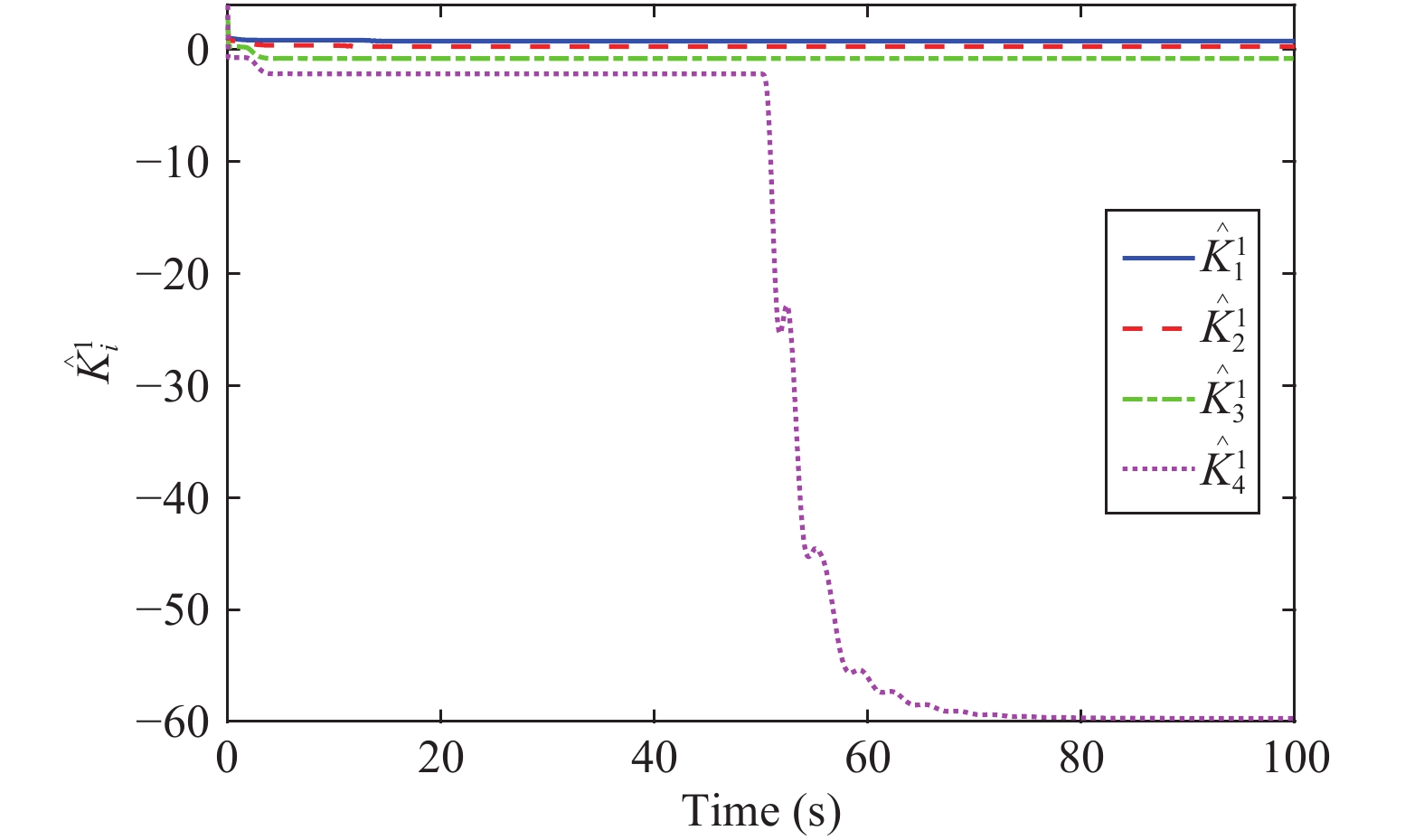
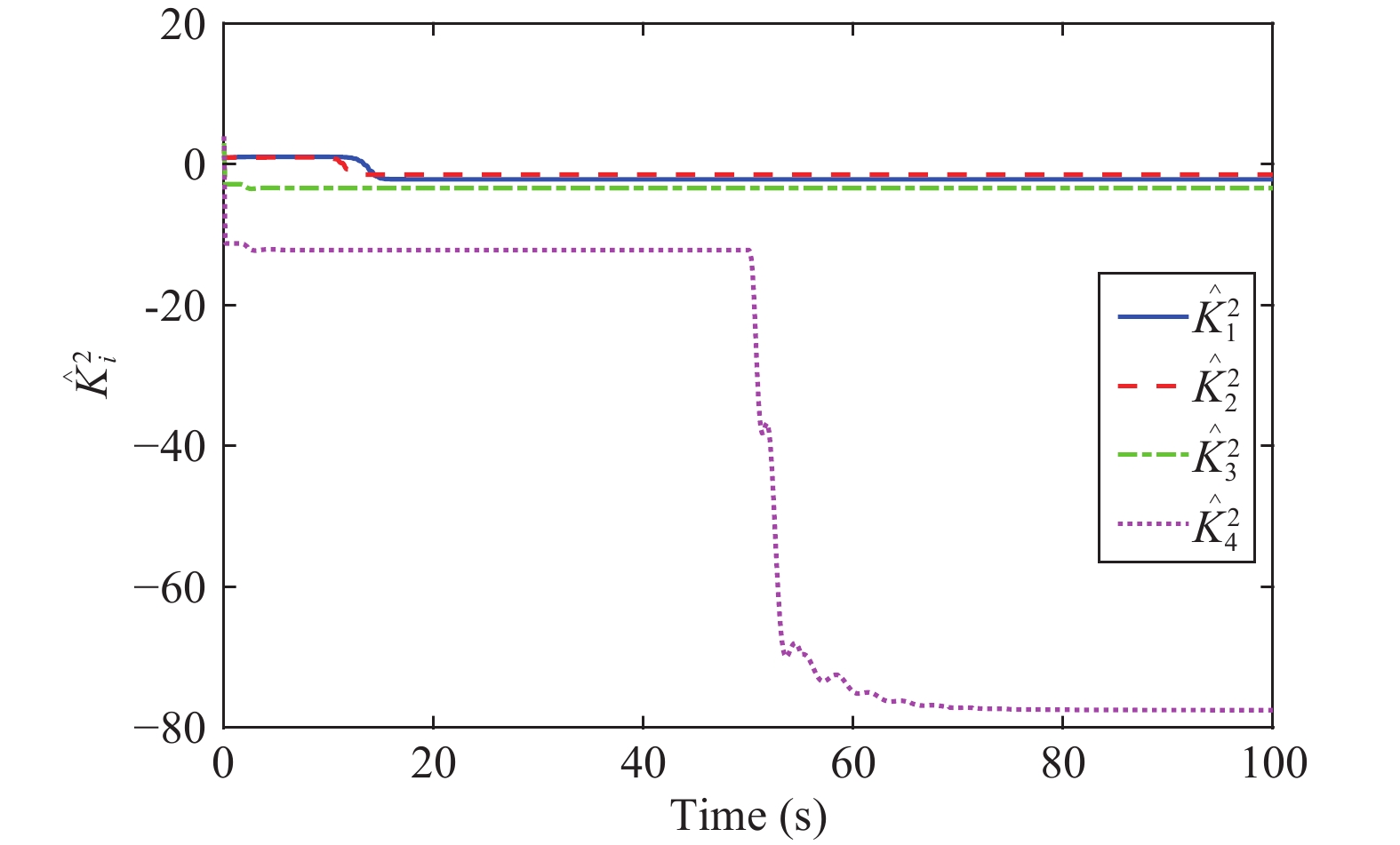
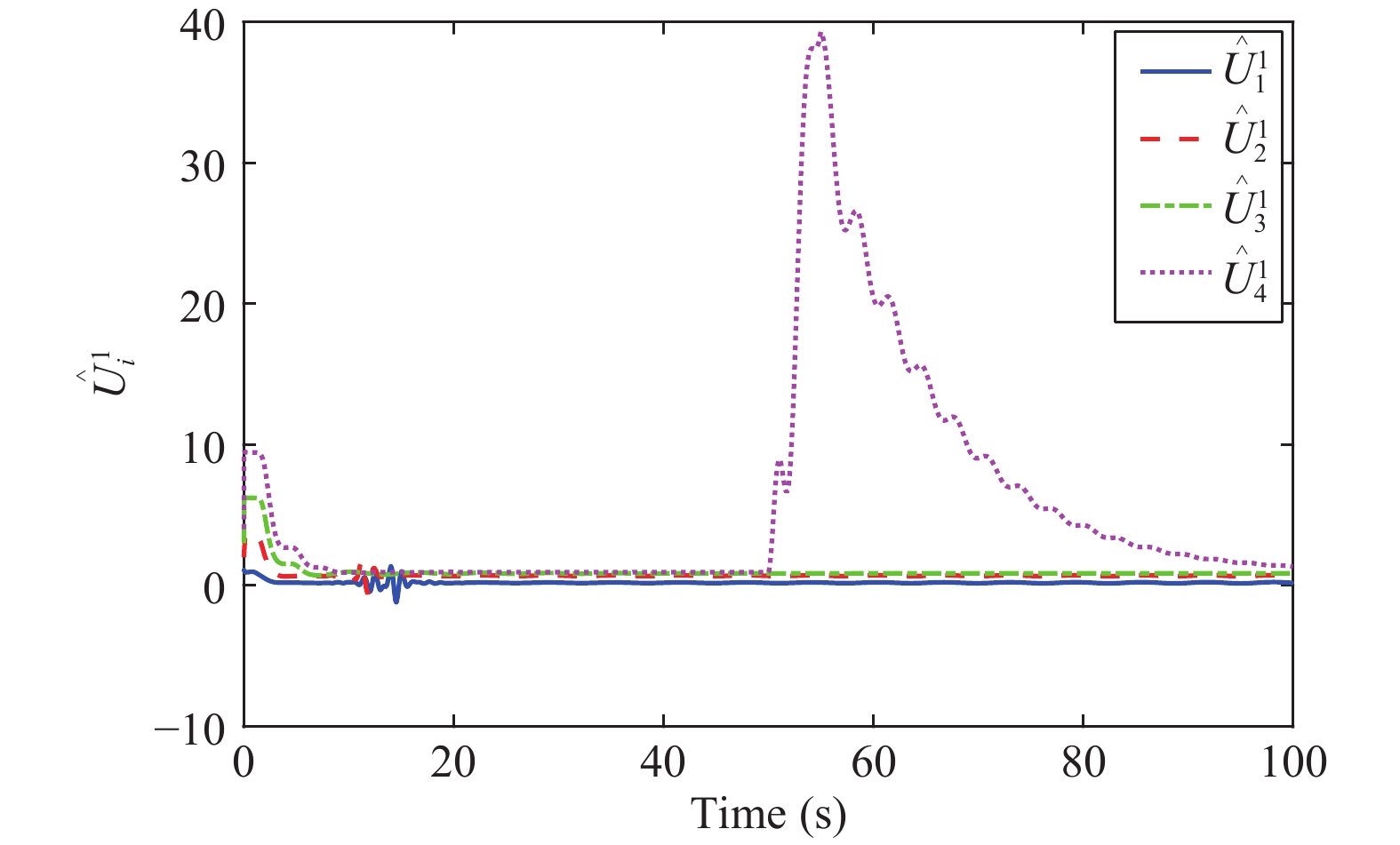
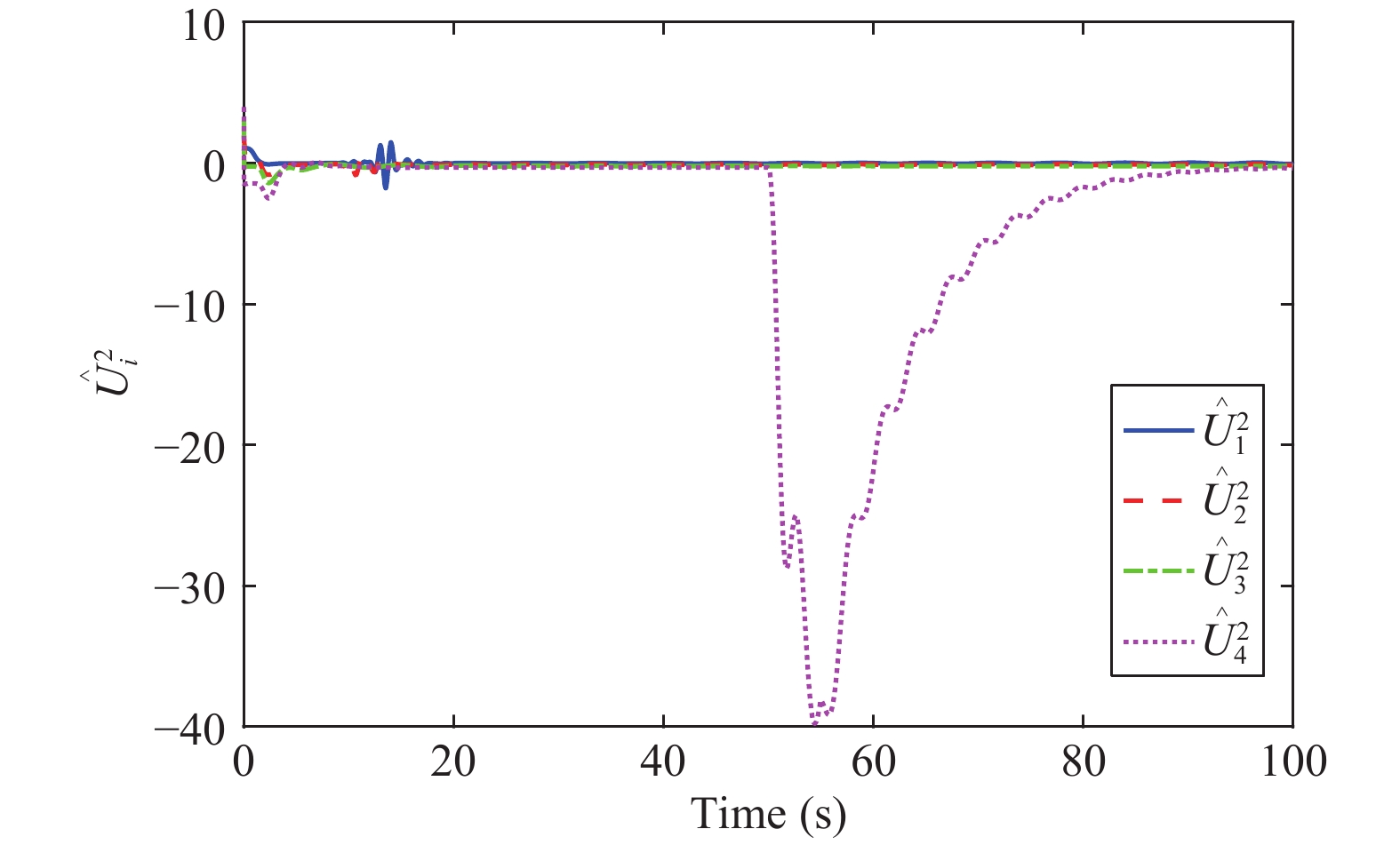
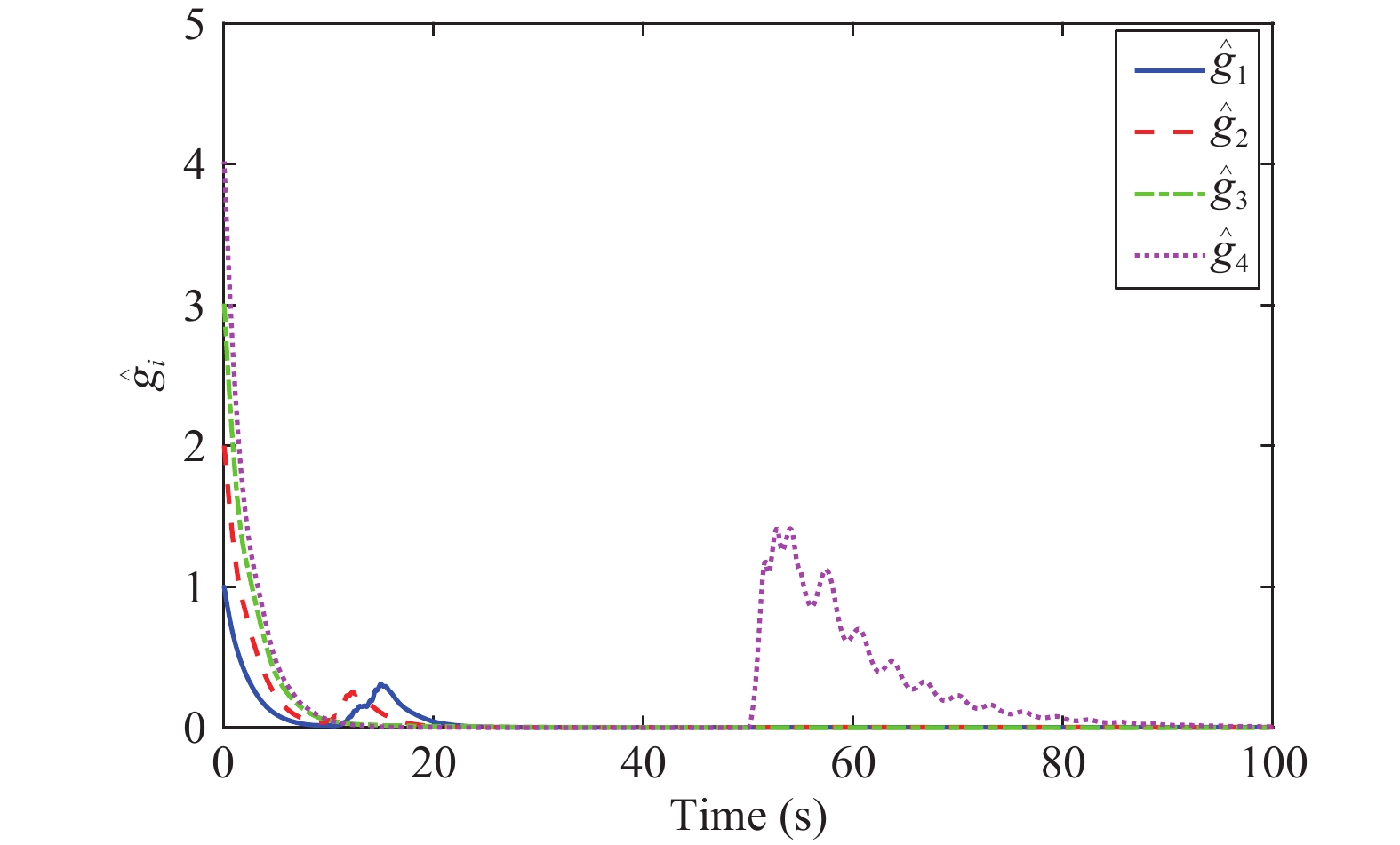
| Λ4={1,0≤t≤500.01,t>50 |
which implies that the actuator is loss-of-effectiveness at
The initial states of the systems and the adaptive distributed observer are set as
The regulated outputs

This paper has proposed a novel distributed adaptive robust fault-tolerant control method to deal with the COR problem for heterogeneous MASs with matched system uncertainties and mismatched coupling uncertainties among subsystems under the influence of actuator faults. A new fault-tolerant controller has been proposed to compensate for the influence of matched system uncertainties and actuator faults. Further, a sufficient condition based on linear matrix inequality technique has been provided to guarantee the solvability of the considered problem under the influence of mismatched coupling uncertainties. It has been shown that the COR problem can be solved via the developed method by using the Lyapunov stability theory and cyclic-small-gain theorem.
Now we prove via mathematical induction.
1) Consider the subsystems which can receive the information from the exosystem. Define
| ˙˜ηi=ˉS˜ηi+ˉTνi. | (43) |
According to (12) and (43), we have
| ˙τi=ˉSτi−cˉTˉTTR(ζi−˜ηi)−ιsign(ζi−˜ηi) |
where
| ˙τ=(IN⊗ˉS)τ−c(L1⊗ˉTˉTTR)τ−ιsign((L1⊗R)τ). |
Let
| ˙W=2τTiRˉSτi−2cτTiRˉTˉTTRτi−2ι||Rτi||1. |
Applying Theorem 4.2 in [34], it can be shown that
From (43) and the definitions of
| ˙˜ηij=ˉSnjj˜ηij+Ti(νij+r∑k=1αjk˜ηik). | (44) |
Substituting the value of of
| ˙˜ηij=ˉSnjj˜ηij+Ti(−pj∑k=1βkijsign(ζkij)|ζkij|θkij−r∑k=1αjk(ζik−˜ηik)). | (45) |
Therefore, after finite-time, (45) will reduce to
| ˙˜ηij=ˉSnii˜ηij−Tipj∑k=1βkijsign(ζkij)|ζkij|θkij. | (46) |
According to Lemma 3, we have that
2) Consider the
Summing up 1) and 2), we can complete the proof. ■
| [1] |
C. Deng, Y. Wang, C. Y. Wen, Y. Xu, and P. F. Lin, “Distributed resilient control for energy storage systems in cyber-physical microgrids,” IEEE Trans. Ind. Informat., Mar. 2020. doi: 10.1109/TII.2020.2981549
|
| [2] |
X. G. Guo, J. L. Wang, F. Liao, and R. S. H. Teo, “CNN-based distributed adaptive control for vehicle-following platoon with input saturation,” IEEE Trans. Intell. Transp. Syst., vol. 19, no. 10, pp. 3121–3132, Oct. 2018. doi: 10.1109/TITS.2017.2772306
|
| [3] |
D. F. Wu, G. P. Zeng, L. G. Meng, W. J. Zhou, and L. M. Li, “Gini coefficient-based task allocation for multi-robot systems with limited energy resources,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 155–168, Jan. 2018. doi: 10.1109/JAS.2017.7510385
|
| [4] |
N. Xiao, W. H. Wang, L. H. Xie, T. Wongpiromsarn, E. Frazzoli, and D. Rus, “Road pricing design based on game theory and multiagent consensus,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 1, pp. 31–39, Jan. 2014. doi: 10.1109/JAS.2014.7004617
|
| [5] |
Y. Xu, H. Y. Lu, and Z. M. Xie, “Research on multi-robot cooperative location algorithm based on wireless sensor networks,” Int. J. Innov. Comput. Inf. Control, vol. 15, no. 5, pp. 1779–1792, 2019.
|
| [6] |
G. Wen and W. X. Zheng, “On constructing multiple Lyapunov functions for tracking control of multiple agents with switching topologies,” IEEE Trans. Autom. Control, vol. 64, no. 9, pp. 3796–3803, 2019. doi: 10.1109/TAC.2018.2885079
|
| [7] |
X. L. Wang, Y. G. Hong, J. Huang, and Z. P. Jiang, “A distributed control approach to a robust output regulation problem for multi-agent linear systems,” IEEE Trans. Autom. Control, vol. 55, no. 12, pp. 2891–2895, Dec. 2010. doi: 10.1109/TAC.2010.2076250
|
| [8] |
Y. F. Su, Y. G. Hong, and J. Huang, “A general result on the robust cooperative output regulation for linear uncertain multi-agent systems,” IEEE Trans. Autom. Control, vol. 58, no. 5, pp. 1275–1279, May 2013. doi: 10.1109/TAC.2012.2229837
|
| [9] |
H. Cai, F. L. Lewis, G. Q. Hu and J. Huang, “The adaptive distributed observer approach to the cooperative output regulation of linear multiagent systems,” Automatica, vol. 75, pp. 299–305, Jan. 2017. doi: 10.1016/j.automatica.2016.09.038
|
| [10] |
W. N. Gao, Z-P. Jiang, F. L. Lewis, and Y. B. Wang, “Leader-to-formation stability of multi-agent systems: An adaptive optimal control approach,” IEEE Trans. Autom. Control, vol. 63, no. 10, pp. 3581–3587, Oct. 2018. doi: 10.1109/TAC.2018.2799526
|
| [11] |
Y. W. Wang, Y. Lei, T. Bian, and Z. H. Guan, “Distributed control of nonlinear multi-agent systems with unknown and nonidentical control directions via event-triggered communication,” IEEE Trans. Cybern., 2019. doi: 10.1109/TCYB.2019.2908874
|
| [12] |
B. H. Wang, W. S. Chen, B. Zhang, and Y. Zhao, “Regulation cooperative control for heterogeneous uncertain chaotic systems with time delay: A synchronization errors estimation framework,” Automatica, vol. 108, pp. 108486, May 2019. doi: 10.1016/j.automatica.2019.06.038
|
| [13] |
Y. W. Wang, X. K. Liu, J. W. Xiao, and Y. J. Shen, “Output formation-containment of interacted heterogeneous linear systems by distributed hybrid active control,” Automatica, vol. 93, pp. 26–32, Jul. 2018. doi: 10.1016/j.automatica.2018.03.020
|
| [14] |
Y. Y. Guo, B. Jiang, and Y. M. Zhang, “A novel robust attitude control for quadrotor aircraft subject to actuator faults and wind gusts,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 292–300, Jan. 2018. doi: 10.1109/JAS.2017.7510679
|
| [15] |
C. L. Wang, L. Guo, C. Y. Wen, Q. L. Hu, and J. Z. Qiao, “Eventtriggered adaptive attitude tracking control for spacecraft with unknown actuator faults,” IEEE Trans. Ind. Electron., vol. 67, no. 3, pp. 2241–2250, 2020. doi: 10.1109/TIE.2019.2905837
|
| [16] |
Y. Gu and X. J. Li, “Fault detection for sector-bounded non-linear systems with servo inputs and sensor stuck faults,” J. Control Decis., vol. 6, no. 3, pp. 147–165, Jun. 2018.
|
| [17] |
K. Zhang, B. Jiang, and P. Shi, “Adjustable parameter-based distributed fault estimation observer design for multiagent systems with directed graphs,” IEEE Trans. Cybern., vol. 47, no. 2, pp. 306–314, Feb. 2017.
|
| [18] |
Y. M. Wu and Z. S. Wang, “Fuzzy adaptive practical fixed-time consensus for second-order nonlinear multiagent systems under actuator faults”, IEEE Trans. Cybern., 2019. doi: 10.1109/TCYB.2019.2963681.
|
| [19] |
Y. Yang and D. Yue, “Distributed adaptive fault-tolerant control of pure-feedback nonlinear multi-agent systems with actuator failures,” Neurocomputing, vol. 221, pp. 72–84, Jan. 2017. doi: 10.1016/j.neucom.2016.09.061
|
| [20] |
Q. K. Shen, B. Jiang, P. Shi, and J. Zhao, “Cooperative adaptive fuzzy tracking control for networked unknown nonlinear multiagent systems with time-varying actuator faults,” IEEE Trans. Fuzzy Syst., vol. 22, no. 3, pp. 494–504, Jun. 2014. doi: 10.1109/TFUZZ.2013.2260757
|
| [21] |
D. Ye, M. M. Chen, and H. J. Yang, “Distributed adaptive event-triggered fault-tolerant consensus of multiagent systems with general linear dynamics,” IEEE Trans. Cybern., vol. 49, no. 3, pp. 757–767, Mar. 2019. doi: 10.1109/TCYB.2017.2782731
|
| [22] |
X. Z. Jin, S. Wang, J. H. Qin, W. X. Zheng, and Y. Kang, “Adaptive fault-tolerant consensus for a class of uncertain nonlinear second-order multi-agent systems with circuit implementation,” IEEE Trans. Circuits Syst. I,Reg. Papers, vol. 65, no. 7, pp. 2243–2255, 2018. doi: 10.1109/TCSI.2017.2782729
|
| [23] |
C. Deng and G. H. Yang, “Distributed adaptive fault-tolerant control approach to cooperative output regulation for linear multi-agent systems,” Automatica, vol. 103, pp. 62–68, May 2019. doi: 10.1016/j.automatica.2019.01.013
|
| [24] |
C. Deng and C. Wen, “Distributed resilient observer-based fault tolerant control for heterogeneous multi-agent systems under actuator faults and DoS attacks,” IEEE Trans. Control Netw. Syst., 2020. doi: 10.1109/TCNS.2020.2972601
|
| [25] |
W. N. Gao, Y. Jiang, and M. Davari, “Data-driven cooperative output regulation of multi-agent systems via robust adaptive dynamic programming,” IEEE Trans. Circuits Syst. II,Exp. Briefs, vol. 66, no. 3, pp. 447–451, 2019. doi: 10.1109/TCSII.2018.2849639
|
| [26] |
Z. K. Li, M. Z. Q. Chen, and Z. T. Ding, “Distributed adaptive controllers for cooperative output regulation of heterogeneous agents over directed graphs,” Automatica, vol. 68, pp. 179–183, Jun. 2016. doi: 10.1016/j.automatica.2016.01.076
|
| [27] |
X. Wang and G. H. Yang, “Fault-tolerant consensus tracking control for linear multi-agent systems under switching directed network,” IEEE Trans. Cybern., 2019, doi: 10.1109/TCYB.2019.2901542.
|
| [28] |
S. P. Bhat and D. S. Bernstein, “Geometric homogeneity with applications to finite-time stability,” Math. Control Signals Syst.(MCSS)
|
| [29] |
C. Deng, W. W. Che, and P. Shi, “Cooperative fault-tolerant output regulation for multi-agent systems by distributed learning control approach,” IEEE Trans. Neural Netw. Learn. Syst., doi: 10.1109/TNNLS.2019.2958151, 2019.
|
| [30] |
C. Q. Liu, Y. Q. Wang, D. H. Zhou, and X. Shen, “Minimum-variance unbiased unknown input and state estimation for multi-agent systems by distributed cooperative filters,” IEEE Access, vol. 6, pp. 18128–18141, 2018. doi: 10.1109/ACCESS.2018.2815662
|
| [31] |
J. J. E. Slotine and W. P. Li, Applied Nonlinear Control, Prentice hall Englewood Cliffs, NJ., 1991.
|
| [32] |
G. Wheeler, C.-Y. Su, and Y. Stepanenko, “A sliding mode controller with improved adaptation laws for the upper bounds on the norm of uncertainties,” in Proc. Amer. Control Conf., 1997, pp. 2133–2137.
|
| [33] |
Z. Zhu, Y. Q. Xia, and M. Y. Fu, “Adaptive sliding mode control for attitude stabilization with actuator saturation,” IEEE Trans. Ind. Electron., vol. 58, no. 10, pp. 4898–4907, Oct. 2011.
|
| [34] |
S. P. Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems,” SIAM J. Control Optim., vol. 38, no. 3, pp. 751–766, 2000. doi: 10.1137/S0363012997321358
|
| [1] | Pei-Ming Liu, Xiang-Gui Guo, Jian-Liang Wang, Daniel Coutinho, Lihua Xie. Chattering-Free Fault-Tolerant Cluster Control and Fault Direction Identification for HIL UAV Swarm With Pre-Specified Performance[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 183-197. doi: 10.1109/JAS.2024.124827 |
| [2] | Chao Zhou, Zehui Mao, Bin Jiang, Xing-Gang Yan. Adaptive Fault-Tolerant Consensus Tracking Control for Nonlinear Multi-Agent Systems With Double Semi-Markovian Switching Topologies and Unknown Control Directions[J]. IEEE/CAA Journal of Automatica Sinica. doi: 10.1109/JAS.2025.125285 |
| [3] | Yunfeng Hu, Chong Zhang, Bo Wang, Jing Zhao, Xun Gong, Jinwu Gao, Hong Chen. Noise-Tolerant ZNN-Based Data-Driven Iterative Learning Control for Discrete Nonaffine Nonlinear MIMO Repetitive Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 344-361. doi: 10.1109/JAS.2023.123603 |
| [4] | Lihong Feng, Bonan Huang, Jiayue Sun, Qiuye Sun, Xiangpeng Xie. Adaptive Event-Triggered Time-Varying Output Group Formation Containment Control of Heterogeneous Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(6): 1398-1409. doi: 10.1109/JAS.2024.124260 |
| [5] | Xuerao Wang, Qingling Wang, Yanxu Su, Yuncheng Ouyang, Changyin Sun. Adaptive Sensor-Fault Tolerant Control of Unmanned Underwater Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 907-918. doi: 10.1109/JAS.2023.123837 |
| [6] | Jingshu Sang, Dazhong Ma, Yu Zhou. Group-Consensus of Hierarchical Containment Control for Linear Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1462-1474. doi: 10.1109/JAS.2023.123528 |
| [7] | Hongru Ren, Hui Ma, Hongyi Li, Zhenyou Wang. Adaptive Fixed-Time Control of Nonlinear MASs With Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252-1262. doi: 10.1109/JAS.2023.123558 |
| [8] | Shuyi Xiao, Jiuxiang Dong. Distributed Fault-Tolerant Containment Control for Nonlinear Multi-Agent Systems Under Directed Network Topology via Hierarchical Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(4): 806-816. doi: 10.1109/JAS.2021.1003928 |
| [9] | Yanxu Su, Qingling Wang, Changyin Sun. Self-triggered Consensus Control for Linear Multi-agent Systems With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(1): 150-157. doi: 10.1109/JAS.2019.1911837 |
| [10] | Zhenyuan Guo, Shaofu Yang, Jun Wang. Global Synchronization of Stochastically Disturbed Memristive Neurodynamics via Discontinuous Control Laws[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2): 121-131. |
| [11] | Yuanqing Xia, Ning Zhou, Kunfeng Lu, Yong Li. Attitude Control of Multiple Rigid Bodies with Uncertainties and Disturbances[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 2-10. |
| [12] | Wen Qin, Zhongxin Liu, Zengqiang Chen. Formation Control for Nonlinear Multi-agent Systems with Linear Extended State Observer[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 171-179. |
| [13] | Airong Wei, Xiaoming Hu, Yuzhen Wang. Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 84-91. |
| [14] | Hao Zhang, Gang Feng, Huaicheng Yan, Qijun Chen. Distributed Self-triggered Control for Consensus of Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40-45. |
| [15] | Manoj Kumar, Karthikeyan Rajagopal, Sivasubramanya Nadar Balakrishnan, Nhan T. Nguyen. Reinforcement Learning Based Controller Synthesis for Flexible Aircraft Wings[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4): 435-448. |
| [16] | Jing Na, Guido Herrmann. Online Adaptive Approximate Optimal Tracking Control with Simplified Dual Approximation Structure for Continuous-time Unknown Nonlinear Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4): 412-422. |
| [17] | Mark J. Balas, Susan A. Frost. Robust Adaptive Model Tracking for Distributed Parameter Control of Linear Infinite-dimensional Systems in Hilbert Space[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 294-301. |
| [18] | Kyriakos G. Vamvoudakis. Event-Triggered Optimal Adaptive Control Algorithm for Continuous-Time Nonlinear Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 282-293. |
| [19] | Nhan T. Nguyen, Sivasubramanya N. Balakrishnan. Bi-Objective Optimal Control Modification Adaptive Control for Systems with Input Uncertainty[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4): 423-434. |
| [20] | Tengfei Liu, Zhongping Jiang. Distributed Control of Nonlinear Uncertain Systems: A Cyclic-small-gain Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 46-53. |

Figures(9)




Chao Deng, Weinan Gao and Weiwei Che, "Distributed Adaptive Fault-Tolerant Output Regulation of Heterogeneous Multi-Agent Systems With Coupling Uncertainties and Actuator Faults," IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1098-1106, July 2020. doi: 10.1109/JAS.2020.1003258
 DownLoad:
DownLoad:


























































 DownLoad:
DownLoad:







