


Figure
1.
ROBEAR [5]
 Volume 6
Issue 6
Volume 6
Issue 6
IEEE/CAA Journal of Automatica Sinica
| Citation: | Changan Jiang and Satoshi Ueno, "Posture Maintenance Control of 2-Link Object By Nonprehensile Two-Cooperative-Arm Robot Without Compensating Friction," IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1397-1403, Nov. 2019. doi: 10.1109/JAS.2019.1911759

|
IN recent years, shortage of the caregivers is becoming a serious social problem as the result of a falling birth rate and an aging population. At the caregiving workplace, transferring a care-receiver from a bed to a wheelchair frequently is quite heavy burden for caregivers. In order to relieve the burden on them, a lot of nursing care assistant equipment has been developed by different research groups [1]–[3], such as Resyone wheelchair-bed developed by Panasonic AGE-FREE Co., Ltd. and ROBOHELPER SASUKE developed by Muscle, Inc. etc. [4]. RIKEN-SRK Collaboration Center for Human-Interactive Robot Research has developed a high-functionality nursing care assistant robot ROBEAR [5] (see Fig. 1), which can realize soft movement of two 6 DoF arms to assist a care-receiver to stand up or to transfer a care-receiver from a bed.
From the perspective of the actual application at the caregiving workplace, safety is the most important thing. For guaranteeing it, one caregiver must stand beside the caregiving device. Also, auxiliary belt or handrail which is used to avoid the care-receiver falling from the side is usually employed simultaneously. However, auxiliary parts are rarely used for fall protection in vertical direction because of their installation inconvenience in service. In this research, the movement of robot arm in 2-dimensional space is considered to maintain the care-receiver’s posture and avoid his/her falling in vertical direction. So a nonprehensile two-cooperative-arm robot will be applied to manipulate a 2-link object with one passive joint which is regarded as a care-receiver in a 2-dimensional space. Many research works on different types of nonprehensile manipulation can be found in [6]. They have applied nonprehensile manipulation to realize many functions, such as throwing [7], [8], catching [9], batting [10], sliding [11], [12] and so on. An application on holding N-link object by using nonprehensile two-cooperative-arm robot has been considered in [13], [14]. In [13], a dynamic model for manipulating a two-rigid-link object by applying two cooperative arms is built. And holding and lifting-up motion without considering friction is realized. However, in a real-world application, the friction cannot be ignored and it will affect the arms’ performance of holding and lifting-up motion. So the general way to solve this problem is to design a friction compensator to cancel the effect of the friction. Many researchers tried to build a friction model which is near to the real friction and designed a compensator according to the friction model [15], [16]. However, the effect of this method is very dependent on the precision of the friction model. In this research, instead of compensating the friction, static friction is utilized reasonably during holding and lifting up the 2-link object.
On the other hand, considering that fast variance of movement of robot arms may lead care-receivers to feel afraid, uncomfortable, and even pained during holding and lifting up, an optimal regulator which can be modified according to care-receivers’ feeling is designed [17]. In this research, care-receivers’ feeling is also considered. In details, for reducing discomfort and pain caused by relative motion between robot arms and care-receivers, the contact points will be kept constant during holding and lifting up. To realize this purpose, a feedback control system is designed to keep the 2-link object regarded as a care-receiver not dropping down from the arms with static friction. Satisfying the stable condition under the static friction, the region of two orientation angles of the 2-link object can be found. And the most robust pair of the angles (hardest to drop down) among the obtained region can be picked up. Then the relationship between the robust pair of the angles and contact places on the arms can be constructed. According to the relationship, a controller is designed to maintain the posture of the object by moving two robot arms. By changing the target position of the 2-link object, two arms can be controlled to hold or lift up the object to the target position with the proposed method. Finally, in order to verify the effectiveness of the proposed method, experimental results on holding and lifting up the 2-link object with nonprehensile two-cooperative-arm robot are shown.
The rest of this paper is organized as follows. In Section II, model of 2-link object is built. Then, motion controller is designed to maintain the posture of 2-link object during holding and lifting-up motion without compensating friction in Section III. Experimental results are shown and analyzed in Section IV. Section V is conclusion of this paper.
In this research, a 2-link object with one passive joint is regarded as a care-receiver (see Fig. 2). The left link of the 2-link object is called Link1, the right one is called Link2. All the symbols of the system are shown in Fig. 2.
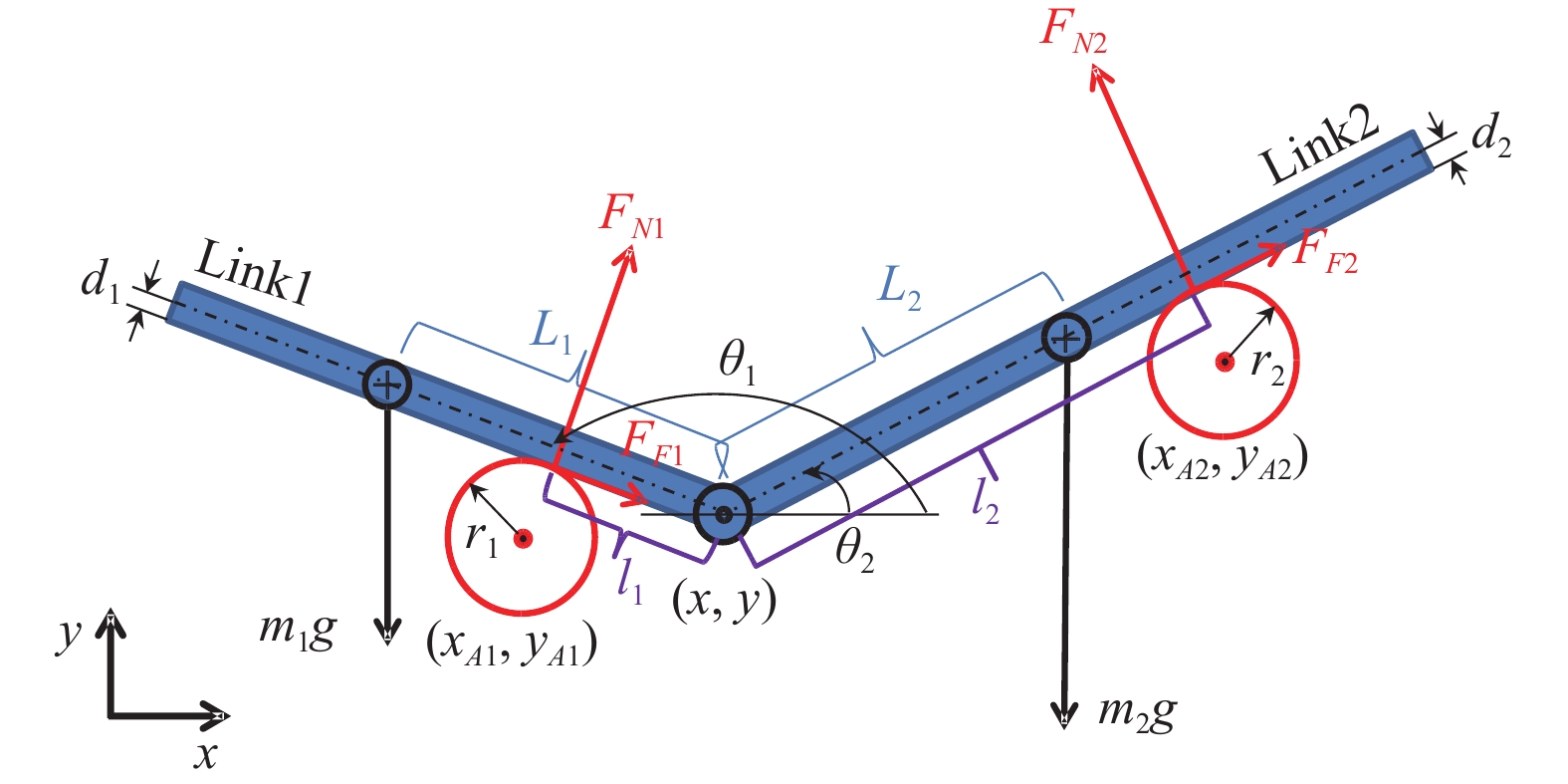
For keeping the 2-link object stable on the nonprehensile arms, the dynamics model of the object can be described by applying Newton-Euler equations of motion [13], [17]. According to the actual application at the caregiving workplace, the arms could not move fast. Otherwise, the care-receiver would feel afraid, uncomfortable even painful. Considering this situation, a static model of the 2-link object is built as follows.
| [0(m1+m2)g]=B1[FN1FN2]+B2[FF1FF2] | (1) |
| [m1gL1c1m2gL2c2]=B3[FN1FN2] | (2) |
where
| B1=[s1−s2−c1c2],B2=[−c1c2−s1s2],B3=[−l100l2] |
and
In order to reduce the discomfort and pain caused by relative motion between nonprehensile arms and the care-receiver, the contact points would be kept constant during holding and lifting up. So the distances
| [xyl1l2]=A4×4[xA1yA1xA2yA2]+B4×1 | (3) |
where
| A4×4=1s21[−s1c2c1c2c1s2−c1c2−s1s2c1s2s1s2−s1c2s2−c2−s2c2s1−c1−s1c1]B4×1=1s21[−(r1+d1)c2−(r2+d2)c1−(r1+d1)s2−(r2+d2)s1(r2+d2)+(r1+d1)c21(r1+d1)+(r2+d2)c21] |
As mentioned above, in order to make the care-receivers comfortable, it is better to fix the contact points during holding and lifting up. That is,
| |FF1|≤μsFN1(90∘<θ1<180∘) | (4) |
| |FF2|≤μsFN2(0∘<θ2<90∘) | (5) |
where
1)
2)
where
| a=m1L1(m1+m2)l1,b=m2L2(m1+m2)l2. |
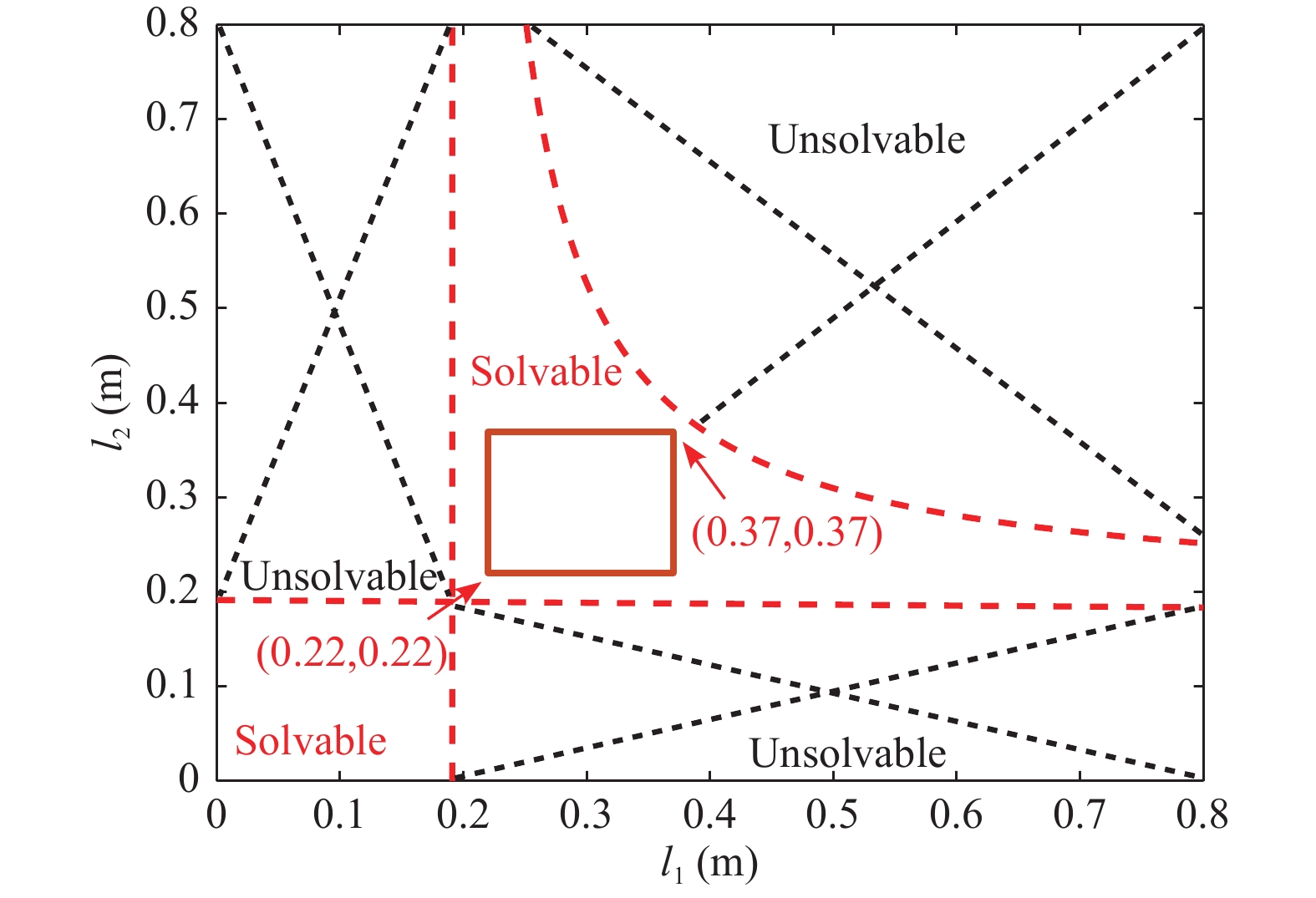
According to the above solvability condition, we can obtain the solvable and unsolvable area for
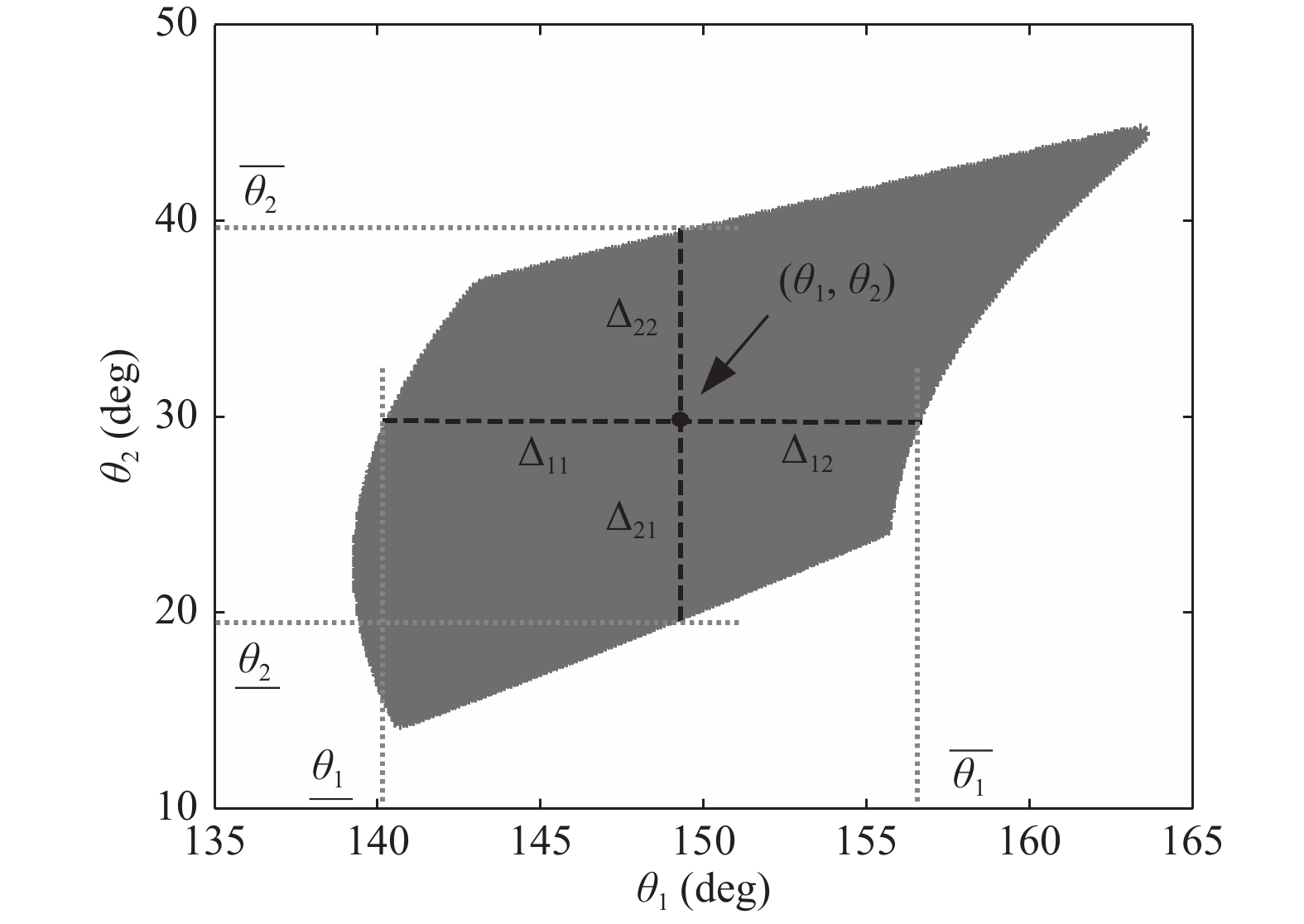
| f(θ1,θ2)=maxθ1,θ2[min{Δ11,Δ12,Δ21,Δ22}] | (6) |
such that
| {|FFi|≤μsFNi,(i=1,2)90∘<θ1<180∘0∘<θ2<90∘ |
where,
As shown in Fig. 4,
In order to achieve optimal results quickly and avoid local minima under different distances, we let the optimal result of previous step be the initial values of current step, and employ MATLAB function
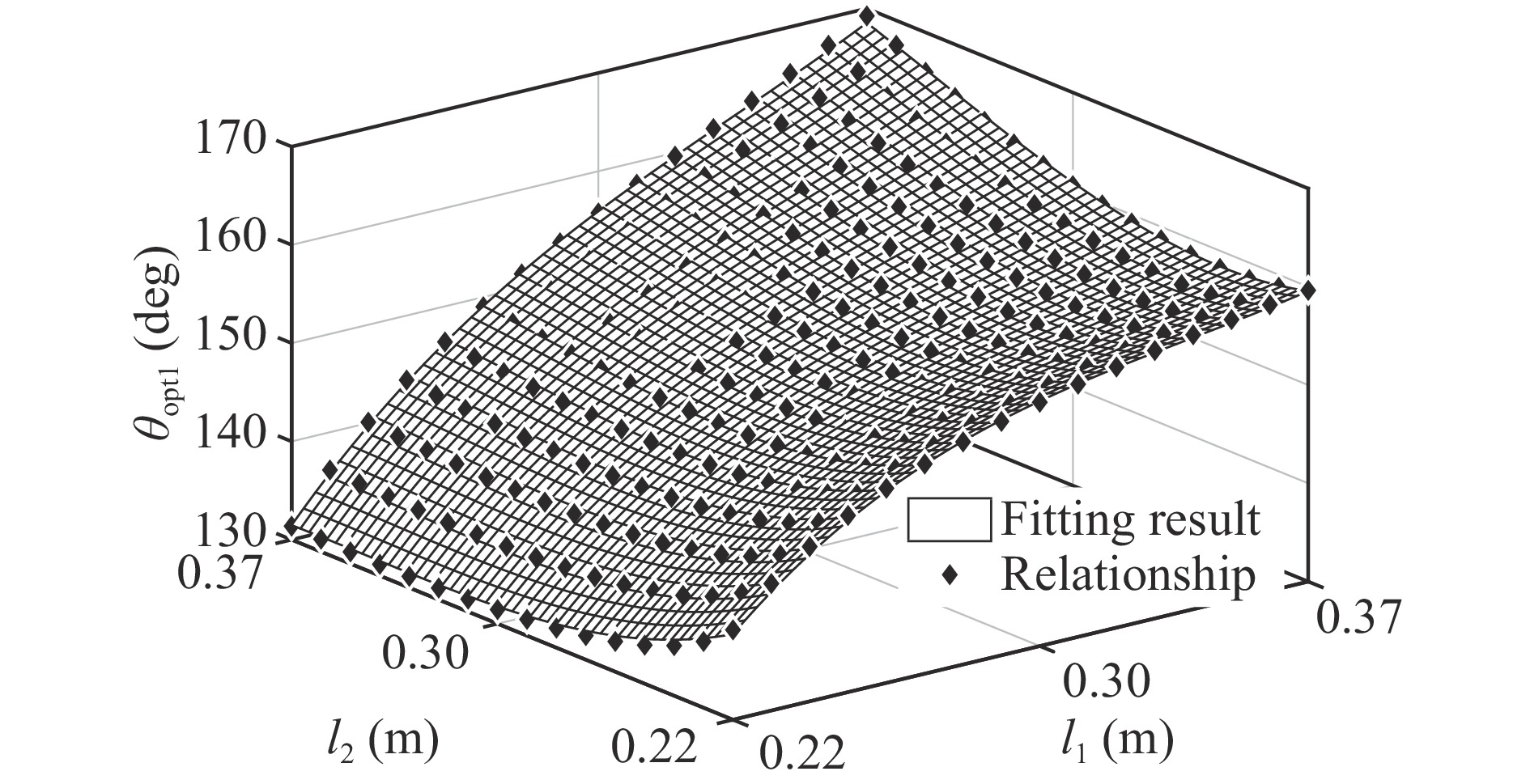
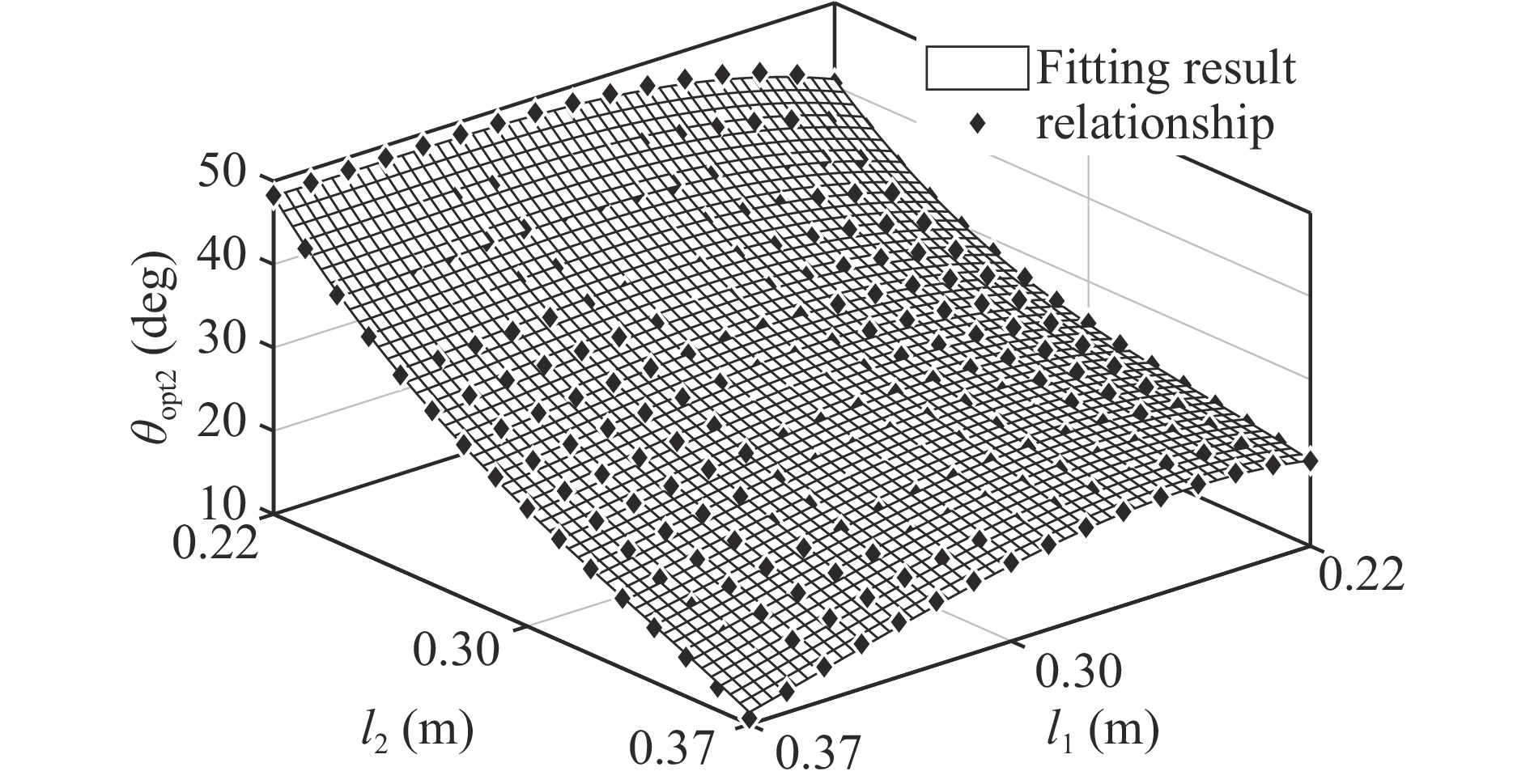
By using least squares method, we fit the relationships (marked by “
| θopt1=29.34+2463l1−1450l2−7370l21+158.2l1l2+3951l22+7141l31+479.8l21l2+472.5l1l22−3934l32 | (7) |
| θopt2=141.2+1482l1−2410l2−4036l21−189.9l1l2+7223l22+4017l31−461l21l2−438l1l22−7004l32. | (8) |
During holding and lifting-up motion control, we set the desired position of the passive joint as
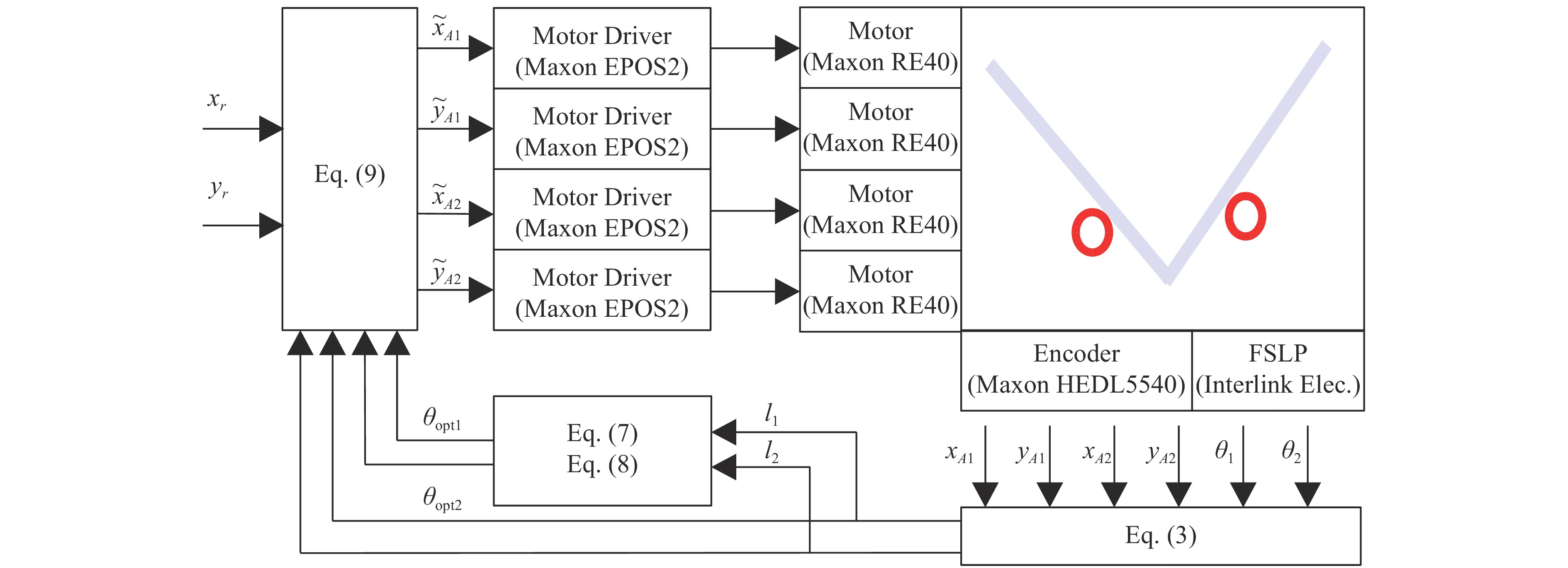
| [˜xA1˜yA1˜xA2˜yA2]=A−14×4{[xryrl1rl2r]−B4×1}. | (9) |
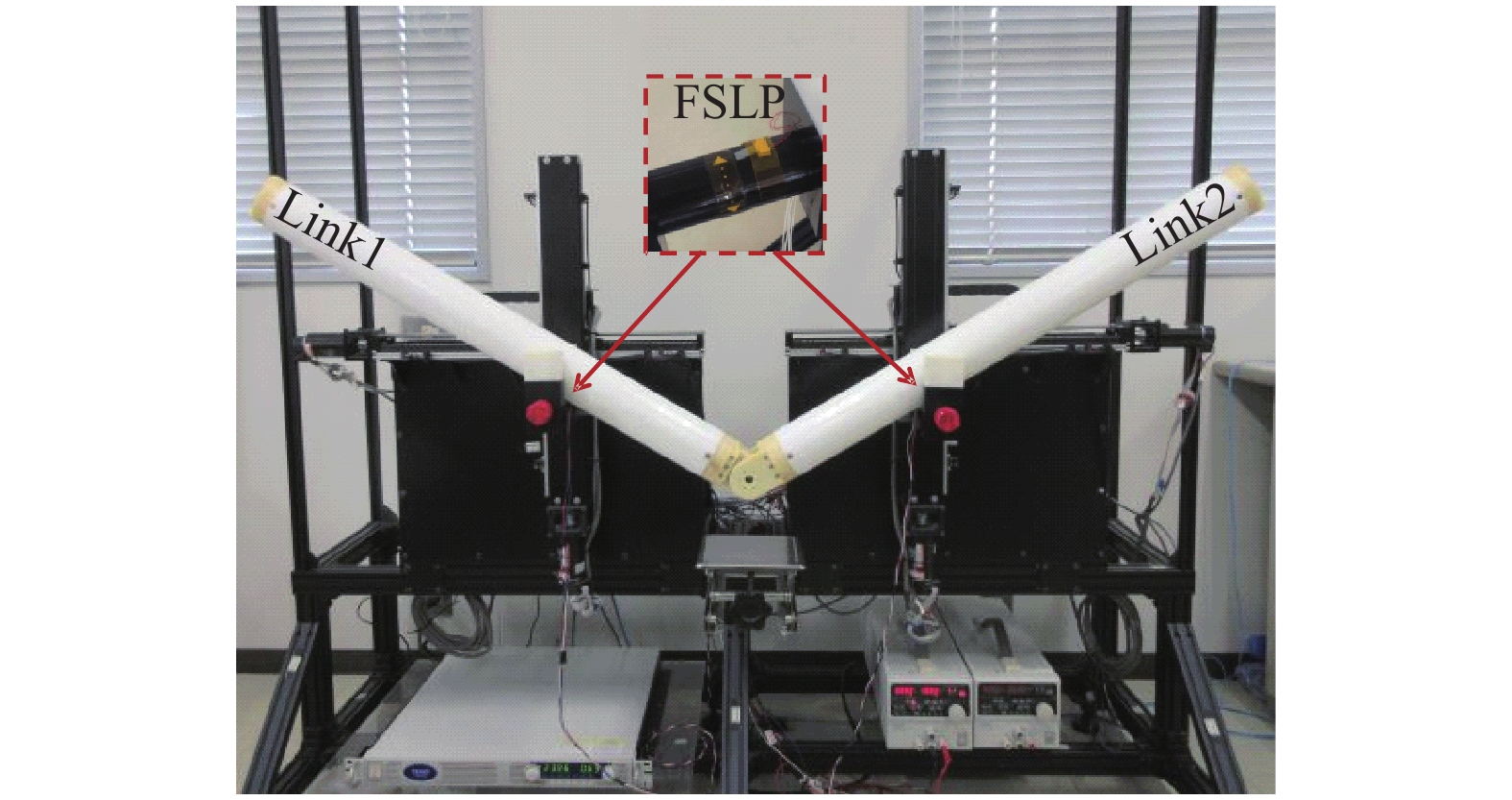
To verify the effectiveness of our proposed posture maintenance control method, we implement it to the nonprehensile two-cooperative-arm robot (see Fig. 8). The robot arms can be driven by 4 DC motors (RE40, Maxon motor) and drivers (EPOS2, Maxon motor) on X-Y axis. The positions of the robot arms can be calculated by using the encoders (HEDL5540, Maxon motor) which are fixed at the end of the DC motors. For measuring the orientation angles of 2-link object, we pasted FSLPs (Force-Sensing Linear Potentiometer, Interlink Electronics) on the surfaces of the robot arms and calibrated the relationship between the measured signal from FSLP and the orientation angles of the 2-link object. The related parameters of 2-link object and robot arms are given in Table I.
| $ i=1 $ | $ i=2 $ | |
| $ m_i $ (Kg) | $ 2.71 $ | $ 2.5 $ |
| $ d_i $ (m) | $ 0.036 $ | $ 0.036 $ |
| $ r_i $ (m) | $ 0.015 $ | $ 0.015 $ |
| $ L_i $ (m) | $ 0.367 $ | $ 0.399 $ |
| $ {\mu_s} $ | $ 0.161 $ | $ 0.161 $ |
 DownLoad:
CSV
DownLoad:
CSV
Based on the proposed posture maintenance control method, the control scheme of the system is structured (see Fig. 9). Since
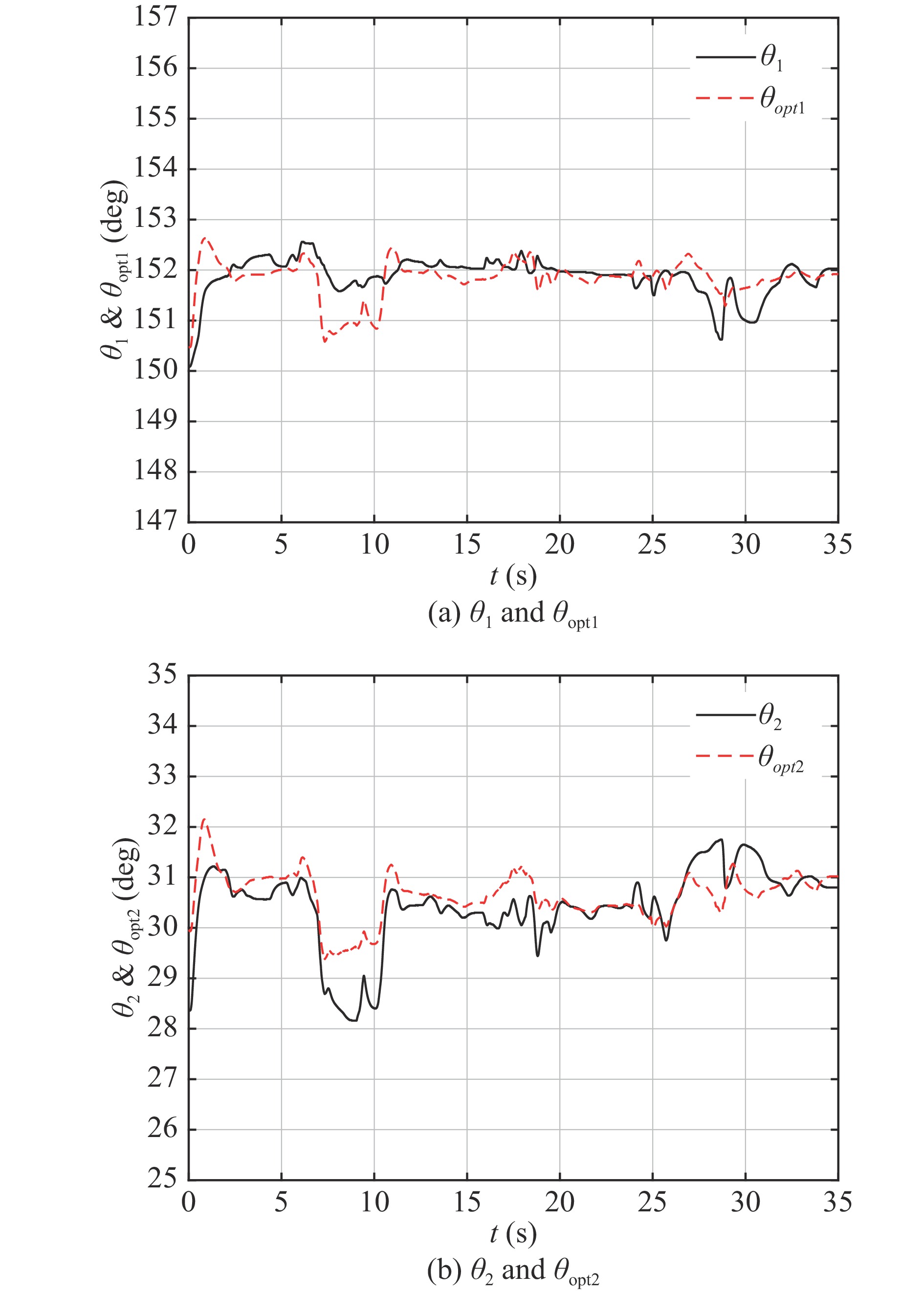
In this experiment, we controlled nonprehensile cooperative arms to hold 2-link object at the constant position (
In Fig. 10, we can see
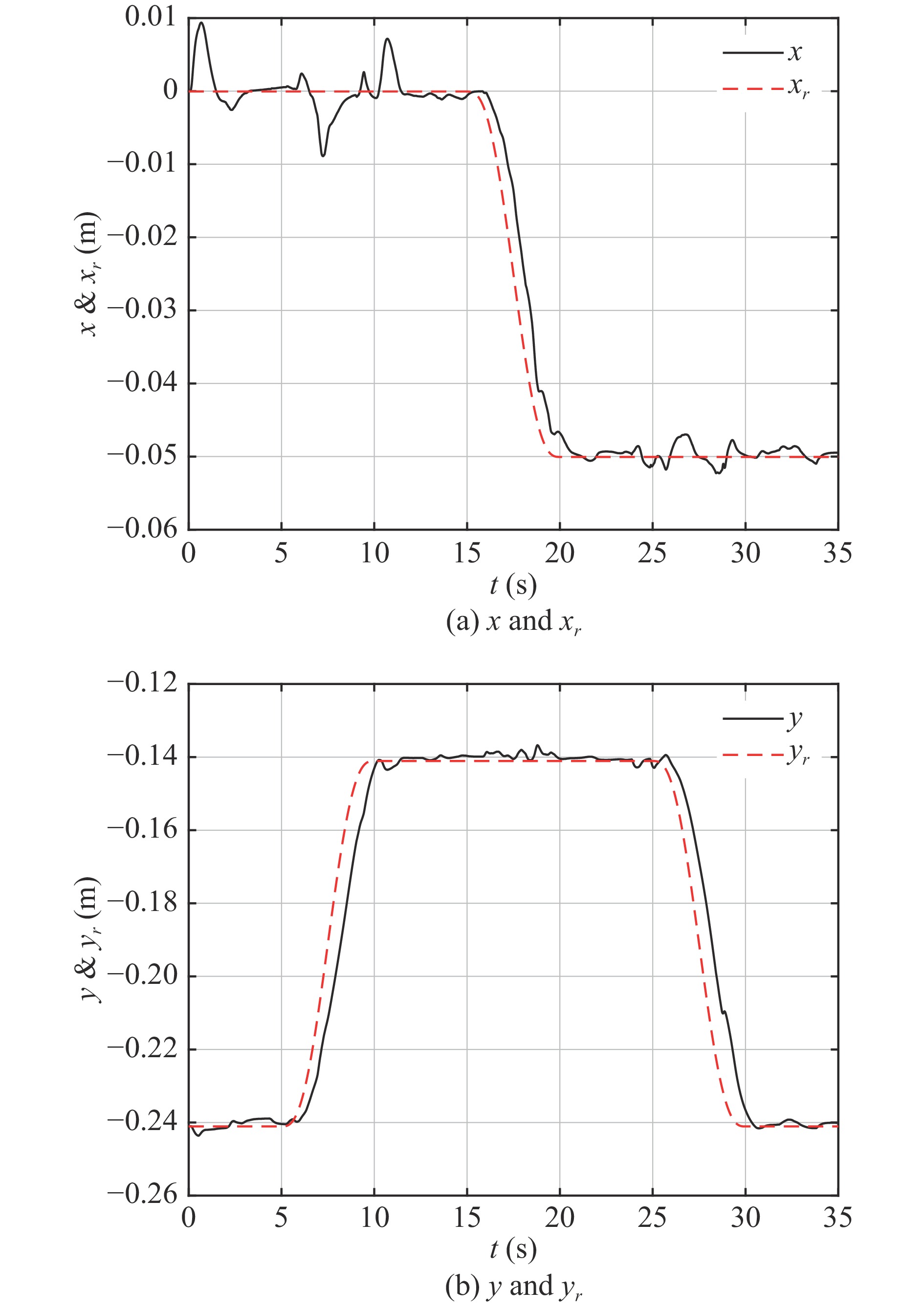
In this experiment, we controlled robot arms to lift up 2-link object along the trajectory
| xr(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5 | (10) |
| yr(t)=b0+b1t+b2t2+b3t3+b4t4+b5t5 | (11) |
with the following boundary conditions.
| xr(0)=xinitxr(tf)=xtargyr(0)=yinityr(tf)=ytarg˙xr(0)=˙yr(0)=0˙xr(tf)=˙yr(tf)=0¨xr(0)=¨yr(0)=0¨xr(tf)=¨yr(tf)=0. |
So we can obtain the coefficients of (10) and (11) as follows.
| a0=xinitb0=yinita1=a2=0b1=b2=0a3=10(xtarg−xinit)t3fb3=10(ytarg−yinit)t3f |
| a4=−15(xtarg−xinit)t4fb4=−15(ytarg−yinit)t4fa5=6(xtarg−xinit)t5fb5=6(ytarg−yinit)t5f |
The steps of this experiment are
1) Hold 2-link object at 0 (m),
2) Lift up 2-link object to (0 (m),
3) Hold 2-link object at (0 (m),
4) Lift up 2-link object to (
5) Hold 2-link object at (
6) Lift up 2-link object to (
7) Hold 2-link object at (
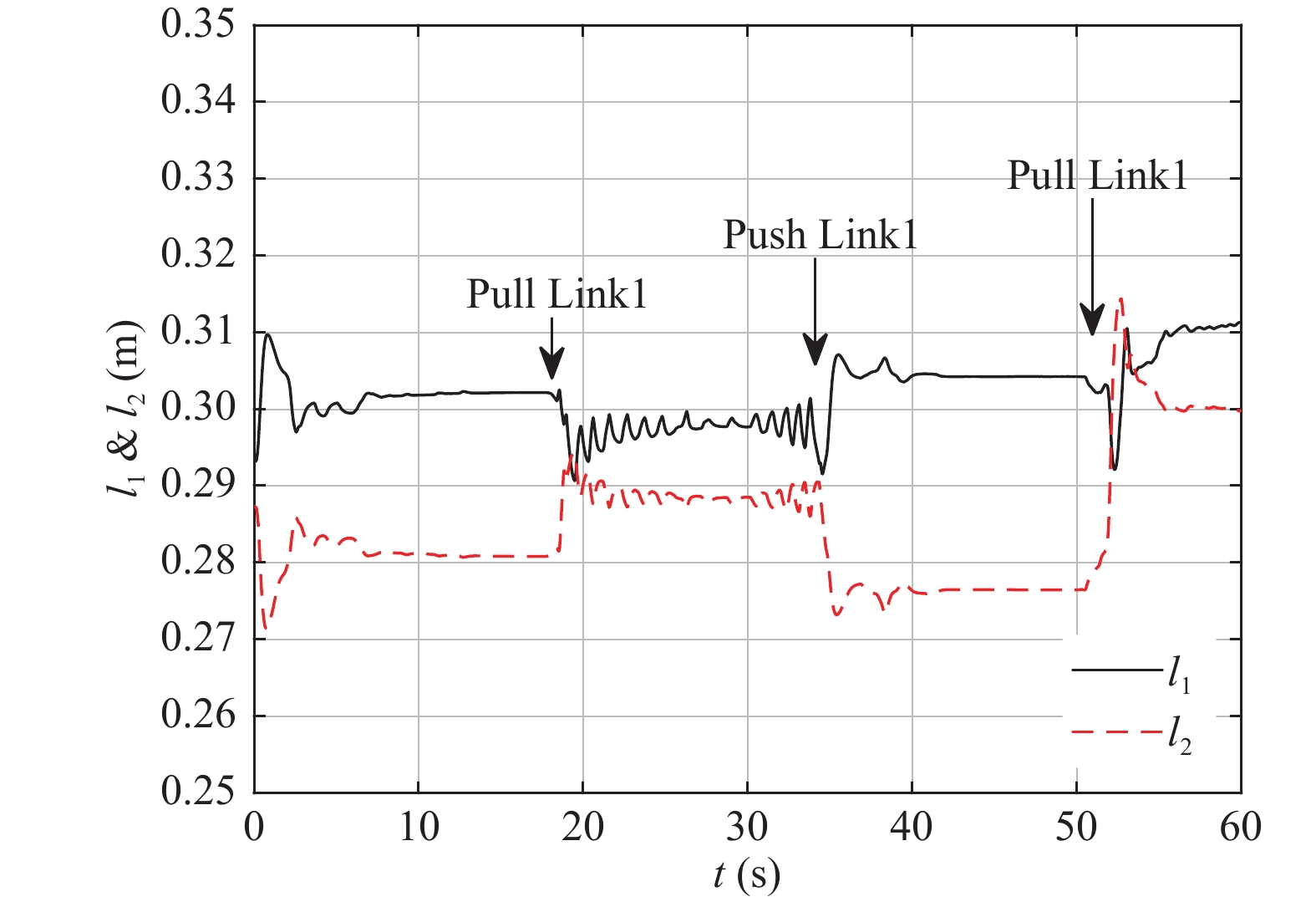
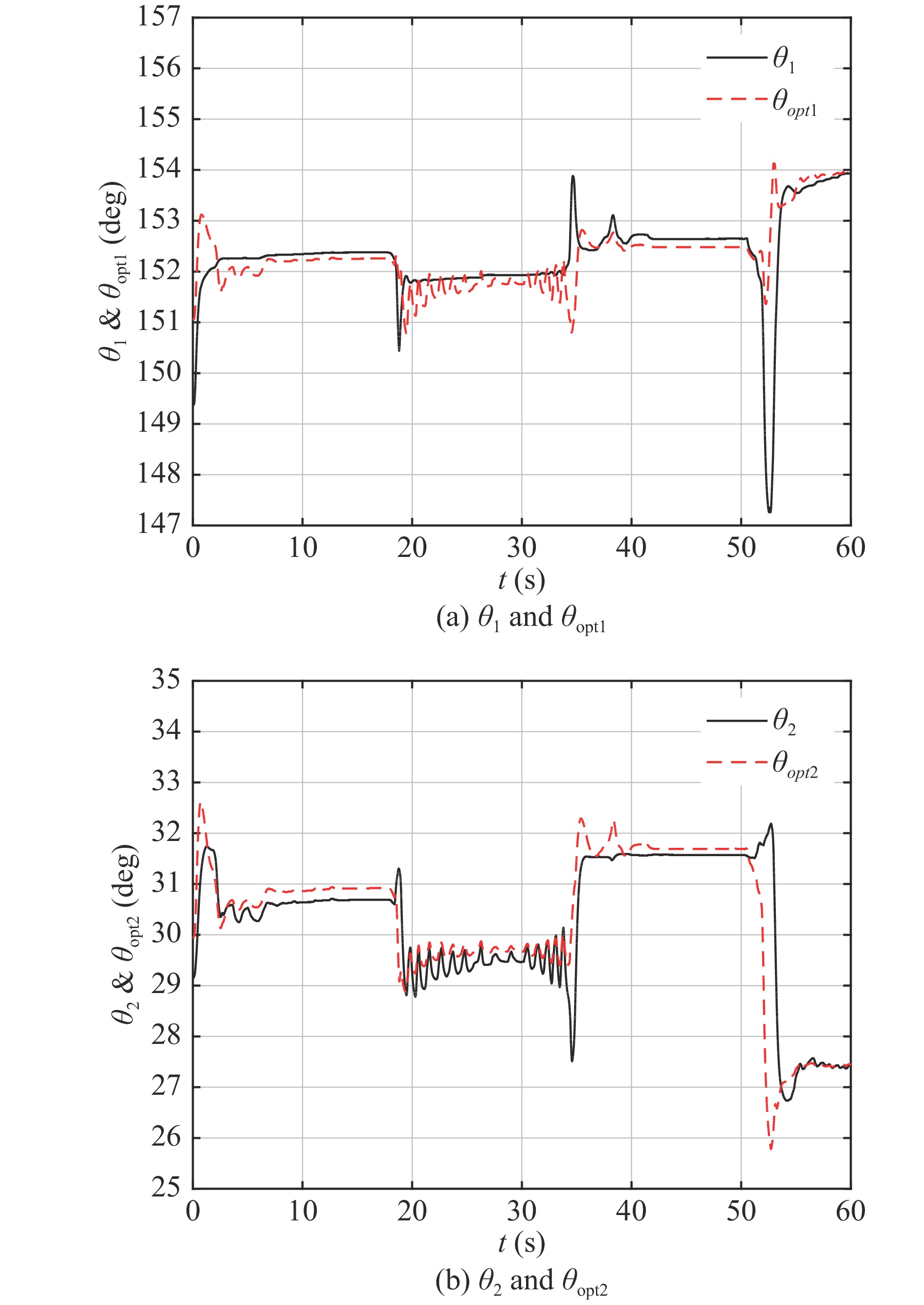
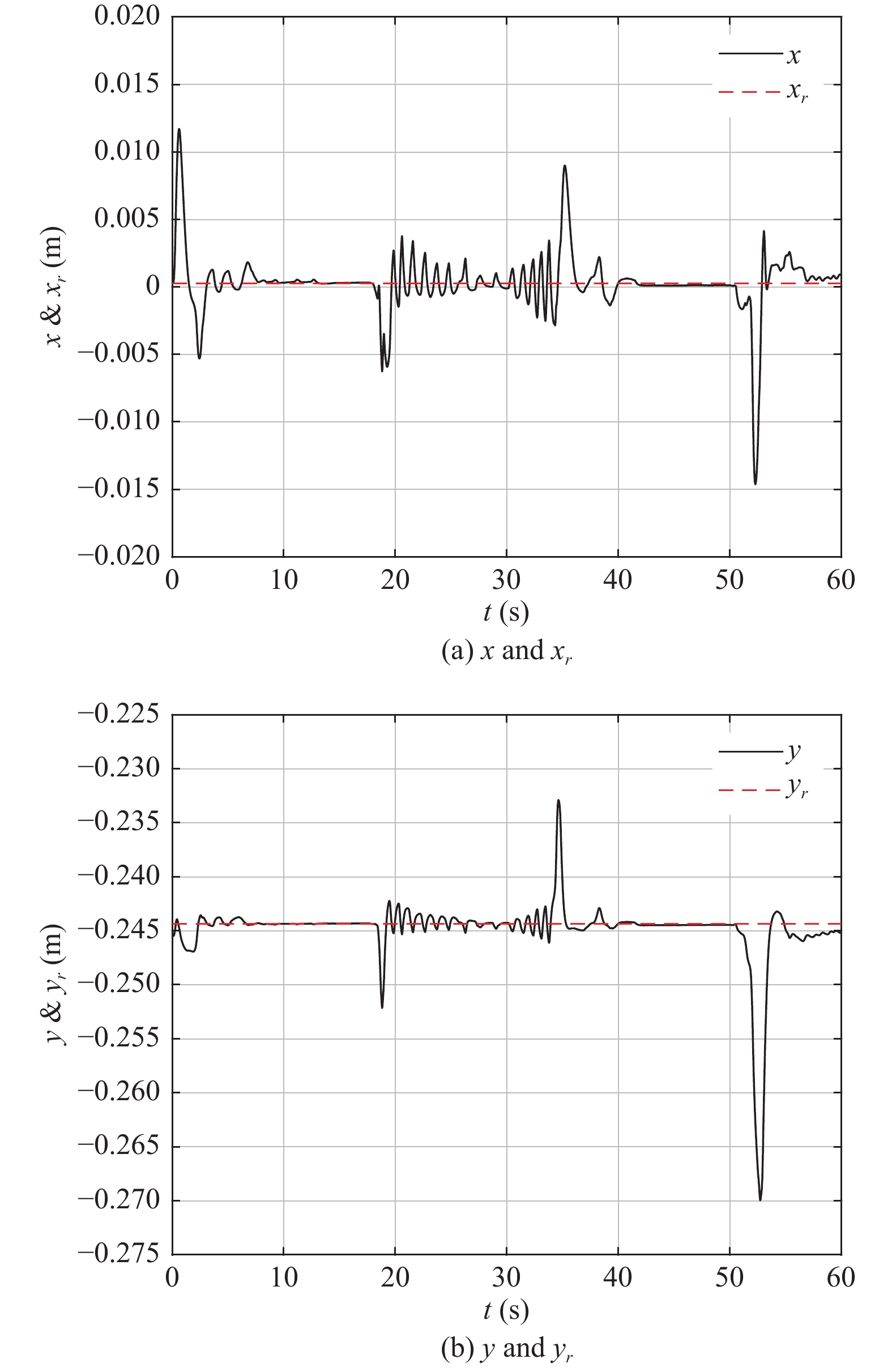
and each step costs 5 s. The trajectories of each lifting-up motion are planned by using (10) and (11). We added disturbance by hand (Pull & Push Link 1), and got the results (see Figs. 13–15).

In Fig. 13, the time of adding disturbance is shown. During holding motion and lifting-up motion,
In this paper, stable regions for posture maintenance control were obtained based on the built static model of 2-link object while it was kept stable on the nonprehensile robot arms within static friction force. Among the obtained regions, the robust pairs of orientation angles corresponding to the distances from the contact points to the passive joint of 2-link object were found. Under the obtained robust orientation angles, a feedback control system scheme was designed to control the robot arms to hold and lift up 2-link object. Experimental results showed the effectiveness of the proposed method. In the future work, another link which is regarded as the care-receiver's shank will be added. The new model of 3-link object will be built and the stable region and robust orientation angles will be recalculated.
| [1] |
J. Jiang, Z. Huang, B. Huo, Y. Zhang, and S. Song, " Research progress and prospect of nursing robot,” Recent Patents on Mechanical Engineering, vol. 11, no. 1, pp. 41–57, 2018. doi: 10.2174/2212797611666180306124236
|
| [2] |
T. Tanioka, Y. Yasuhara, K. Osaka, H. Ito, and R. C. Locsin, Nursing Robots-Robotic Technology and Human Caring for the Elderly, Fukuo Shuppan Publishing, 2017.
|
| [3] |
R. C. Locsin and H. Ito, " Can humanoid nurse robots replace human nurses?” J. Nursing, vol. 5, pp. Article 1, 2018. doi: 10.7243/2056-9157-5-1
|
| [4] |
AMED, Robotic care devices portal, http://robotcare.jp/?lang=en.
|
| [5] |
RIKEN, Introduction of ROBEAR, http://rtc.nagoya.riken.jp/ROBEAR/.
|
| [6] |
F. Ruggiero, V. Lippiello, and B. Siciliano, " Nonprehensile dynamic manipulation: a survey,” IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1711–1718, 2018. doi: 10.1109/LRA.2018.2801939
|
| [7] |
K. M. Lynch and C. K. Black, " Recurrence, controllability and stabilization of juggling,” IEEE Trans. Robotics and Automation, vol. 17, no. 2, pp. 113–124, 2001. doi: 10.1109/70.928557
|
| [8] |
R. Ronsse, P. Lefevre, and R. Sepulchre, " Rhythmic feedback control of a blind planar juggler,” IEEE Trans. Robotics, vol. 23, no. 4, pp. 790–802, 2007. doi: 10.1109/TRO.2007.900602
|
| [9] |
P. Cigliano, V. Lippiello, F. Ruggiero and B. Siciliano, " Robotic ball catching with an eye-in-hand single-camera system,” IEEE Trans. Control Systems Technology, vol. 23, no. 5, pp. 1657–1671, 2015. doi: 10.1109/TCST.2014.2380175
|
| [10] |
L. Acosta, J. Rodrigo, J. Mendez, G. Marichal, and M. Sigut, " Pingpong player prototype,” IEEE Robotics &Automation Magazine, vol. 10, no. 4, pp. 44–52, 2003.
|
| [11] |
M. Higashimori, K. Utsumi, Y. Omoto, and M. Kaneko, " Dynamic manipulation inspiered by the handling of a pizza peel,” IEEE Trans. Robotics, vol. 25, no. 4, pp. 829–838, 2009. doi: 10.1109/TRO.2009.2017085
|
| [12] |
T. Vose, P. Umbanhowar, and K. Lynch, " Friction-induced velocity for point parts on a rigid oscillated plate,” Int. J. Robotics Research, vol. 28, no. 8, pp. 1020–1039, 2009. doi: 10.1177/0278364909340279
|
| [13] |
Z. Zyada, Y. Hayakawa, and S. Hosoe, " Model-based control for nonprehensile manipulation of a two-rigid-link object by two cooperative arms,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 472–477, 2010.
|
| [14] |
O. Mehrez, Z. Zyada, H. S. Abbas, and A. A. Abo-Ismail, " Nonprehensile manipulation planning of a three-rigid-link object using two cooperative robot arms,” Int. J. Modelling,Identification and Control, vol. 26, no. 1, pp. 19–31, 2006.
|
| [15] |
Z. Zyada, Y. Hayakawa, and S. Hosoe, " Fuzzy nonprehensile manipulation control of a two-rigid-link object by two cooperative arms,” in Proc. 18th IFAC World Cong., pp. 14614–14621, 2011.
|
| [16] |
C. Canudas de Wit, H. Olsson, K. J. Astrom, and P. Lischinsky, " A new model for control of systems with friction,” IEEE Trans. Automatic Control, vol. 40, no. 3, pp. 429–425, 1995.
|
| [17] |
C. Jiang, Y. Nakatomi, and S. Ueno, " Optimal control of holding motion by non prehensile two-cooperative-arm robot,” Mathematical Problems in Engineering, vol. 2016, pp. Article ID: 5921871, 2016.
|
| [1] | Pengyu Song, Jie Wang, Chunhui Zhao, Biao Huang. From Static and Dynamic Perspectives: A Survey on Historical Data Benchmarks of Control Performance Monitoring[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 300-316. doi: 10.1109/JAS.2024.124902 |
| [2] | Shiying Zhao, Qingxin Meng, Xuzhi Lai, Jinhua She, Edwardo Fumihiko Fukushima, Min Wu. Length-Variable Bionic Continuum Robot With Millimeter-Scale Diameter and Compliant Driving Force[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(4): 655-667. doi: 10.1109/JAS.2024.125091 |
| [3] | Dongfang Li, Jie Huang, Rob Law, Xin Xu, Limin Zhu, Edmond Q. Wu. Interference Suppression and Jitter Elimination Ability-Based Adaption Tracking Guidance for Robotic Fishes[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 126-137. doi: 10.1109/JAS.2024.124632 |
| [4] | Haotian Liu, Yuchuang Tong, Zhengtao Zhang. Human Observation-Inspired Universal Image Acquisition Paradigm Integrating Multi-Objective Motion Planning and Control for Robotics[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(12): 2463-2475. doi: 10.1109/JAS.2024.124512 |
| [5] | Haijing Wang, Jinzhu Peng, Fangfang Zhang, Yaonan Wang. High-Order Control Barrier Function-Based Safety Control of Constrained Robotic Systems: An Augmented Dynamics Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(12): 2487-2496. doi: 10.1109/JAS.2024.124524 |
| [6] | Dan Zhang, Jiabin Hu, Jun Cheng, Zheng-Guang Wu, Huaicheng Yan. A Novel Disturbance Observer Based Fixed-Time Sliding Mode Control for Robotic Manipulators With Global Fast Convergence[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 661-672. doi: 10.1109/JAS.2023.123948 |
| [7] | Dezhen Xiong, Daohui Zhang, Yaqi Chu, Yiwen Zhao, Xingang Zhao. Intuitive Human-Robot-Environment Interaction With EMG Signals: A Review[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1075-1091. doi: 10.1109/JAS.2024.124329 |
| [8] | Yuchuang Tong, Haotian Liu, Zhengtao Zhang. Advancements in Humanoid Robots: A Comprehensive Review and Future Prospects[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 301-328. doi: 10.1109/JAS.2023.124140 |
| [9] | Qiming Liu, Xinru Cui, Zhe Liu, Hesheng Wang. Cognitive Navigation for Intelligent Mobile Robots: A Learning-Based Approach With Topological Memory Configuration[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(9): 1933-1943. doi: 10.1109/JAS.2024.124332 |
| [10] | Qinchen Yang, Fukai Zhang, Cong Wang. Deterministic Learning-Based Neural PID Control for Nonlinear Robotic Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1227-1238. doi: 10.1109/JAS.2024.124224 |
| [11] | Meng Zhou, Zihao Wang, Jing Wang, Zhengcai Cao. Multi-Robot Collaborative Hunting in Cluttered Environments With Obstacle-Avoiding Voronoi Cells[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1643-1655. doi: 10.1109/JAS.2023.124041 |
| [12] | Yunjun Zheng, Jinchuan Zheng, Ke Shao, Han Zhao, Hao Xie, Hai Wang. Adaptive Trajectory Tracking Control for Nonholonomic Wheeled Mobile Robots: A Barrier Function Sliding Mode Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 1007-1021. doi: 10.1109/JAS.2023.124002 |
| [13] | Shengnan Gao, Zhouhua Peng, Haoliang Wang, Lu Liu, Dan Wang. Long Duration Coverage Control of Multiple Robotic Surface Vehicles Under Battery Energy Constraints[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1695-1698. doi: 10.1109/JAS.2023.123438 |
| [14] | Yinlong Zhang, Wei Liang, Mingze Yuan, Hongsheng He, Jindong Tan, Zhibo Pang. Monocular Visual-Inertial and Robotic-Arm Calibration in a Unifying Framework[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(1): 146-159. doi: 10.1109/JAS.2021.1004290 |
| [15] | Arnab Rakshit, Amit Konar, Atulya K. Nagar. A Hybrid Brain-Computer Interface for Closed-Loop Position Control of a Robot Arm[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1344-1360. doi: 10.1109/JAS.2020.1003336 |
| [16] | Wei He, Zhijun Li, C. L. Philip Chen. A Survey of Human-centered Intelligent Robots: Issues and Challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4): 602-609. doi: 10.1109/JAS.2017.7510604 |
| [17] | Yunfei Cai, Zhenmin Tang, Yuhua Ding, Bin Qian. Theory and Application of Multi-robot Service-oriented Architecture[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 15-25. |
| [18] | Hejin Zhang, Zhiyun Zhao, Ziyang Meng, Zongli Lin. Experimental Verification of a Multi-robot Distributed Control Algorithm with Containment and Group Dispersion Behaviors: the Case of Dynamic Leaders[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 54-60. |
| [19] | Lijiao Wang, Bin Meng. Distributed Force/Position Consensus Tracking of Networked Robotic Manipulators[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 180-186. |
| [20] | Kecai Cao, Bin Jiang, Dong Yue. Distributed Consensus of Multiple Nonholonomic Mobile Robots[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(2): 162-170. |

Figures(15) / Tables(1)




Changan Jiang and Satoshi Ueno, "Posture Maintenance Control of 2-Link Object By Nonprehensile Two-Cooperative-Arm Robot Without Compensating Friction," IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1397-1403, Nov. 2019. doi: 10.1109/JAS.2019.1911759
| $ i=1 $ | $ i=2 $ | |
| $ m_i $ (Kg) | $ 2.71 $ | $ 2.5 $ |
| $ d_i $ (m) | $ 0.036 $ | $ 0.036 $ |
| $ r_i $ (m) | $ 0.015 $ | $ 0.015 $ |
| $ L_i $ (m) | $ 0.367 $ | $ 0.399 $ |
| $ {\mu_s} $ | $ 0.161 $ | $ 0.161 $ |
DownLoad:
CSV
 DownLoad:
DownLoad:









































































































































 DownLoad:
DownLoad:













