
























































































































































































































































Figure
1.
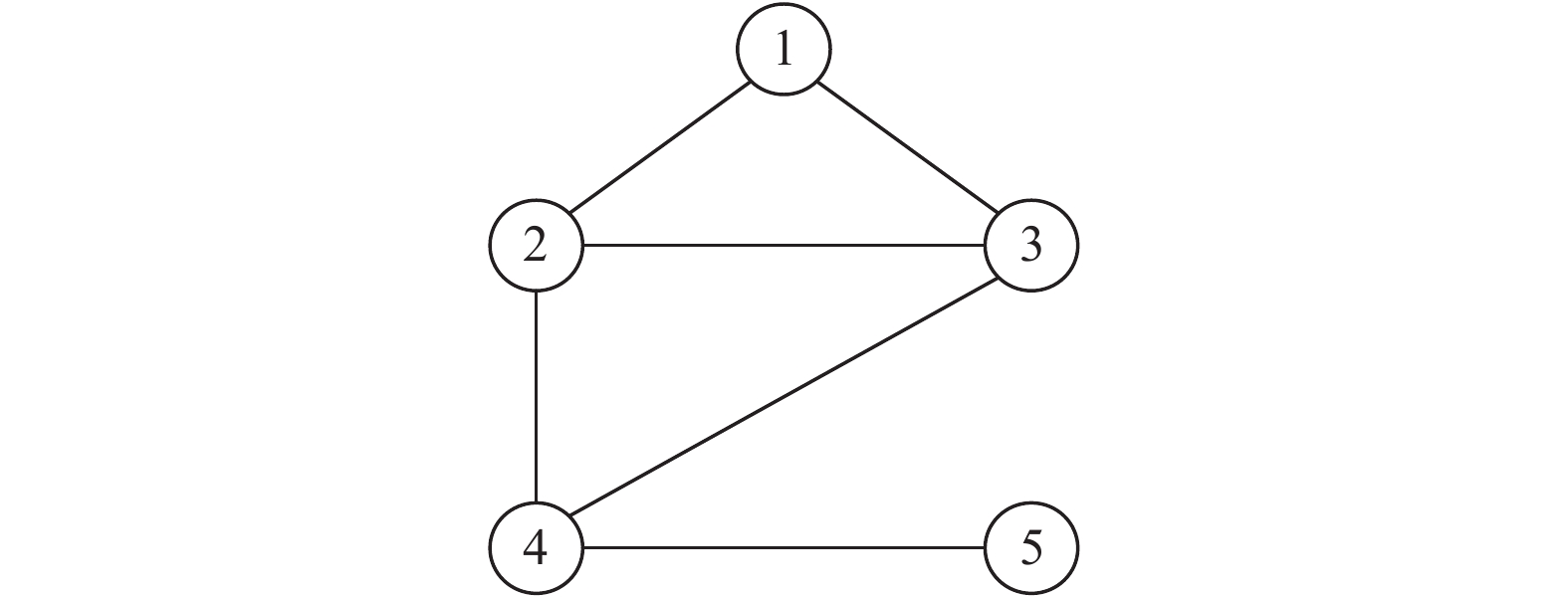
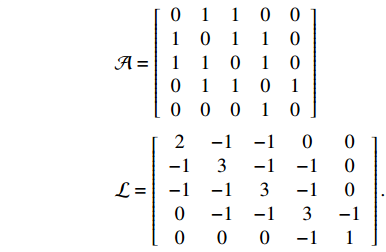
Topology of the considered MAS.
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
| Citation: | Yanxu Su, Qingling Wang and Changyin Sun, "Self-triggered Consensus Control for Linear Multi-agent Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 150-157, Jan. 2020. doi: 10.1109/JAS.2019.1911837

|
IN recent years, the consensus problem has attracted increasing attention in the research of multi-agent systems (MASs) as it is the core problem in cooperative control, tracking control, formation control [1]–[8], etc. Most of the existing literature studied the consensus problem for the MASs which were described by single-integrator or double-integrator dynamical models [9]. However, due to the requirements of practical applications, it is of great interest to investigate the consensus problem for a class of MASs which can be formulated as general linear models [10].
Each agent in the MASs is controlled by a micro-controller in a practical scenario. It should be considered that each agent obtains the consensus error by measuring the information from its neighbors with limited communication and computational resources. In [1], motivated by the use of embedded micro-controllers with limited resources, the authors proposed an event-triggered control scheme based on the ratio between the measurement error and the sampled state. The event-driven control strategy has been considerably studied for its capability of reducing the consumption of computational resources and communication frequency which must be taken into account during controller design for the practical system. Many celebrated results on event-driven control have been developed, see for example, [11]–[16]. The authors in [17] exploited the event-triggered zero-order-hold (ZOH) in the framework of sliding mode control for stochastic systems. The event-triggered communication approach was adopted in [18] to optimize the utilization of communication resources. In [19], a self-triggered scheme was developed via model predictive control in the context of nonlinear systems. The triggering condition was designed by guaranteeing the objective function to be decaying.
Moreover, physical constraints are ubiquitous in practical systems, i.e., input saturation [20], output bounded [21], state constraint [22], etc. Thus, it should be taken into account in the controller design. Otherwise, it may lead to nonlinearities in the linear systems which will induce the performance degradation of closed-loop systems, and even loss of stability. Many efforts have been devoted to the theoretical analysis of saturation, see for example, [23]–[27]. In [28], the authors adopted a boundary control strategy in handling input nonlinearities and unknown external disturbances for a class of flexible riser systems. The authors of [29] utilized a radial-basis-function (RBF) neural network to approximate system uncertainties, with which the closed-loop system was shown to be semi-global uniformly ultimately bounded. However, most of existing literature took the continuous-time systems into consideration, while the discrete-time model should be studied when the micro-controller is adopted. In addition, event-driven control should be studied to reduce computational resources used in fulfilling the physical constraints. In recent decades, this has attracted tremendous attention, and several results have been presented. In [30], a distributed event-triggered control strategy was provided for global consensus of MASs which can be formulated as a linear system subject to input saturation. In [31], the authors investigated an output-based event-triggered control scheme for linear systems with actuator saturation. An anti-windup compensator and an event generator were designed to overcome saturation. The authors presented an event-triggered controller in [32] taking the actuator saturation and anti-windup compensation into consideration. In [33], the authors studied the event-triggered control problem for a class of linear systems with actuator saturation and additive disturbances. Some sufficient conditions were given for synthesis of the proposed controller and event-triggered control problem to maximize the estimation of the domain of attraction (DOA). Many of the published works exploited the event-triggered condition based on the relationship between state error and sampled state. In general, it should be checked according to the sampling interval in discrete-time systems in the context of an event-driven mechanism. However, a violation of the triggering condition may occur between adjacent sampling instants, which may lead to instability of the system in the presence of time delay. In [34], both event- and self-triggered transmission schemes were proposed for dynamic systems subject to actuator saturation. Distinct from the event-triggered mechanism, self-triggered control was proposed to determine the triggering interval between the adjacent triggers at each triggering instant. A self-triggered mechanism is of great interest for its use in saturated system controller design. It is worth noting that the triggering condition is obtained based on current sampled data without checking the states of the system at each sampling instant, which implies computational resources could be significantly reduced.
It should be mentioned that consensus problems for the MASs formulated by linear models are worth being studied in practice. In the discrete-time context, input saturation is taken into account in controller design. In addition, from a practical perspective, we adopt a self-triggered mechanism to reduce computational resources.
In this paper, a self-triggered consensus strategy is proposed for a class of general linear MASs subject to input saturation in the context of discrete-time dynamics. The main contributions of this paper are summarized in the following.
The rest of this paper is organized as follow: Section II presents some crucial preliminaries for the theoretical analysis and formulates the considered problem in this paper. Section III designs the self-triggered consensus strategy and gives the convex optimization problem to determine the time interval before the next trigger. Moreover, some sufficient conditions are proposed in LMIs form to maximize DOA under the proposed controller. Meanwhile, the gain matrix in the consensus protocol is obtained by the controller synthesis. The simulation results are given in Section IV to verify the effectiveness of the theoretical results. Section V concludes this paper.
To describe the considered consensus problem in this paper, we briefly recap some definitions on graph theory in this section. Thereafter, we formulate the self-triggered consensus problem for linear MASs. In addition, some crucial definitions and lemmas are given for controller design.
We adopt the following notations throughout this paper: The labels
An algebraic graph
Consider the MASs containing
| ˙xi(t)=Axi(t)+Bsat(ui(t)) | (1) |
where
| sat(uil)={sign(uil),|uil|>1uil,|uil|≤1 | (2) |
where
Remark 1: It is worth mentioning that if linear systems are formulated by
| ˙xi(t)=Axi(t)+B∗sat∗(ui(t)) | (3) |
where
| sat∗(ui(t))=[sat∗(ui1(t)),…,sat∗(uim(t))]T | (4) |
with arbitrary saturation value for each input signal, it can be transformed into form (1) whose input is bounded by
| ˙xi(t)=Axi(t)+m∑l=0b∗lsat∗(uil(t)). | (5) |
Then we can obtain the following system:
| ˙xi(t)=Axi(t)+m∑l=0(b∗l˜uil(t))sat∗(uil(t))˜uil(t) | (6) |
which shows
The closed-loop control system should be taken into account in the context of a discrete-time system according to the sampling controller, so that the system in (1) can be discretized [13]. Suppose the sampled interval be
| xi(k+1)=Φxi(k)+Γsat(ui(k)) | (7) |
where
| Φ=eAT,Γ=∫T0eAsdsB. |
For the consensus problem of MASs, denote the consensus error in the following:
| ξi(k)=∑j∈Niaij(xi(k)−xj(k)). | (8) |
In this paper, the consensus protocol
| ui(k)=Kξi(kst) | (9) |
for
Definition 1 [37]: The MASs with each agent formulated in (1) is said to be reaching a consensus, if
| limk→∞‖xi(k)−xj(k)‖=0,k∈N+ | (10) |
for any initial value
| ε(P,ρ)={ξi∈Rn:ξTiPξi≤ρ} | (11) |
with
By denoting
| ξ(k+1)=Φcξ(k)+Γcsat(Kcξ(kst)) | (12) |
where
To tackle the input saturation in the controller design, the DOA is exploited. Some definitions and lemmas are given in the following for investigating the DOA of system (12).
Definition 2 [36]: In terms of the saturation, a matrix is given as
| Θ(F):={ξi∈Rn:|fqξi|≤1,q∈Im={1,…,m}}. | (13) |
Definition 3 [38]: A set
Definition 4 [39]: For the initial state
| S={ξ0∈Rn|limt→∞ζ(t,ξ0)=0}. | (14) |
Definition 5 [40]: Let
Moreover, some crucial lemmas are recapped as follows for the theoretical analysis in this paper.
Lemma 1 [41]: Let
| sat(ϑ)∈co{Esϑ+E−sφ:s∈I2m} |
where
Lemma 2 [42]: For a given ellipsoid
| (1fq∗P/ρ)≥0,∀q∈Im. | (15) |
In this section, a self-triggered strategy is presented, and the triggering condition is given based on the sampled states. Meanwhile, a convex optimization problem is constructed for determining the time interval before next trigger according to the triggering condition. Thereafter, we propose a method to design the feedback gain to stabilize the system in (12), which implies that the MASs can be guaranteed to reach consensus within the maximum triggered interval.
For the closed-loop system in (12), define the consensus error between two adjacent sampling instants by the following form:
| δ(k)=ξ(k)−ξ(kst) | (16) |
where
| kst+1=kst+maxν>0{ν∈N+∣δ(kst+ν)2≤ηξ(kst)2} | (17) |
where
For
| δ(k+1)=Φcδ(k)+[(Φc−IM⊗In)ξ(kst)+Γcsat(Kcξ(kst))] | (18) |
with
| δ(k)=Ξ(kst)⋅(Φk−kstc−IM⊗In)(Φc−IM⊗In)−1 | (19) |
where
| Ξ(kst)=(Φc−IM⊗In)ξ(kst)+Γcsat(Kcξ(kst)) | (20) |
is a constant matrix. Thereafter, one can get
| δ(kst+ν)2=((Φνc−IM⊗In)(Φc−IM⊗In)−1)T×Ξ(kst)TΞ(kst)×((Φνc−IM⊗In)(Φc−IM⊗In)−1)≤(¯λ(Φc)ν−1λ_(Φc)−1)2ψ(kst) | (21) |
where
| ψ(kst)=Ξ(kst)TΞ(kst). | (22) |
Thus, the self-triggered condition in (17) can be rewritten as follows:
| ν=argmaxν∈N+{(¯λ(Φc)ν−1λ_(Φc)−1)2ψ(kst)≤ηξ(kst)2}. | (23) |
Remark 2: It is worth to mention that (23) is equivalent to
| max ν∈N+s.t. ν≤log¯λ(Φc)[1+(λ_(Φc)−1)(ηξ(kst)2ψ(kst))12] | (24) |
where
From the above, a self-triggered condition is proposed to design a state feedback controller for the closed-loop system subject to bounded inputs. One problem is to show that the given ellipsoid is positively invariant and the other is to find the DOA based on the given positively invariant set. From the definition of DOA and positively invariant set, the DOA has the largest volume if
Theorem 1: Given a state feedback control gain matrix
| (˜P0ΦTsI∗αIΩTsΓTc0∗∗˜P−10∗∗∗β−1I)>0 | (25) |
where
| (1fq∗P/ρ)≥0,∀q∈Im. | (26) |
Proof: In accordance with Definition 3 on a positively invariant set, define the Lyapunov function in a quadratic form as follows:
| V(ξ)=ξ(k)T(IM⊗P)ξ(k). | (27) |
The difference of
| ΔV(ξ)=V(ξ(k+1))−V(ξ(k)) | (28) |
which should satisfy
| ΔV(ξ)=ξ(k+1)T˜Pξ(k+1)−ξ(k)T˜Pξ(k)=(Φcξ(k)+Γcsat(Kcξ(kst)))T˜P(Φcξ(k)+Γcsat(Kcξ(kst)))−ξ(k)T˜Pξ(k)<0 | (29) |
where
| ˜P=IM⊗P,∀ξi∈ε(P,ρ)∖{0}. | (30) |
It is worth noting that
| |fqξi(kst)|≤1,∀ξi(kst)∈ε(P,ρ),q∈Im. |
In light of Lemma 1, one can have
| sat(Kcξ(kst))∈co{(IM⊗Es)Kcξ(kst)+(IM⊗E−s)(IM⊗F)ξ(kst):s∈I2m}. | (31) |
Therefore, inspired by the closed-loop system in (12), the following expression can be deduced
| Φcξ(k)+Γcsat(Kcξ(kst))∈co{Φcξ(k)+ΓcΩsξ(kst):s∈I2m} | (32) |
where
| Ωs=(IM⊗Es)Kc+(IM⊗E−s)(IM⊗F). | (33) |
Then we can obtain
| (Φcξ(k)+Γcsat(Kξ(kst)))T˜P(Φcξ(k)+Γcsat(Kξ(kst)))≤maxs∈I{(Φcξ(k)+ΓcΩsξ(kst))T˜P(Φcξ(k)+ΓcΩsξ(kst))} | (34) |
according to the property of a convex hull. To prove (29), it is sufficient to prove that
| (Φcξ(k)+ΓcΩsξ(kst))T˜P(Φcξ(k)+ΓcΩsξ(kst))−ξ(k)T˜Pξ(k)<0,∀s∈I2m. | (35) |
As the consensus error in this paper defined in (16) is satisfied when it triggers, (35) can be rewritten in the following form:
| (ξ(k)δ(k))TP1(ξ(k)δ(k))>0 | (36) |
with
| P1=(−ΦTs˜PΦs+˜P−ΦTs˜PΓcΩs∗−ΩTsΓTc˜PΓcΩs) | (37) |
by letting
| Ωs=(IM⊗Es)Kc+(IM⊗E−s)(IM⊗F) |
and
| Φs=Φc+Ωs, ∀s∈I2m. | (38) |
In terms of the self-triggered condition designed in (17), we have
| (ξ(k)δ(k))TP2(ξ(k)δ(k))<0 | (39) |
with
| P2=(ηI00−I) | (40) |
where
| P3=(−ΦTs˜PΦs+˜P−αηI−ΦTs˜PΓcΩs∗−ΩTsΓTc˜PΓcΩs+αI)>0. | (41) |
Thus, (41) can be rewritten as follows via Schur’s complement.
| (˜P0ΦTsI∗αIΩTsΓTc0∗∗˜P−10∗∗∗(αη)−1I)>0. | (42) |
Letting
In what follows, one problem is determining how to enlarge the volume of DOA by designing an appropriate
Theorem 2: The volume of the ellipsoid mentioned in Theorem 1 can be maximized by solving the LMIs optimization problem as follows:
| minZ,W−logdet(Z)s.t.(˜Z0˜ZTΦTc+(Ωs˜Z)TΓTc˜Z∗2˜Z−α−1I(Ωs˜Z)TΓTc0∗∗˜Z0∗∗∗β−1I)>0 | (43) |
| (1wq∗Z)≥0,∀q∈Im | (44) |
where
| ˜Z=IM⊗Z |
| Ωs˜Z=[(IM⊗Es)Kc+(IM⊗E−s)(IM⊗F)]Z=(IM⊗Es)(IM⊗Y)+(IM⊗E−s)(IM⊗W) |
and letting
| P=Z−1,K=YP. |
Proof: In light of (25), by pre- and post-multiplying a diagonal matrix
| (˜P−10˜P−1ΦTs˜P−1∗α˜P−1˜P−1ΩTsΓTc0∗∗˜P−10∗∗∗β−1I)>0. | (46) |
Substitute
| (α−1I−˜P−1)TαI(α−1I−˜P−1)≥0 | (47) |
which is equivalent to
| α˜P−1˜P−1≥2˜P−1−α−1I. | (48) |
Thus, (46) can be rewritten as follows:
| (˜Z0˜ZTΦTc+(Ωs˜Z)TΓTc˜Z∗2˜Z−α−1I(Ωs˜Z)TΓTc0∗∗˜Z0∗∗∗β−1I)>0 | (49) |
where
| ˜Z=IM⊗Z |
| Ωs˜Z=[(IM⊗Es)Kc+(IM⊗E−s)(IM⊗F)]Z=(IM⊗Es)(IM⊗KP−1)+(IM⊗E−s)(IM⊗FP−1). |
Letting
Remark 3: It is worth pointing out that we should maximize
According to the proposed self-triggered consensus approach, Algorithm
Algorithm 1 self-triggered consensus for mass with input saturation
Required:
1: Solve the optimization problem in (43) and (44) to obtain
2: while
3: if
4: Solve the optimization problem in (24) to obtain the time interval
5: end if;
6: while
7: Obtain the consensus error
8: Apply the consensus control law (9) to system in (1);
9: Move instant
10: end while;
11: Solve the optimization problem in (24) to obtain the time interval
12: Move triggered index
13: end while
Remark 4: It is worth to mention that, for a given practical system, the sampling interval
In this section, a numerical example is given to demonstrate the effectiveness of the theoretical analysis results.
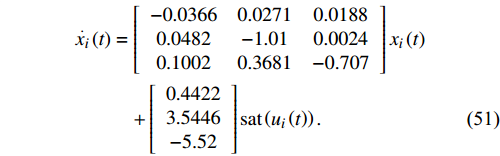
Consider the MASs containing five agents. Each agent in the considered MASs can be described in the following dynamical model:
| .xi(t)=[−0.03660.02710.01880.0482−1.010.00240.10020.3681−0.707]xi(t)+[0.44223.5446−5.52]sat(ui(t)). | (51) |
The communication topology is shown in Fig. 1. The adjacent matrix can be obtained according to the communication graph in which the weight of each edge is assumed to be 1. Thereafter, we can get the corresponding Laplacian matrix.
| A=[0110010110110100110100010]L=[2−1−100−13−1−10−1−13−100−1−13−1000−11]. |
The sampling interval is T = 0.001s, the parameters in the triggering condition (17) is defined as
| P=[0.3014−0.1166−0.1124−0.11660.2961−0.1105−0.1124−0.11050.2925]. |
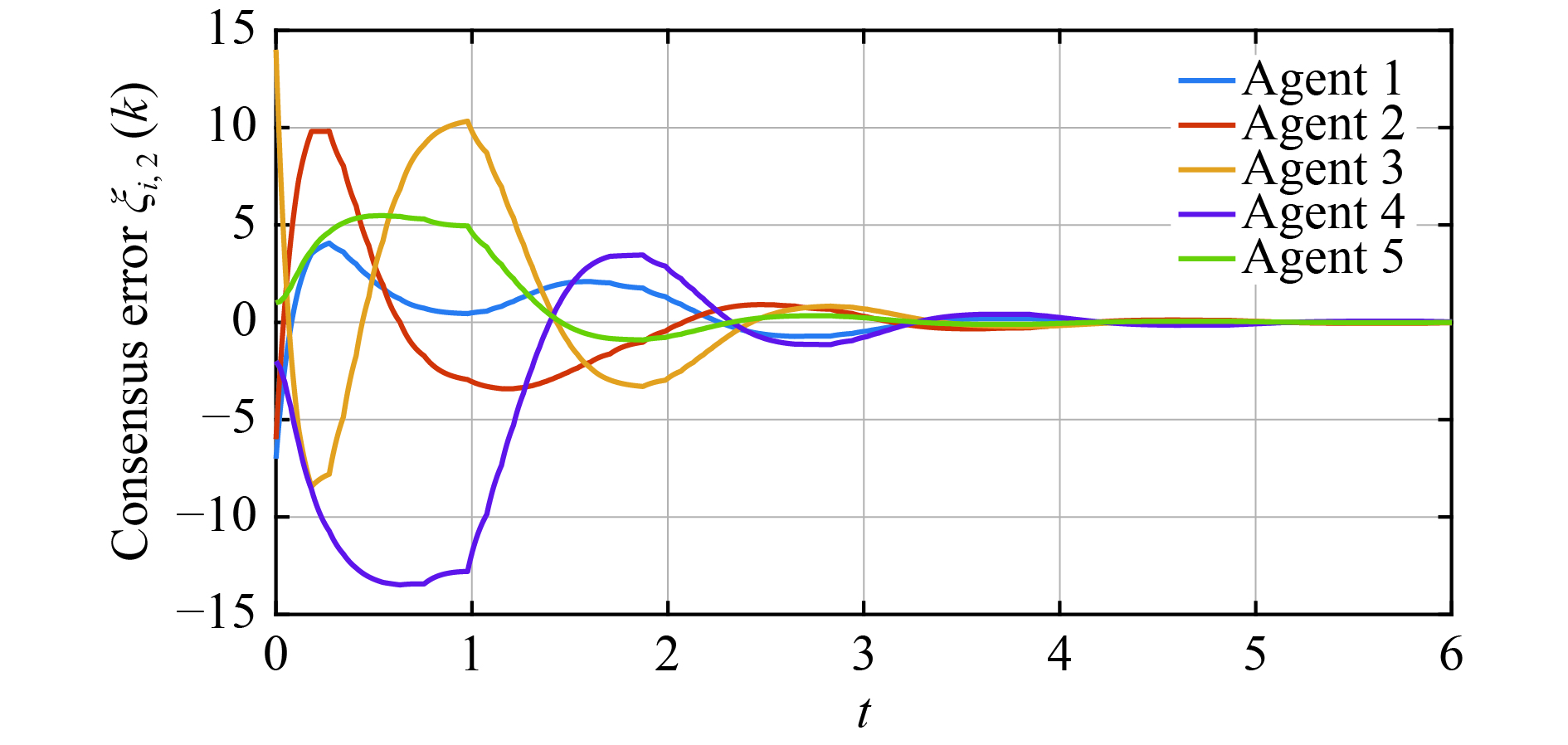
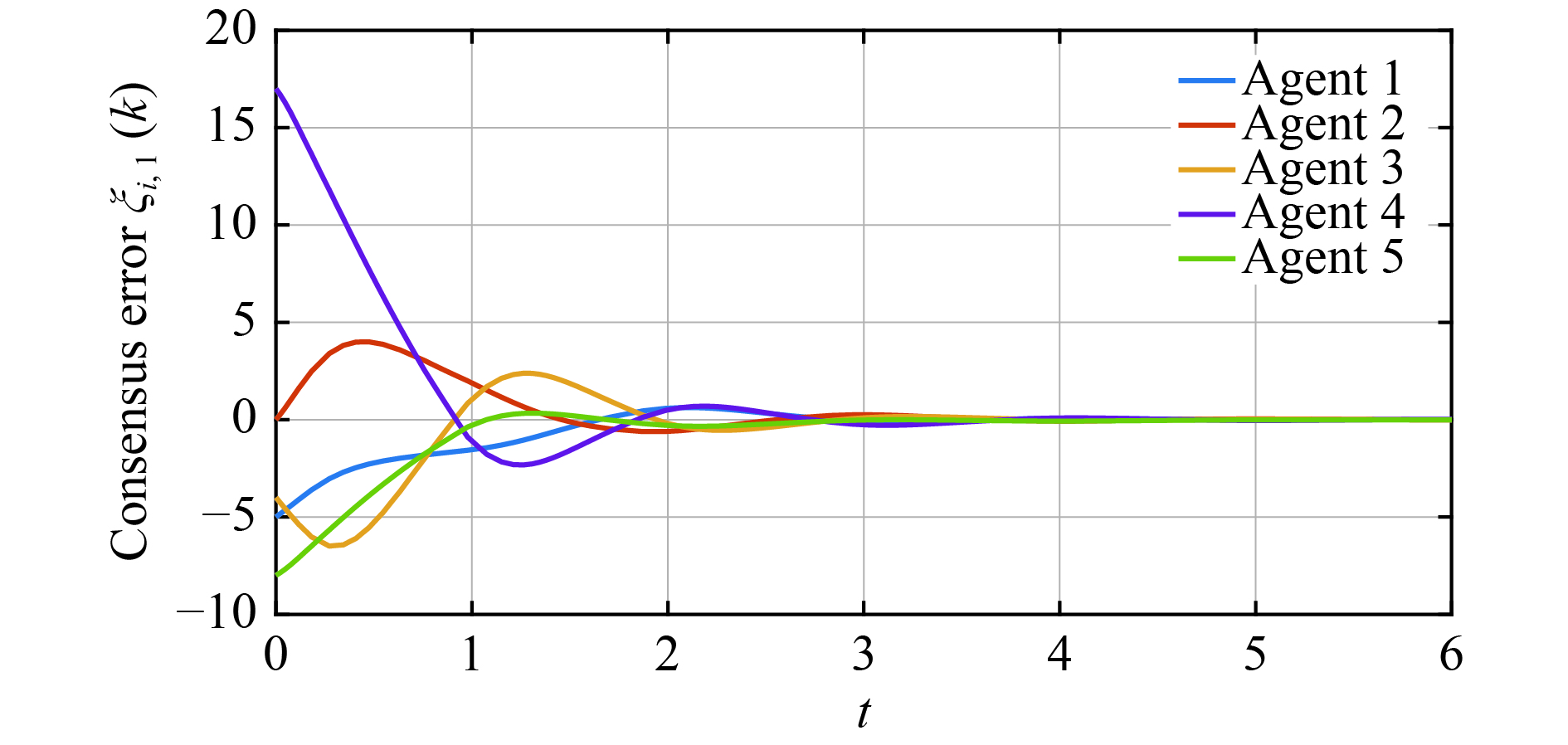
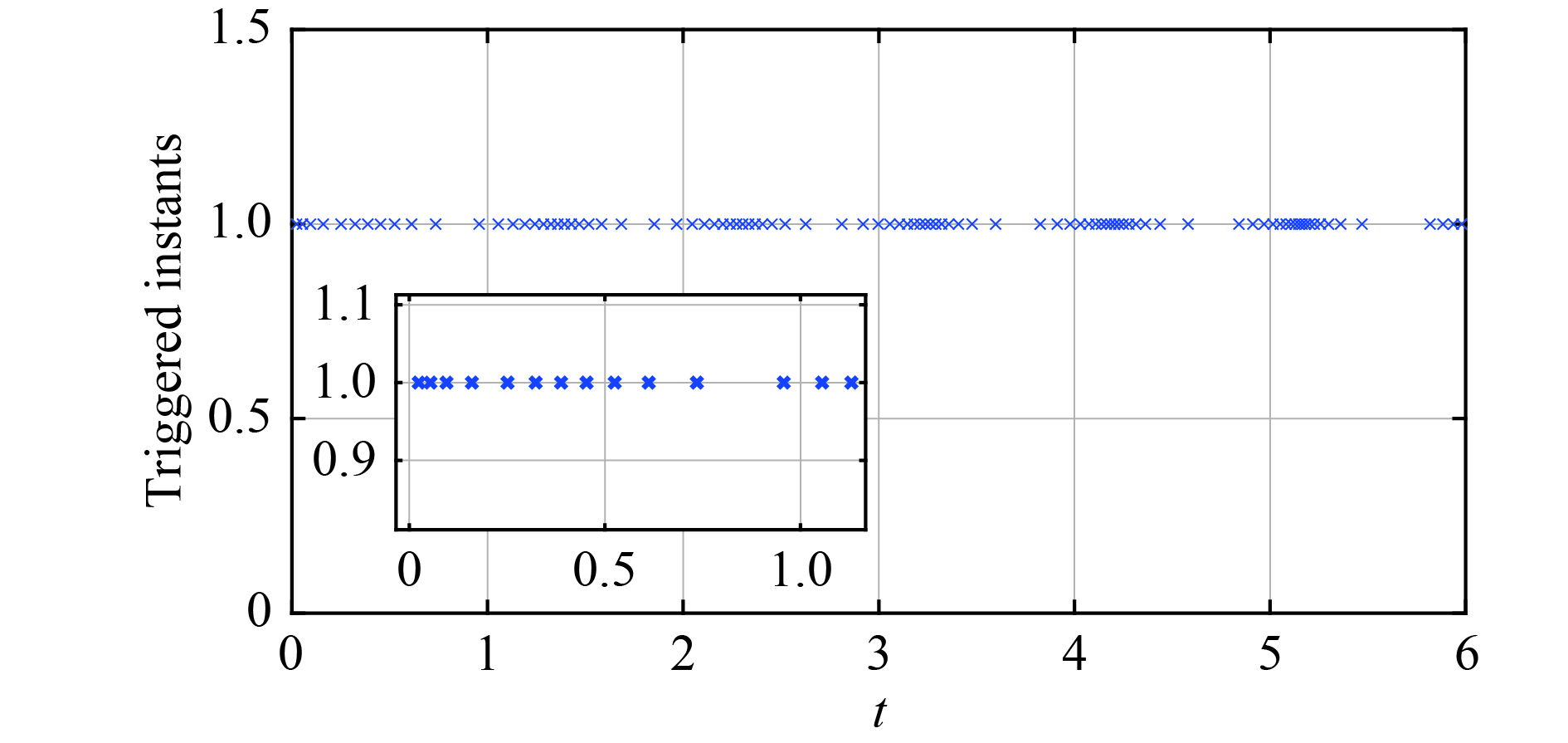
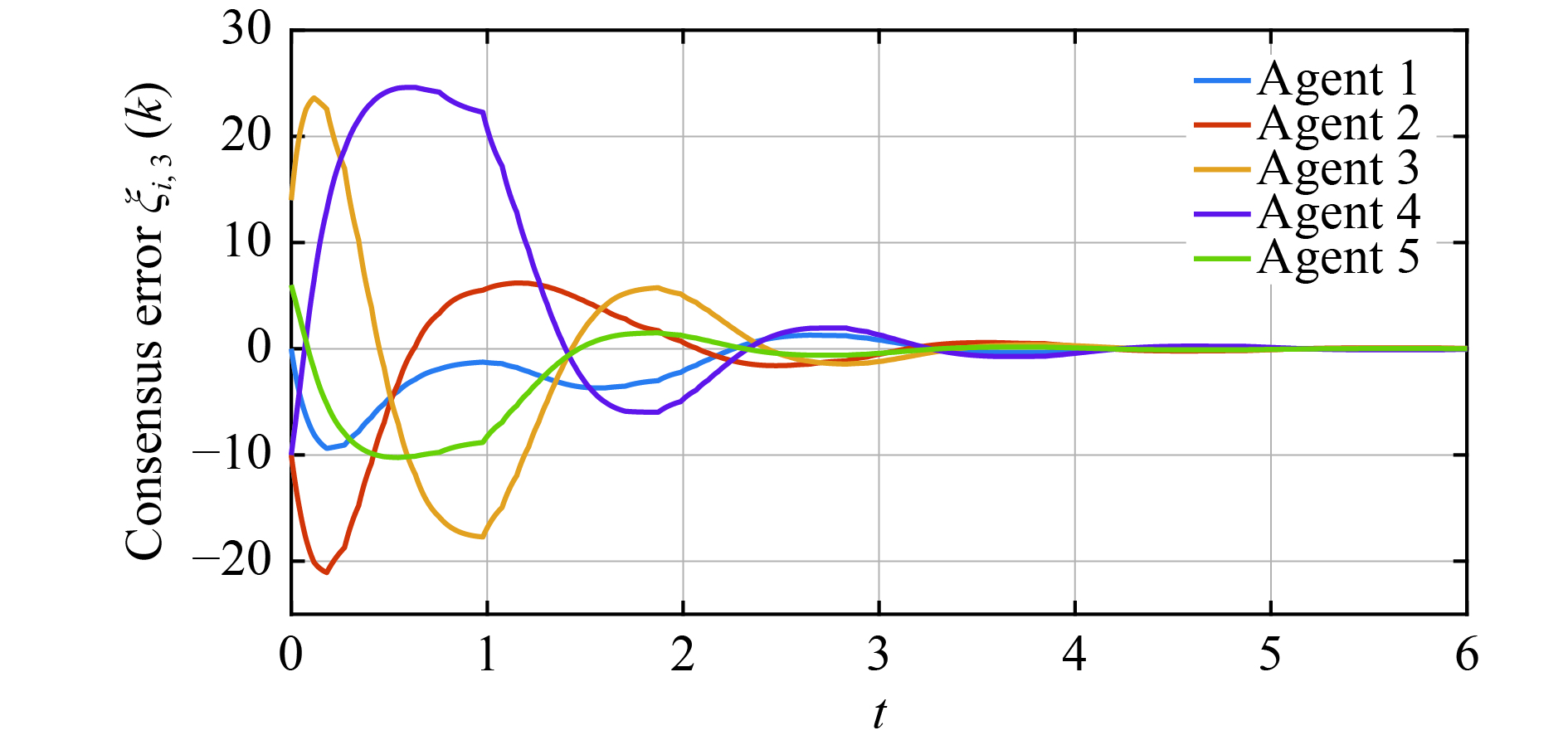
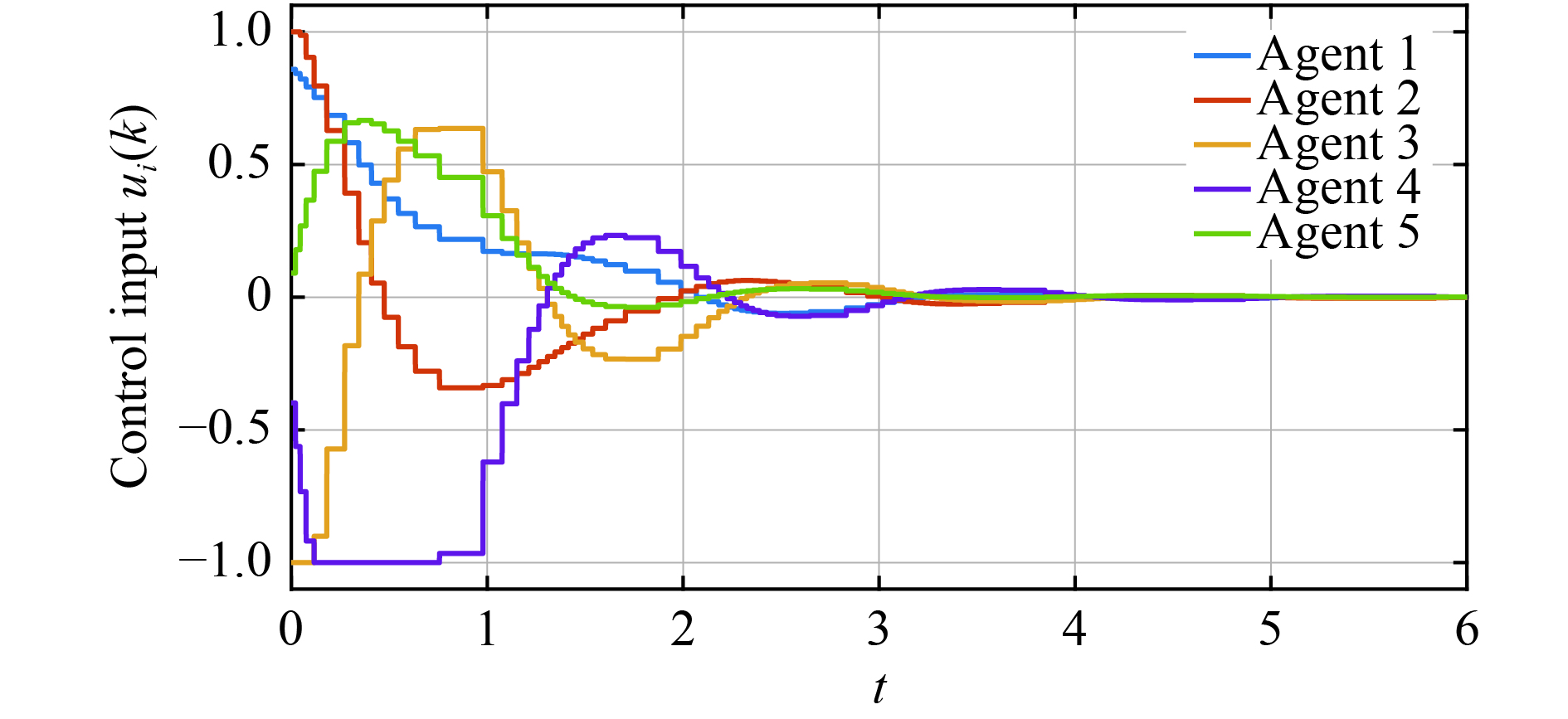
The simulation is conducted by following Algorithm 1, and the results are reported in Figs. 2-6. It is seen in Figs. 2-4 that the consensus errors of each state converge to zero as time trends to infinity, which implies the considered MASs can reach consensus with the presented control protocol under the self-triggered mechanism. To demonstrate that the input saturation can be guaranteed, Fig. 5 gives the control input signals of each agent. It is shown that the input saturation of each agent is fulfilled during the simulation time horizon. Moreover, to reveal the effectiveness of the self-triggered mechanism, the triggering instants are plotted in Fig. 6. It is worth noting that the triggering count is significantly reduced according to Fig. 6. It is observed that the proposed self-triggered scheme can render the MASs to reach consensus with the triggered interval determined at each self-triggered instant.
In this paper, a self-triggered consensus scheme is proposed and the controller synthesis approach is discussed for linear multi-agent systems subject to input saturation. Based on the changing rate of consensus error, the self-triggered strategy is exploited to reduce the communication burden. To find the maximum positively invariant ellipsoid with consideration of the input saturation, a sufficient condition is given in the form of LMIs. Thereafter, the feedback control gain of the presented self-triggered controller can be obtained. Moreover, a numerical example is given to verify the theoretical analysis results. The contribution of this paper is to present a self-triggered scheme which can handle the consensus problem of linear multi-agent systems with a digital micro-controller where the input signal is bounded with maximizing the DOA of the closed-loop multi-agent systems. Implementing the proposed algorithm in a practical system will be the subject of future works.
| [1] |
D. V. Dimarogonas, E. Frazzoli, and K. H. Johansson, " Distributed event-triggered control for multi-agent systems,” IEEE Trans. Automatic Control, vol. 57, no. 5, pp. 1291–1297, May 2012. doi: 10.1109/TAC.2011.2174666
|
| [2] |
X. Y. Meng, L. H. Xie, and Y. C. Soh, " Asynchronous periodic event-triggered consensus for multi-agent systems,” Automatica, vol. 84, pp. 214–220, Oct. 2017. doi: 10.1016/j.automatica.2017.07.008
|
| [3] |
H. Su, Z. Wang, Z. Song, and X. Chen, " Event-triggered consensus of nonlinear multi-agent systems with sampling data and time delay,” IET Control Theory and Applications, vol. 11, no. 11, pp. 1715–1725, Jul. 2016.
|
| [4] |
W. Ren, R. W. Beard, and E. M. Atkins, " Information consensus in multivehicle cooperative control,” IEEE Control Systems Magazine, vol. 27, no. 2, pp. 71–82, Apr. 2007. doi: 10.1109/MCS.2007.338264
|
| [5] |
W. Ren, H. Y. Chao, W. Bourgeous, N. Sorensen, and Y. Q. Chen, " Experimental validation of consensus algorithms for multivehicle cooperative control,” IEEE Trans. Control Systems Technology, vol. 16, no. 4, pp. 745–752, Jul. 2008. doi: 10.1109/TCST.2007.912239
|
| [6] |
L. F. Ma, Z. D. Wang, and H.-K. Lam, " Event-triggered mean-square consensus control for time-varying stochastic multi-agent system with sensor saturations,” IEEE Trans. Automatic Control, vol. 62, no. 7, pp. 3524–3531, Jul. 2016.
|
| [7] |
C. Shen, B. Buckham, and Y. Shi, " Modified C/GMRES algorithm for fast nonlinear model predictive tracking control of AUVs,” IEEE Trans. Control Systems Technology, vol. 25, no. 5, pp. 1896–1904, Sep. 2016.
|
| [8] |
C. Shen, Y. Shi, and B. Buckham, " Integrated path planning and tracking control of an AUV: a unified receding horizon optimization approach,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 3, pp. 1163–1173, Jun. 2016.
|
| [9] |
G. Ferrari-Trecate, L. Galbusera, M. P. E. Marciandi, and R. Scattolini, " Model predictive control schemes for consensus in multi-agent systems with single-and double-integrator dynamics,” IEEE Trans. Automatic Control, vol. 54, no. 11, pp. 2560–2572, Nov. 2009. doi: 10.1109/TAC.2009.2031208
|
| [10] |
H. P. Li and W. S. Yan, " Receding horizon control based consensus scheme in general linear multi-agent systems,” Automatica, vol. 56, no. C, pp. 12–18, Jun. 2015.
|
| [11] |
A. Selivanov and E. Fridman, " Event-triggered H∞ control: A switching approach,” IEEE Trans. Automatic Control, vol. 61, no. 10, pp. 3221–3226, Oct. 2016. doi: 10.1109/TAC.2015.2508286
|
| [12] |
W. Heemels, J. Sandee, and P. Van Den Bosch, " Analysis of event-driven controllers for linear systems,” Int. J. Control, vol. 81, no. 4, pp. 571–590, Apr. 2008. doi: 10.1080/00207170701506919
|
| [13] |
W. H. Heemels, M. Donkers, and A. R. Teel, " Periodic event-triggered control for linear systems,” IEEE Trans. Automatic Control, vol. 58, no. 4, pp. 847–861, Apr. 2013. doi: 10.1109/TAC.2012.2220443
|
| [14] |
W. Wu, S. Reimann, D. Gorges, and S. Liu, " Suboptimal eventtriggered control for time-delayed linear systems,” IEEE Trans. Automatic Control, vol. 60, no. 5, pp. 1386–1391, May 2015. doi: 10.1109/TAC.2014.2347214
|
| [15] |
L. Dong, X. N. Zhong, C. Y. Sun, and H. B. He, " Adaptive event-triggered control based on heuristic dynamic programming for nonlinear discrete-time systems,” IEEE Trans. Neural Networks and Learning Systems, vol. 28, no. 7, pp. 1594–1605, Jul. 2017. doi: 10.1109/TNNLS.2016.2541020
|
| [16] |
C. Hua, K. Li, and X. Guan, " Decentralized event-triggered control for interconnected time-delay stochastic nonlinear systems using neural networks,” Neurocomputing, vol. 272, pp. 270–278, Jan. 2017.
|
| [17] |
L. G. Wu, Y. B. Gao, J. X. Liu, and H. Y. Li, " Event-triggered sliding mode control of stochastic systems via output feedback,” Automatica, vol. 82, pp. 79–92, Aug. 2017. doi: 10.1016/j.automatica.2017.04.032
|
| [18] |
X. X. Liu, X. J. Su, P. Shi, S. K. Nguang, and C. Shen, " Fault detection filtering for nonlinear switched systems via event-triggered communication approach,” Automatica, vol. 101, pp. 365–376, Mar. 2019. doi: 10.1016/j.automatica.2018.12.006
|
| [19] |
Y. X. Su, Q. L. Wang, and C. Y. Sun, " Self-triggered robust model predictive control for nonlinear systems with bounded disturbances,” IET Control Theory and Applications, vol. 13, no. 9, pp. 1336–1343, Jun. 2019.
|
| [20] |
J. H. Qin, W. M. Fu, W. X. Zheng, and H. J. Gao, " On the bipartite consensus for generic linear multiagent systems with input saturation,” IEEE Trans. Cybernetics, vol. 47, no. 8, pp. 1948–1958, Aug. 2017. doi: 10.1109/TCYB.2016.2612482
|
| [21] |
X. Y. He, W. He, J. Shi, and C. Y. Sun, " Boundary vibration control of variable length crane systems in two-dimensional space with output constraints,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 5, pp. 1952–1962, Oct. 2017. doi: 10.1109/TMECH.2017.2721553
|
| [22] |
D. H. Nguyen, T. Narikiyo, and M. Kawanishi, " Robust consensus analysis and design under relative state constraints or uncertainties,” IEEE Trans. Automatic Control, vol. 63, no. 6, pp. 1784–1790, Jun. 2018. doi: 10.1109/TAC.2017.2752843
|
| [23] |
T. Yang, Z. Y. Meng, D. V. Dimarogonas, and K. H. Johansson, " Global consensus for discrete-time multi-agent systems with input saturation constraints,” Automatica, vol. 50, no. 2, pp. 499–506, Feb. 2014. doi: 10.1016/j.automatica.2013.11.008
|
| [24] |
S. Tarbouriech, C. Prieur, and J. M. G. Da Silva, " Stability analysis and stabilization of systems presenting nested saturation,” IEEE Trans. Automatic Control, vol. 51, no. 8, pp. 1364–1371, Aug. 2006. doi: 10.1109/TAC.2006.878743
|
| [25] |
L. Y. Sun, Y. Z. Wang, and G. Feng, " Control design for a class of affine nonlinear descriptor systems with actuator saturation,” IEEE Trans. Automatic Control, vol. 60, no. 8, pp. 2195–2200, Aug. 2015. doi: 10.1109/TAC.2014.2374712
|
| [26] |
N. Marchand and A. Hably, " Global stabilization of multiple integrators with bounded controls,” Automatica, vol. 41, no. 12, pp. 2147–2152, Dec. 2005. doi: 10.1016/j.automatica.2005.07.004
|
| [27] |
Q. L. Wang and C. Y. Sun, " Adaptive consensus of multiagent systems with unknown high-frequency gain signs under directed graphs,” IEEE Trans. Systems, Man, and Cybernetics: Systems, doi: 10.1109/TSMC.2018.2810089, 2018.
|
| [28] |
Z. J. Zhao, X. Y. He, Z. G. Ren, and G. L. Wen, " Boundary adaptive robust control of a flexible riser system with input nonlinearities,” IEEE Trans. Systems, Man, and Cybernetics: Systems, doi: 10.1109/TSMC.2018.2882734, 2018.
|
| [29] |
W. W. Bai, Q. Zhou, T. S. Li, and H. Y. Li, " Adaptive reinforcement learning neural network control for uncertain nonlinear system with input saturation,” IEEE Trans. Cybernetics, doi: 10.1109/TSMC.2019.2921057, 2019.
|
| [30] |
X. L. Yi, T. Yang, J. F. Wu, and K. H. Johansson, " Distributed eventtriggered control for global consensus of multi-agent systems with input saturation,” Automatica, vol. 100, pp. 1–9, Feb. 2019. doi: 10.1016/j.automatica.2018.10.032
|
| [31] |
Z. Z. Quan and D. Ma, " Output-based event-triggered control for linear systems with actuator saturation,” in Proc. Chinese Control and Decision Conf. (CCDC). Yinchuan, China, 2016, pp. 1500–1505.
|
| [32] |
G. A. Kiener, D. Lehmann, and K. H. Johansson, " Actuator saturation and anti-windup compensation in event-triggered control,” Discrete Event Dynamic Systems, vol. 24, no. 2, pp. 173–197, Jun. 2014. doi: 10.1007/s10626-012-0151-1
|
| [33] |
D. Liu and G. H. Yang, " Event-triggered control for linear systems with actuator saturation and disturbances,” IET Control Theory and Applications, vol. 11, no. 9, pp. 1351–1359, Jun. 2017.
|
| [34] |
Z. Q. Zuo, Q. S. Li, H. C. Li, and Y. B. Wang, " Event-triggered and self-triggered control for linear systems with actuator saturation,” Trans. Institute of Measurement and Control, vol. 40, no. 4, pp. 1281–1288, Feb. 2018. doi: 10.1177/0142331216680286
|
| [35] |
M. B. Lu and L. Liu, " Consensus of linear multi-agent systems subject to communication delays and switching networks,” Int. J. Robust and Nonlinear Control, vol. 27, no. 9, pp. 1379–1396, Jan. 2017.
|
| [36] |
W. Wu, S. Reimann, and S. Liu, " Event-triggered control for linear systems subject to actuator saturation,” IFAC Proceedings Volumes, vol. 47, no. 3, pp. 9492–9497, 2014. doi: 10.3182/20140824-6-ZA-1003.00255
|
| [37] |
L. Ding, Q.-L. Han, X. H. Ge, and X.-M. Zhang, " An overview of recent advances in event-triggered consensus of multiagent systems,” IEEE Trans. Cybernetics, vol. 48, no. 4, pp. 1110–1123, Apr. 2017.
|
| [38] |
Y.-Y. Cao, Z. L. Lin, and D. G. Ward, " An antiwindup approach to enlarging domain of attraction for linear systems subject to actuator saturation,” IEEE Trans. Automatic Control, vol. 47, no. 1, pp. 140–145, Jan. 2002. doi: 10.1109/9.981734
|
| [39] |
X. You, C. C. Hua, and X. P. Guan, " Event-triggered leader-following consensus for nonlinear multiagent systems subject to actuator saturation using dynamic output feedback method,” IEEE Trans. Automatic Control, vol. 63, no. 12, pp. 4391–4396, Dec. 2018. doi: 10.1109/TAC.2018.2817160
|
| [40] |
T. S. Hu, Z. L. Lin, and B. M. Chen, " Analysis and design for discrete-time linear systems subject to actuator saturation,” Systems and Control Letters, vol. 45, no. 2, pp. 97–112, Feb. 2002.
|
| [41] |
S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge University Press, 2004.
|
| [42] |
F. Z. Zhang, The Schur Complement and Its Applications. Springer Science and Business Media, 2005.
|
| [1] | Xian-Ming Zhang, Qing-Long Han, Xiaohua Ge, Bao-Lin Zhang. Accumulative-Error-Based Event-Triggered Control for Discrete-Time Linear Systems: A Discrete-Time Looped Functional Method[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(4): 683-693. doi: 10.1109/JAS.2024.124476 |
| [2] | Xuyang Wang, Dengxiu Yu, Xiaodi Li. Impulsive Consensus of MASs With Input Saturation and DoS Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 414-424. doi: 10.1109/JAS.2024.124944 |
| [3] | Meilin Li, Yue Long, Tieshan Li, Hongjing Liang, C. L. Philip Chen. Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 649-660. doi: 10.1109/JAS.2023.123582 |
| [4] | Rong Zhao, Jun-e Feng, Dawei Zhang. Self-Triggered Set Stabilization of Boolean Control Networks and Its Applications[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1631-1642. doi: 10.1109/JAS.2023.124050 |
| [5] | Xuerao Wang, Qingling Wang, Yanxu Su, Yuncheng Ouyang, Changyin Sun. Adaptive Sensor-Fault Tolerant Control of Unmanned Underwater Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 907-918. doi: 10.1109/JAS.2023.123837 |
| [6] | Heng Wang, Tengfei Zhang, Xiaoyu Zhang, Qing Li. Observer-Based Path Tracking Controller Design for Autonomous Ground Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 749-761. doi: 10.1109/JAS.2023.123078 |
| [7] | Hongru Ren, Hui Ma, Hongyi Li, Zhenyou Wang. Adaptive Fixed-Time Control of Nonlinear MASs With Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252-1262. doi: 10.1109/JAS.2023.123558 |
| [8] | Jingshu Sang, Dazhong Ma, Yu Zhou. Group-Consensus of Hierarchical Containment Control for Linear Multi-Agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(6): 1462-1474. doi: 10.1109/JAS.2023.123528 |
| [9] | Weihua Li, Huaguang Zhang, Yu Zhou, Yingchun Wang. Bipartite Formation Tracking for Multi-Agent Systems Using Fully Distributed Dynamic Edge-Event-Triggered Protocol[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(5): 847-853. doi: 10.1109/JAS.2021.1004377 |
| [10] | Yongliang Yang, Zhijie Liu, Qing Li, Donald C. Wunsch. Output Constrained Adaptive Controller Design for Nonlinear Saturation Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(2): 441-454. doi: 10.1109/JAS.2020.1003524 |
| [11] | Zhanjie Li, Jun Zhao. Adaptive Consensus of Non-Strict Feedback Switched Multi-Agent Systems With Input Saturations[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(11): 1752-1761. doi: 10.1109/JAS.2021.1004165 |
| [12] | Yang Yang, Jie Tan, Dong Yue. Prescribed Performance Control of One-DOF Link Manipulator With Uncertainties and Input Saturation Constraint[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 148-157. doi: 10.1109/JAS.2018.7511099 |
| [13] | Nassira Zerari, Mohamed Chemachema, Najib Essounbouli. Neural Network Based Adaptive Tracking Control for a Class of Pure Feedback Nonlinear Systems With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 278-290. doi: 10.1109/JAS.2018.7511255 |
| [14] | Mojtaba Naderi Soorki, Mohammad Saleh Tavazoei. Constrained Swarm Stabilization of Fractional Order Linear Time Invariant Swarm Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(3): 320-331. |
| [15] | Yanlong Zhou, Mou Chen, Changsheng Jiang. Robust Tracking Control of Uncertain MIMO Nonlinear Systems with Application to UAVs[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 25-32. |
| [16] | Hongjing Liang, Huaguang Zhang, Zhanshan Wang, Junyi Wang. Consensus Robust Output Regulation of Discrete-time Linear Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 204-209. |
| [17] | Huiyang Liu, Long Cheng, Min Tan, Zengguang Hou. Containment Control of General Linear Multi-agent Systems with Multiple Dynamic Leaders: a Fast Sliding Mode Based Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 134-140. |
| [18] | Wen Qin, Zhongxin Liu, Zengqiang Chen. Formation Control for Nonlinear Multi-agent Systems with Linear Extended State Observer[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 171-179. |
| [19] | Airong Wei, Xiaoming Hu, Yuzhen Wang. Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 84-91. |
| [20] | Hao Zhang, Gang Feng, Huaicheng Yan, Qijun Chen. Distributed Self-triggered Control for Consensus of Multi-agent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 40-45. |

Figures(6)




Yanxu Su, Qingling Wang and Changyin Sun, "Self-triggered Consensus Control for Linear Multi-agent Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 150-157, Jan. 2020. doi: 10.1109/JAS.2019.1911837
 DownLoad:
DownLoad:













 DownLoad:
DownLoad:




