









































Figure
1.
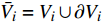
A CVT constructed by 10 random points and trajectories of 4 mobile actuators.
 Volume 7
Issue 2
Volume 7
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | Juan Chen, Baotong Cui, YangQuan Chen and Bo Zhuang, "An Improved Cooperative Team Spraying Control of a Diffusion Process With a Moving or Static Pollution Source," IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 494-504, Mar. 2020. doi: 10.1109/JAS.2019.1911519

|
IN reality, diffusion can be regarded as the net movement of molecules or atoms from a region of high concentration to a region of low concentration. It has lots of applications in chemistry [1], physics [2], biology [3], economics [4] and engineering [5]. Many diffusion processes can be modeled as distributed parameter systems (DPSs), see [6]–[8] for more knowledge.
Earlier works on controlling the diffusion process with a static pollution source were motivated by the applications of centroidal Voronoi tessellations (CVTs) [9]–[11] and mobile actuator-sensor networks (MAS-Net) [12]. Notable pioneering work on CVTs was provided by Du et al. [13]. As we know, the CVT algorithm is a kind of non-model method which can solve the problem of coverage control [14]–[17]. Motivated by the work [11], [18] that the CVT algorithm was used for the sensor placement problem in coverage control and the sensor location problem in feedback control of partial differential equation (PDE) systems, CVTs were extended to the work on diffusion control for the actuator deployment problem with the static sensor networks in [19]. Here the CVT algorithm is also applicable to our work in this paper. Actually, the monitoring and control of a diffusion process can be regarded as the optimal sensor/actuator placement or motion planning problem [20], [21]. More recently, there have been emerged related work on the use of the CVT algorithm for diffusion process control based on MAS-Net [6], [21]–[24]. And other work [25]–[27] on boundary control for PDEs based on the backstepping technique has also arisen.
To the best of our knowledge, the diffusion system in the previous research work is mostly discussed together with proportional (P) controllers and a static pollution source. In fact, a moving pollution source may be more practical than a static one. For instance, smart enemy target sources can be viewed as moving pollution sources in military warfare, which are expected to be eliminated under a group of mobile actuators (robots). Additionally, in some engineering applications, a static or steady state error can be induced by the P control method, which can be taken as a drawback of this method. Owing to this drawback, proportional integral (PI) controllers with the advantage of eliminating steady error and better flexibility (more accurate control) are used in practice instead of P controllers. However, very few results are provided on the control of a diffusion process with a moving or static pollution source based on PI controllers and the CVT algorithm currently.
Motivated by the fact a novel PI method has a better performance than a P control method (i.e., P controller for actuators motion control and spraying control) on controlling a diffusion process [19], [28], we use this PI control method to address the control problem for the diffusion process. Note that, the novelty of the PI method is a PI controller for actuator motion control together with a PI controller with time-delay (for more details, see the last part in Section II) for actuator spraying control. Moreover, a modified simulation platform (diffusion-mobile-actuators-sensors-2-dimension-proportional integral derivative (Diff-MAS2D-PID)) is built for the diffusion system together with PI, PD and PID controllers and moving or static pollution sources. In numerical simulations, we choose the appropriate parameter to minimize the difference of total pollution amount and total spraying amount, which makes the area of interest not overdosed. In addition, this paper addresses a diffusion control problem for an integer-order system by integer-order PI controllers, and the anomalous diffusion control problem in work [29] is realized by fractional-order controllers. From the theoretical point of view, here the convergence analysis of the mobile actuators location by the Lyapunov method in this paper could provide some insights into the control theory of diffusion processes.
The remainder of this paper is organized as follows. The problem statement is introduced in Section II briefly. In Section III, the control problem of a diffusion process is discussed. Section IV gives the convergence analysis of the actuators location. In Section V, a modified simulation platform (Diff-MAS2D-PID) is described. Then, numerical simulations are given to test the effectiveness of our proposed method. Finally, conclusions and some future work are provided in Section VI.
The problem of actuator motion control and spraying control can be framed in a cyber-physical system [21]. In this section, we specifically illustrate the diffusion problem.
A diffusion process could occur in an area
| ∂ϕ∂t=a(∂2ϕ∂x2+∂2ϕ∂y2)+fd(x,y,t)+fc(˜ϕ,x,y,t) | (1) |
where
We suppose that every actuator at its position will receive information from static sensors, move to the high pollution concentration and then release chemical neutralization by the controller. In this paper, our control objectives are introduced as follows:
1) Control the diffusion process rationally and decrease the amount of total pollutants.
2) Minimize the polluted area which is heavily affected.
3) Improve the spraying speed and neutralize the pollution as quickly as possible without making the area of interest overdosed.
| Vi={s∈Ψ∣|s−pi|<|s−pj|,j≠i},∀j∈{1,…,n} | (2) |
where
The set of regions
Fig. 1(a) shows that a CVT can be constructed by 10 random points in the area
Approximately, the variation of actuators space can be neglected in a certain condition and converted into time-delay, which can be expressed as
In this section, we introduce the objective optimization problem of the diffusion process for actuator motion control and spraying control.
As we know, the CVT algorithm is used to solve the time-invariant environment problem whose density function is time-independent. Based on the arguments in [19, Section V], it still can keep the validation of solving our problem in time-varying environment when the evolution of diffusion process is slow, compared with the convergence rate of the Lloyd’s method. This method can be used as a deterministic algorithm to generate a CVT, for which more details can be found in [10], [19], [24]. In order to apply the CVT algorithm for actuator motion control, the time varying could be negligible, and then the pollutant concentration function could be taken as a time-independent function. Due to the absence of specific form of the PDE system (1), we choose the CVT algorithm for the actuator location control since the CVT algorithm is a non-model algorithm, i.e., it does not need to know the exact mathematical form of the model. The proposed control strategy may be uncommon and may have some limitations for the uncertain dynamic system.
Apparently, to control the diffusion process and minimize the heavily affected area, the mobile actuators should get close to the affected area with high pollution concentration and be far from the lightly affected area. However, it seems unreasonable to put all the mobile actuators close to the pollution source since the diffused pollutants far away from the pollution source also need to be eliminated timely. Given above control requirements, the cost function that needs to be minimized is introduced [11], [19]
| J1(P,Θ)=n∑i=1∫Viϕ(s)|s−pi|2ds,s∈Ψ s.t.|˙pi|<kvol,|¨pi|<kacc | (3) |
where
In what follows, we shall write
| J1,P=J1(P,Θ). | (4) |
In addition, some smoothness properties of
Similarly to the arguments in [11], given a region
| MV:=∫Vρ(s)ds,CV:=1MV∫Vsρ(s)ds. | (5) |
Next, let us consider the actuators location optimization problem (3) again. In order to illustrate this specific problem clearly, here, suppose the density function
| MVi:=∫Viϕ(s)dsCVi=ˉpi:=1MVi∫Visϕ(s)ds. | (6) |
Considering the parallel axis theorem, we obtain the partial derivative of the cost function
| ∂J1,P∂pi=2MVi(pi−ˉpi). | (7) |
A necessary condition to minimize the
| ˉpi=argminpiJ1,P. | (8) |
Note that we denote the actuators’ configuration as a centroidal Voronoi configuration, in which each actuator is located at the centroid of its Voronoi cell. The actuator motion control problem is essentially an optimization coverage control problem. Its purpose is to make the actuators reach a centroidal Voronoi configuration, i.e., each actuator’s location can converge to the centroid of its Voronoi cell.
For the purpose of computing the location of mobile actuators by CVTs, the Lloyd’s method is utilized to determine CVTs here. In many practical applications, the robot (actuator or sensor) has only limited communication capabilities. We assume that mobile actuators can communicate with other actuators and sensors in a certain adjustable range. A modified distribution algorithm [19] is introduced, which has the advantage in reducing the computation amount.
Moreover, the pollution should be neutralized as soon as possible without making the area of interest overdosed. However, spraying chemicals amount may not be consistent with the amount of pollutant. In order to reduce the disparities of spraying amount and pollutant amount, we construct a cost function needed to be minimized, which can be described by the following constraint optimization problem
| J2(Us(t),Θ)=(n∑i=1∫Viϕ(s)ds−n∑i=1∫t0usi(τ)dτ)2, s∈Ψ s.t.n∑i=1∫t0usi(τ)dτ≤ks | (9) |
where
In the above constrained optimization problem, it is aimed to find an optimal value
First, we will give more details on Karush-Kuhn-Tucker conditions (KKT conditions) [30], [31] as below, which are crucial to the below main theorem.
Definition 1 [30]: Let
| M(u∗)=0,N(u∗)≤0 | (10) |
and let
Lemma 1 (KKT conditions) [30] : Let
| minimizef(u)s.t.M(u)=0,N(u)≤0 | (11) |
and assume that
| ∇f(u∗)+αT∇M(u∗)+βT∇N(u∗)=0 | (12) |
| βTN(u∗)=0. | (13) |
Now, we are ready to state our main result for the optimal value
Theorem 1: For the above constrained optimization problem, the cost function (9) can approach to optimization, if the
| n∑i=1∫t0u∗si(τ)dτ=ks | (14) |
where
Proof: By Lemma 1 (KKT conditions), we have
| {∂J2(U∗s(t))∂u∗si(t)+λ∂(n∑i=1∫t0u∗si(τ)dτ−ks)∂u∗si(t)=0λ≥0λ(n∑i=1∫t0u∗si(τ)dτ−ks)=0. | (15) |
To find an optimal solution, we can try to set none or one constraint active. Then, we will discuss it in below two cases.
Case 1: In the first case, assume that the constraint is not active (i.e,
| {∂J2(U∗s(t))∂u∗si(t)+λ∂(n∑i=1∫t0u∗si(τ)dτ−ks)∂u∗si(t)=0λ=0n∑i=1∫t0u∗si(τ)dτ<ks. | (16) |
Using (9) for (16), one can readily get that
| n∑i=1∫t0u∗si(τ)dτ=n∑i=1∫Viϕ(s)ds<ks. | (17) |
However, it contradicts the fact
Case 2: In the second case, suppose that the constraint is active (i.e,
| {∂J2(U∗s(t))∂u∗si(t)+λ∂(n∑i=1∫t0u∗si(τ)dτ−ks)∂u∗si(t)=0λ>0n∑i=1∫t0u∗si(τ)dτ−ks=0. | (18) |
Then, substituting (9) into (18), we can obtain
| n∑i=1∫Viϕ(s)ds−n∑i=1∫t0u∗si(τ)dτ−λ2=0 | (19) |
| n∑i=1∫t0u∗si(τ)dτ=ks. | (20) |
This has the solution
| n∑i=1∫t0u∗si(τ)dτ=n∑i=1∫Viϕ(s)ds−λ2=ks | (21) |
where
As illustrated above, if we choose the optimal value
Remark 1: Given the above analysis, total spraying chemical amount is near to the total pollutant amount as the value of
In this section, we will introduce PI controllers for actuator motion planning control and actuator neutralizing control. Meanwhile, we will illustrate the convergence analysis of the actuators location and a new PI-CVT algorithm.
Here, the mobile actuators are treated as virtual particles and their locations meet the following second-order dynamical equation
| ¨pi=upi | (22) |
where
The right hand side of the above equation can be described by
| upi=fi−kv˙pi | (23) |
where
| fi=kp(ˉpi−pi)+ki∫t0(ˉpi−pi)ds | (24) |
where
Substituting (24) into (23), we can get
| upi=kp(ˉpi−pi)+ki∫t0(ˉpi−pi)ds−kv˙pi. | (25) |
The second term of (23) on the right hand side is the viscous friction introduced in [32].
Remark 2: If
Next, we consider the extension of the control design to nonlinear passive-dynamics system [11], [34]. In this paper, the second order system described by a motion equation
| upi=−kproMVi(pi−¯pi)−kintMVi∫t0(pi−ˉpi)ds−kv˙pi | (26) |
where
The convergence analysis on the actuators location (system state) of the closed-loop system (22) induced by (26), can be addressed by the following assumption.
Assumption 1: It is assumed that above positive constants, henceforth called scale positive gains, satisfy
We use the Lyapunov stability theory to analyze the dynamic system (22) of the mobile actuators location. By the control input (26) whose gains satisfy Assumption 1, we can obtain the below main result.
Theorem 2: For the passive-dynamics system (22), asymptotic convergence of the actuators location to the set of centroidal Voronoi configurations (i.e., the set of centroids of Voronoi cells) can be achieved by the proposed control input (26) with the PI controller. If this set is finite, the actuators location will converge to a centroidal Voronoi configuration in which each actuator is located at its Voronoi cell’s centroid.
Proof: Consider the Lyapunov functional
| Ξ(t)=12(kprokv−kintkv)J1,P+12n∑i=1(√kintkvMVi(pi−ˉpi)+√kintkvMVi∫t0(pi−ˉpi)ds)2+12n∑i=1(√kv˙pi+kv√kv(pi−ˉpi))2. | (27) |
Based on the analysis of the CVT algorithm in Section III-A, we have that
| dΞ(t)dt=12n∑i=1(kprokv−kintkv)∂J1,P∂pi˙pi+n∑i=1(√kintkvMVi(pi−ˉpi)+√kintkvMVi∫t0(pi−¯pi)ds)×(√kintkvMVi˙pi+√kintkvMVi(pi−ˉpi))+n∑i=1(√kv˙pi+kv√kv(pi−ˉpi))×(√kv¨pi+kv√kv˙pi). | (28) |
Choosing the formulation
| dΞ(t)dt=n∑i=1(kprokv−kintkv)MVi˙pi(pi−ˉpi) +n∑i=1kintkvMVi˙pi(pi−ˉpi)+n∑i=1kintkvMVi(pi−ˉpi)2 +n∑i=1kintkvMVi˙pi∫t0(pi−ˉpi)ds +n∑i=1kintkvMVi(pi−ˉpi)∫t0(pi−ˉpi)ds −n∑i=1kprokvMVi˙pi(pi−ˉpi) −n∑i=1kintkvMVi˙pi∫t0(pi−ˉpi)ds−n∑i=1k2vkproMVi(pi−ˉpi)2 −n∑i=1kintk2vMVi(pi−ˉpi)∫t0(pi−ˉpi)ds=n∑i=1(kprokv−kintkv+kintkv−kprokv) ×MVi˙pi(pi−ˉpi)+n∑i=1(kintkv−kprok2v) ×MVi(pi−ˉpi)2+n∑i=1(kintkv−kintk2v) ×MVi(pi−ˉpi)∫t0(pi−ˉpi)ds. | (29) |
Using Assumption 1, we have
| kintkv−kprok2v<0,kintkv−kintk2v≤0. | (30) |
Note that here
| dΞ(t)dt=n∑i=1(kintkv−kprok2v)MVi(pi−ˉpi)2 +n∑i=1(kintkv−kintk2v)MVi(pi−ˉpi) ×∫t0(pi−ˉpi)ds≤0. | (31) |
The remainder is similar to the argument in [11, proof of Proposition 3.1 and proof of Proposition 5.1]. Based on the LaSalle’s principle [11], [35], the actuators location can asymptotically converge to the largest invariant set contained in
Remark 3: Above convergence analysis of the mobile actuators location can be viewed as evolution of coverage control of mobile sensors network based on the continuous-time Lloyd descent algorithm. We refer to [11] for more details on coverage control of mobile sensors networks. In addition, if we consider the CVT algorithm in time-varying environment, the convergence problem of the mobile actuators location will be complicated. A deeper analysis on it will be investigated in future work with the help of the corresponding arguments in [36].
Motivated by [21, page 175], in this paper, we design the PI controller like the below mathematical expression for neutralizing pollutants in a diffusion process. The relationship of the chemicals amount of each robot released and the average pollutant concentration in the Voronoi cell belonging to that actuator can be described by
| usi(t)=−kprˉϕi(x,y,t)−kir∫tt−δtˉϕi(x,y,τ)dτ | (32) |
where
| ˉϕi(x,y,t)=∫˜Viϕ(x,y,t)dV∫˜VidV | (33) |
represents the average pollutant concentration,
Let us consider
| ˜Vi=Vi∩Ci | (34) |
where
Remark 4: If
Based on the above analysis, the PI-CVT algorithm is proposed for controlling a diffusion process and will be presented as follows. Algorithm 1 contains two critical parts: actuator motion control and actuator spraying control.
Algorithm 1: PI-CVT algorithm
1. Set initial: actuator location
2. Compute Voronoi cell
3. Gather the data from sensor within Voronoi cell
4. Control actuator motion and spraying: compute motion control input
5. Repeat Steps 2–4 until there exists no pollution, then stop.
The performance of the novel PI control method for the diffusion process can be demonstrated by comparing the performance between novel PI and P control methods in three aspects: 1) the amount of total pollution; 2) the difference between total pollution amount and total spraying amount; 3) the evolution of state
In this section, a simulation platform Diff-MAS2D-PID for motion and spraying control of mobile actuators is introduced later. It is also used as the simulation platform to realize two different cases given below:
1) A diffusion process with a moving pollution source.
2) A diffusion process with a static pollution source.
In addition, this novel PI control strategy is based on the CVT algorithm and different from other PI control strategies used for a diffusion process. Therefore, it may be not available to implement the comparison with other PI control strategies which are not based on the CVT algorithm. However, the comparison of control effect between the novel PI control method and the P control method for a diffusion process with a static pollution source could be realized. Note that these two control strategies are both based on the CVT algorithm. Since the control performance of the novel PI control strategy comparing with the P control strategy for a moving disturbance is similar to the counterparts of a static disturbance case, here we only presented the comparison results of a moving pollution source.
As the technological improvement, a simulation platform called diffusion-mobile-actuators-sensors-2-dimension (Diff-MAS2D) [37], [38] is being used for the control problem of a diffusion process. As the extension of Diff-MAS2D, new simulation platforms called fractional-order-diffusion-mobile-actuators-sensors-2-dimension (FO-Diff-MAS2D) and frac-tional-order-diffusion-mobile-actuator-sensor-2-dimension fr-actional-order-proportional-integral (FO-Diff-MAS2D-FOPI) have been introduced to the fractional order anomalous diffusion problem for optimal spraying control [28], [29], [39]. We refer [40] for more basic knowledge about above two simulation platforms.
Motivated by Diff-MAS2D [37], [38], here we develop a modified simulation platform Diff-MAS2D-PID for two-dimensional diffusion control by introducing PID controllers into it. The area concerned is given in uniformization by
The spatial domain of a diffusion system is discretized by the finite-difference method based on Diff-MAS2D-PID, then the time domain integration is left to MATLAB/Simulink simulation platform. Specifically, Diff-MAS2D-PID can be used to solve the diffusion control problem for actuator location and spraying control via PID controllers. Some main features of Diff-MAS2D-PID are shown below:
1) Sensors and actuators can be collocated or non-collocated.
2) Pollution source can be moving or static.
3) The dynamics equation of actuators location can be modeled as the first order or second order while the diffusion system can be open-loop or closed-loop.
4) The controllers for actuators motion planning and spraying control can be P controllers, PI controllers, PD controllers or PID controllers, which can be applied in
For the case of the moving pollution source, the 4 actuators try to move near the pollution source and release chemistry to neutralize the diffusion process. And the diffusion process is depicted as
| ∂ϕ∂t=0.01(∂ϕ2∂x2+∂ϕ2∂y2)+fmd(x,y,t)+fmc(˜ϕ,x,y,t) | (35) |
with the initial condition
| ϕ(x,y,0)=0 | (36) |
and Neumann boundary conditions
| ∂ϕ∂ˉn=0 | (37) |
where
The moving pollution source is modeled as a point disturbance
| {x=0.5+0.3cos2πt50y=0.5+0.3sin2πt50. | (38) |
And the disturbance equation can be described as follows:
| fmd(t)=20e−t|(x=0.5+0.3cos2πt50,y=0.5+0.3sin2πt50). | (39) |
The moving pollution source begins to diffuse at
For the actuator motion control, the viscous coefficient is given by
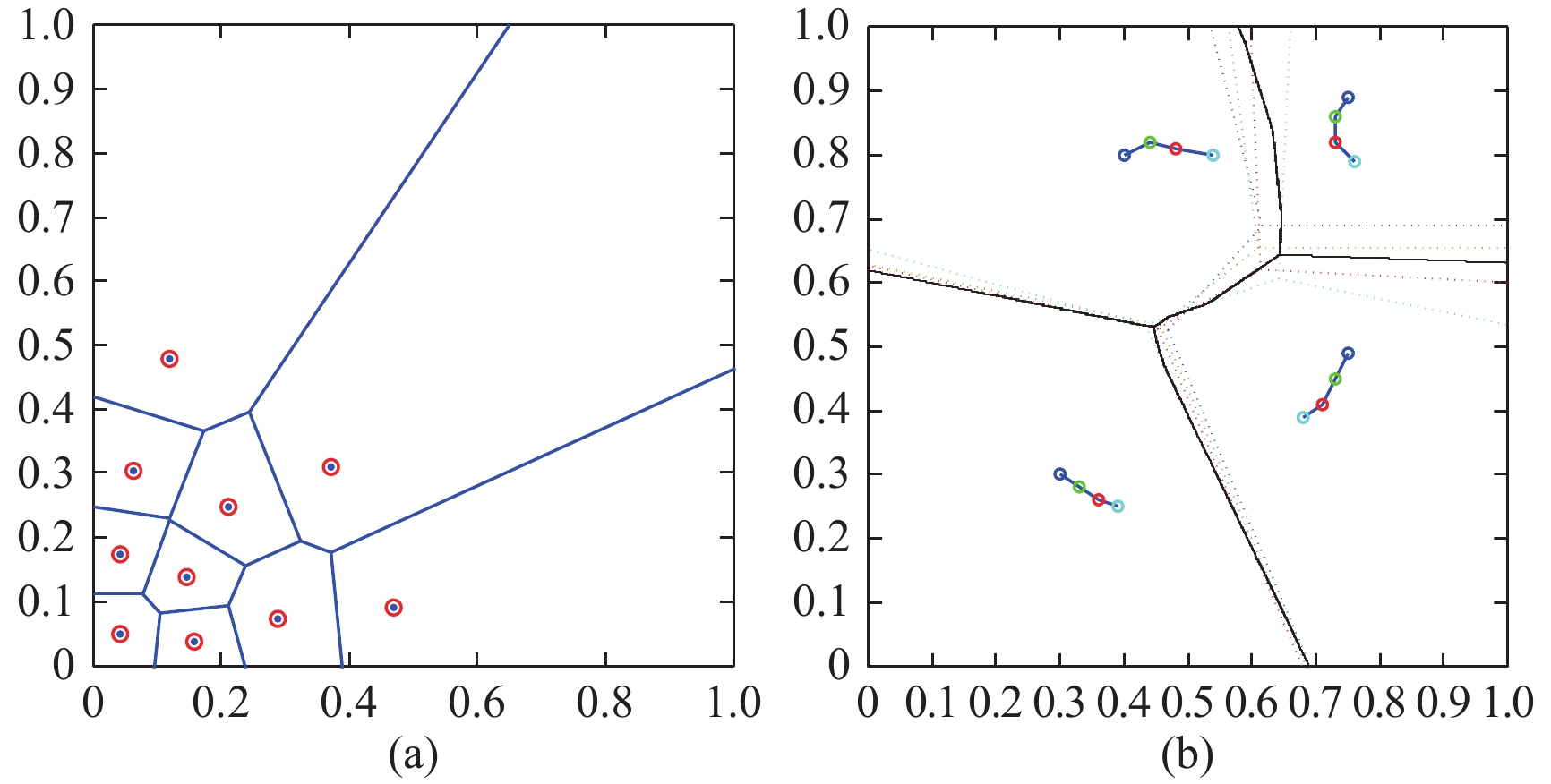
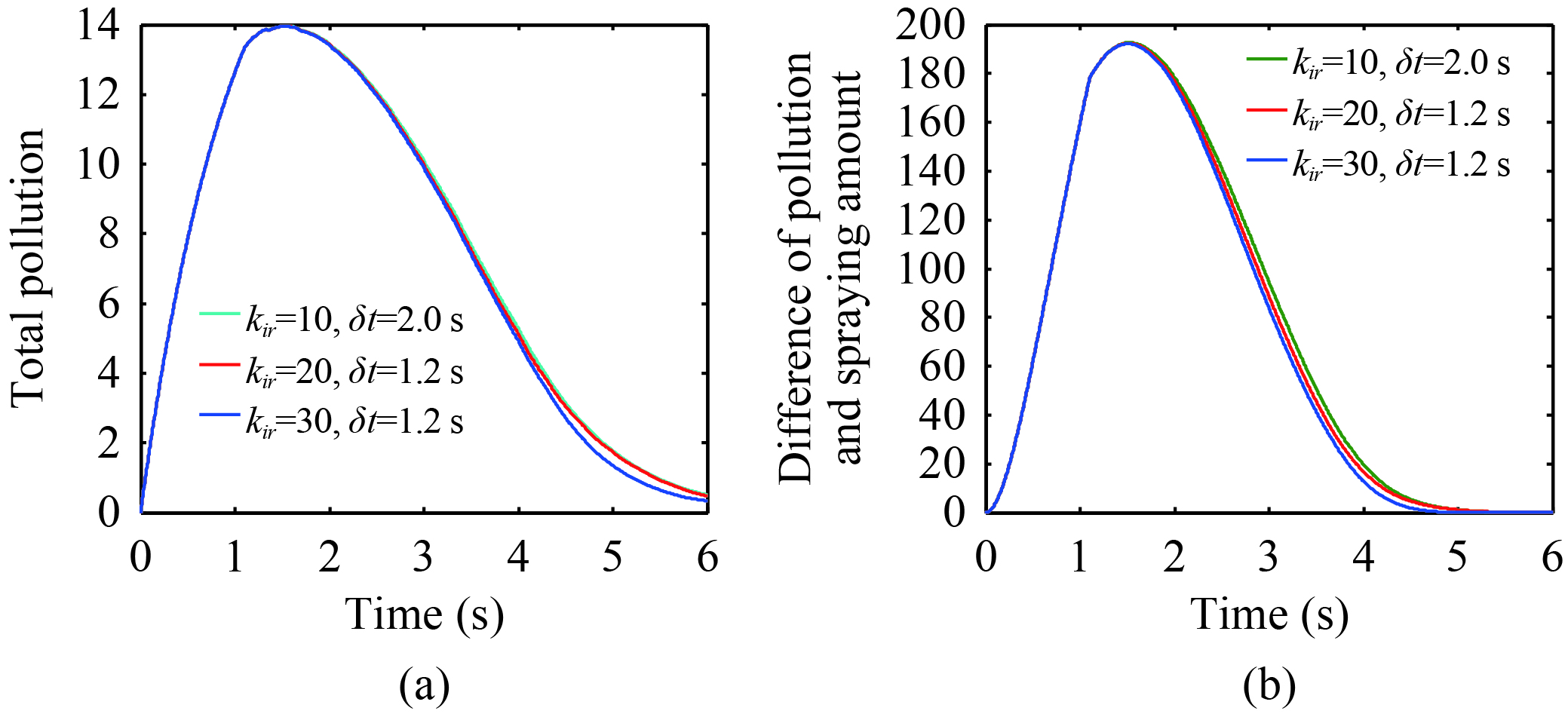
Specifically, Fig. 2(a) shows that the pollution amount gets to the lowest at the end of simulation time when
| upi=9(ˉpi−pi)+1.5∫t0(ˉpi−pi)ds−˙pi. | (40) |
In spraying process, the proportional coefficient is given by
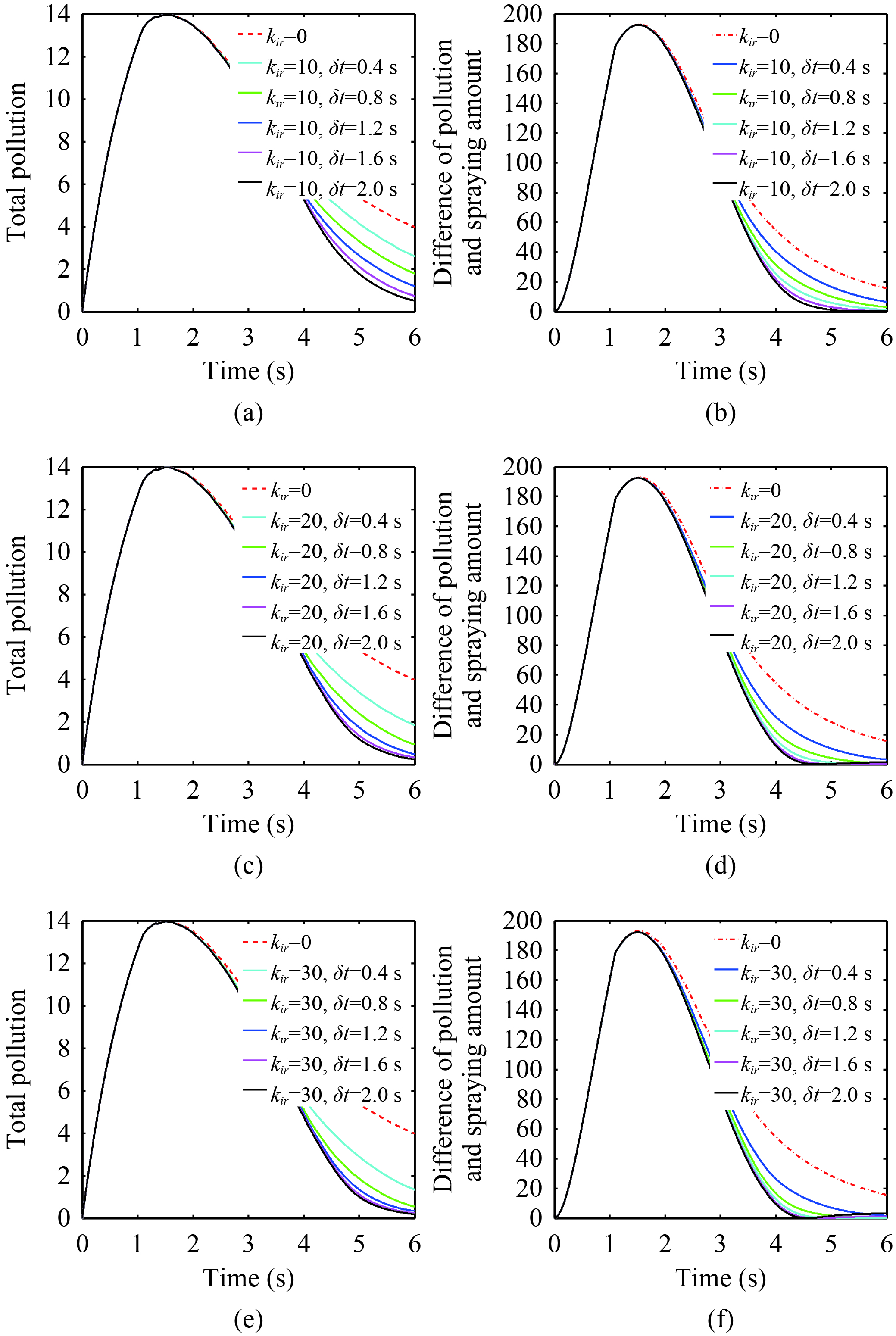
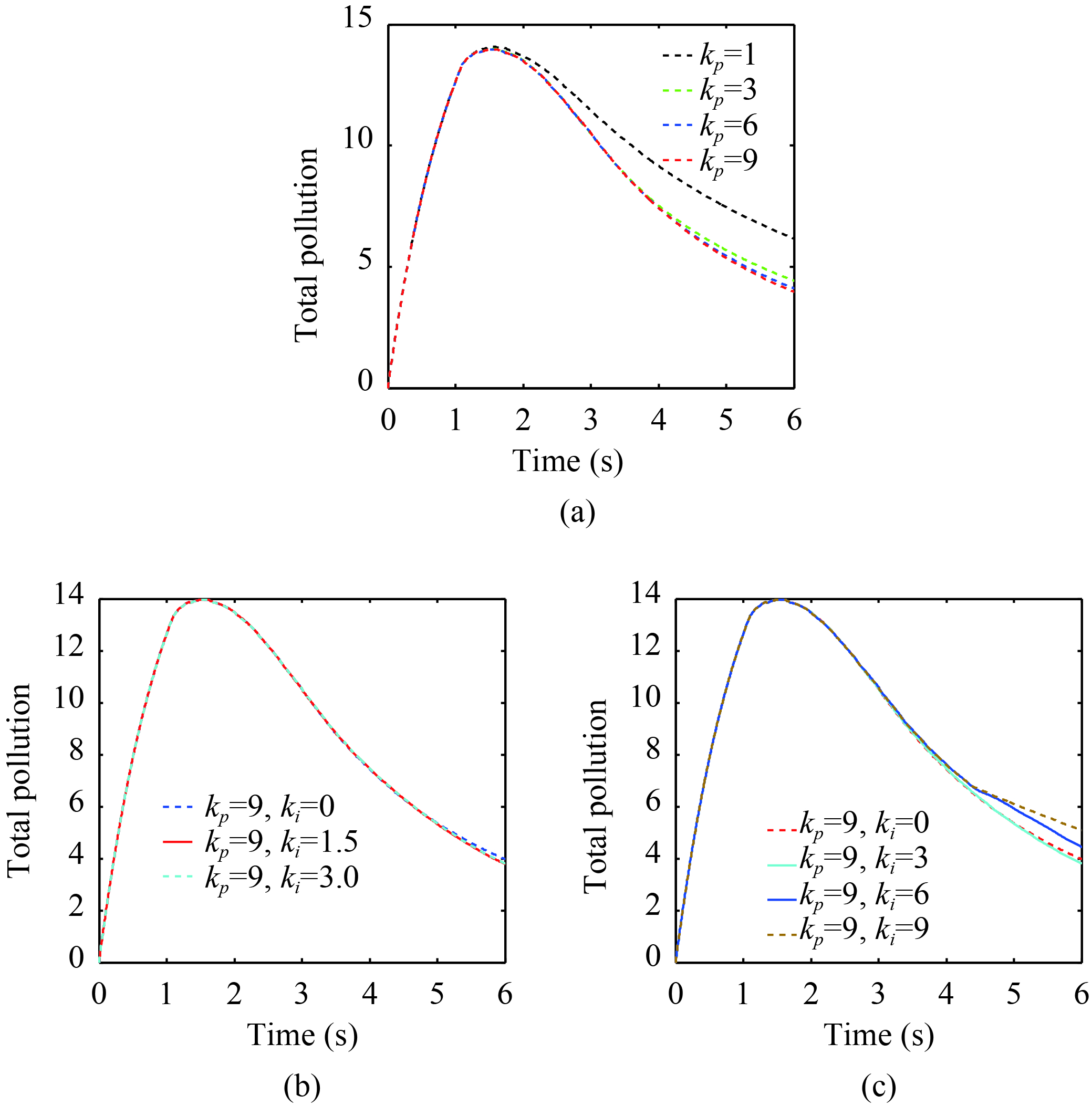
It can be concluded from Fig. 3 that the optimal spraying control can be realized if
Furthermore, the control input could be formulated as
| usi(t)=−10ˉϕi(x,y,t)−30∫tt−1.2ˉϕi(x,y,τ)dτ. | (41) |
For maximizing spraying amount without overdosed, the effectiveness of the PI control method is verified by comparing with the P control method, as shown in Fig. 5. Moreover, from this figure especially Fig. 5 (b), we see the PI control method shows better performance on precision of control.
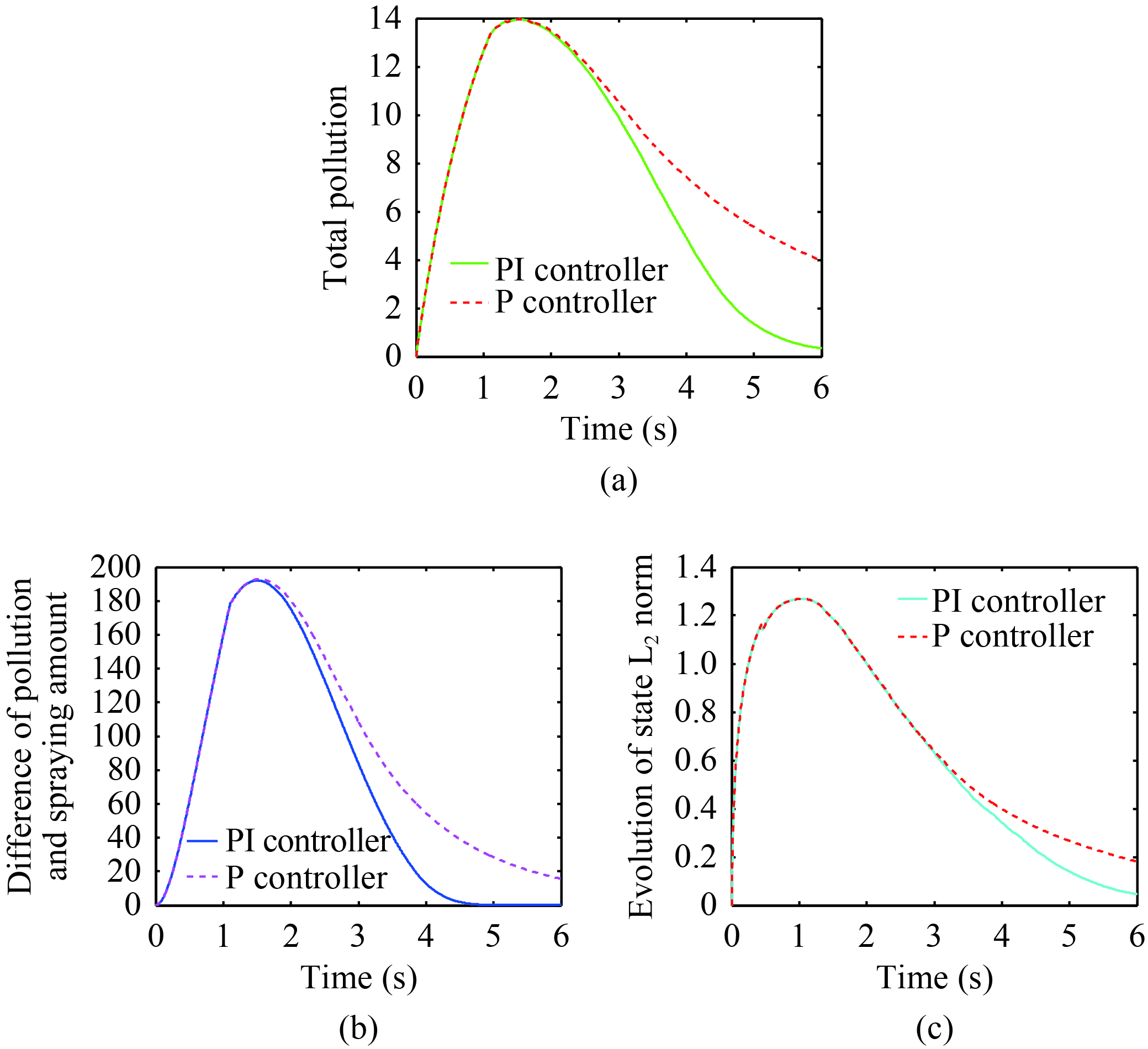
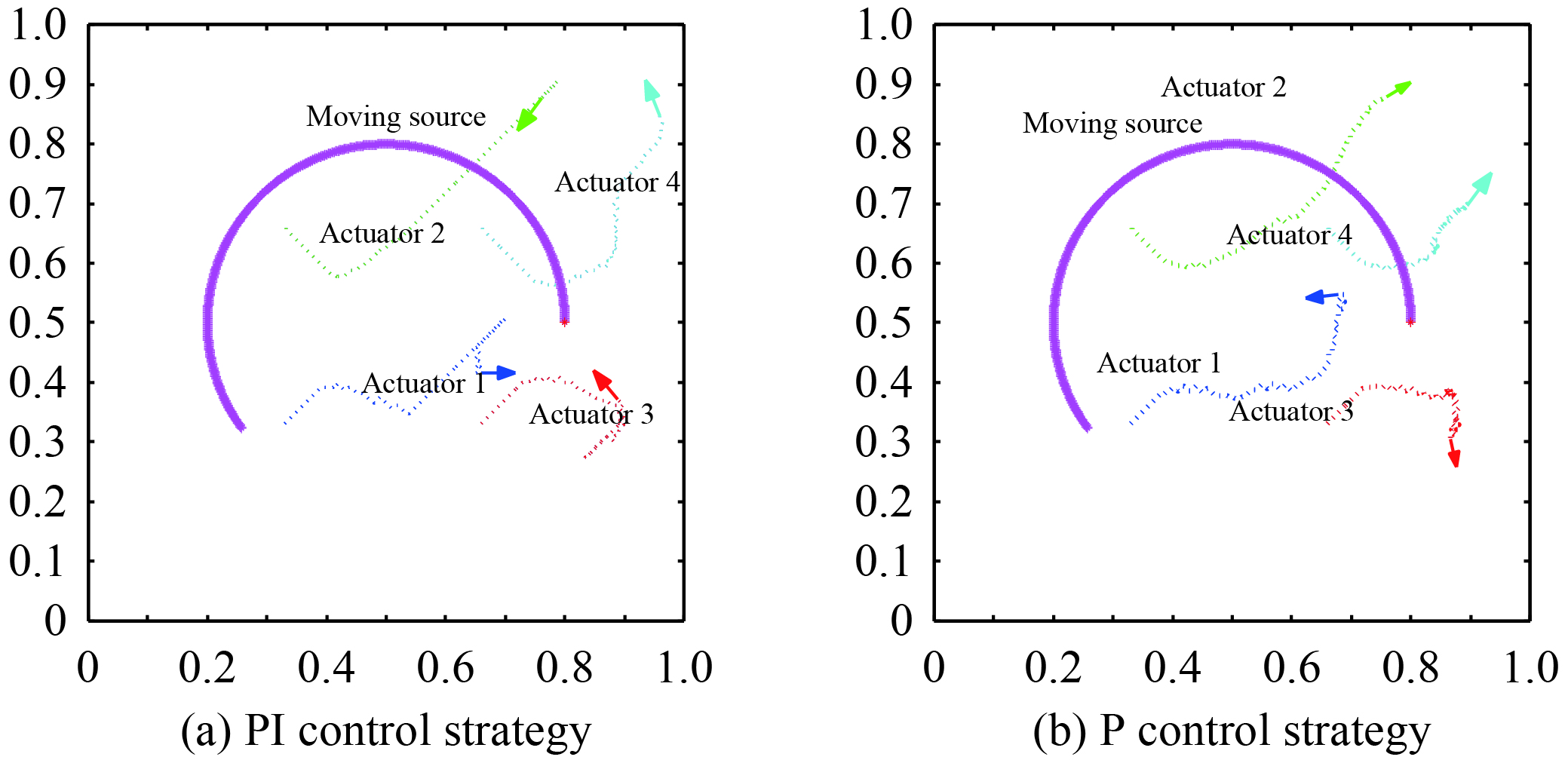
Fig. 6 presents a comparison of mobile actuators trajectories under the PI control method and the P control method, along with the trajectory of a moving pollution source.
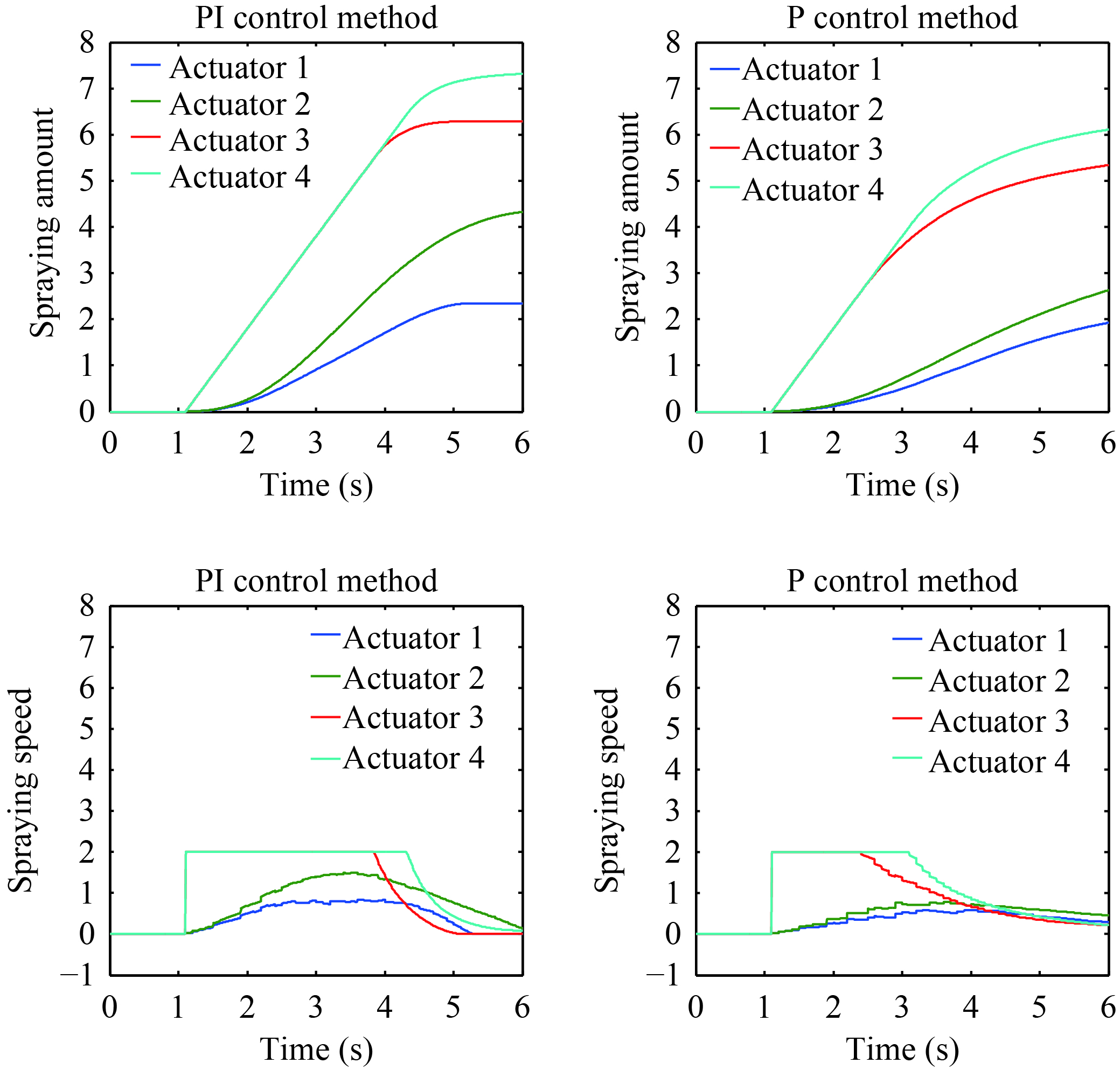
To check the validity of our proposed PI control strategy for neutralizing control, a comparison on spraying amount and spraying speed of each actuator under PI and P control methods has been shown in Fig. 7. It follows that the proposed PI control strategy outperforms the P control strategy in aspects of spraying amount and spraying speed.
Remark 5: If the type of disturbance is different from the exponential decay function in this paper, for example the other type decay function like
In this paper, the control problem of a diffusion process with a moving or static pollution source has been investigated. As the diffusion process evolves slowly enough comparing with the control efforts, CVT applied in time-invariant environment is also available to the time-varying environment. And the convergence problem of the actuators location has been specifically discussed. In addition, with the help of a modified simulation platform (Diff-MAS2D-PID) and the PI-CVT algorithm, we have demonstrated that the novel PI control method is more effective than the P control method for actuator motion and neutralizing control. In the future, the results with the single pollution source can be extended to a diffusion system with multiple pollution sources. Moreover, the proposed method can also be suitable for the diffusion control problem based on the weight cost function of actuator motion control and spraying control.
| [1] |
E. V. Dogadkina, M. G. Dontsov, and V. I. Parfenyuk, “The effect of diffusion processes on surface smoothing upon chemical polishing of titanium,” Protection of Metals and Physical Chemistry of Surfaces, vol. 52, no. 5, pp. 947–953, Sep. 2016.
|
| [2] |
S. O. Akintunde and P. A. Selyshchev, “The influence of radiationinduced vacancy on the formation of thin-film of compound layer during a reactive diffusion process,” J. Physics and Chemistry of Solids, vol. 92, pp. 64–69, May 2016.
|
| [3] |
M. Caputo and C. Cametti, “Fractional derivatives in the diffusion process in heterogeneous systems: the case of transdermal patches,” Mathematical Biosciences, vol. 291, pp. 38–45, Sep. 2017. doi: 10.1016/j.mbs.2017.07.004
|
| [4] |
P. Stoneman, “The diffusion of innovations: some reflections,” Int. J. Economics of Business, vol. 25, no. 1, pp. 85–95, Feb. 2018. doi: 10.1080/13571516.2017.1390834
|
| [5] |
D. Vališ, O. Nováček, K. Hasilováa, and J. Leuchter, “Modelling of degradation and a soft failure moment during the operation of a supercapacitor applying selected diffusion processes,” Engineering Failure Analysis, vol. 82, pp. 566–582, Dec. 2017. doi: 10.1016/j.engfailanal.2017.04.019
|
| [6] |
Y. Q. Chen, Z. M. Wang, and J. S. Liang, “Actuation scheduling in mobile actuator networks for spatial-temporal feedback control of a diffusion process with dynamic obstacle avoidance,” in Proc. IEEE Int. Conf. Mechatronics and Autom., vol. 2, pp. 752–757, Jul. 2005.
|
| [7] |
F. D. Ge, Y. Q. Chen, and C. H. Kou, “Cyber-physical systems as general distributed parameter systems: three types of fractional order models and emerging research opportunities,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 4, pp. 353–357, Oct. 2015. doi: 10.1109/JAS.2015.7296529
|
| [8] |
M. J. Balas and S. A. Frost, “Robust adaptive model tracking for distributed parameter control of linear infinite-dimensional systems in Hilbert space,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 3, pp. 294–301, Jul. 2014. doi: 10.1109/JAS.2014.7004687
|
| [9] |
Q. Du, V. Faber, and M. Gunzburger, “Centroidal voronoi tessellations: applications and algorithms,” SIAM Review, vol. 41, no. 4, pp. 637–676, Dec. 1999. doi: 10.1137/S0036144599352836
|
| [10] |
L. L. Ju, Q. Du, and M. Gunzburger, “Probabilistic methods for centroidal voronoi tessellations and their parallel implementations,” Parallel Computing, vol. 28, no. 10, pp. 1477–1500, Oct. 2002. doi: 10.1016/S0167-8191(02)00151-5
|
| [11] |
J. Cortés, S. Martínez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks,” IEEE Trans. Robotics and Autom., vol. 20, no. 2, pp. 243–255, Apr. 2004. doi: 10.1109/TRA.2004.824698
|
| [12] |
Y. Q. Chen, K. L. Moore, and Z. Song, “Diffusion boundary determination and zone control via mobile actuator-sensor networks (MASnet): challenges and opportunities,” in Proc. SPIE Conf. Intelligent Computing: Theory and Applications II, vol. 5421, pp. 102–113, Apr. 2004.
|
| [13] |
Q. Du, M. Gunzburger, and L. L. Ju, “Advances in studies and applications of centroidal voronoi tessellations,” Numerical Mathematics:Theory,Methods and Applications, vol. 3, no. 2, pp. 119–142, May 2010. doi: 10.4208/nmtma
|
| [14] |
M. Santos, Y. Diaz-Mercado, and M. Egerstedt, “Coverage control for multirobot teams with heterogeneous sensing capabilities,” IEEE Robotics and Autom. Letters, vol. 3, no. 2, pp. 919–925, Apr. 2018.
|
| [15] |
S. Cheng and F. Yuan, “Coverage control for mobile sensor networks with limited communication ranges on a circle,” Automatica, vol. 92, pp. 155–161, Jun. 2018. doi: 10.1016/j.automatica.2018.03.014
|
| [16] |
M. Schwager, M. P. Vitus, S. Powers, D. Rus, and C. J. Tomlin, “Robust adaptive coverage control for robotic sensor networks,” IEEE Trans. Control Network Systems, vol. 4, no. 3, pp. 462–476, Sep. 2017. doi: 10.1109/TCNS.2015.2512326
|
| [17] |
J. Habibi, H. Mahboubi, and A. G. Aghdam, “Distributed coverage control of mobile sensor networks subject to measurement error,” IEEE Trans. Autom. Control, vol. 61, no. 11, pp. 3330–3343, Nov. 2016. doi: 10.1109/TAC.2016.2521370
|
| [18] |
A. L. Faulds and B. B. King, “Sensor location in feedback control of partial differential equation systems,” in Proc. IEEE Int. Conf. on Control Applications, pp. 536–541, Sep. 2000.
|
| [19] |
Y. Q. Chen, Z. M. Wang, and J. S. Liang, “Optimal dynamic actuator location in distributed feedback control of a diffusion process,” in Proc. 44th IEEE Conf. Decision and Control, and the European Control Conf., pp. 5562–5567, Dec. 2005.
|
| [20] |
D. Uciński, Optimal Measurement Methods for Distributed Parameter System Identification. Boca Raton: CRC Press, 2004.
|
| [21] |
H. Y. Chao and Y. Q. Chen, Remote Sensing and Actuation Using Unmanned Vehicles. Hoboken, NJ, USA: John Wiley & Sons, Inc., 2012.
|
| [22] |
Q. Y. Chen, Z. M. Wang, and K. L. Moore, “Optimal spraying control of a diffusion process using mobile actuator networks with fractional potential field based dynamic obstacle avoidance,” in Proc. IEEE Int. Conf. Networking, Sensing and Control (ICNSC), pp. 107–112, Apr. 2006.
|
| [23] |
H. Y. Chao, Y. Q. Chen, and W. Ren, “A study of grouping effect on mobile actuator sensor networks for distributed feedback control of diffusion process using central Voronoi tessellations,” in Proc. IEEE Int. Conf. Mechatronics and Automation, pp. 769–774, Jun. 2006.
|
| [24] |
H. Y. Chao, Y. Q. Chen, and W. Ren, “Consensus of information in distributed control of a diffusion process using centroidal voronoi tessellations,” in Proc. IEEE Conf. Decision and Control, pp. 1441–1446, Dec. 2007.
|
| [25] |
Y. Liu, F. Guo, X. Y. He, and Q. Hui, “Boundary control for an axially moving system with input restriction based on disturbance observers,” IEEE Trans. Systems,Man,and Cybernetics Systems, vol. 49, no. 11, pp. 2242–2253, Nov. 2019.
|
| [26] |
Y. Liu, Z. J. Zhao, and W. He, “Boundary control of an axially moving accelerated/decelerated belt system,” Int. J. Robust and Nonlinear Control, vol. 26, pp. 3849–3866, Mar. 2016.
|
| [27] |
Y. Liu, Z. J. Zhao, and W. He, “Stabilization of an axially moving accelerated/decelerated system via an adaptive boundary control,” ISA Trans., vol. 64, pp. 394–404, Sep. 2016. doi: 10.1016/j.isatra.2016.04.006
|
| [28] |
F. D. Ge, J. Chen, Y. Q. Chen, and C. H. Kou, “Optimal spraying control of a tempered time fractional order anomalous diffusion system,” in Proc. Int. Symposium on Fractional Signals and Systems, pp. 43–48, Oct. 2015.
|
| [29] |
J. Chen, B. Zhuang, Y. Q. Chen, and B. T. Cui, “Diffusion control for a tempered anomalous diffusion system using fractional-order PI controllers,” ISA Trans., vol. 82, pp. 94–106, Nov. 2018.
|
| [30] |
D. G. Luenberger and Y. Y. Ye, Linear and Nonlinear Programming, 3rd ed. Boston: Springer, 2008.
|
| [31] |
D. P. Bertsekas, Constrained Optimization and Lagrange Multiplier Methods. New York: Academic Press, 1982.
|
| [32] |
A. Howard, M. J. Matarić, and G. S. Sukhatme, “Mobile sensor network deployment using potential fields: a distributed, scalable solution to the area coverage problem,” in Proc. 6th Int. Symposium on Distributed Autonomous Robotic Systems (DARS02), vol. 5, pp. 299–308, Jun. 2002.
|
| [33] |
N. Heo and P. K. Varshney, “Energy-efficient deployment of intelligent mobile sensor networks,” IEEE Trans. Systems,Man,and Cybernetics–Part A:Systems and Humans, vol. 35, no. 1, pp. 78–92, Jan. 2005. doi: 10.1109/TSMCA.2004.838486
|
| [34] |
A. van der Schaft. L2-gain and Passivity Techniques in Nonlinear Control, 2nd ed. New York: Springer-Verlag, 1999.
|
| [35] |
J. P. Lasalle, “Complete stability of a nonlinear control system,” in Proc. National Academy of Sciences of the United States of America, vol. 48, no. 4, pp. 600–603, Apr. 1962.
|
| [36] |
J. Cortés, S. Martínez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks: variations on a theme,” in Proc. 10th Mediterranean Conf. Control and Automation-MED, Jul. 2002.
|
| [37] |
J. S. Liang and Y. Q. Chen, “Diff-MAS2D (version 0.9) user’s manual: a simulation platform for controlling distributed parameter systems (diffusion) with networked movable actuators and sensors (MAS) in 2D domain,” Techical Report, Center for Self-Organizing and Intelligent Systems (CSOIS), Department of Electrical and Computer Engineering, College of Engineering, Utah State University, USA, 2004.
|
| [38] |
J. S. Liang and Y. Q. Chen, “Diff/Wave-MAS2D: a simulation platform for measurement and actuation scheduling in distributed parameter systems with mobile actuators and sensors,” in Proc. IEEE Int. Conf. Mechatronics and Autom., pp. 2228–2233, Jul. 2005.
|
| [39] |
J. X. Cao, Y. Q. Chen, and C. P. Li, “Multi-UAV-based optimal cropdusting of anomalously diffusing infestation of crops,” in Proc. American Control Conf., pp. 1278–1283, Jul. 2015.
|
| [40] |
D. Y. Xue and Y. Q. Chen, System Simulation Techniques with MATLAB and Simulink. New Jersey, USA: Wiley & Sons, 2013.
|
| [1] | Shouyan Chen, Weitian He, Zhijia Zhao, Yun Feng, Zhijie Liu, Keum-Shik Hong. Adaptive Control of a Flexible Manipulator With Unknown Hysteresis and Intermittent Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 148-158. doi: 10.1109/JAS.2024.124653 |
| [2] | Yifan Yuan, Guanqun Yang, James Z. Wang, Hui Zhang, Hongming Shan, Fei-Yue Wang, Junping Zhang. Dissecting and Mitigating Semantic Discrepancy in Stable Diffusion for Image-to-Image Translation[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(4): 705-718. doi: 10.1109/JAS.2024.124800 |
| [3] | Yuanhong Xu, Mingcong Deng. Nonlinear Control for Unstable Networked Plants in the Presence of Actuator and Sensor Limitations Using Robust Right Coprime Factorization[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(3): 516-527. doi: 10.1109/JAS.2024.124854 |
| [4] | Bo Lu, Qinghai Miao, Yahui Liu, Tariku Sinshaw Tamir, Hongxia Zhao, Xiqiao Zhang, Yisheng Lv, Fei-Yue Wang. A Diffusion Model for Traffic Data Imputation[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(3): 606-617. doi: 10.1109/JAS.2024.124611 |
| [5] | Xiangqian Yao, Hao Sun, Zhijia Zhao, Yu Liu. Event-Triggered Bipartite Consensus Tracking and Vibration Control of Flexible Timoshenko Manipulators Under Time-Varying Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1190-1201. doi: 10.1109/JAS.2024.124266 |
| [6] | Meng Zhou, Zihao Wang, Jing Wang, Zhengcai Cao. Multi-Robot Collaborative Hunting in Cluttered Environments With Obstacle-Avoiding Voronoi Cells[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1643-1655. doi: 10.1109/JAS.2023.124041 |
| [7] | Yufeng Lian, Xingtian Xiao, Jiliang Zhang, Long Jin, Junzhi Yu, Zhongbo Sun. Neural Dynamics for Cooperative Motion Control of Omnidirectional Mobile Manipulators in the Presence of Noises: A Distributed Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(7): 1605-1620. doi: 10.1109/JAS.2024.124425 |
| [8] | Xuerao Wang, Qingling Wang, Yanxu Su, Yuncheng Ouyang, Changyin Sun. Adaptive Sensor-Fault Tolerant Control of Unmanned Underwater Vehicles With Input Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 907-918. doi: 10.1109/JAS.2023.123837 |
| [9] | Li-Ying Hao, Gege Dong, Tieshan Li, Zhouhua Peng. Path-Following Control With Obstacle Avoidance of Autonomous Surface Vehicles Subject to Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 956-964. doi: 10.1109/JAS.2023.123675 |
| [10] | Yunjun Zheng, Jinchuan Zheng, Ke Shao, Han Zhao, Hao Xie, Hai Wang. Adaptive Trajectory Tracking Control for Nonholonomic Wheeled Mobile Robots: A Barrier Function Sliding Mode Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 1007-1021. doi: 10.1109/JAS.2023.124002 |
| [11] | Yalin Zhang, Zhongxin Liu, Zengqiang Chen. A PI+R Control Scheme Based on Multi-Agent Systems for Economic Dispatch in Isolated BESSs[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(10): 2154-2165. doi: 10.1109/JAS.2024.124236 |
| [12] | Hongru Ren, Hui Ma, Hongyi Li, Zhenyou Wang. Adaptive Fixed-Time Control of Nonlinear MASs With Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252-1262. doi: 10.1109/JAS.2023.123558 |
| [13] | Lifu Wang, Zhaofei Li, Guotao Zhao, Ge Guo, Zhi Kong. Input Structure Design for Structural Controllability of Complex Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(7): 1571-1581. doi: 10.1109/JAS.2023.123504 |
| [14] | Ci Chen, Zhi Liu, Yun Zhang, C. L. Philip Chen, Shengli Xie. Adaptive Control of MIMO Mechanical Systems with Unknown Actuator Nonlinearities Based on the Nussbaum Gain Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 26-34. |
| [15] | Zhongwen Li, Chuanzhi Zang, Peng Zeng, Haibin Yu, Hepeng Li. MAS Based Distributed Automatic Generation Control for Cyber-Physical Microgrid System[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 78-89. |
| [16] | Zhen Hong, Rui Wang, Xile Li. A Clustering-tree Topology Control Based on the Energy Forecast for Heterogeneous Wireless Sensor Networks[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 68-77. |
| [17] | Naizhou Wang, Hailong Pei, Yong Tang. Anti-windup-based Dynamic Controller Synthesis for Lipschitz Systems under Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(4): 358-365. |
| [18] | Yan Song, Haifeng Lou, Shuai Liu. Distributed Model Predictive Control with Actuator Saturation for Markovian Jump Linear System[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(4): 374-381. |
| [19] | Airong Wei, Xiaoming Hu, Yuzhen Wang. Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 84-91. |
| [20] | Girish Chowdhary, Miao Liu, Robert Grande, Thomas Walsh, Jonathan How, Lawrence Carin. Off-Policy Reinforcement Learning with Gaussian Processes[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 227-238. |

Figures(7)




Juan Chen, Baotong Cui, YangQuan Chen and Bo Zhuang, "An Improved Cooperative Team Spraying Control of a Diffusion Process With a Moving or Static Pollution Source," IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 494-504, Mar. 2020. doi: 10.1109/JAS.2019.1911519
 DownLoad:
DownLoad:



























































































































































































































 DownLoad:
DownLoad:





