






















































Figure
1.
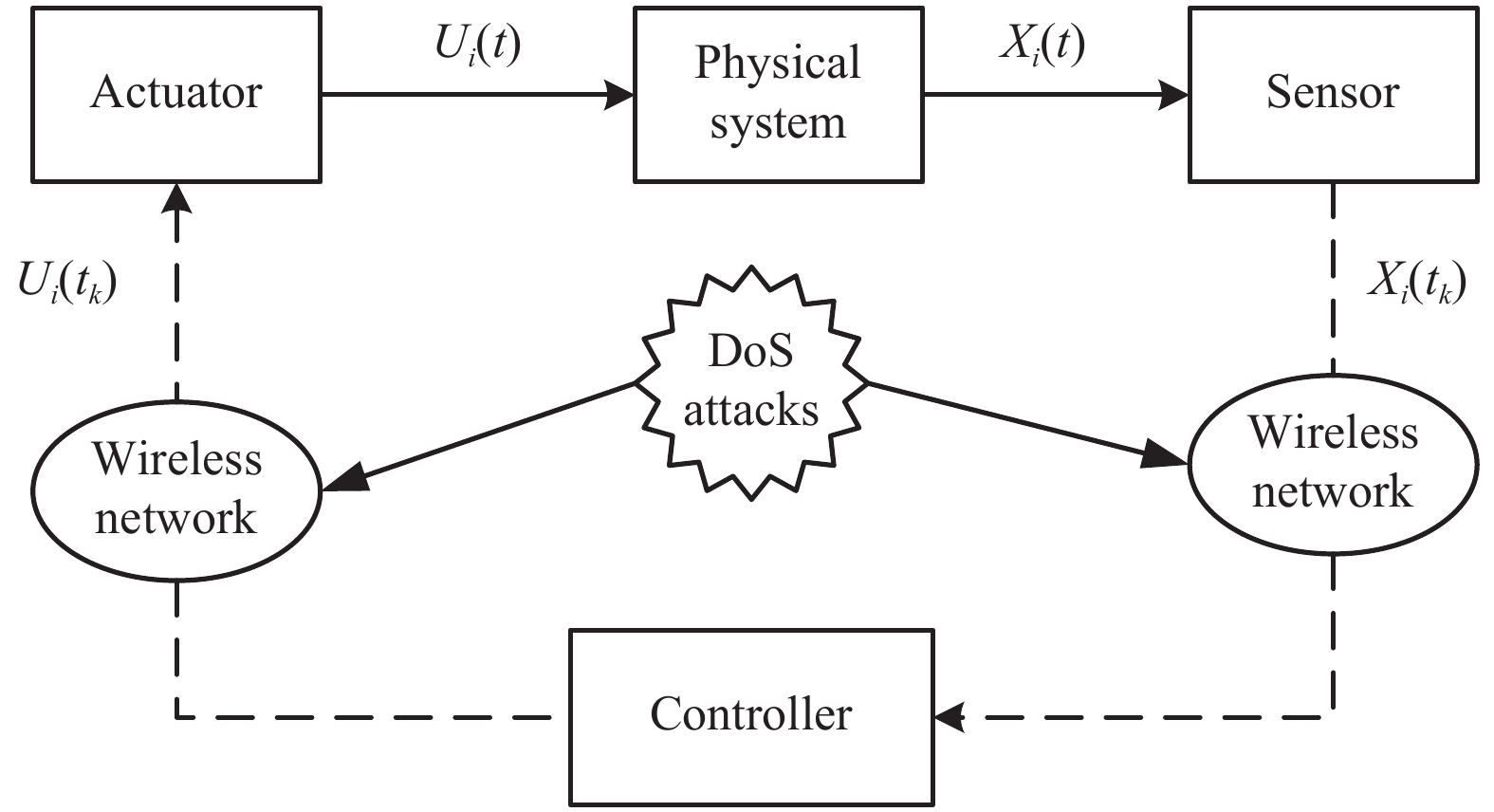
Framework of the CDNs under DoS attacks.
 Volume 7
Issue 5
Volume 7
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | Ning Wang and Xiaojian Li, "Secure Synchronization Control for a Class ofCyber-Physical Systems WithUnknown Dynamics," IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1215-1224, Sept. 2020. doi: 10.1109/JAS.2020.1003192

|
CYBER-PHYSICAL systems (CPSs) combine physical processes, computational resources, with communication capability [1], which have been studied intensively for their various fields of applications, such as power grid systems in [2], multi-agent systems in [3]–[6] and smart networked systems in [7], [8]. However, CPSs embedded networked control technique are more vulnerable on account of cyber attacks. Therefore, the security of CPSs has recently attracted extensive concern in control field, such as secure state estimation under sparse attacks in [9], [10], secure control and distributed filtering under deception attacks in [11], [12], the resilient control for systems under replay attacks in [13] and the effects of denial-of-service (DoS) attacks on systems in [14]–[19].
DoS attacks, a kind of common attacks in CPSs, attempt to render some or all components of a control system inaccessible by preventing the information transmission. Some existing studies referred to DoS attacks have been published. For example, the stability analysis for a networked system in the presence of DoS attacks, which is on assumptions about the limited DoS attacks frequency and duration, is given in [14]. In [15]–[19], some resilient control methods for CPSs under DoS attacks, which is used to maximize frequency and duration of DoS attacks under the condition that the close-loop stability is not destroyed [15], are introduced. In order to improve the resilience ability of a system under DoS attacks, the state estimation problem is proposed in [20]–[22]. While, the above results are all for a single system.
Recently, based on the studies for a single system, the secure synchronization problem of complex networked systems, which results from that the synchronization behavior relying on the information of other nodes will be affected when DoS attacks successfully break down the information transmission channels, has triggered considerable attentions [23]–[26]. For example, for complex dynamical networks (CDNs) under recoverable attacks destroying the network topology, the authors in [24] introduced the attack frequency and the average recovering time to study the secure synchronization problem. In the presence of DoS attacks interrupting the communication channels of each agent in [25], [26], some sufficient conditions about achieving secure consensus of multi-agent systems are derived by using the Lyapunov function approach. However, it should be pointed that the exact system dynamic matrices are required to be known to analyze the stability of a networked system in [14]–[22] or to solve the secure synchronization control problem in [23]–[26].
In fact, in the absence of DoS attacks, the synchronization problem for the complex networked systems with unknown dynamics has been investigated. To solve optimal synchronization problems of multi-agent systems, a Q-learning method and a model-free off-policy reinforcement learning approach are developed in [27], [28], respectively. Besides, for CDNs of which the couplings are involved in node dynamic equations, the optimal synchronization control problem has been explored in our previous works [29], [30]. Nevertheless, the above results [27]–[30] about the complex networked systems with unknown dynamics were all based on the assumption that the networks were attack free. For the case that the CDNs are with unknown dynamics, how to design the secure synchronization control strategy and further to characterize the frequency and duration of DoS attacks under which the stability of synchronization errors is not destroyed, are challenging. Therefore, it is highly desired to study those problems, which motivates the current research.
In this paper, the secure synchronization control problem is considered for a class of CDNs with unknown dynamics in the presence of intermittent DoS attacks. The main contributions of this paper are summarized as follows.
1) For the attack cases, the stability analysis of synchronization errors cannot be directly carried out by using the existing Lyapunov function approach due to the presence of unknown system matrices. To overcome this difficulty, a matrix polynomial replacement method is proposed in the paper. More specifically, the unknown system matrices involved in the Lyapunov function are replaced with the known control gain matrices derived by iteratively solving an algebraic Riccati equation (ARE). And based on the replacement method, the decay rates about sleeping and active intervals of DoS attacks are further computed by solving a set of linear matrix inequalities.
2) According to the obtained decay rates and using the switching technique, the upper bounds of the frequency and duration of DoS attacks, under which the CDNs with unknown dynamics achieve secure synchronization, are given in terms of inequalities.
This paper is organized as follows. In Section II, some necessary concepts about the graph theory and the attack model are presented. An optimal synchronization control protocol is proposed in Section III. Stability analysis of secure synchronization is given in Section IV. In Section V, two examples of the CDNs are provided. Conclusion is given in Section VI.
Notations: In this paper,
A directed graph (digraph)
| L=[∑m≠1l1m−l12⋯−l1N−l21∑m≠2l2m⋯−l2N⋮⋮⋱⋮−lN1−lN2⋯∑m≠NlNm]. |
More detailed concepts on the digraph were shown in [31].
Consider the CDNs model with
| ˙xi(t)=Axi(t)+Biui(t)+N∑j=1,j≠ilijΓi(xj(t)−xi(t)) | (1) |
where
Assume the dynamic equation of the leader has the following form
| ˙z0=Sz0 | (2) |
where
Assumption 1:
In practice, the state information
Due to the energy constraint of adversaries [32], [33], DoS attacks need to terminate attack activities and shift to a sleep period to supply its energy for next attack. That is to say, one adversary launches DoS attacks discontinuously. As mentioned in [14] and [19],
| Ts=[zs,zs+ds) | (3) |
means the time interval of the
| Ξ(τ,t)=⋃j∈NTs⋂[τ,t] | (4) |
| Λ(τ,t)=[τ,t]∖Ξ(τ,t) | (5) |
which denote, during each interval
Further, let
| Δk=tk+1−tk | (6) |
for
| xi(tk)={0,t∈Ξ(0,+∞)xi(tk),t∈Λ(0,+∞) |
with
| ui(tk)={0,t∈Ξ(0,+∞)ui(tk),t∈Λ(0,+∞). |
Similar to [14], there are two assumptions for DoS attacks.
Assumption 2 (DoS frequency): There exist constants
| n(τ,t)≤η+t−ττD. | (7) |
Assumption 3 (DoS Duration): There exists constant
| ∣Ξ(τ,t)∣≤t−τT. | (8) |
Assumption 2 is inspired by the concept of average dwell time [14] to specify the number of DoS attacks occurring on the interval
Now, the considered problem in this paper is presented as follows.
Problem 1: The main objective of this paper is to design a secure synchronization control law for the system (1) with unknown system matrices, such that the synchronization errors are asymptotically convergent for both attack-free and attack cases.
By using (1) and (2), define the synchronization error
| ei=xi−z0,i=1,2,…,N. | (9) |
Then the synchronization problem is described as
| limt→∞(xi−z0)=0,i=1,2,…,N. | (10) |
The dynamic equation of the synchronization error
| ˙ei=Aei+Biui+N∑j=1,j≠ilijΓi(ej−ei)=ˉAiei+Bi(ui+Fiωi) | (11) |
where
Besides, similar to [30], define the performance function for the
| Ji=12∫∞t(eTiQiei+uTiRiui+2uTiRiMiωi+ωTiFTiRiFiωi)dτ | (12) |
where
Theorem 1: For the error dynamics of CDNs (11) with the quadratic performance index (12), a control protocol is an optimal one if and only if it has the following form
| ui=−FiN∑j=1,j≠ilijΓiej−R−1iBTiPiei | (13) |
where
| ˉATiPi+PiˉAi+Qi−PiBiR−1iBTiPi=0. | (14) |
Proof: First, one gives the necessity proof of Theorem 1.
Based on (12), define the Hamiltonian function for (11) as
| Hi=12(eTiQiei+uTiRiui+2uTiRiMiωi+ωTiFTiRiFiωi)+λTi(t)(ˉAiei+Bi(ui+Fiωi)) | (15) |
where
| ui=−FiN∑j=1,j≠ilijΓiej−R−1iBTiλi. | (16) |
Since
| λi(t)=Piei | (17) |
where
| ˉATiPi+PiˉAi+Qi−PiBiR−1iBTiPi=0. |
Using (16) and (17), it yields the control law (13). Therefore, the necessity is proven.
The proof process of sufficiency for Theorem 1, which is divided into two steps, is given as follows.
Step 1: It is necessary to prove that the control law (13) ensures the asymptotical stability of the synchronization errors. That is to say
| limt→∞eTi(t)Piei(t)=0. | (18) |
Define the Lyapunov function of system (11) as
| ˙Vi(t)=˙eTiPiei+eTiPi˙eTi=(ˉAiei+Bi(ui+Fiωi))TPiei+eiPi(ˉAiei+Bi(ui+Fiωi))=eTi(PiˉAi+ˉATiPi−2PiBiR−1iBTiPi)ei=−eTi(Qi+PiBiR−1iBTiPi)ei. | (19) |
According to ARE (14), (19) is rewritten as
| ˙Vi(t)=−eTi(Qi+PiBiR−1iBTiPi)ei. | (20) |
Since
Step 2: Consider the following equation:
| limt→∞eTi(t)Piei(t)−eTi(t0)Piei(t0)=∫∞t0d(eTiPiei)dτdτ=∫∞t0(eTiPi˙ei+˙eiTPiei)dτ=∫∞t0(eTi(ˉATiPi+PiˉAi)ei+(ui+Fiωi)TBTiPiei+eTiPiBi(ui+Fiωi))dτ. | (21) |
Based on the ARE (14) and the condition (18), the performance index
| Ji=12(eTi(t0)Piei(t0)+∫∞t0(ui−ui∗)TRi(ui−ui∗)dτ) | (22) |
with
The optimal control law (13) is composed of the feedback control
Consider the optimal controller with the following form
| ui=−Kiei−FiN∑j=1,j≠ilijΓiej | (23) |
where
| Ki=R−1iBTiPi. | (24) |
When all system dynamics are accurately known, the feedback gain
| (ˉAi−BiKki)TPki+Pki(ˉAi−BiKki)+Qi+(Kk+1i)TRiKk+1i=0 | (25) |
with
However, when the system matrix
First, for a given stabilizing controller gain matrix
| eTi(t+δt)Pkiei(t+δt)−eTi(t)Pkiei(t)=∫t+δtteTi((ˉAki)TPki+PkiˉAki)ei+2(ui+Kkie+Fiωi)TBTiPkieidτ=−∫t+δtteTiQkieidτ+2∫t+δtt(ui+Kkiei+Fiωi)TRiKk+1ieidτ | (26) |
with
Further, for all
| δixx=[ˆei(t1)−ˆei(t0),ˆei(t2)−ˆei(t1),…,ˆei(tl)−ˆei(tl−1)]TIiee=[∫t1t0ei⊗eidτ,∫t2t1ei⊗eidτ,…,∫tltl−1ei⊗eidτ]TIieu=[∫t1t0ei⊗uidτ,∫t2t1ei⊗uidτ,…,∫tltl−1ei⊗uidτ]TIiew=[∫t1t0(ei⊗Fiωi)dτ,∫t2t1(ei⊗Fiωi)dτ,…,∫tltl−1(ei⊗Fiωi)dτ]T | (27) |
where
| ˆP=[p11,2p12,…,p22,2p23,…,2pn−1,n,pnn]T. | (28) |
According to (26)–(28), one has the following equation:
| Θki[ˆPikvec(Kk+1i)]=Ξki | (29) |
where
| Θki=[δixx,−2Iixx(Inq⊗(Kki)TRi)−2Iixu(Inq⊗Ri)−2Iixw(Inq⊗Ri)]Ξki=−Iixxvec(Qki). |
Furthermore, if
| [ˆPikvec(Kk+1i)]=(ΘkiTΘki)−1(Θki)TΞki. | (30) |
And the sequences of
Remark 1: The feedback gain
As shown in [14], there may be a time interval elapsing from the time
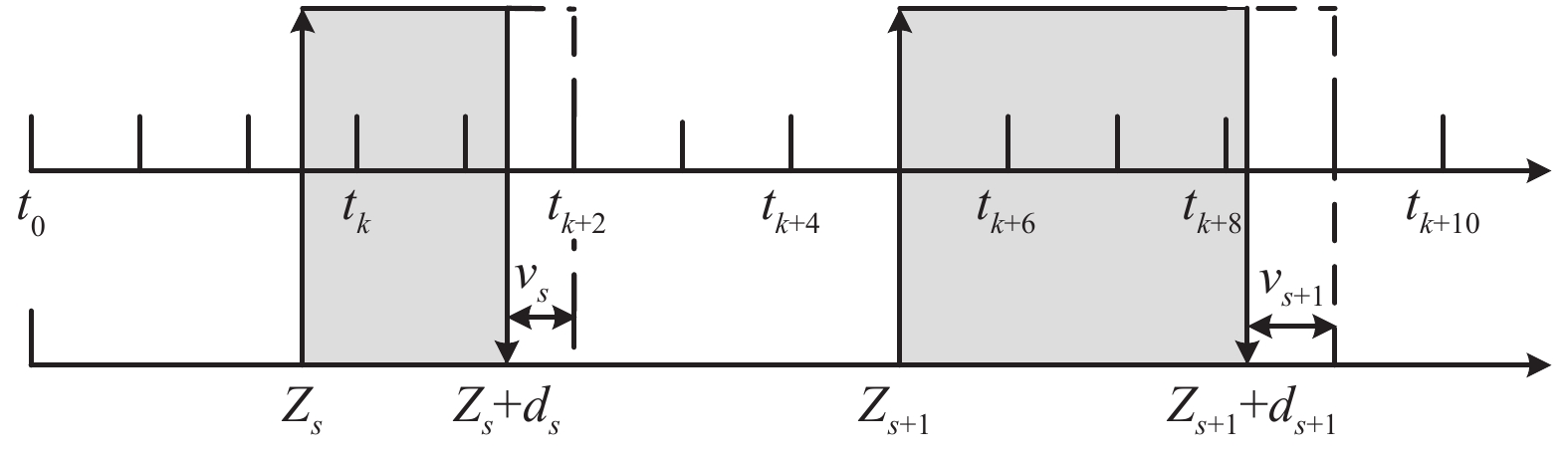
| vs≤Δk≤Δ∗ | (31) |
with
| ˜Ξ(τ,t)=⋃s∈N+Vs⋂[τ,t] | (32) |
| ˜Λ(τ,t)=[τ,t]∖˜Ξ(τ,t) | (33) |
where
| |˜Ξ(τ,t)|≤|Ξ(τ,t)|+(1+n(τ,t))Δ∗ | (34) |
| |˜Λ(τ,t)|=t−τ−|˜Ξ(τ,t)|≥t−τ−|Ξ(τ,t)|−(1+n(τ,t))Δ∗. | (35) |
Next, by using the Lyapunov function method and switching technique, the stability of the error systems (11) under DoS attacks will be discussed.
Note that, to analyze the stability of synchronization errors, the system dynamic matrices are required to be known in [23]–[26]. However, such a requirement cannot be satisfied in this paper, and then these existing methods are no longer applicable. To overcome this difficulty, a matrix polynomial replacement method is proposed based on the ARE (37) and the iterative learning results
Divide the process of stability analysis into two steps.
Step 1: Consider the time interval
| Via(t)=eTiPiaei. | (36) |
According to the ARE (14) and the condition
| (ˉAi−BiKi)TPia+Pia(ˉAi−BiKi)=−(Qi+KiTRiKi). | (37) |
Define
| ˙Via(t)=eTiφ(ˉAi,Pia)ei=−eTi(Qi+PiaBiR−1iBTiPia)ei. | (38) |
By resorting to ARE (37) and the iterative learning results
| ˙Via(t)=−eiTψ(Ki)ei. | (39) |
As clarified in Theorem 1, the error systems (11) are asymptotically stable during the time interval
| ˙Via(t)≤−αiVia | (40) |
with
| ψ(Ki)≥αiPia. | (41) |
Therefore, the convergence rate
Step 2: Consider the time interval
| Vib(t)=eTiPibei | (42) |
where its derivative satisfies
| ˙Vib(t)=˙eTiPibei+eTiPib˙eTi=eTi(ˉATiPib+PibˉAi)ei≤βVib | (43) |
with the exponential divergence rates
| ˉATiPib+PibˉAi≤βiPib. | (44) |
Choose
| ˉATi+ˉAi=AT+A−(N∑j=1,j≠ilijΓi)T−N∑j=1,j≠ilijΓi. | (45) |
Assumption 4: Assume
Based on Assumption 4, one has
| He(ˉAi)−He(N∑j=1,j≠ilijΓi)≤λmax(He(ˉAi))In−λmin(He(N∑j=1,j≠ilijΓi))In<βiIn | (46) |
which yields the following inequality
| βi>λmax(He(A))−λmin(He(N∑j=1,j≠ilijΓi)). | (47) |
Combining the above analysis results (41) and (47) of the piecewise Lyapunov functions (36) and (42), respectively, the stability of closed-loop system, which switches between stable and unstable subsystems, is established by using the switching technique. The conditions on the frequency and duration of DoS attacks, under which the secure synchronization can be guaranteed, are shown in Theorem 2.
Theorem 2: For system (11), suppose Assumptions 1–4 hold. Given any positive definite symmetric matrices
| 1T<mini{αi−θiαi+βi} | (48) |
| 1τD<mini{θi2lnμi+(αi+βi)Δ∗} | (49) |
where
Proof: Consider any time interval
| Vi(t)≤{eβi(t−zs)Vib(zs),t∈[zs,zs+ds+vs)e−αi(t−zs−ds−vs)Via(zs+ds+vs),t∈[zs+ds+vs,zs+1) | (50) |
Similar to [26], there are the following two cases:
Case 1: If
| Vi(t)≤eβi(t−zs)Vib(zs)≤μieβi(t−zs)Via(z−s)≤μieβi(t−zs)e−αi(zs−zs−1−ds−1−vs−1)×Via(zs−1+ds−1+vs−1)≤μ2ieβi(t−zs)e−αi(zs−zs−1−ds−1−vs−1)×Vib(z−s−1+d−s+v−s)≤μ2ieβi(t−zs+zs−1+ds−1+vs−1−zs−1)×e−αi(zs−zs−1−ds−1−vs−1)Vib(zs−1)⋮≤μ2s−1ieβi|˜Ξ(t0,t)|e−α|˜Λ(t0,t)|Vi(t0)=μ2n(t0,t)−1ieβi|˜Ξ(t0,t)|e−α|˜Λ(t0,t)|Vi(t0). | (51) |
Case 2: If
| Vi(t)≤e−αi(t−zs−ds−vs)Via(zs+ds+vs)≤μie−αi(t−zs−ds−vs)Vib(z−s+d−s+v−s)≤μie−αi(t−zs−ds−vs)eβi(zs+ds+vs−zs)Vib(zs)≤μ2ie−αi(t−zs−ds−vs)eβi(zs+ds+vs−zs)Via(z−s)⋮≤μ2sieβi|˜Ξ(t0,t)|e−αi|˜Λi(t0,t)|V(t0)=μ2n(t0,t)ieβi|˜Ξ(t0,t)|e−αi|˜Λ(t0,t)|Vi(t0). | (52) |
Thus, for
| Vi(t)≤μ2n(t0,t)ieβi|˜Ξ(t0,t)|e−αi|˜Λ(t0,t)|Vi(t0). | (53) |
According to Assumptions 2 and 3, and inequalities (34) and (35), it yields that
| Vi(t)≤μ2ηiie(αi+βi)(1+ηi)Δ∗×e−(αi−2lnμi+(αi+βi)Δ∗τD−αi+βiT)(t−t0)Vi(t0). | (54) |
Let
| Vi(t)≤ξie−δi(t−t0). | (55) |
From (48) and (49), it is known that
Remark 2: DoS attacks compromise certain or all transmission channels, which is also introduced in [15], [16], [19] and [26]. The case that all transmission channels are interrupted when DoS attacks occur is considered in Theorem 2. This case can also be found in [23] and [26].
Remark 3: The stability analysis of synchronization errors under DoS attacks in [23]–[26] is based on the Lyapunov function approach and the exact system dynamic matrices are required to be known. While, the system matrices are not available in this paper. To overcome this difficulty, the matrix polynomial
In this section, two complex dynamical network examples are taken to verify the effectiveness of above methods.
Example 1: Similar to [7], consider a spring-connected multi-vehicle system (shown in Fig. 3) composed of an isolated leader and four slave vehicles. The springs are regarded as the interconnection between two vehicles. In fact, the
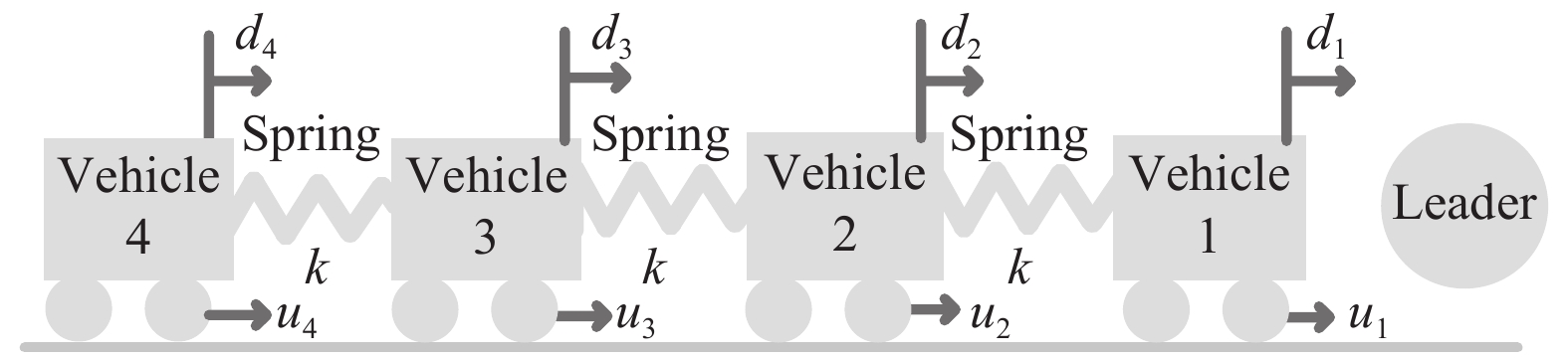
| mi¨di=N∑j=1,j≠ilijk(dj−di)+ui | (56) |
where
| ˙xi=Axi+N∑j=1,j≠ilijΓi(xj−xi)+ui | (57) |
where
| A=[0100],Γi=[00kmi0]. |
Here, assume
| ˙z0=[0100]z0. |
The simulation process is divided into two steps:
Step 1: Solving process of the solutions
Suppose the initial values
| Ki0=[0000] |
with
| e=550∑l=1sin(ωlt) | (58) |
where
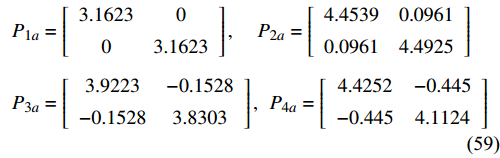
| P1a=[3.1623003.1623],P2a=[4.45390.09610.09614.4925]P3a=[3.9223−0.1528−0.15283.8303],P4a=[4.4252−0.445−0.4454.1124] | (59) |
| K1=[3.1623003.1623],K2=[4.45390.09610.09614.4925]K3=[3.9223−0.1528−0.15283.8303],K4=[4.4252−0.445−0.4454.1124]. | (60) |
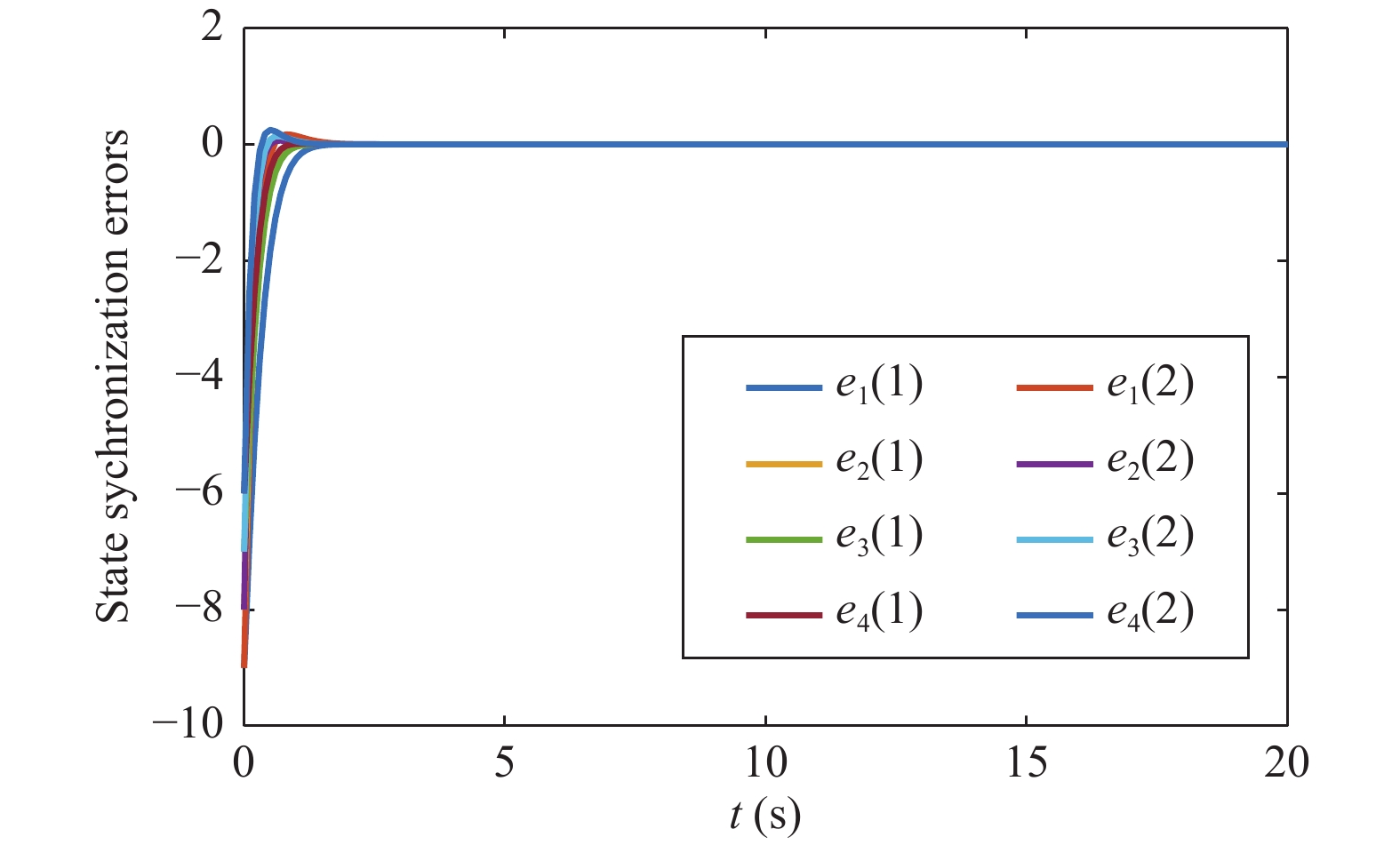
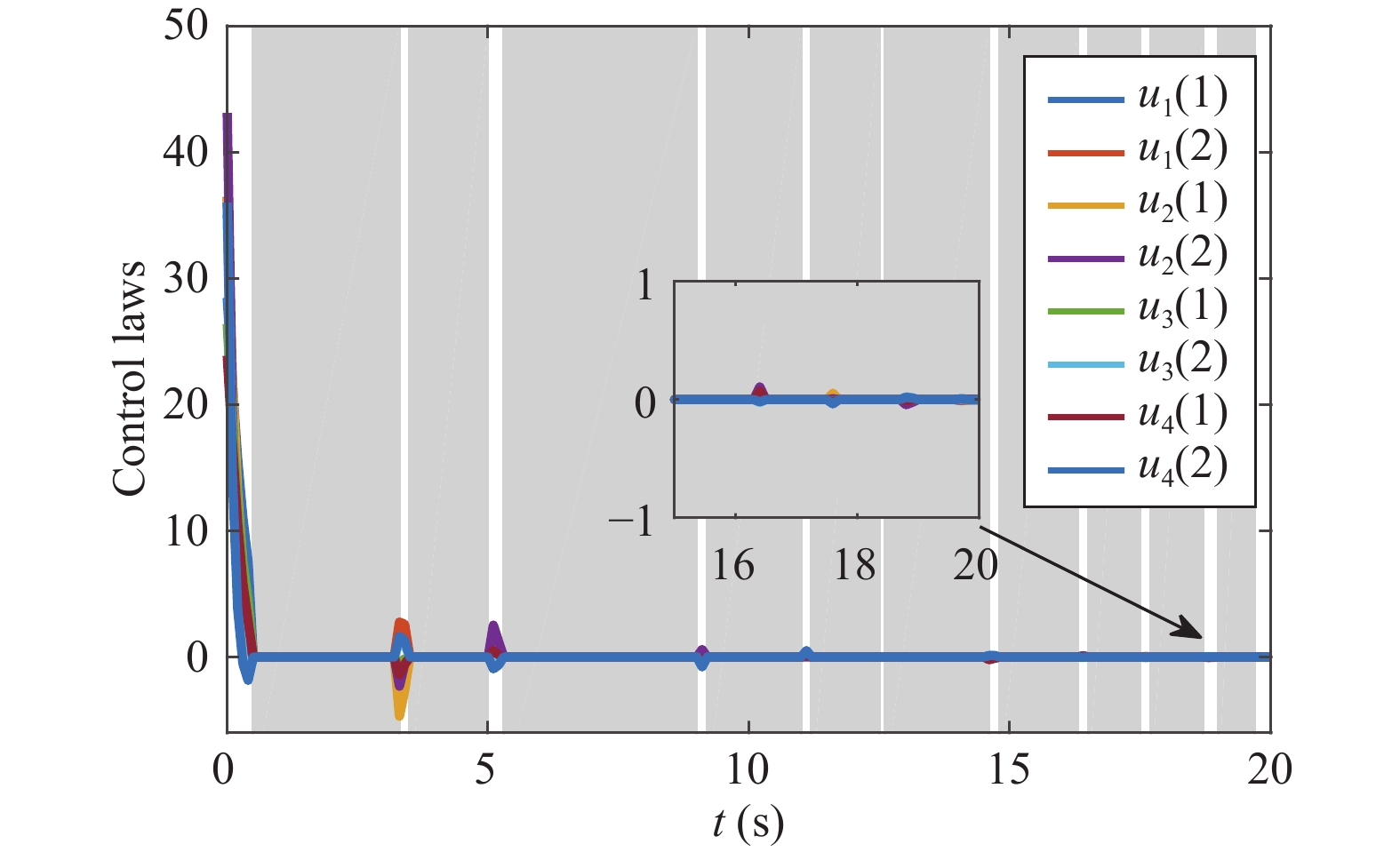
After applying the optimal control law (23) with obtained gains
Step 2: Stability analysis of secure synchronization.
Based on the analysis results (41) and (47), one gets
| α1=20.0000,α2=39.1422,α3=28.8137,α4=32.4177β1=2.0000,β2=1.8000,β3=2.3333,β4=3.0000μ1=3.1623,μ2=4.5712,μ3=4.0359,μ4=4.7405. | (61) |
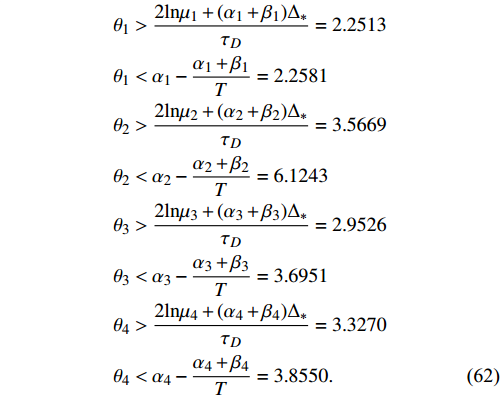
Assume the adversary launches DoS attacks with
| θ1>2lnμ1+(α1+β1)Δ∗τD=2.2513θ1<α1−α1+β1T=2.2581θ2>2lnμ2+(α2+β2)Δ∗τD=3.5669θ2<α2−α2+β2T=6.1243θ3>2lnμ3+(α3+β3)Δ∗τD=2.9526θ3<α3−α3+β3T=3.6951θ4>2lnμ4+(α4+β4)Δ∗τD=3.3270θ4<α4−α4+β4T=3.8550. | (62) |
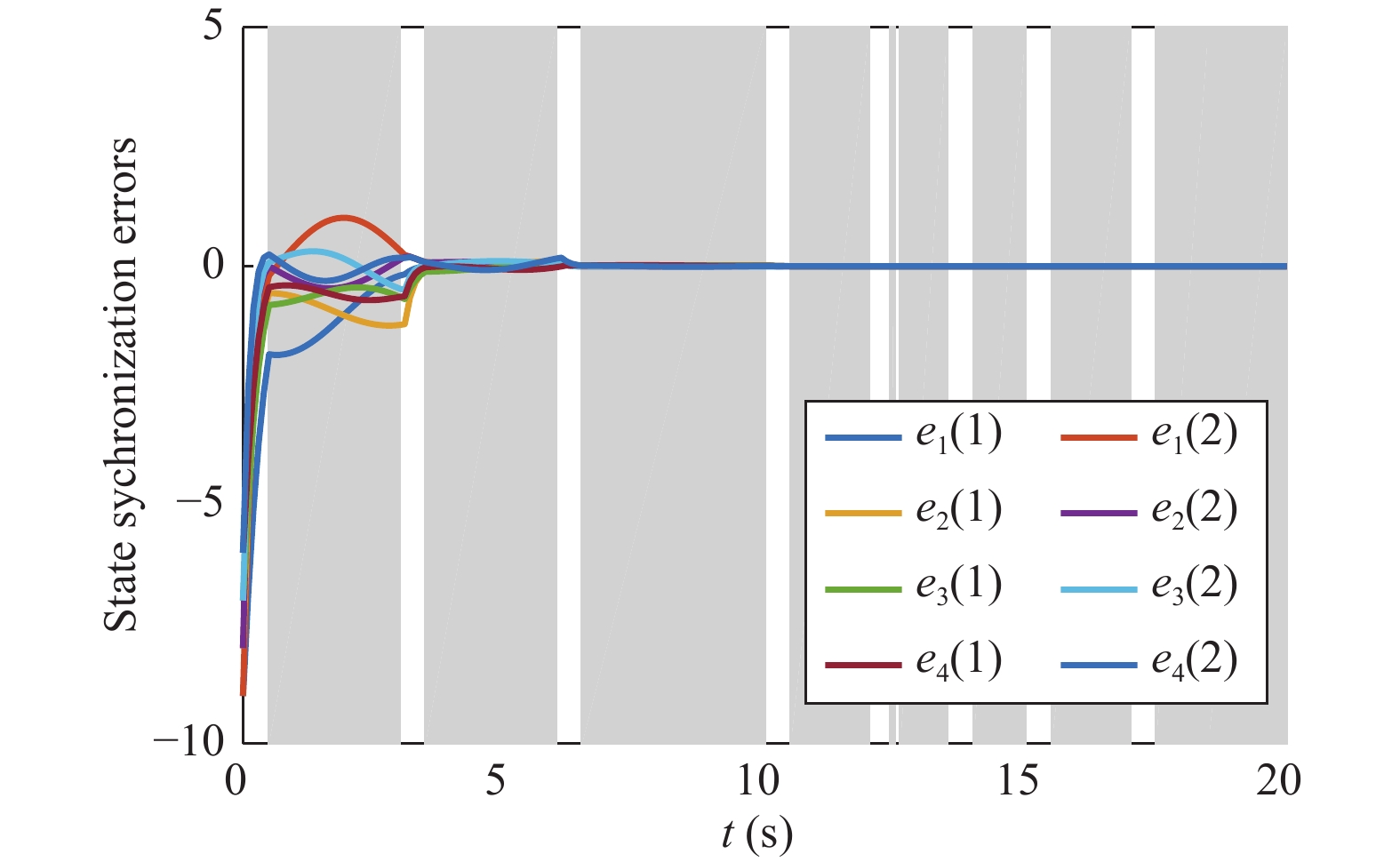
From (62), it is known that the conditions in (48) and (49) of Theorem 2 are satisfied. Further, the synchronization errors with DoS attacks are plotted in Fig. 5 and it is known that the states of the spring-connected multi-vehicle system with unknown dynamics can track the leader’s if the DoS frequency and DoS duration satisfy
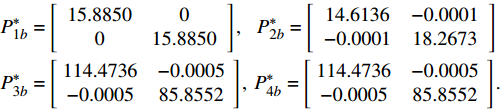
Moreover, under the assumption of availability on the system matrices
| P∗1b=[15.88500015.8850],P∗2b=[14.6136−0.0001−0.000118.2673]P∗3b=[114.4736−0.0005−0.000585.8552],P∗4b=[114.4736−0.0005−0.000585.8552]. |
According to
| 2.6141<θ1<2.6990,3.5712<θ2<5.28213.0548<θ3<3.8883,3.2350<θ4<4.3746. |
Obviously, the conditions in (48) and (49) of Theorem 2 are satisfied. The synchronization errors under DoS attacks with frequency satisfying
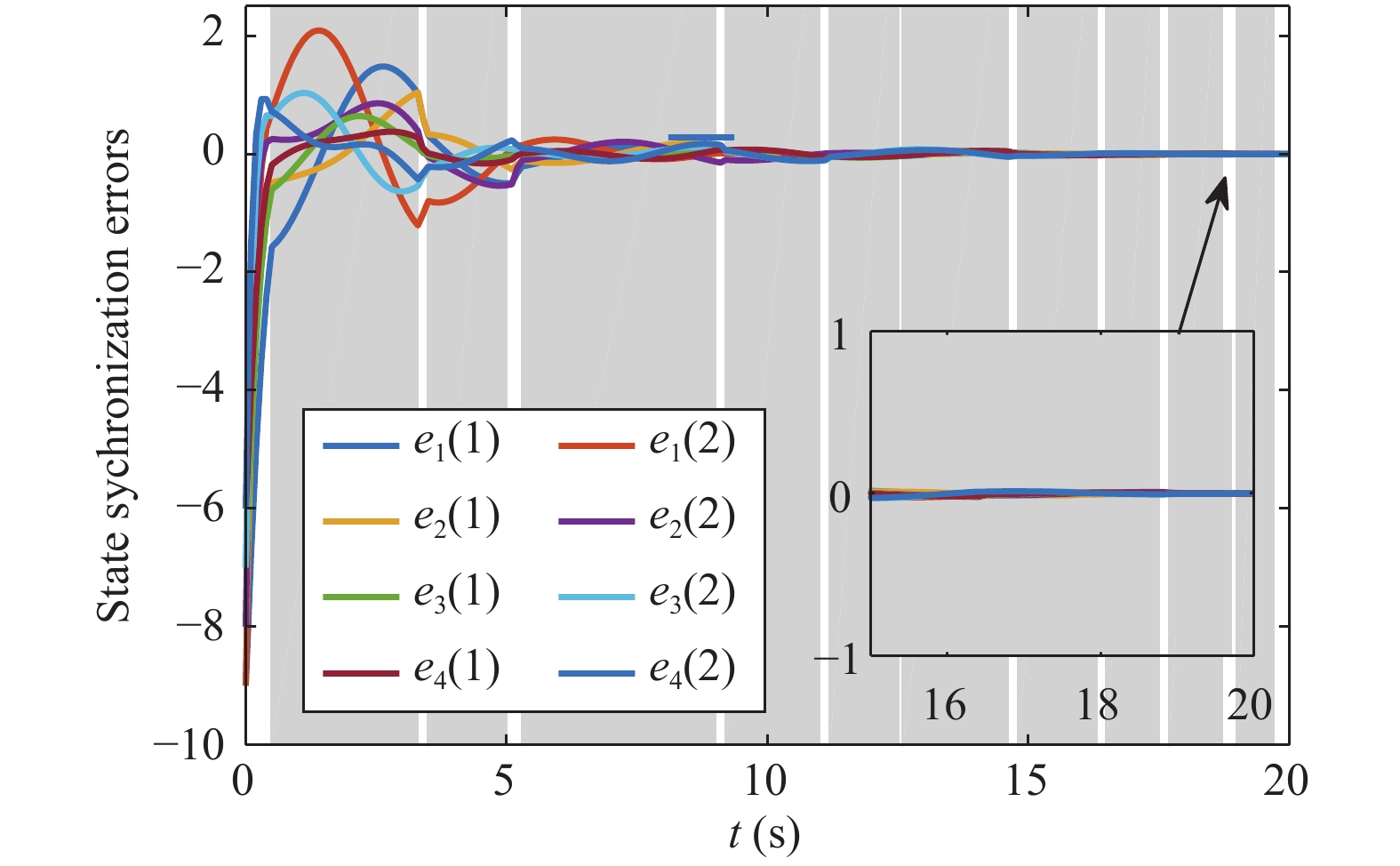
As shown above, the upper bounds of the DoS attack frequency and the DoS duration which are solved by the proposed method in this paper are slightly smaller than those obtained by the model based method.
To further prove the effectiveness of the proposed approaches in this paper, Example 2 with more complex graph structure is given as follows.
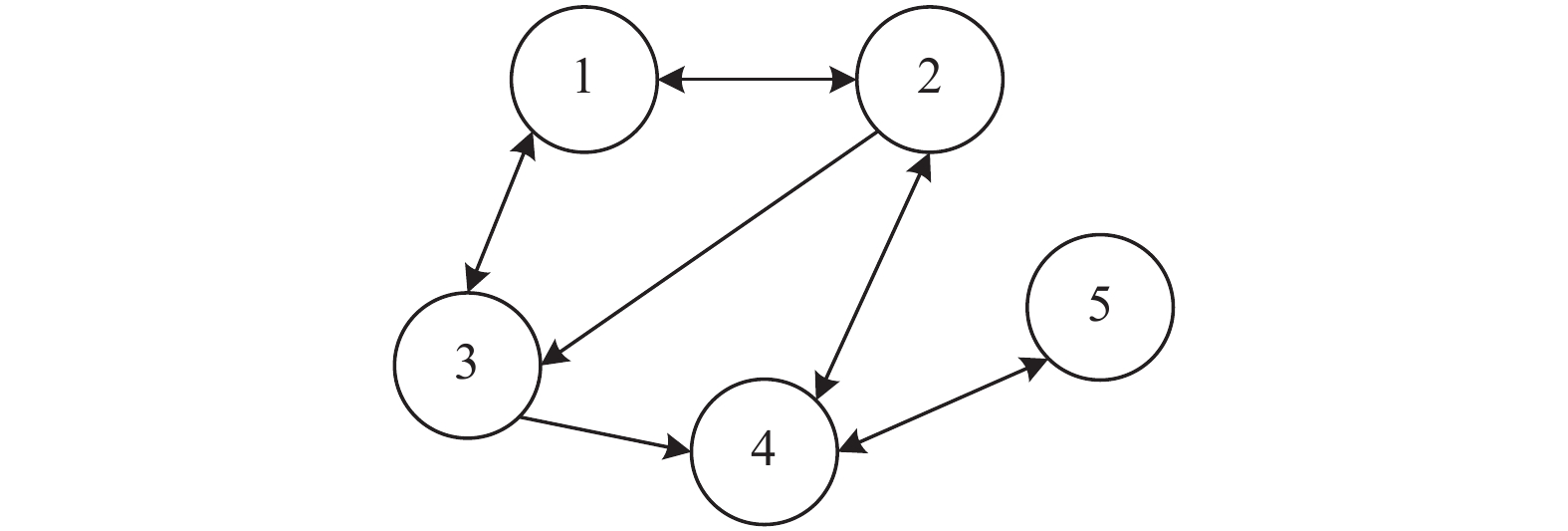
Example 2: Consider CDNs are with five nodes, and the correlative graph is shown in Fig. 9. The leader node’s dynamic is described as
| ˙x0(t)=[0.41−10]x0 |
and the system dynamics of five nodes are shown as
| A=[0.41−10] |
with
Similar to Example 1, the simulation process is divided into two steps.
Step 1: Use the policy iteration method to obtain the solutions
| Ki0=[1000.1]. |
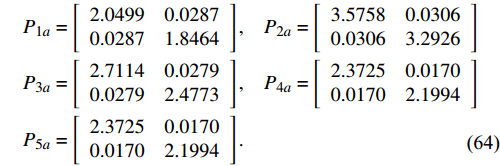
Besides, the other parameters are assumed to be the same as those in Example 1. By utilizing the PI method, the optimal solutions
| K1a=[2.04990.02870.02871.8464],K2a=[3.57580.03060.03063.2926]K3a=[2.71140.02790.02792.4773],K4a=[2.37250.01700.01702.1994]K5a=[2.37250.01700.01702.1994] | (63) |
| P1a=[2.04990.02870.02871.8464],P2a=[3.57580.03060.03063.2926]P3a=[2.71140.02790.02792.4773],P4a=[2.37250.01700.01702.1994]P5a=[2.37250.01700.01702.1994]. | (64) |
Step 2: Stability analysis of secure synchronization
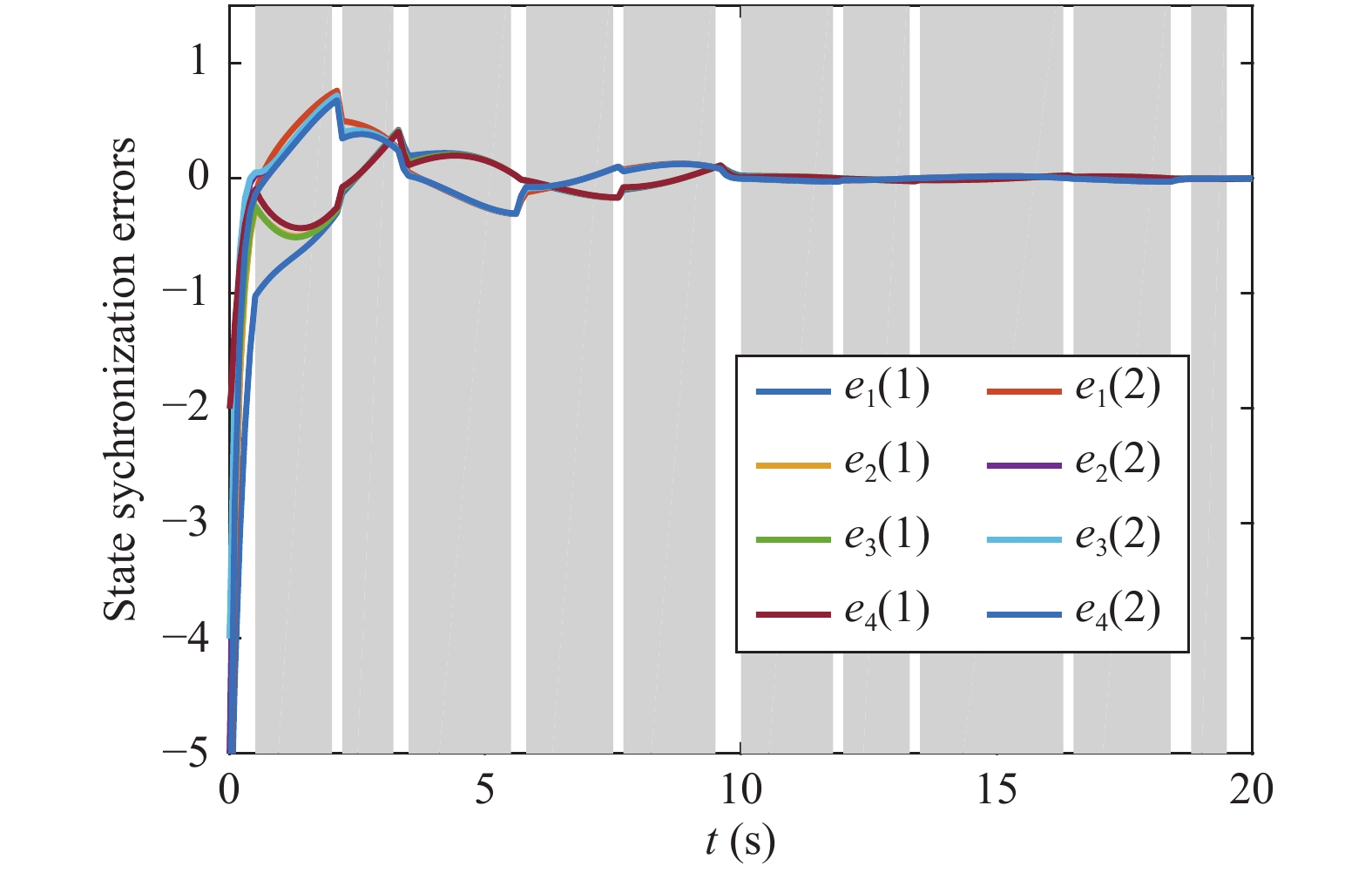
According to the analysis results (41) and (47), suppose that the DoS attacks with
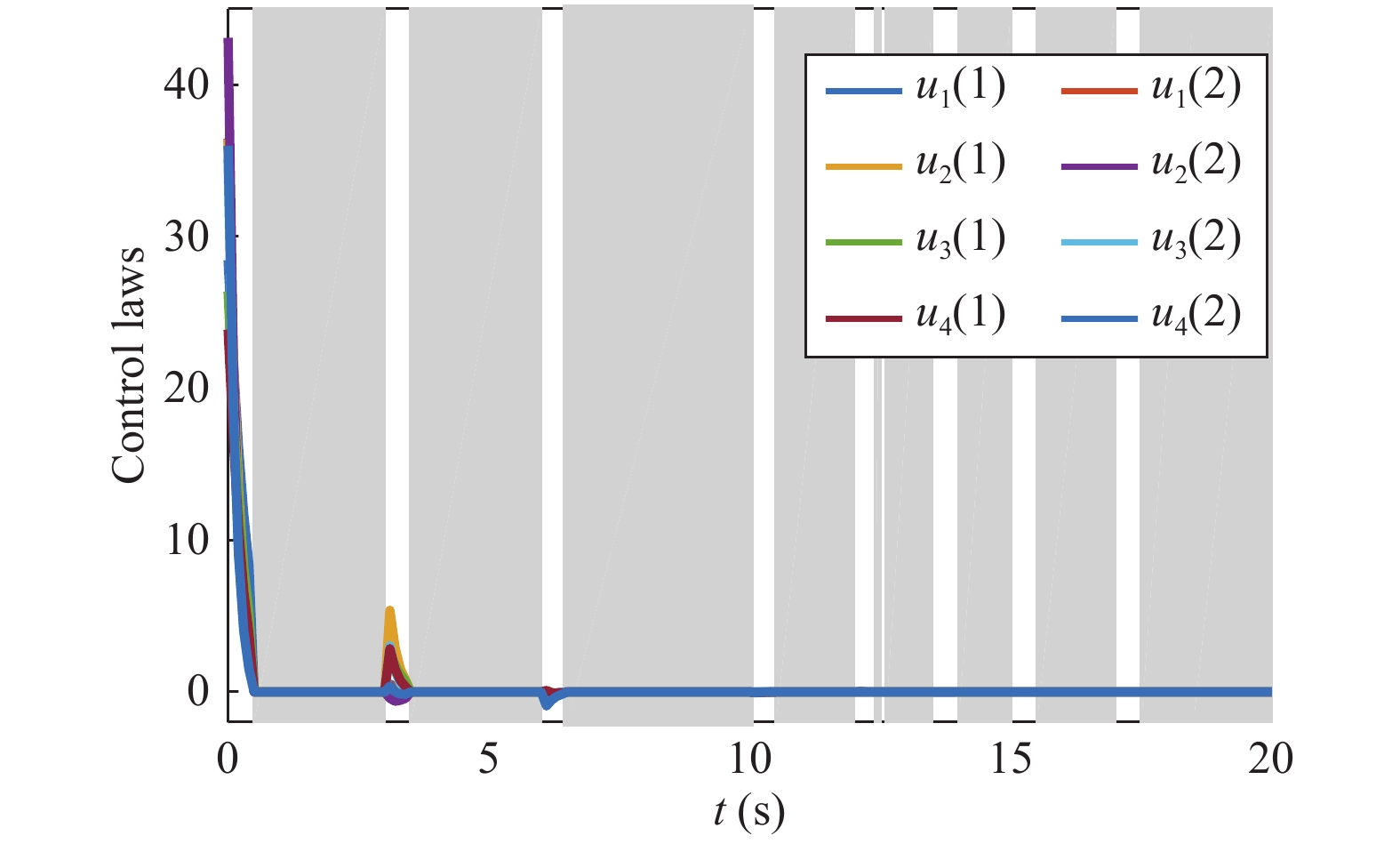
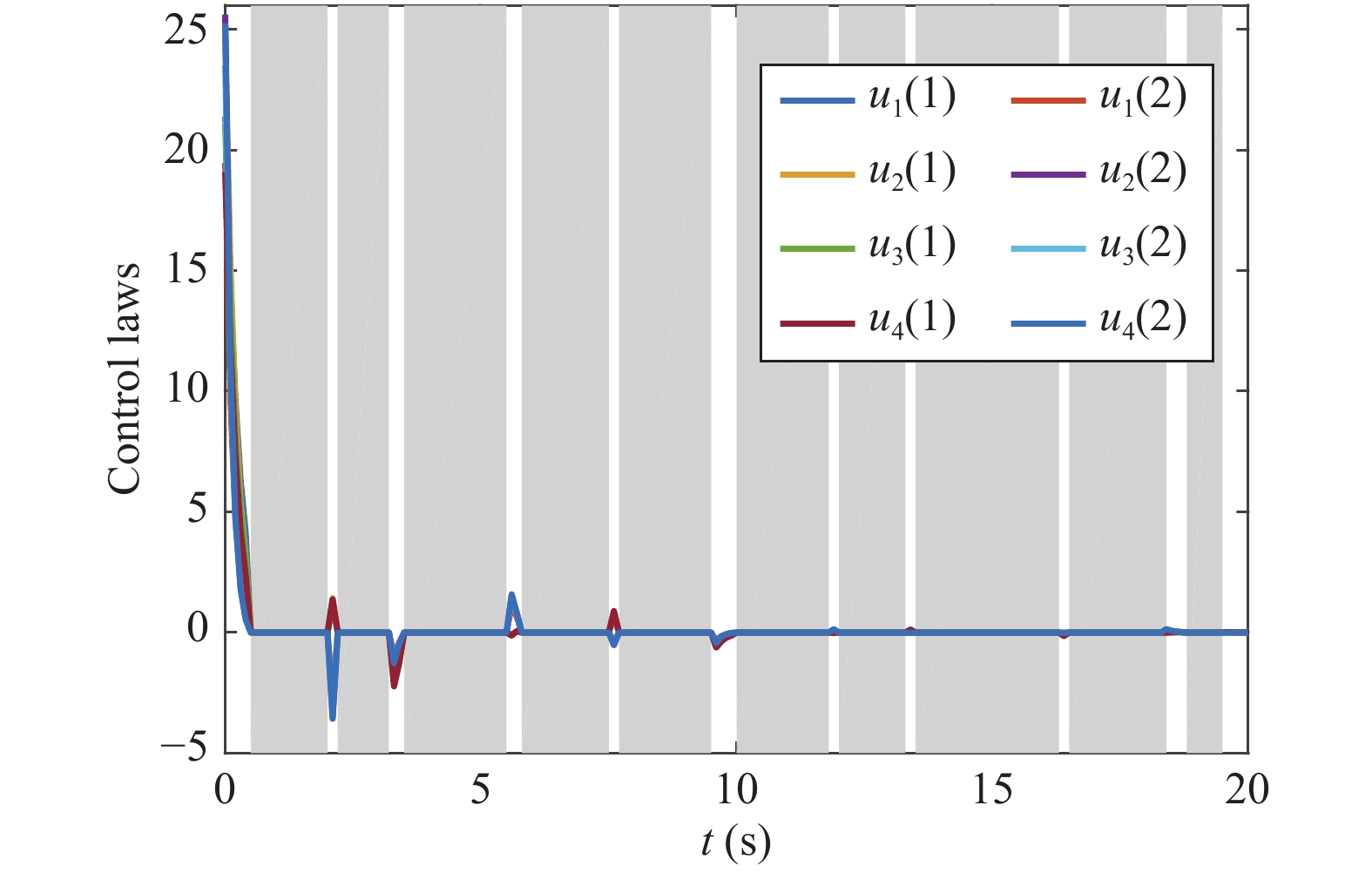
The synchronization errors under the DoS attacks are given in Fig. 10. Besides, the corresponding control laws
This paper investigates the secure synchronization control problem for CPSs subject to intermittent DoS attacks. The considered CPSs are modeled as a class of CDNs with unknown dynamics. First, to deal with the state couplings, a distributed optimal controller is proposed based on our previous works [29]. And the optimal feedback gain matrix is learned by iteratively solving the ARE. Especially, based on the ARE and the iteratively learning results, the decay rates for each node about sleeping and active intervals of DoS attacks, are determined by solving a set of linear matrix inequalities. Moreover, by using the switching technique and the obtained decay rates, the upper bounds of the DoS attacks frequency and duration, under which the synchronization for all nodes is still achieved, have been proposed. Finally, the simulations of two examples verify the effectiveness of the proposed methods.
| [1] |
V. Reppa, M. M. Polycarpou, and C. G. Panayiotou, “Distributed sensor fault diagnosis for a network of interconnected cyberphysical systems,” IEEE Trans. Control of Network Systems, vol. 2, no. 1, pp. 11–23, 2015. doi: 10.1109/TCNS.2014.2367362
|
| [2] |
A. Bidram, A. Davoudi, F. L. Lewis, and J. M. Guerrero, “Distributed cooperative secondary control of microgrids using feedback linearization,” IEEE Trans. Power Systems, vol. 28, no. 3, pp. 3462–3470, 2013. doi: 10.1109/TPWRS.2013.2247071
|
| [3] |
A. Isidori, L. Marconi, and G. Casadei, “Robust output synchronization of a network of heterogeneous nonlinear agents via nonlinear regulation theory,” IEEE Trans. Autom. Control, vol. 59, no. 10, pp. 2680–2691, 2014. doi: 10.1109/TAC.2014.2326213
|
| [4] |
M. H. Zhu and S. Martinez, “On the performance analysis of resilient networked control systems under replay attacks,” IEEE Trans. Autom. Control, vol. 59, no. 3, pp. 804–808, 2014. doi: 10.1109/TAC.2013.2279896
|
| [5] |
H. Liu, X. H. Cao, J. P. He, P. Cheng, C. G. Li, J. M. Chen, and Y. X. Sun, “Distributed identification of the most critical node for average consensus,” IEEE Trans. Signal Processing, vol. 63, no. 16, pp. 4315–4328, 2015. doi: 10.1109/TSP.2015.2441039
|
| [6] |
M. S. Rahman, M. A. Mahmud, A. M. T. Oo, and H. R. Pota, “Multi-agent approach for enhancing security of protection schemes in cyber-physical energy systems,” IEEE Trans. Industrial Informatics, vol. 13, no. 2, pp. 436–447, 2017. doi: 10.1109/TII.2016.2612645
|
| [7] |
X. Z. Jin, G. H. Yang, and W. W. Che, “Adaptive synchronization of master-slave large-scale systems against bias actuators and network attenuations,” Int. J. Control,Autom. and Systems, vol. 10, no. 6, pp. 1102–1110, 2012. doi: 10.1007/s12555-012-0604-1
|
| [8] |
Y. Wang, J. L. Xiong, and D. W. C. Ho, “Decentralized control scheme for large-scale systems defined over a graph in presence of communication delays and random missing measurements,” Automatica, vol. 98, pp. 190–200, 2018. doi: 10.1016/j.automatica.2018.09.023
|
| [9] |
A. Y. Lu and G. H. Yang, “Secure state estimation for cyber-physical systems under sparse sensor attacks via a switched Luenberger observer,” Information Sciences, vol. 417, pp. 454–464, 2017. doi: 10.1016/j.ins.2017.07.029
|
| [10] |
Y. Shoukry and P. Tabuada, “Event-triggered state observers for sparse sensor noise/attacks,” IEEE Trans. Autom. Control, vol. 61, no. 8, pp. 2079–2091, 2016. doi: 10.1109/TAC.2015.2492159
|
| [11] |
D. R. Ding, Z. D. Wang, D. W. C. Ho, and G. L. Wei, “Distributed recursive filtering for stochastic systems under uniform quantizations and deception attacks through sensor networks,” Automatica, vol. 78, pp. 231–240, 2017. doi: 10.1016/j.automatica.2016.12.026
|
| [12] |
X. Huang and J. X. Dong, “Reliable control policy of cyber-physical systems against a class of frequency-constrained sensor and actuator attacks,” IEEE Trans. Cybernetics, vol. 48, no. 12, pp. 3432–3439, 2018. doi: 10.1109/TCYB.2018.2815758
|
| [13] |
G. Franzè, F. Tedesco, and W. Lucia, “Resilient control for cyberPhysical systems subject to replay attacks,” IEEE Control Systems Letters, vol. 3, no. 4, pp. 984–989, 2019. doi: 10.1109/LCSYS.2019.2920507
|
| [14] |
C. D. Persis and P. Tesi, “Input-to-state stabilizing control under denial-ofservice,” IEEE Trans. Autom. Control, vol. 60, no. 11, pp. 2930–2944, 2015. doi: 10.1109/TAC.2015.2416924
|
| [15] |
S. Feng and P. Tesi, “Resilient control under denial-of-service: Robust design,” Automatica, vol. 79, pp. 42–51, 2017. doi: 10.1016/j.automatica.2017.01.031
|
| [16] |
V. S. Dolk, P. Tesi, C. De Persis, and W. P. M. H. Heemels, “Eventtriggered control systems under denial-of-service attacks,” IEEE Trans. Control of Network Systems, vol. 4, no. 1, pp. 93–105, 2017. doi: 10.1109/TCNS.2016.2613445
|
| [17] |
A. Y. Lu and G. H. Yang, “Input-to-state stabilizing control for cyberphysical systems with multiple transmission channels under denial of service,” IEEE Trans. Autom. Control, vol. 63, no. 6, pp. 1813–1820, 2018. doi: 10.1109/TAC.2017.2751999
|
| [18] |
S. L. Hu, D. Yue, X. L. Chen, Z. H. Cheng, and X. P. Xie, “Resilient H∞ filtering for event-triggered networked systems under nonperiodic DoS jamming attacks,” IEEE Trans. Systems, Man, and Cybernetics: Systems, Mar. 2019.
|
| [19] |
L. W. An and G. H. Yang, “Decentralized adaptive fuzzy secure control for nonlinear uncertain interconnected systems against intermittent DoS attacks,” IEEE Trans. Cybernetics, vol. 49, no. 3, pp. 827–838, 2017.
|
| [20] |
L. H. Peng, L. Shi, X. H. Cao, and C. Y. Sun, “Optimal attack energy allocation against remote state estimation,” IEEE Trans. Autom. Control, vol. 63, no. 7, pp. 2199–2205, 2017.
|
| [21] |
K. M. Ding, Y. Z. Li, D. E. Quevedo, S. Dey, and L. Shi, “A multi-channel transmission schedule for remote state estimation under DoS attacks,” Automatica, vol. 78, pp. 194–201, 2017. doi: 10.1016/j.automatica.2016.12.020
|
| [22] |
B. Chen, D. W. C. Ho, W. A. Zhang, and L. Yu, “Distributed dimensionality reduction fusion estimation for cyber-physical systems under DoS attacks,” IEEE Trans. Systems,Man,and Cybernetics:Systems, vol. 49, no. 2, pp. 455–468, 2017.
|
| [23] |
D. Zhang, L. Liu, and G. Feng, “Consensus of heterogeneous linear multiagent systems subject to aperiodic sampled-data and DoS attack,” IEEE Trans. Cybernetics, vol. 49, no. 4, pp. 1501–1511, 2018.
|
| [24] |
Y. W. Wang, H. O. Wang, J. W. Xiao, and Z. H. Guan, “Synchronization of complex dynamical networks under recoverable attacks,” Automatica, vol. 46, no. 1, pp. 197–203, 2010. doi: 10.1016/j.automatica.2009.10.024
|
| [25] |
Y. Xu, M. Fang, P. Shi, and Z. G. Wu, “Event-based secure consensus of mutiagent systems against DoS attacks,” IEEE Trans. Cybernetics, Jun. 2019.
|
| [26] |
Z. Feng and G. Q. Hu, “Secure cooperative event-triggered control of linear multiagent systems under DoS attacks,” IEEE Trans. Control Systems Technology, 2019.
|
| [27] |
B. Kiumarsi and F. L. Lewis, “Output synchronization of heterogeneous discrete-time systems: A model-free optimal approach,” Automatica, vol. 84, pp. 86–94, 2017. doi: 10.1016/j.automatica.2017.07.004
|
| [28] |
H. Modares, S. P. Nageshrao, G. A. D. Lopes, R. Babuška, and F. L. Lewis, “Optimal model-free output synchronization of heterogeneous systems using off-policy reinforcement learning,” Automatica, vol. 71, pp. 334–341, 2016. doi: 10.1016/j.automatica.2016.05.017
|
| [29] |
N. Wang and X. J. Li, “Optimal output synchronization control of a class of complex dynamical networks with partially unknown system dynamics,” IEEE Trans. Systems, Man, and Cybernetics: Systems, 2018.
|
| [30] |
Y. W. Cao, G. H. Yang, and X. J. Li, “Optimal synchronization controller design for complex dynamical networks with unknown system dynamics,” J. Franklin Institute, vol. 356, no. 12, pp. 6071–6086, 2019. doi: 10.1016/j.jfranklin.2018.11.054
|
| [31] |
M. Y. Li and Z. S. Shuai, “Global-stability problem for coupled systems of differential equations on networks,” J. Differential Equations, vol. 248, no. 1, pp. 1–20, 2010. doi: 10.1016/j.jde.2009.09.003
|
| [32] |
H. Zhang, P. Cheng, L. Shi, and J. M. Chen, “Optimal denial-of-service attack scheduling with energy constraint,” IEEE Trans. Autom. Control, vol. 60, no. 11, pp. 3023–3028, 2015. doi: 10.1109/TAC.2015.2409905
|
| [33] |
H. Zhang, P. Cheng, L. Shi, and J. M. Chen, “Optimal DoS attack scheduling in wireless networked control system,” IEEE Trans. Control Systems Technology, vol. 24, no. 3, pp. 834–852, 2016.
|
| [34] |
F. L. Lewis, D. Vrabie, and V. Syrmos, Optimal Control, 3rd edition, New York: Wiley, 2012.
|
| [35] |
D. Kleinman, “On an iterative technique for Riccati equation computations,” IEEE Trans. Autom. Control, vol. 13, no. 1, pp. 114–115, 1968. doi: 10.1109/TAC.1968.1098829
|
| [36] |
Y. Jiang and Z. P. Jiang, “Computational adaptive optimal control for continuous-time linear systems with completely unknown dynamics,” Automatica, vol. 48, pp. 2699–2704, 2012. doi: 10.1016/j.automatica.2012.06.096
|
| [37] |
H. K. Khalil, Nonlinear Systems, 3rd edition, Prentice Hall, Englewood Cliffs, NJ, 2003.
|
| [1] | Hongxing Xiong, Guangdeng Chen, Hongru Ren, Hongyi Li. Broad-Learning-System-Based Model-Free Adaptive Predictive Control for Nonlinear MASs Under DoS Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 381-393. doi: 10.1109/JAS.2024.124929 |
| [2] | Lifu Wang, Zhaofei Li, Ge Guo, Zhi Kong. Target Controllability of Multi-Layer Networks With High-Dimensional Nodes[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(9): 1999-2010. doi: 10.1109/JAS.2023.124152 |
| [3] | Rong Zhao, Jun-e Feng, Dawei Zhang. Self-Triggered Set Stabilization of Boolean Control Networks and Its Applications[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1631-1642. doi: 10.1109/JAS.2023.124050 |
| [4] | Tao Wang, Qiming Chen, Xun Lang, Lei Xie, Peng Li, Hongye Su. Detection of Oscillations in Process Control Loops From Visual Image Space Using Deep Convolutional Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 982-995. doi: 10.1109/JAS.2023.124170 |
| [5] | Xiaoting Du, Lei Zou, Maiying Zhong. Set-Membership Filtering Approach to Dynamic Event-Triggered Fault Estimation for a Class of Nonlinear Time-Varying Complex Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 638-648. doi: 10.1109/JAS.2023.124119 |
| [6] | Meng Li, Zhigang Zeng. Nested Saturated Control of Uncertain Complex Cascade Systems Using Mixed Saturation Levels[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1163-1174. doi: 10.1109/JAS.2023.124176 |
| [7] | Dan Wang, Wei Chen, Li Qiu. The First Five Years of a Phase Theory for Complex Systems and Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(8): 1728-1743. doi: 10.1109/JAS.2024.124542 |
| [8] | Yao Cui, Pei Cheng, Xiaohua Ge. Exponential Synchronization of Delayed Stochastic Complex Dynamical Networks via Hybrid Impulsive Control[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 785-787. doi: 10.1109/JAS.2023.123867 |
| [9] | Lifu Wang, Zhaofei Li, Lianqian Cao, Ge Guo, Zhi Kong. Controllability of Multi-Relational Networks With Heterogeneous Dynamical Nodes[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(12): 2476-2486. doi: 10.1109/JAS.2024.124404 |
| [10] | Xiuyang Chen, Changbing Tang, Zhao Zhang. A Game Theoretic Approach for a Minimal Secure Dominating Set[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(12): 2258-2268. doi: 10.1109/JAS.2023.123315 |
| [11] | Chengze Jiang, Xiuchun Xiao. Norm-Based Adaptive Coefficient ZNN for Solving the Time-Dependent Algebraic Riccati Equation[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(1): 298-300. doi: 10.1109/JAS.2023.123057 |
| [12] | Lifu Wang, Zhaofei Li, Guotao Zhao, Ge Guo, Zhi Kong. Input Structure Design for Structural Controllability of Complex Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(7): 1571-1581. doi: 10.1109/JAS.2023.123504 |
| [13] | Xiaohua Ge, Qing-Long Han, Qing Wu, Xian-Ming Zhang. Resilient and Safe Platooning Control of Connected Automated Vehicles Against Intermittent Denial-of-Service Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1234-1251. doi: 10.1109/JAS.2022.105845 |
| [14] | Wenli Duso, MengChu Zhou, Abdullah Abusorrah. A Survey of Cyber Attacks on Cyber Physical Systems: Recent Advances and Challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(5): 784-800. doi: 10.1109/JAS.2022.105548 |
| [15] | Lulu Chen, Lei Shi, Quan Zhou, Hanmin Sheng, Yuhua Cheng. Secure Bipartite Tracking Control for Linear Leader-Following Multiagent Systems Under Denial-of-Service Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(8): 1512-1515. doi: 10.1109/JAS.2022.105758 |
| [16] | Lei Liu, Lifeng Ma, Jie Zhang, Yuming Bo. Sliding Mode Control for Nonlinear Markovian Jump Systems Under Denial-of-Service Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(6): 1638-1648. doi: 10.1109/JAS.2019.1911531 |
| [17] | Zhen Hong, Rui Wang, Xile Li. A Clustering-tree Topology Control Based on the Energy Forecast for Heterogeneous Wireless Sensor Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 68-77. |
| [18] | Xiaojuan Chen, Jun Zhang, Tiedong Ma. Parameter Estimation and Topology Identification of Uncertain General Fractional-order Complex Dynamical Networks with Time Delay[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(3): 295-303. |
| [19] | Yongsong Wei, Shaoyuan Li. Water Supply Networks as Cyber-physical Systems and Controllability Analysis[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 313-319. |
| [20] | Yumei Li, Holger Voos, Mohamed Darouach, Changchun Hua. An Algebraic Detection Approach for Control Systems under Multiple Stochastic Cyber-attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 258-266. |

Figures(11)




Ning Wang and Xiaojian Li, "Secure Synchronization Control for a Class ofCyber-Physical Systems WithUnknown Dynamics," IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1215-1224, Sept. 2020. doi: 10.1109/JAS.2020.1003192
 DownLoad:
DownLoad:
















































































































































































































































































































 DownLoad:
DownLoad:









