A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330
Citation:
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330
Citation:
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330
Song Ling graduated from North University of China, China, in 2016.He is currently pursuing the Ph.D.degree with the School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, China.His research interests include neural networks, fuzzy systems, backstepping control, nonlinear system control, and robot control. (e-mail: songling@bjtu.edu.cn)
Huanqing Wang received the B.Sc.degree in mathematics from Bohai University, Jinzhou, China, in 2003, the M.Sc.degree in mathematics from Inner Mongolia University, Huhhot, China, in 2006, and the Ph.D.degree from the Institute of Complexity Science, Qingdao University, Qingdao, China, in 2013. He was a Post-Doctoral Fellow with the Department of Electrical Engineering, Lakehead University, Canada, in 2014, and was a Post-Doctoral Fellow with the Department of Systems and Computer Engineering, Carleton University, Canada.He has authored or co-authored over 40 papers in top international journals.His current research interests include adaptive backstepping control, fuzzy control, neural networks control, stochastic nonlinear systems. Dr.Wang serves as an Associate Editor for several journals, including Neural Computing and Applications, International Journal of Control, Automation, and Systems, and IEEE Access. (e-mail: ndwhq@163.com)
Peter X. Liu (SM'07-F'19) received the B.Sc.and M.Sc.degrees from Northern Jiaotong University, China in 1992 and 1995, respectively, and Ph.D.degree from the University of Alberta, Canada in 2002. He has been with the Department of Systems and Computer Engineering, Carleton University, Canada since July 2002 and he is currently a Professor.He is also with the school of Mechanical, Electronic andControt Engineering, Beijing Jiaotong University as an Adjunct Professor.Dr.Liu has published more than 300 research articles.His research interest includes interactive networked systems and teleoperation, haptics, surgical simulation, robotics, intelligent systems, and context-aware systems. Dr.Liu serves as an Associate Editor for several journals including IEEE/ASME Transactions on Mechatronics, IEEE Transactions on Cybernetics, IEEE Transactions on Automation Science and Engineering, and IEEE Access.He is a licensed member of the Professional Engineers of Ontario (P.Eng), a Fellow of IEEE and a Fellow of Engineering Institute of Canada (FEIC). (e-mail: xpliu@sce.carleton.ca)
In this paper, we propose an adaptive fuzzy dynamic surface control (DSC) scheme for single-link flexible-joint robotic systems with input saturation. A smooth function is utilized with the mean-value theorem to deal with the difficulties associated with input saturation. An adaptive DSC design with an auxiliary first-order filter is used to solve the "explosion of complexity" problem. It is proved that all the signals in the closed-loop system are semi-globally uniformly ultimately bounded, and the tracking error eventually converges to a small neighborhood around zero. The main advantage of the proposed method is that only one adaptation parameter needs to be updated, which reduces the computational burden significantly. Simulation results demonstrate the feasibility of the proposed scheme and the comparison results show that the improved DSC method can reduce the computational burden by almost two thirds in comparison with the standard DSC method.
In recent years, considerable attention has been paid in tracking control of flexible-joint (FJ) robot systems with robot dynamics and actuator dynamics. A number of different control strategies have been reported for FJ robot tracking control; Chang et al. [1] provided an excellent review of these methods including feedback linearisation control [2], passivity control [3], singular perturbation control [4], adaptive sliding mode control [5], proportional-derivative control [6], observer-based control [2] and adaptive backstepping control [7]-[9]. The backstepping technique is one of the popular techniques to control nonlinear systems with parameter uncertainty during the past two decades. However, the backstepping technique has a drawback called "explosion of complexity". To solve the problem, Swaroop et al. [10] proposed an adaptive dynamic surface control (DSC) technique to first solve the problem by introducing a first-order filter at each step of the traditional backstepping design. Many other important research results combined with DSC have also been presented. For example, the authors in [11] considered the problem of a class of strict-feedback nonlinear systems with input saturation using adaptive neural dynamic surface control. Su [12] proposed an output-feedback tracking controller for a class of nonlinear non-minimum phase systems.
Neural networks or fuzzy logic systems (FLSs) have been often used to approximate unknown continuous functions because of their universal approximation properties [13]. Since Polycarpou [14] first developed a neural-based adaptive controller for a class of nonlinear systems and Wang et al. [15] first presented a class of fuzzy systems to approximate a controller for a nonlinear ball and beam system, adaptive neural control and fuzzy control of nonlinear systems have received extensive attention in theoretical and practical applications [16]-[28]. It is worth mentioning that some of these articles have improved the structure of neural networks or fuzzy systems by combining network techniques. The successful application of these technologies will greatly enhance the control of nonlinear systems in the future. On the other hand, many researchers have used fuzzy systems to address control design of nonlinear systems in recent years. For instance, an adaptive fuzzy output feedback control method for single-input-single-output (SISO) nonlinear systems are presented to solve the problems associated with unmodeled dynamics and dynamic disturbances [18]. The FLSs are extended to control FJ robots [19], and an adaptive type-2 fuzzy logic controller (FLC) is proposed for FJ robotic manipulators with dynamical uncertainties [20].
As it is well known, input saturation may lead to control failure due to limited input amplitude of the actuator. Significant research efforts have been made to solve input saturation in the past few years [29]-[35]. The authors ([30] and [31]) solved the problem of uncertain systems with input saturation using fuzzy output control, and the problem of saturation is solved by approximation with a smooth function. Combining fuzzy logic systems and a small-gain approach, Zhou et al. [32] considered the problem of input saturation for single-input and single-output nonlinear systems with the nonstrict-feedback form. To solve the input saturation issue in MIMO nonlinear time-delay systems, a fuzzy sliding-mode control is presented [33]. While all of the above studies have made progress and achieved good results, the problem of an "explosion of complexity" needs to be further investigated. Moreover, the tracking control of FJ robot systems with input saturation also needs to be taken into account in practice.
Inspired by the above research, we present an adaptive fuzzy tracking control system for single-link FJ robots by combining the backstepping technique with DSC design. In order to solve the issue of input saturation that is nonsmooth in the system, we choose a smooth function to approximate it such that the backstepping technique can be utilized to design the controller. FLSs are applied to approximate unknown continuous functions. Adaptive DSC design is used to overcome the problem of the "explosion of complexity" by introducing auxiliary first-order filters. Lyapunov stability analysis shows that the uniform boundedness of all signals within the closed-loop system is guaranteed. The main contributions of this paper could be summarized in two parts:
1) An adaptive fuzzy DSC control strategy is presented for single-link flexible-joint robot systems with input saturation;
2) Only one adaptive law is designed by estimating the maximum value of the square of the weight vector norm. In this way, the structure of the designed controller is simple and the computational burden is significantly reduced.
It is shown that the proposed control scheme can guarantee the semi-global uniform ultimate boundedness of all signals in the closed-loop system. A comparison is conducted to show that the improved DSC method can reduce the computational burden by almost two thirds in comparison with the standard DSC method.
The remainder of this paper is organized as follows. Problem formulation and preliminaries are given in Section Ⅱ. Adaptive fuzzy control design using DSC and stability analysis is presented in Section Ⅲ. Section Ⅳ provides simulation results to show the effectiveness of the proposed scheme. The conclusions are included in Section Ⅴ.
Ⅱ.
PROBLEM FORMULATION AND PRELIMINARIES
Throughout this paper, ~(⋅)=(⋅)−^(⋅), where ^(⋅) is the estimate of (⋅), (⋅)T denotes transposition of a vector, ‖⋅‖ denotes the two-norm.
According to the Euler-Lagrangian equations, the single-link FJ robot dynamics and actuator dynamics can be obtained as follows [5], [36]:
ML2¨q+MgLsinq+F(˙q)+Kq=Kqm
(1)
J¨qm+B˙qm+K(qm−q)=u(v(t))
(2)
where q, ˙q, ¨q∈R denote the link position, velocity, and acceleration, respectively. M, g, L∈R are the mass of the link, gravity acceleration, and the length of the link, respectively. qm, ˙qm, ¨qm∈R denote the rotor angular position, velocity, and acceleration, respectively. K, J, B∈R represent the coefficients of joint stiffness, the joint flexibility, and the natural damping, respectively, where B is unknown. F(˙q)∈R represents friction. u(v(t)) denotes the characteristic of input saturation. v(t)∈R is the control input to be designed of the input saturation. u(⋅) denotes the plant input which is described by the following equation
where uM denotes the bound of the plant input u(t). It can be observed that the plant input u(t) is not smooth; as the result, the backstepping technique can not be utilized directly. In such a situation, we adopt a smooth function to approximate the saturation characteristic as below:
g(v)=uMtanh(vuM)=uMevuM−e−vuMevuM+e−vuM
(4)
with ρ(v) being the approximation error. Then, the u(v(t)) in (3) can be written as
u(v(t))=g(v)+ρ(v)=uMtanh(vuM)+ρ(v).
(5)
Since the sat function in (3) and tanh function in (4) are both bounded functions, ρ(v) in (5) is also a bounded function and its bound is
|ρ(v)|=|sat(v(t))−g(v)|≤uM(1−tanh(1))=D1.
(6)
For the convenience of controller design, we utilize the mean-value theorem to tackle the function g(v).
g(v)=g(v0)+∂g(v)∂v|v=vμ(v−v0)
(7)
where vμ=μv+(1−μ)v0 with 0<μ<1.
By choosing v0=0, one can obtain
g(v)=g(0)+∂g(v)∂v|v=μvv.
(8)
By initializing g(0)=0 and using the above equation, we can have the following result
g(v)=uMtanh(vuM)=∂g(v)∂v|v=μvv.
(9)
Letting h(v)=∂g(v)∂v|v=μv, the following equation satisfies
Since the tanh function and control input v in (10) are both bounded, h(v) in (10) is also a bounded function and its bound is
0<hm≤h(v)≤1.
(11)
To facilitate design, the following assumptions are needed.
Assumption 1 [37]: The desired signal yd is continuous and available, and [yd,˙yd,¨yd]T∈Ωd with the known compact set Ωd={[yd,˙yd,¨yd]T:y2d+˙y2d+¨y2d≤B0}∈R3, where B0 is a known positive constant.
Assumption 2: The minimum value of h(v) in (11) is known. That is, the constant hm is known and we can use it in the process of design.
Remark 1: Since the control input v we will design later is always bounded in the actual system, there exists a minimum value for h(v) and Assumption 2 is reasonable in the actual system. On the other hand, the boundary value of control input v can be obtained when the input saturation is not considered into. According to hm=1−tanh2(ˉvmax, the constant h_m can be obtained in the simulation, where \bar{v}_{\max} denotes the maximum value of v in the absence of input saturation, and u_M denotes the bound of the plant input u(t). The detailed explanation about h_m is illustrated in appendix.
Based on the above discussion and analysis, we transfer the system (1) and (2) with new state variables. Let x_1=q, \ x_2=\dot{q}, \ x_3=q_m and x_4=\dot{q}_m. Then, the robot dynamics and actuator dynamics of (1) and (2) can be described as follows:
The control objective is to design an adaptive fuzzy controller v for the single-link FJ robot system to guarantee that the system output y can track the desired trajectory y_d, and all the signals in the closed-loop system are bounded.
In this paper, we will utilize FLSs to approximate the unknown function f(x) and the results of approximation can be represented as
where W^*=[w^*_1, \dots, w^*_N]^T, \Psi(x)=[\psi_1(x), \dots, \psi_N(x)]^T.
Only one adaptive parameter needs to be updated in this paper, which reduces the computational burden significantly. The parameter \theta is defined as
Lemma 1 [31]: For a continuous unknown function f(x) defined on a compact set \Omega, there exists a fuzzy system W^T\Psi(x) such that for any given constant \varepsilon>0, the following inequality holds
In this section, we will attempt to design an adaptive DSC controller with FLSs for the single-link FJ system. The design of adaptive DSC is based on the following change of coordinates:
where x_1, x_i, y_d, \omega_i\in \mathbb{R}, i=2, 3, 4, \omega_i is the output of the first-order filter with \alpha_{i-1} as the input, and \alpha_{i-1} is an intermediate control. The first-order filter with time design constant \tau_i is defined as
The recursive design procedure contains 4 steps. At each recursive step i, the FLSs may be used to approximate unknown system dynamics, and then the virtual control law \alpha_i and the first-order filter are designed.
Step 1: Considering the first equation of system (12) using (16) and (18) gives
Based on y_2=\omega_2-\alpha_1, \dot{\omega}_2=\frac{\alpha_1-\omega_2}{\tau_2}=-\frac{y_2}{\tau_2} is satisfied. And then the time derivative of y_2 can be obtained as
Define \vert k_1\dot{s}_1-\ddot{y}_d\vert=\vert -\dot{\alpha}_1\vert\le\zeta_2(\dot{s}_1, \ddot{y}_d), where the continuous function \zeta_2(\dot{s}_1, \ddot{y}_d)=\zeta_2(s_1, s_2, y_2, y_d, \dot{y}_d, \ddot{y}_d). Further, we have
For clarity of design, \zeta_2(s_1, s_2, y_2, y_d, \dot{y}_d, \ddot{y}_d) is abbreviated as \zeta_2 in the following design. By combining (28) with (29) and using the Young's inequality, one has
where \tilde{\theta}=\theta-\hat{\theta}, \hat{\theta} is the estimate of \theta which is defined in (14) and \gamma is a positive design constant. Taking the time derivative of V_{s_2} yields
Based on y_3=\omega_3-\alpha_2, \dot{\omega}_3=\frac{\alpha_2-\omega_3}{\tau_3}=-\frac{y_3}{\tau_3} is satisfied. And then the time derivative of y_3 can be obtained as
By following the similar process to step 1, we define \vert -\dot{\alpha}_2\vert\le\zeta_3(s_1, s_2, s_3, y_2, y_3, \hat{\theta}, y_d, \dot{y}_d, \ddot{y}_d). Further, one has
Let \zeta_3 represent \zeta_3(s_1, s_2, s_3, y_2, y_3, \hat{\theta}, y_d, \dot{y}_d, \ddot{y}_d) for clarity. Combining (51) with (52) and using Young's inequality yields
We define \vert k_3\dot{s}_3-\ddot{\omega}_3\vert=\vert -\dot{\alpha}_3\vert\le\zeta_4(\bar{s}_4, \bar{y}_4, \hat{\theta}, y_d, \dot{y}_d, \ddot{y}_d), where \bar{s}_4=[s_1, s_2, s_3, s_4], \bar{y}_4=[y_2, y_3, y_4]. Based on (65), one has
Simplify \zeta_4(\bar{s}_4, \bar{y}_4, \hat{\theta}, y_d, \dot{y}_d, \ddot{y}_d) as \zeta_4 for the convenience of design. Combining (65) with (66) and using Young's inequality gives
where f_2=J^{-1}\Big(-Bx_4-K(x_3-x_1)\Big)-\dot{\omega}_4 denotes a continuous function. Then, a fuzzy system W^T_2\Psi_2(X_2) is employed to approximate f_2 such that for any given \varepsilon_2>0, f_2 is written as
where \delta_2(X_2) is the approximation error with \varepsilon_2 being the bound of \delta_2(X_2). Substituting (73) into (72), using Young's inequality, and repeating the steps similar to (42) and (43) yields
Remark 2: It is worth noting that we utilize FLSs to approximate the unknown continuous function f_1 and known continuous function f_2 in Step 2 and this step, respectively. It is better not to use fuzzy logic systems to estimate the known continuous function f_2 in this step because of the existence of approximation error. However, the impact of this processing on system performance is negligible for because FLSs can make very accurate approximations. The main reason for this is to make the design similar to that in Step 2 and to make the form of the controller simple.
where \bar{k}_1=k_1-2, \bar{k}_2=k_2-\frac{K^2}{ML^2}-\frac{3}{4}, \bar{k}_3=k_3-2-\frac{1}{2ML^2}, \bar{k}_4=k_4-\frac{5}{4}, \bar{\tau}_2=\frac{1}{\tau_2}-\frac{5}{4}, \bar{\tau}_3=\frac{1}{\tau_3}-1-\frac{1}{2ML^2}, \bar{\tau}_4=\frac{1}{\tau_4}-\frac{5}{4}.
For any B_0>0 and p>0, the sets \Omega_d=\{(y_d, \dot{y}_d, \ddot{y}_d):y^2_d+\dot{y}^2_d+\ddot{y}^2_d\le B_0\} and \Omega_i=\{[\bar{s}^T_i, \bar{y}^T_i, \hat{\theta}]^T:\sum^i_{j=1}V_j\le p\}, i=1, 2, 3, 4 are compact in \mathbb{R}^3 and \mathbb{R}^{2i}, respectively. Therefore, \zeta_j has a maximum T_j on \Omega_j\times\Omega_i, j=2, 3, 4.
Subsequently, design the following adaptation law as
Now, the fuzzy DSC design procedure is complete. The main results are summarized as follows.
Theorem 1: Consider the closed-loop flexible-joint robot system consisting of (1) and (2) with Assumptions 1 and 2, the virtual control signals (22), (45), and (59), the actual controller (75), and the adaptive law (79); Moreover, assume that the unknown continuous function f_1 and f_2 can be approximated by FLSs when the approximation errors are bounded. For any given bounded initial conditions, all the signals in the closed-loop system are bounded, and the output of the system can track the desired trajectory with the tracking error converging to a small domain around the origin.
Proof: By using the relationship of \hat{\theta}=\theta-\tilde{\theta} and Young's inequality, one has
Remark 3: The choice of design parameters follows the principles of the subsystem. For example, for the design of parameter k_1, equation (82) is the final form we expect. By combining equation (77) with (78), we have -\bar{k}_1s^2_1\le -\alpha_0\frac{s^2_1}{2}, and eventually we can obtain k_1\ge 2+\frac{\alpha_0}{2}. The other design parameters are the same as this. During the simulation process, we found that the design parameter k_2 has greatest influence on system performance and better performance can be obtained by selecting larger k_2. Furthermore, design parameters \tau_i~(i=2, 3, 4) need to be carefully chosen. If the selected parameter \tau_i is too large, it will cause the designed controller to oscillate. Conversely, if the selected parameter \tau_i is too small, it will result in a large controller output. Other design parameters such as a_1, a_2, h_m also need to be adjusted accordingly.
Let \alpha_0>C/p, where a detailed description of p is made following (78). Then \dot{V}\le0 on V=p. That is, V\le p is a invariant set, i.e., if V(0)\le p, then V(t)\le p, for all t\ge0. By solving the inequality of (82), we can obtain
Therefore, all signals in the closed-loop system, i.e., s_i, y_j, \tilde{\theta}(i=1, 2, 3, 4, j=2, 3, 4) are semi-globally uniformly ultimately bounded. Since x_1=s_1+y_d, x_1 is also bounded from the boundedness of s_1 and y_d. The boundedness of x_2 follows from boundedness of \alpha_1(\dot{y}_d, s_1) and the fact that x_2=s_2+y_2+\alpha_1. Similarly, the boundedness of x_3 and x_4 can be obtained. The boundedness of \hat{\theta} can be ensured from the boundedness of \tilde{\theta} and \theta. From (75), because v is a function of s_4, \hat{\theta} and \Psi_2(X_2), which are all bounded, v is also bounded. Moreover, by appropriately choosing the design parameters, such as increasing \gamma or decreasing a_1 , a_2, we ensure that the tracking error converges to a small neighborhood around 0 such that the output of the system can track the desired trajectory very well.
Ⅳ.
SIMULATION RESULTS
To illustrate the effectiveness of the proposed approach, consider the following dynamics of the single-link FJ robot system:
The friction term is selected as F(\dot{q})=B_1\cos\dot{q}. Table Ⅰ gives the system parameters and the desired reference trajectory is given as y_d=0.5\big(\sin(t)+\sin(0.5t)\big).
Table
Ⅰ.
PARAMETERS OF THE SINGLE-LINK FJ ROBOT SYSTEM
For the FLSs, the number of the fuzzy rules N is selected as N=7 and the Gaussian function \psi_i(x) is chosen as \psi_i(x)=\exp[-(x-\mu_i)^T(x-\mu_i)/(\eta^2_i)], where the center vector \mu_i=[-3\ -2\ -1\ 0\ 1\ 2\ 3] and the width of the Gaussian function \eta_i=1, i=1, 2, \ldots, N.
We choose design parameters as \alpha_0=\gamma=0.5, h_m=0.03, \tau_2=\tau_3=\tau_4=0.002, k_1=2.3, k_2=17, k_3=k_4=6, a_1=0.01, a_2=25, initial state values q=0.1, \dot{q}=0.2, q_m=0.5, \dot{q}_m=0.5, the initial values of the first-order filters are \omega_2=\omega_3=\omega_4=0.5, the boundary of the plant input is selected as u_M=2 and the initial value of the square for the weight vector norm is chosen as \theta=5.
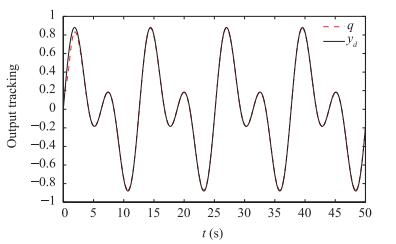
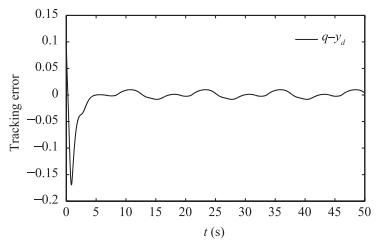
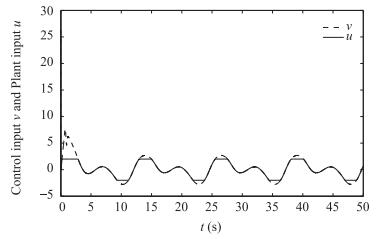
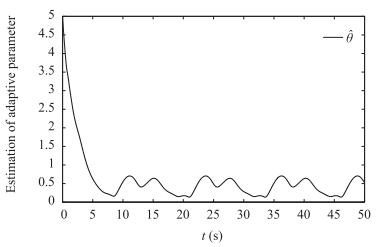
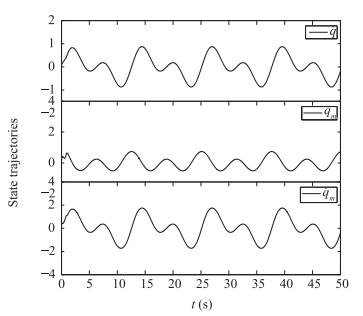
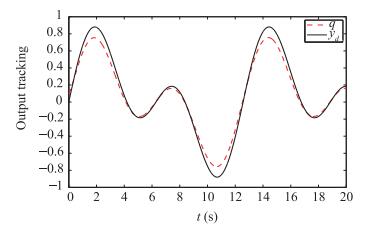
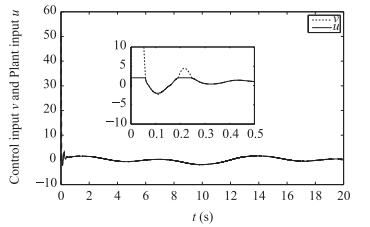
The results of the simulation are shown in Figs. 1-5. It can be seen from Figs. 1 and 2 that the system output q can track the desired trajectory y_d well. Fig. 3 shows the control input v and plant input u, respectively. We can observe that the plant input u satisfies \vert u\vert\le u_M, which indicates the effectiveness of our proposed approach. The response curve of adaptive parameter is illustrated in Fig. 4. Fig. 5 shows that the state signals are bounded.
Figure
1.
Trajectories of the link position q and the desired trajectory y_d.
To further demonstrate the main contribution of our proposed control scheme, we apply the standard DSC method [37] which updates the weight vector to the same single-link FJ robot system in (86).
Similar to the design procedure in Section Ⅲ, in order to save space, we only give the final design results. The virtual controller and actual controller are chosen as
For fairness of comparison, we use the same system parameters and the same initial conditions in simulation. FLSs and the desired reference signal are the same as before. Design parameters are chosen as \Gamma_1=\Gamma_2=\text{diag}(0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5), \sigma_1=\sigma_2=0.1, k_1=2.5, k_2=5, k_3=2.5, k_4=3, and \tau_2=\tau_3=\tau_4=0.02. Other design parameters are consistent with the above design parameters. The initial values of the weight vector are chosen as W_1=W_2=[0.5;0.5;0.5;0.5;0.5;0.5;0.5].
The results of the simulation using standard DSC which updates the weight vector are shown in Figs. 6 and 7. Considering the running time of the program, the simulation time is set to 20 s since long simulation time will consume more time than the improved DSC scheme. Trajectories of the link position q and the desired trajectory y_d using the standard DSC method are shown in Figs. 6 and 7, which illustrate the control input v and plant input u of the single-link robot. It is obvious that the control performance of our proposed improved DSC scheme is better than the standard DSC method comparing Figs. 1-3 with Figs. 6 and 7.
Figure
6.
Trajectories of the link position q and the desired trajectory y_d by using standard DSC method.
Remark 4: It should be noted that the objective of comparison experiments is to illustrate the fact that only one adaptation parameter can reduce the computational burden significantly. The time complexity of the two control schemes rather than the control performance is the main concern here.
The solving time and total running time of the improved DSC scheme, which updates the maximum value of weight vector norm, and standard DSC method, which updates the weight vector, are shown in Table Ⅱ and Table Ⅲ.
Table
Ⅱ.
STANDARD DSC TIME CONSUMING VS. IMPROVED DSC TIME CONSUMING: SOLVING TIME (UNIT: S)
Remark 5: The solving time and total running time are obtained under the condition that the program is run three times and averaged. The program runs on MATLAB R2014a, which is installed on a Win 10 OS equipped with 4 GB RAM and an Intel Core i5-6300HQ processor. The solving time refers to the time it takes for the algorithm to solve the problem, which represents the computational complexity of the algorithm. Total running time includes solving time and subsequent processing time. In fact, we expect to shorten the solving time to reduce the computational burden, and we prefer to reduce the total running time to quickly select design parameters to optimize control performance.
It can be observed from Table Ⅱ that the improved DSC method is almost three times faster than the standard DSC method in terms of simulation time. We can see that the total running time of the improved DSC method is much less than standard DSC method from Table Ⅲ. With the increase of simulation time, the time consumed also increases exponentially for the standard DSC method. Moreover, the advantage of the improved method is more obvious as system order and fuzzy rules increase. From the results of the comparison study, it can be concluded that the proposed scheme using only one adaptive parameter can reduce the computational burden significantly.
Ⅴ.
CONCLUSION
This paper considers the tracking control problem of single-link flexible-joint robot system with input saturation using an adaptive fuzzy DSC, where the saturation problem is solved by a smooth function with the help of the mean-value theorem. The problem of an "explosion of complexity" is overcome by the adaptive DSC. The developed adaptive fuzzy control scheme can guarantee that all signals in the closed-loop system are uniformly ultimately bounded. The simulations on a single-link robot system show that the system output tracks the desired trajectory well under the input saturation. Comparison studies show that the proposed scheme can reduce the computational burden by nearly two-thirds in comparison with the standard method.
It should be pointed out, however, that our proposed DSC scheme does not consider the errors caused by the introduction of filters, which may limit performance of the system. Future research may investigate this potential problem associated with the DSC approach.
APPENDIX.
SUPPLEMENTARY EXPLANATION OF CONSTANT h_m
where v^+_{\max} denotes the maximum value of input v under the condition that v is greater than zero in the simulation. In the actual controller, the input v is always bounded. Therefore, we can choose a bigger v_{\max} to determine h_{m2}.
Case 2: When v<0, the results are similar to case 1. That is, when 0<v\le u_M, h_m can be determined as h_{m1}. When v>u_M, h_m can be determined as
K. Melhem and W. Wang, "Global output tracking control of flexible joint robots via factorization of the manipulator mass matrix, " IEEE Transactions on Robotics, vol. 25, no. 2, pp. 428-437, 2009. doi: 10.1109/TRO.2009.2012016
[3]
J. R. Forbes and C. J. Damaren, "Design of optimal strictly positive real controllers using numerical optimization for the control of flexible robotic systems, " Journal of the Franklin Institute, vol. 348, no. 8, pp. 2191-2215, 2011. doi: 10.1016/j.jfranklin.2011.06.013
[4]
J. Kim and E. A. Croft, "Full-state tracking control for flexible joint robots with singular perturbation techniques, " IEEE Transactions on Control Systems Technology, doi: 10.1109/TCST.2017.2756962.
[5]
A. C. Huang and Y. C. Chen, "Adaptive sliding control for single-link flexible-joint robot with mismatched uncertainties, " IEEE Transactions on Control Systems Technology, vol. 12, no. 5, pp. 770-775, 2004. doi: 10.1109/TCST.2004.826968
[6]
A. D. Luca, B. Siciliano, and L. Zollo, "Pd control with on-line gravity compensation for robots with elastic joints: Theory and experiments, " Automatica, vol. 41, no. 10, pp. 1809-1819, 2005. doi: 10.1016/j.automatica.2005.05.009
[7]
J. S. Bang, H. Shim, K. P. Sang, and H. S.Jin, "Robust tracking and vibration suppression for a two-inertia system by combining backstepping approach with disturbance observer, " IEEE Transactions on Industrial Electronics, vol. 57, no. 9, pp. 3197-3206, 2010. doi: 10.1109/TIE.2009.2038398
[8]
S. K. Min and S. L. Jin, "Adaptive tracking control of flexible-joint manipulators without overparametrization, " Journal of Robotic Systems, vol. 21, no. 7, pp. 369-379, 2004. doi: 10.1002/(ISSN)1097-4563
[9]
W. Chang, Y. Li, and S. Tong, "Adaptive fuzzy backstepping tracking control for flexible robotic manipulator, " IEEE/CAA J. Autom. Sinica, doi: 10.1109/JAS.2017.7510886, 2017.
[10]
D. Swaroop, J. K. Hedrick, P. P. Yip, and J. C. Gerdes, "Dynamic surface control for a class of nonlinear systems, " IEEE Transactions on Automatic Control, vol. 45, no. 10, pp. 1893-1899, 2002. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201202019
[11]
W. Si and X. Dong, "Adaptive neural dsc for nonlinear switched systems with prescribed performance and input saturation, " IEEE/CAA J. Autom. Sinica, doi: 10.1109/JAS.2017.7510661, 2017.
[12]
S. Su, "Output-feedback dynamic surface control for a class of nonlinear non-minimum phase systems, " IEEE/CAA J. Autom. Sinica, vol. 3, no. 1, pp. 96-104, 2016. doi: 10.1109/JAS.2016.7373767
[13]
H. Wang, P. X. Liu, and B. Niu, "Robust fuzzy adaptive tracking control for nonaffine stochastic nonlinear switching systems, " IEEE Transactions on Cybernetics, vol. 48, no. 8, pp. 2462-2471, 2018. doi: 10.1109/TCYB.2017.2740841
L. X. Wang and J. M. Mendel, "Fuzzy basis functions, universal approximation, and orthogonal least-squares learning, " IEEE Transactions on Neural Networks, vol. 3, no. 5, pp. 807-814, 1992. doi: 10.1109/72.159070
[16]
L. Jin, S. Li, H. M. La, and X. Luo, "Manipulability optimization of redundant manipulators using dynamic neural networks, " IEEE Transactions on Industrial Electronics, vol. 64, no. 6, pp. 4710-4720, 2017. doi: 10.1109/TIE.2017.2674624
[17]
Y. Zhang, S. Li, J. Gui, and X. Luo, "Velocity-level control with compliance to acceleration-level constraints: A novel scheme for manipulator redundancy resolution, " IEEE Transactions on Industrial Informatics, vol. 14, no. 3, pp. 921-930, 2018. doi: 10.1109/TII.2017.2737363
[18]
S. C. Tong, X. L. He, and H. G. Zhang, "A combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control, " IEEE Transactions on Fuzzy Systems, vol. 17, no. 5, pp. 1059-1069, 2009. doi: 10.1109/TFUZZ.2009.2021648
H. Chaoui, W. Gueaieb, M. Biglarbegian, and M. C. E. Yagoub, "Computationally efficient adaptive type-2 fuzzy control of flexible-joint manipulators, " Robotics, vol. 2, no. 2, pp. 66-91, 2013. doi: 10.3390/robotics2020066
[21]
X. Luo, M. Zhou, S. Li, Y. Xia, Z. H. You, Q. Zhu, and H. Leung, "Incorporation of efficient second-order solvers into latent factor models for accurate prediction of missing QoS data, " IEEE Transactions on Cybernetics, vol. 48, no. 4, pp. 1216-1228, 2018. doi: 10.1109/TCYB.2017.2685521
[22]
S. Li, Z. H. You, H. Guo, X. Luo, and Z. Q. Zhao, "Inverse-free extreme learning machine with optimal information updating, " IEEE Transactions on Cybernetics, vol. 46, no. 5, pp. 1229-1241, 2016. doi: 10.1109/TCYB.2015.2434841
[23]
P. Sun and Z. Yu, "Tracking control for a cushion robot based on fuzzy path planning with safe angular velocity, " IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 610-619, 2017. doi: 10.1109/JAS.2017.7510607
[24]
X. Luo, J. Sun, Z. Wang, S. Li, and M. Shang, "Symmetric and nonnegative latent factor models for undirected, high dimensional and sparse networks in industrial applications, " IEEE Transactions on Industrial Informatics, vol. 13, no. 6, pp. 3098-3107, 2017. doi: 10.1109/TII.2017.2724769
S. Li, M. C. Zhou, X. Luo, and Z. H. You, "Distributed winner-takeall in dynamic networks, " IEEE Transactions on Automatic Control, vol. 62, no. 2, pp. 577-589, 2017. doi: 10.1109/TAC.2016.2578645
[27]
H. Yang and J. Liu, "An adaptive rbf neural network control method for a class of nonlinear systems, " IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 457-462, 2018. doi: 10.1109/JAS.2017.7510820
Y. Yang, J. Tan, and D. Yue, "Prescribed performance control of onedof link manipulator with uncertainties and input saturation constraint, " IEEE/CAA J. Autom. Sinica, doi: 10.1109/JAS.2018.7511099, 2018.
[30]
Y. Li, S. Tong, and T. Li, "Hybrid fuzzy adaptive output feedback control design for uncertain mimo nonlinear systems with time-varying delays and input saturation, " IEEE Transactions on Fuzzy Systems, vol. 24, no. 4, pp. 841-853, 2016. doi: 10.1109/TFUZZ.2015.2486811
[31]
Y. Li, S. Tong, and T. Li, "Composite adaptive fuzzy output feedback control design for uncertain nonlinear strict-feedback systems with input saturation, " IEEE Transactions on Cybernetics, vol. 45, no. 10, pp. 2299-2308, 2015. doi: 10.1109/TCYB.2014.2370645
[32]
Q. Zhou, H. Li, C. Wu, L. Wang, and C. K. Ahn, "Adaptive fuzzy control of nonlinear systems with unmodeled dynamics and input saturation using small-gain approach, " IEEE Transactions on Systems Man & Cybernetics Systems, vol. 47, no. 8, pp. 1979-1989, 2017. http://ieeexplore.ieee.org/document/7572123/
[33]
X. Zhao, H. Yang, W. Xia, and X. Wang, "Adaptive fuzzy hierarchical sliding-mode control for a class of mimo nonlinear time-delay systems with input saturation, " IEEE Transactions on Fuzzy Systems, vol. 25, no. 5, pp. 1062-1077, 2017. doi: 10.1109/TFUZZ.2016.2594273
[34]
R. Bai, "Adaptive sliding-mode control of automotive electronic throttle in the presence of input saturation constraint, " IEEE/CAA J. Autom. Sinica, vol. 5, no. 4, pp. 878-884, 2018. doi: 10.1109/JAS.2018.7511147
[35]
Z. Fu, W. Xie, S. Rakheja, and J. Na, "Observer-based adaptive optimal control for unknown singularly perturbed nonlinear systems with input constraints, " IEEE/CAA J. Autom. Sinica, vol. 4, no. 1, pp. 48-57, 2017. doi: 10.1109/JAS.2017.7510322
[36]
S. J. Yoo, J. B. Park, and Y. H. Choi, Adaptive dynamic surface control of flexible-joint robots using self-recurrent wavelet neural networks, " IEEE Transactions on Systems Man & Cybernetics, Part B Cybernetics, vol. 36, no. 3, pp. 1342-1355, 2006. http://europepmc.org/abstract/MED/17186810
[37]
B. Ren, P. P. San, S. S. Ge, and H. L. Tong, "Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis, " in Proc. 2009 American Control Conference, St. Louis, MO, USA, 2009, pp. 4482-4487.
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330
Song Ling, Huanqing Wang and Peter X. Liu, "Adaptive Fuzzy Dynamic Surface Control of Flexible-Joint Robot Systems With Input Saturation," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 97-107, Jan. 2019. doi: 10.1109/JAS.2019.1911330




 DownLoad:
DownLoad:
 DownLoad:
DownLoad:






 DownLoad:
DownLoad:





