A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Citation:
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Citation:
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Daniele Carnevale received the Laurea and the Ph.D. degrees from the Università di Roma Tor Vergata (Italy) where he is an Assistant Professor in control engineering from 2008. His research interests are mainly devoted to nonlinear control, hybrid systems, plasma fusion, observer design, robotics for surgery and mechatronic systems. He is in charge of ENEA-EUROFUSION projects on plasma control systems design and testing on different Tokamak machines (FTU, TCV) and serves as an Associate Editor of the IEEE-ECC editorial board. (e-mail: daniele.carnevale@uniroma2.it)
Corrado Possieri received the bachelor's and master's degrees in medical engineering and the Ph.D. degree in computer science, control and geoinformation from the Università di Roma Tor Vergata, Italy, in 2011, 2013, and 2016, respectively. From September 2015 to June 2016, he visited the University of California, Santa Barbara (UCSB). His current research interests include hybrid and nonlinear systems and the application of computational algebraic geometry techniques to control problems
Antonio Tornambè is currently Full Professor of Control Theory at Università di Roma Tor Vergata. His research interests are in control theory for linear and nonlinear systems. He is the co-author of "Discrete-Event System Theory:an Introduction", WSP, Singapore, 1995, "Mathematical Methods for System Theory", WSP, Singapore, 1998, and "Symmetries and Semi-invariants in the Analysis of Nonlinear Systems", Springer, London, 2011.(e-mail: tornambe@disp.uniroma2.it)
In this paper, it is shown that the performances of a class of high-gain practical observers can be improved by estimating the time derivatives of the output up to an order that is greater than the dimension of the system, which is assumed to be in observability form and, possibly, time-varying. Such an improvement is achieved without increasing the gain of the observers, thus allowing their use in a wide variety of control and identification applications.
Aproblem found in several control and identification applications is the reconstruction of the unmeasurable state variables by the measures of the accessible ones [1]-[9]. This task has been extensively studied for both linear and nonlinear systems. For the formers, a rather standard solution is given by the Luenberger observer and the Kalman filter [10], [11]. On the other hand, when dealing with nonlinear systems, the problem of designing an observer is much more challenging. Many attempts have been made to provide a general framework that allows the structured design of observers. For instance, in [5], [12], [13], the observability problem is addressed by considering observers yielding error dynamics that, possibly after some coordinates transformation, become linear and spectrally assignable. Another technique that is widely used in industrial and manufacturing processes is the extended Kalman filter, whose design is based on a local linearization of the system around a reference trajectory [14]. A remarkable observer design technique has been proposed in [15], where Lyapunov-like conditions have been given for the existence of a nonlinear observer yielding asymptotically stable error dynamics (for more recent procedures allowing the structured design of observers, see [16], [17]).
The observer proposed in this paper belongs to the class of high-gain practical observers. Assuming that the system is in observability form and that the time derivatives of the output are bounded, such observers provide estimates of the state of the system yielding arbitrarily small estimation error with arbitrarily fast decay rate. The use of high-gains is a classical tool that has been extensively employed to compensate nonlinearities in the system: for instance in [18] a high-gain feedback stabilizing control algorithm is proposed for a class of nonlinear systems, in [19]-[22] it is shown how high-gain observers can be exploited to estimate the state of a nonlinear system, while in [23] it is shown how high-gain observers can be used in nonlinear feedback control.
The main objective of this paper is to show that, if the high-gain practical observer is designed to estimate the time derivatives of the output up to an order that is greater than the dimension of the state of the system (thus leading to the adjective over-sized), then the estimation error can be made smaller without increasing the gain. Thanks to their appealing properties (especially the fact that they do not require excessively large values of the observer gain), these observers have been already proved useful in several control and identification applications [24]-[28]. The performances of over-sized and normal-sized high-gain practical observers are compared by estimating the vertical velocity of an electron beam by measures collected at the Frascati Tokamak upgrade (FTU) facility.
Ⅱ.
OBSERVABILITY FOR NONLINEAR SYSTEM
Consider the single-output, nonlinear system
˙x=f(t,x)
(1a)
y=h(x)
(1b)
where f:R×RN→RN and h:RN→RN are in Ck for some sufficiently large k∈Z, k>0, x(t)∈RN denotes the state of system (1), and y(t)∈R denotes its output. Let ϕ(t,x) denote the solution of system (1) at time t∈R, t≥0, starting at x, i.e., ϕ(0,x)=x for all x∈RN. Assume that ϕ(t,x) exists and is unique for all t∈R, t≥0, and x∈RN. System (1) is observable if any pair of different states x,ξ∈RN is distinguishable, i.e., for each x,ξ∈RN, there exists t∈R, t≥0, such that h(ϕ(t,x))≠h(ϕ(t,ξ)).
In this paper, single-output, (possibly, time varying) nonlinear systems that can be written in the following canonical observability form are considered:
˙y0=y1⋮
(2a)
˙yN−1=yN
(2b)
˙yN=ˉp(t,ye,N)
(2c)
y=y0
(2d)
ye,N=[y0⋯yN]T, ¯p:R×RN+1→R is Ck for some sufficiently large k∈Z, k>0, and ye,N(t) is assumed to exist ∀t≥0. By construction, system (2) is observable [29].
The goal of this paper is to design an observer for system (2). Such a goal can be pursued by using classical high-gain practical observers (see, for instance, [20] and Section Ⅲ where the properties of such a class of observers are recalled). One of the main goals of this paper is to show that the performances of such observers can be improved by estimating, through another high-gain observer, more than N time derivatives of the output (i.e., "oversizing" its state), without necessarily decreasing ε, as usual in high-gain observer design, that has several undesirable effects [4].
Ⅲ.
NORMAL-SIZED HIGH-GAIN "PRACTICAL" OBSERVERS
In this section, some results about the standard normal-sized high-gain practical observers introduced in [20] are revised.
Let the polynomial λN+1+ˉκ1λN+⋯+ˉκNλ+ˉκN+1 be Hurwitz and let 0<ˉε≪1 be a sufficiently small parameter. Under the assumptions of Theorems 2 and 3 of [20] (essentially, boundedness of ˉp(t,ye,N(t)) as a function of t), a high-gain practical observer for (2) is given by
˙ˆy0=ˆy1+ˉκ1ˉε(y0−ˆy0)⋮
(3a)
˙ˆyN−1=ˆyN+ˉκNˉεN(y0−ˆy0)
(3b)
˙ˆyN=ˉκN+1ˉεN+1(y0−ˆy0)
(3c)
where ˆye,N=[ˆy0⋯ˆyN]T is an estimate of ye,N.
Define the estimation error ˜ye,N:=ye,N−ˆye,N, whose dynamics are given by
The following two lemmas and theorem, reported here for completeness, state that the output of the high-gain observer given in (3) is a practical estimate of the state of system (2).
Lemma 1 [20]: Let system (4) be given. There exists an ˉε-dependent matrix ˉEˉε:=diag{1,ˉε,…,ˉεN}, such that
Lemma 2 [20]: Let Δ be the matrix defined in Lemma 1 and let ˉP be the solution of the Lyapunov equation
ΔTˉP+ˉPΔ=−I.
(5)
Then, setting ˉPˉε=ˉETˉεˉPˉEˉε, one has that
AT1ˉPˉε+ˉPˉεA1=−1ˉεˉETˉεˉEˉεBT1ˉPˉε=1ˉεΓTˉPˉEˉε
where ˉETˉεˉEˉε is a positive definite diagonal matrix.
Theorem 1 [20]: Consider the error dynamics given in (4). If there exists μ∈R, μ>0, such that
˜yˉε(t)∈{˜yˉε:˜yTˉεˉP˜yˉε≤4μ2ˉε2N+2||ˉP||3}∀t≥ˉT
(6)
where ˜yˉε=ˉEˉε˜y=[˜y1ˉε˜y2⋯ˉεN˜yN]T.
Ⅳ.
OVER-SIZED HIGH-GAIN OBSERVERS
Consider now the following system:
˙ξ0=ξ1+κ1ε(y0−ξ0)⋮
(7a)
˙ξN−1=ξN+κNεN(y0−ξ0)
(7b)
˙ξN=ξN+1+κN+1εN+1(y0−ξ0)⋮
(7c)
˙ξN+h=κN+h+1εN+h+1(y0−ξ0)
(7d)
˘ye,N=[IN+10h]ξ
(7e)
where κi, i=1,…,N+h, are chosen so that the polynomial λN+h+1+κ1λN+h+… is Hurwitz, Iℓ denotes the ℓ-dimensional identity matrix, 0ℓ denotes the ℓ-dimensional zero matrix and 0<ε≪1 is a sufficiently small parameter whose role is the same as of the parameter ˉε employed in (3).
The goal of this section is to show that the signal ˘ye,N is an estimate of the signal ye,N and that the L2 norm, over some suitably defined interval I, of the estimation error ˇye,N=ye,N−˘ye,N is lower than the one of ˜ye,N. By (2) and (7), the dynamics of the estimation error ˇye,N are given by
˙ˇye,N=A2ˇye,N+B2(ˉp(t,ye,N−1)−ξN+1)
where
A2=[−κ1ε1⋯0⋮⋮⋱⋮−κNεN0⋯1−κN+1εN+10⋯0],B2=[0⋮1]
and ξN+1 is the output of the following linear system
Proof: The expressions in (9) follow directly from the definition of the matrices Φi, i=1,…,4, and of the matrix Eε. The expressions in (10) follows directly from the definition of the matrix exponential exp(Aτ):=∑∞k=1Akτkk!.
Lemma 4: All the eigenvalues of the matrix Φ of (9), where ˉκi, i=0,…,N+h+1, are the coefficients given in (7), have negative real part.
Proof: By construction, Φ has the same characteristic polynomial of the companion matrix of the polynomial λN+h+1+ˉκ1λN+h+⋯+ˉκN+hλ+ˉκN+h+1, which is, by definition, Hurwitz. Hence, all the eigenvalues of the matrix Φ have negative real part.
Since, by Lemma 4, the matrix Φ is Hurwitz, then there exists a symmetric and positive definite solution P to the Lyapunov equation [30]
ΦTP+PΦ=−I.
(11)
Thus, letting Pε=ETεPEε, one has that
ΘTPε+PεΘ=−1εETεEε
(12a)
ΛTPε=1εΨTPEε
(12b)
where ETεEε is a positive-definite diagonal matrix.
The following theorem and corollary state that ˘ye,N is a practical estimate of the signal ye,N (i.e., the error ˇye,N can be made arbitrarily small by choosing ε sufficiently small).
Theorem 2: Consider the error dynamics given in (8). Let P be the solution of the Lyapunov equation (11). If there exists a constant μ>0 such that |ˉp(t,ye,N(t))|<μ, for all times t≥0, then there exists a time T≥0 such that
ηε(t)∈{ηε:ηTεPηε≤4μ2ε2N+2||P||3}∀t≥T
(13)
where ηε=Eεη.
Proof: Let Pε=ETεPEε. Consider the Lyapunov function
V(η)=ηTPεη
which is positive-definite, because the matrix Pε is positive-definite for all ε. Thus, computing the time derivative of V(η) along the solutions of (8), one has that
where ηε:=Eεη. Hence, under the assumption that |ˉp|<μ, and by considering that ||Ψ||=εN+1, then
˙V(η)≤−1ε(||ηε||2−2μεN+1||P||||ηε||).
Hence, for any ηε such that ||ηε||>2μεN+1||P||, one has that ˙V<0. Thus, since V(η)=ηTPεη=ηTETεPEεη=ηTεPηε, then V(η)≤||ηε||2||P||. Thus, since ˙V is negative definite for each ηε such that ||ηε||>2μεN+1||P||, there exists a time T≥t0, such that (13) holds [31].
Corollary 1: Let the assumptions of Theorem 2 hold. The estimation error ˇye,N(t) can be made arbitrarily small, for all times t≥T, where T is a sufficiently large time.
Proof: Let V be the Lyapunov function used in the proof of Theorem 2. Consider that, by the definition of the vector ηε,
||ηε||=||Eε[ˇye,Nζ]||≥||ˇEεˇye,N||
(14)
where ˇE=diag{1,ε,…,εN}. Since Eε is nonsingular, one has that ηε=0 if and only if η=0. Thus, by considering that, by (13), there is a sufficiently large T such that
||ηε(t)||≤4λ_−1μ2ε2N+2||P||3∀t≥T
where λ_=λminP, there exists a time T such that ||ˇye,N(t)||≤4λ_−1μ2ε2N+2||P||3,∀t≥T. Therefore, the estimation error ˇye,N(t) can be made arbitrarily small, by decreasing ε.
In the remainder of this section, the estimates ˆye,N and ˘ye,N of ye,N are compared. To carry out such a comparison, the following assumption is made.
Assumption 1: Let the coefficients ˉκ1,…,ˉκN and κ1,…,κN+h be chosen so that the matrices ˉP and P, obtained by solving (5) and (11), respectively, are such that ||P||=||ˉP||,λminP=λminˉP, and let ˉε=ε.
Assumption 1 is made in order to guarantee that the "gain" of the high-gain observer given in (3) is the same "gain" of the high-gain observer given in (7). The following proposition and corollary show that the error ˇye,N obtained by using the over-sized observer (7) is lower than the error ˜ye,N, obtained by using the normal-sized observer (7), under Assumption 1.
Proposition 1: Let Assumption 1 hold, and let the assumptions of Theorems 1 and 2 hold. Let ˜ye,N(t) be the state of system (4) at time t and let ˇye,N(t) be the output of system (8) at time t, respectively. Then, there exists a sufficiently large time T, and a positive real constant M, such that ˇye,N(t)≤M and ˜ye,N(t)≤M, for all t>T.
Proof: Letting λ_=λminP=λminˉP, by Theorem 1, one has that there exists a time T1 such that ||˜yˉε(t)||≤4λ_−1μ2ˉε2N+2||ˉP||3,∀t≥T1; on the other hand, by Theorem 2, there exists a time T2 such that ||ηε(t)||≤4λ_−1μ2ε2N+2||P||3,∀t≥T2. Moreover, letting ˇEε be defined in (14), by Assumption 1, one has that ||ˇEε||=||Eˉε||. Hence, letting T=max{T1,T2}, by considering that ||˜yˉε||=||Eˉε˜ye,N|| and that, by the proof of Corollary 1,
||ηε||≥||ˇEεˇye,N||, there exists a sufficiently large time T, and a positive real constant M, such that ||ˇye,N(t)||≤M and ||˜ye,N(t)||≤M, ∀t>T.
Corollary 2: Let the assumptions of Proposition 1 hold. If, additionally, there does not exist a compact time interval I such that ˉp(t,yeN(t))=0, for almost all times t∈I, then
∫I||ˇye,N(τ)||2dτ<M2|I|−δ1
for some δ1>0 and all t≥T.
Proof: If there does not exist a time interval I such that ˉp(t,yeN(t))=0, ∀t∈I, then by the dynamics of system (7), there does not exist a time interval I, such that y0(t)=ξ0(t), for all times t∈I. Therefore, by (7d), there does not exist a time interval I such that ξN+h(t)=0, for all times t∈I. Hence, by considering that ||ηε(t)||=||ˇEεˇye,N||+δ(ζ(t)), where δ(⋅) is a positive definite bounded function, and that there exists no time interval I such that ζ(t)=0, for all times t∈I, then, by the proof of Proposition 1, one has that
∫I||ˇye,N||2(τ)dτ<M2|I|−∫I||δ(τ)||dτ≜M2|I|−δ1
(15)
for all t≥T. This proves the existence of a smaller upper-bound of the expression in the left-hand side of (15) with respect to normal-sized observers, suggesting that the over-sized observer achieves improved performance with respect to the index ∫I||ˇye,N||2(τ)dτ, as also shown in Section Ⅵ.
Remark 1: Note that if ˉp(t,ye,N)=ˉp(ye,N), ˉp is linear with respect to ye,N and it is zero for some compact time interval I≜[τ1,τ2], τ2>τ1≥T, then it vanishes identically for all t≥τ1, since ye,N(t) is an analytic function of t. This would necessarily require that the observer implements an exact copy of the plant (null estimation error injection). In the case of normal-sized observer this implies that ˉp(ye,N(t))≡0, i.e., the plant is a pure chain of N+1 integrators (with no input). On the other hand, since we assumed that the over-sized observer has a state dimension larger than the plant, this contradicts the fact that the observer would implement a copy of the plant, and then such I cannot exist, yielding δ1>0 in (15).
Remark 2: The main advantage in the use of the over-sized observer (7) relies on the fact that, usually, high-gain practical observers yield estimates with larger errors in the higher order derivatives. Therefore, if one estimates time derivatives up to an order that is greater than the dimension of the system, the estimation error is gathered on the higher order derivatives (which are neglected for estimation purposes), thus leading to a smaller error in the estimation of the state of system (2), as confirmed theoretically by Proposition 1 and Corollary 2.
Ⅴ.
THE LINEAR TIME-INVARIANT CASE
In this section, the filtering properties of the normal-sized and of the over-sized high-gain practical observers given in (3) and in (7), respectively, are discussed.
Consider the error dynamics given in (4) and (8). By considering ˉp(t,ye,N(t)) as a time-dependent input function, systems (4) and (8) are linear and time-invariant, whence the transfer matrices, relating the input ˉp(t):=ˉp(t,ye,N(t)) with ˜ye,N and ˇye,N, respectively, can be computed for such systems.
Consider the LTI system
˙x(t)=Ax(t)+Bu(t),x(0)=x0
(16a)
y(t)=Cx(t).
(16b)
The transfer matrix H(s) of system (16) is given by H(s)=C(sI−A)−1B. If the initial state of system (16) is x(0)=0, then, letting u(s)=L[u(t)], the Laplace transform y(s) of the output y(t) of system (16) is given by
y(s)=H(s)u(s).
Therefore, letting ˉp(s)=L[ˉp(t)],
ˆC1=IN, ˆC2=[IN0], and assuming that ˜ye,N(0)=0 and η(0)=0, the Laplace transform of the errors ˜ye,N(t) and ˇye,N(t) can be obtained as
˜ye,N(s)=ˆC1(sI−A1)−1B1ˉp(s)
(17a)
ˇye,N(s)=ˆC2(sI−Θ)−1Λˉp(s)
(17b)
respectively. Given A∈Rn×n, (sI−A)−1 can be computed by using the following Algorithm 1, where tr\, (⋅) and det\, (⋅) denote the trace and determinant operator, respectively.
By using such an algorithm, an explicit expression of the transfer matrices of systems (4) and (8) can be obtained.
Algorithm 1 [32]: Computation of the Matrix (sI−A)−1
Proof: By using Algorithm 1, with A1∈R(N+1)×(N+1) as input, to compute (sI−A1)−1, one has that αN=ˉκ1ˉε−1 and RN=A1+ˉκ1ˉε−1I. Assuming that, for a fixed i,
αN+1−(i−1)=ˉκi−1ˉε−(i−1) and that RN+1−(i−1) equals
then, by Steps 4 and 5 of Algorithm 1,
αN+1−i=ˉκiˉεi and RN+1−i is given by the formula above, with (i−1) substituted by i. Hence, by induction, the matrices RN+1−i,
i=1,…,N, are given by the expression above, with (i−1) substituted by i. Therefore, letting ˉκ0:=1, by (17a) and Step 7 of Algorithm 1 and by considering that det (sI−A1)=sN+1+∑N+1j=1ˉκjˉεjsN+1−j, the ℓth entry [H1(s)]ℓ, ℓ=1,…,N+1, of the transfer matrix H1(s) of system (4) is given by
To prove that [H2(s)]ℓ is given by (19), define the matrix
T=[IN+100−Ih]
which is trivially nonsingular. Consider now the matrix ˆΘ=TΘT−1. By using Algorithm 1, with input ˆΘ∈R(N+h+1)×(N+h+1), to compute (sI−ˆΘ)−1, by the same reasoning of above, one has that the matrix RN+h+1−i, i=1,…,N+h, of Algorithm 1 is given by
Therefore, by (17b) and by Step 7 of Algorithm 1 and by considering that det (sI−ˆΘ) = det (sI−Θ)=sN+h+1+∑N+h+1j=1κjεjsN+h+1−j, and that ˆC2(sI−Θ)−1Λ=ˆC2T−1(sI−ˆΘ)−1TΛ, the ℓth entry [H2(s)]ℓ, ℓ=1,…,N+1, of H2(s) is given by
The transfer functions given in (18) and (19) can be used to wholly characterize the filtering properties of the observers given in (3) and (7).
Remark 3: The "extra" parameters in H2(s) can be tuned to make the amplitude of H2(s) smaller than H1(s), at least in some frequency range, while maintaining the same estimation error convergence (poles of H1(s) and H2(s) within a desired region). Therefore, the amplitude of the steady-state error induced by ˉp(t) is reduced using over-sized observers.
The optimization could be performed either on the ℓth entry of the transfer function H2(s) or on the overall response to ˉp(t), i.e., minimizing the H2/H∞ norm of H2(s) with standard minimization tools (possibly scaled through a shaping function to allow a frequency dependent minimization).
Ⅵ.
SIMULATION AND EXPERIMENTAL RESULTS
We now present two applications in which it is very important to provide the first derivative of the signals as accurate as possible. The first case is a numerical simulation by which we can show the improved performances of the proposed over-sized observer. Consider the second order LTI system
P(s)=kω2ns2+2λωn+ω2n
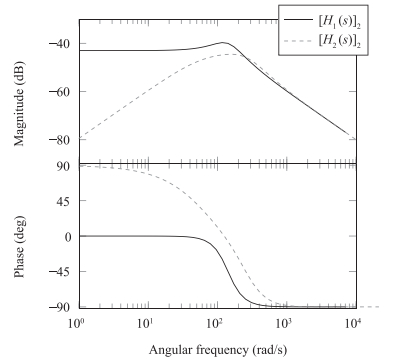
with k=1.8, λ=1.8, and ωn=2π/0.16. The transfer function P(s) has been identified by experimental data in the Frascati Tokamak upgrade (FTU), a fusion reactor, in order to approximate the plasma current Ip(s)≈P(s)u(s) induced by the control input u(t) (voltage to the central solenoid coil coupled with the plasma current, see [33] and [34] for further details). As in general plasma operation, the (normalized) input is picked as u(t)=1−exp(−t) to maintain a constant plasma current Ip. In the real plant the input u(t) is provided by a standard PID regulator that is fed with the tracking error Ip,reference−Ip and its derivative ˙Ip,reference−˙Ip (usually ˙Ip,reference=0). The initial conditions of the plant are selected equal to 0 for simplicity. The high-gain observers given in Sections Ⅲ and Ⅳ have been used to estimate ˙y=˙Ip. In order to compare the two high-gain observers, a numerical constrained minimization has been carried out in order to determine (ˉκ1,ˉκ2)∈[−500,500] and (κ1,κ2,κ3)∈[−500,500] such that, letting N=1, h=1, and ε=ˉε=0.05, the H2 gain of the transfer functions [H1(s)]2 and [H2(s)]2 (given in (18) and (19), respectively), are minimized, while the roots of the polynomials λ2+ˉκ1λ+ˉκ2 and λ3+κ1λ2+κ2λ+κ3 have real part smaller than -2. The results of such minimizations are
[ˉκ1ˉκ2]T=[7.0749.99]T
(20a)
[ˉκ1ˉκ2ˉκ3]T=[21.38221.81499.99]T
(20b)
that correspond to H2 gains 0.0841 and 0.0633, respectively. The Bode diagrams of the two optimized transfer functions of the high-gain observers are reported in Fig. 1: the H2 gain of the over-sized observer is lower than the normal one. In particular, for ω lower than 2×102, one has |H1(ıω)|<|H2(ıω)|.
These numerical computations corroborate the theoretical results given in this paper; in fact, they suggest again that, by allowing an "over-sizing" of the high-gain observer given in [20], improved performances can be achieved.
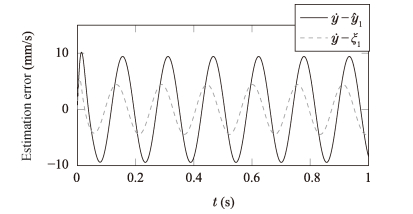
Fig. 2 depicts the results of such a numerical simulation by showing the difference between the analytical time derivative of the output ˙y and its estimates obtained by using the normal-sized (with N=1) and over-sized (with N=1 and h=1) high-gain observers (3) and (7), respectively, where ε=ˉε=0.05 and the ˉκi's and κj's are given in (20).
The performances of the high-gain observer have improved by allowing its "over-sizing". As a matter of fact, one has that the estimation error resulting from the use of the over-sized high-gain practical observer is lower than the error obtained by employing the normal-sized one.
The two observers corresponding to the ˉκi's and κj's given in (20) and ε=ˉε=0.05 have then been compared in a real experiment data. In this second case, we estimate the derivative of the runaway electron beams vertical position for which LTI models do not give satisfactory reconstruction, then we have only shown numerical results (in the previous case an analytic expression for ˙y has been provided to compare the observers).
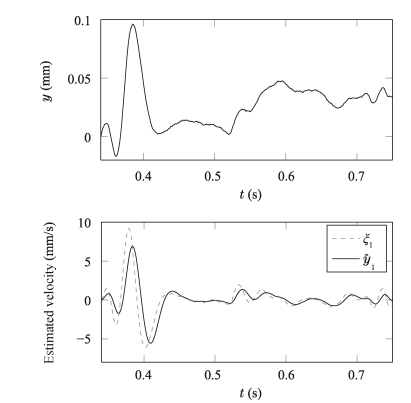
The measured plasma vertical position is first filtered with a first-order low-pass filter with cutoff frequency 100\, \mathit{\boldsymbol{Hz}} and is then fed to the normal-sized (with N=1) and over-sized (with N=1 and h=1) high-gain observers (3) and (7), where \varepsilon=\bar{\varepsilon}=0.05 and the \bar{\kappa}_i's and \kappa_j's are the ones given in (20). Fig. 3 depicts the filtered vertical position and the estimated velocities that have been obtained in such a numerical simulation. The over-sized high-gain observer seems to perform^{1} better in estimating the derivative of the filtered signal y (depicted in the same figure for completeness).
^1 In this case, since the analytical model is not available, only qualitative comparison can be achieved.
Figure
3.
Filtered position and estimated velocities: \hat{y}_1 has been obtained by using a normal-sized high-gain observer, whereas \xi_1 has been obtained by using an over-sized observer.
Note that the estimate of the vertical velocity, used by the feedback system to stabilize the runaway electron beam, is of crucial importance in order to avoid damages to the plant [35].
Ⅶ.
CONCLUSIONS
In this paper, over-sized high-gain practical observers have been studied. It has been shown that, if one estimates the time derivatives of the output up to an order that is greater than the dimension of the system and takes into account just the first N ones, then the estimation error decreases. The filtering properties of normal-sized and of the over-sized observers with respect to the unmodeled dynamics \bar p (t) have been characterized by means of the corresponding transfer functions. Finally, the performances of the over-sized and normal-sized high-gain observers have been compared, analytically on an estimated model of the plasma current for FTU, and numerically for the estimation of the vertical velocity of a runaway electrons beam. It is worth noticing that such an over-sizing leads to an observer with an increased number of states and that the estimation error is fed back to the observer dynamics with (linear) gains that may be greater than the ones of the normal-sized observer. However, since such gains affect just the higher order dynamics of the observer, the undesirable effects of lowering the value of \varepsilon are avoided.
A. Isidori, Nonlinear Control Systems. 3rd ed. London, UK:Springer, 1995.
[6]
L. Liu, Y. J. Liu, and C. L. P. Chen, "Adaptive neural network control for a DC motor system with dead-zone, " Nonlinear Dyn., vol. 72, no. 1-2, pp. 141-147, Apr. 2013. doi: 10.1007/s11071-012-0698-2
[7]
S. B. Ding, Z. S. Wang, J. D. Wang, and H. G. Zhang, "H∞ state estimation for memristive neural networks with time-varying delays: the discrete-time case, " Neural Netw., vol. 84, pp. 47-56, Dec. 2016. http://www.ncbi.nlm.nih.gov/pubmed/27639723/
[8]
S. B. Ding, Z. S. Wang, Z. J. Huang, and H. G. Zhang, "Novel switching jumps dependent exponential synchronization criteria for memristor-based neural networks, " Neural Process. Lett. , vol. 45, no. 1, pp. 15-28, Feb. 2017. doi: 10.1007%2Fs11063-016-9504-3
[9]
S. B. Ding, Z. S. Wang, N. N. Rong, and H. G. Zhang, "Exponential stabilization of memristive neural networks via saturating sampled-data control, " IEEE Trans. Cybern., vol. 47, no. 10, pp. 3027-3039, Oct. 2017. http://www.ncbi.nlm.nih.gov/pubmed/28650833
J. O'Reilly, Observers for Linear Systems. London, UK:Academic Press, 1983.
[12]
A. J. Krener and W. Respondek, "Nonlinear observers with linearizable error dynamics, " SIAM J. Control Optim., vol. 23, no. 2, pp. 197-216, Apr. 1985. http://ci.nii.ac.jp/naid/80002446016
[13]
P. Jouan, "Immersion of nonlinear systems into linear systems modulo output injection, " SIAM J. Control Optim. , vol. 41, no. 6, pp. 1756-1778, Jan. 2003. http://dl.acm.org/citation.cfm?id=636317.636363
[14]
P. Eykhoff, System Identification. New York, USA:Wiley, 1974.
M. Arcak and P. Kokotović, "Nonlinear observers: a circle criterion design and robustness analysis, " Automatica, vol. 37, no. 12, pp. 1923-1930, Dec. 2001. http://dl.acm.org/citation.cfm?id=2236728
F. Esfandiari and H. K. Khalil, "Output feedback stabilization of fully linearizable systems, " Int. J. Control, vol. 56, no. 5, pp. 1007-1037, Nov. 1992. doi: 10.1080/00207179208934355
L. Menini, C. Possieri, and A. Tornambè, "Application of algebraic geometry techniques in permanent-magnet DC motor fault detection and identification, " Eur. J. Control, vol. 25, pp. 39-50, Sep. 2015. http://www.sciencedirect.com/science/article/pii/S0947358015000643
[26]
L. Menini, C. Possieri, and A. Tornambè, "Sinusoidal disturbance rejection in chaotic planar oscillators, " Int. J. Adapt. Control Signal Process., vol. 29, no. 12, pp. 1578-1590, Dec. 2015. doi: 10.1002/acs.2564/pdf
T. Kailath, Linear Systems. Englewood Cliffs, NJ, USA:Prentice-Hall, 1980.
[31]
M. Vidyasagar, Nonlinear Systems Analysis. 2nd ed. Philadelphia, USA:SIAM, 2002.
[32]
H. Kwakernaak and R. Sivan, Linear Optimal Control Systems. New York, USA:Wiley, 1972.
[33]
B. Esposito, L. Boncagni, P. Buratti, D. Carnevale, F. Causa, M. Gospodarczyk, J. Martin-Solis, Z. Popovic, M. Agostini, G. Apruzzese, W. Bin, C. Cianfarani, R. De Angelis, G. Granucci, A. Grosso, G. Maddaluno, D. Marocco, V. Piergotti, A. Pensa, S. Podda, G. Pucella, G. Ramogida, G. Rocchi, M. Riva, A. Sibio, C. Sozzi, B. Tilia, O. Tudisco, M. Valisa, and F. T. U. Team, "Runaway electron generation and control, " Plasma Phys. Controlled Fusion, vol. 59, no. 1, pp. 014044, Jan. 2017. http://www.researchgate.net/publication/310754554_Runaway_electron_generation_and_control
L. Boncagni, D. Carnevale, C. Cianfarani, B. Esposito, G. Granucci, G. Maddaluno, D. Marocco, J. R. Martin-Solis, G. Pucella, C. Sozzi, G. Varano, V. Vitale, and L. Zaccarian, "A first approach to runaway electron control in FTU, " Fusion Eng. Des., vol. 88, no. 6-8, pp. 1109-1112, Oct. 2013. http://www.sciencedirect.com/science/article/pii/S0920379613002858
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Daniele Carnevale, Corrado Possieri and Antonio Tornambè, "On "Over-Sized" High-Gain Practical Observers for Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 691-698, Mar. 2018. doi: 10.1109/JAS.2018.7511075
Figure 1. Bode plots of [H_1(s)]_2 and [H_2(s)]_2.
Figure 2. Results of the numerical simulation.
Figure 3. Filtered position and estimated velocities: \hat{y}_1 has been obtained by using a normal-sized high-gain observer, whereas \xi_1 has been obtained by using an over-sized observer.




 DownLoad:
DownLoad:
 DownLoad:
DownLoad:






 DownLoad:
DownLoad:

