Figure
1.
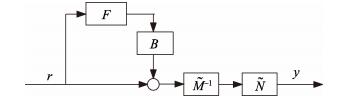
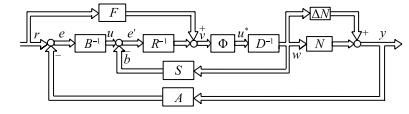
A nonlinear feedback system.
 Volume 5
Issue 2
Volume 5
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | Shuhui Bi, Lei Wang, Shengjun Wen and Mingcong Deng, "Operator-Based Robust Nonlinear Control for SISO and MIMO Nonlinear Systems With PI Hysteresis," IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 523-530, Mar. 2018. doi: 10.1109/JAS.2016.7510175

|
Smart actuators, such as piezoceramic and magnetostrictive actuators, are widely used in experimental investigation and manipulation of chemical, material, physical processes and so on due to their variety of advantages. However, such actuators generally exhibit hysteresis effects in their output responses, which may induce undesirable inaccuracies or oscillations, severely degrades system performance and decreases the system response due to the multi-values, non-smooth and non-memoryless features of the hysteresis. For the treatment of the hysteresis, many efforts have been made in [1]-[7]. Until now, the study on nonlinear systems with nonsmooth nonlinearities by traditional control methods is insufficient, and thus require development of effective approaches [5]-[10]. Therefore, a general control framework of dynamical systems in the presence of hysteresis nonlinearities is still a challenging task [11]-[13].
For dealing with hysteresis, generally the first step is to develop mathematical models that are sufficiently accurate to compensate hysteresis in controller design and are efficient enough to use in real-time applications. For addressing the hysteretic behaviour, many phenomenological models have been proposed to describe the hysteresis nonlinearity, such as Duhen model [2], Preisach model [7], Krasnosel'skii-Pokrovkii hysteresis [3], Prandtl-Ishlinskii (PI) hysteresis operator [2], Bouc-Wen differential model [4], etc. Such models have been widely applied for modeling and compensation of hysteresis effects [5], [11]. Generally, modeling hysteresis nonlinearities is still a research hot spot and the reader may refer to [14] for a recent review. Moreover, the inverse of the hysteresis models, derived using numerical or analytical methods, has been widely suggested for compensating the hysteresis effects. In the above mentioned models, the Prandtl-Ishlinskii model is analytically-invertible, and it can be conveniently implemented as a feedforward compensator for mitigating effects of hysteresis nonlinearities.
Another problem is the control system design, that is, remedying the undesirable behaviors by designing effective control algorithms, such as hysteresis, nonlinearities, uncertainties and so on. To the author's knowledge, operator based robust right coprime factorization approach is effective for controlling above behaviors, because of the fact that it provides a convenient framework in researching input-output stability problems and meets the prerequisites for practical control design [15]-[25], which uses the input-output time function model given by basic physical rules from the real system. In addition, the robustness against significant (constant and time-varying) uncertainties can be guaranteed based on one Bezout identity and an inequality condition [23]. In summary, operator based robust right coprime factorization approach provides a relatively simple and convenient framework for robust control design of nonlinear uncertain systems.
In control practices, with the increasing requirements to deal with the complexities of modern technology, multi-input multi-output (MIMO) systems have more practical and wider applications than single-input single-output (SISO) systems. One important property of MIMO systems is that one single output is affected by multiple inputs, which generates difficulties in designing MIMO control system. In comparison with the results on control system design for SISO systems in the control literatures, there are fewer results available for MIMO nonlinear systems due to the complications and the difficulties in dealing with the coupling effects. By using operator based control methods, the robust control design of MIMO systems has been considered in [20]. Moreover, for the MIMO system preceded by hysteresis, the control problem has been considered in [17]. However, the hysteresis is considered as one part of the uncertainties, which limits the system performance very much. For avoiding the limitation, hysteresis should be controlled alone based on its properties. Through the analysis of the hysteresis model, generalized PI hysteresis given in [6] is confirmed suitable for operator based control system design due to its Lipschitz property and invertibility. Therefore, in this paper, the generalized PI hysteresis will be analyzed, and robust control for SISO and MIMO nonlinear uncertain systems preceded by hysteresis will be considered.
The remainder of the paper is organized as follows. In Section Ⅱ, some relevant notes on operator theory are introduced. In Section Ⅲ, operator based control system design for SISO and MIMO system with feedforward and feedback controller is proposed. A numerical example is done to support the theoretical analysis in Section Ⅳ and conclusion is drawn in Section Ⅴ.
Let X and Y be linear spaces over the field of real numbers, and let Xs and Ys be normed linear subspaces, called the stable subspaces of X and Y, respectively, defined suitably by two normed linear spaces under certain norm Xs={x∈X:‖x‖<∞} and Ys={y∈Y:‖y‖<∞}. Let Q:X→Y be an operator mapping from X to Y, and denote by D(Q) and R(Q), respectively, the domain and range of Q. Generally, an operator is said to be bounded input bounded output (BIBO) stable or simply, stable if Q(Xs)⊆Ys. Otherwise, if Q maps some inputs from Xs to the set Y∖Ys (if not empty), then Q is said to be unstable [21].
Let S(X,Y) be the set of stable operators mapping from X to Y. Then, S(X,Y) contains a subset defined by
| U(X,Y)={M:M∈S(X,Y) M is invertible with M−1∈S(Y,X)}. | (1) |
Elements of U(X,Y) are called unimodular operators. In this paper, the operators used are generalized Lipschitz operators defined on extended linear space [23]. The norm of Q is defined as
| ‖Q‖Lip:=|Q(x0)‖Y+‖Q‖ =‖Q(x0)‖Y+supT∈[0,∞)supx,˜x∈XxT≠˜xT‖[Q(x)]T−[Q(˜x)]T‖Y‖xT−˜xT‖X. | (2) |
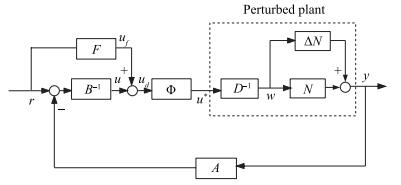
A normal operator based nonlinear feedback control system is shown in Fig. 1, u∈U and y∈V are control input and plant output respectively, U and V are used to denote the input and output spaces of a given plant operator P, i.e., P:U→V. The given plant operator P:U→V is said to have a right factorization, if there exist a linear space W and two stable operators D:W→U and N:W→V such that D is invertible from U to W, and P=ND−1 on U, where, the space W is called a quasi-state space of P. In the right factorization of P, D−1 is unstable for the case of P being unstable. That is, N is the stable part of the plant, and the unstable part is included in D−1 if the plant is unstable. Moreover, the factorization is said to be coprime, or P is said to have a right coprime factorization, if there exist two stable operators A:V→U and B:U→U, satisfying the Bezout identity
| AN+BD=M, for some M∈U(W,U) | (3) |
where B is invertible. Usually, P is unstable and (N,D,A,B) are to be determined.
It is worth to mention that the initial state should also be considered, that is, AN(w0,t0)+BD(w0,t0)=M(w0,t0) should be satisfied. In this paper, we select t0=0 and w0=0.
In [21], the bounded input bounded output stability of the system has been proved under the condition (3). As for nonlinear system with perturbation, the robust control is shown as Fig. 2 [23], where, the nominal plant and plant perturbation are P and ΔP, respectively, and the overall plant ˜P is ˜P=P+ΔP. The right factorization of the nominal plant P and the overall plant ˜P are P=ND−1, P+ΔP=(N+ΔN)D−1, where N,ΔN, and D are stable operators, D is invertible, ΔN is unknown but the upper and lower bounds are known. Then the stability of the nonlinear feedback control system with perturbation can be guaranteed if
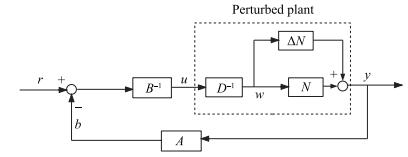
| ‖(A(N+ΔN)−AN)M−1‖<1 | (4) |
where A and B satisfy the Bezout identity (3).
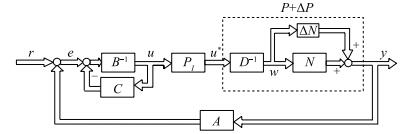
As for the MIMO nonlinear system with uncertain hysteresis, the robust control has been considered in [17], the control system was designed as Fig. 3, where, the hysteresis was considered as one part of uncertainties which were controlled by the regulating operator C. However, the detailed performance has not been considered yet, or if the influence of hysteresis is strong, then the method is not effective. Therefore, more detailed control design should be considered.
For predicting asymmetric input-output hysteresis, one generalized play operator was utilized to formulate a continuous generalized Prandtl-Ishlinskii model and to obtain its inverse model in [11], where, the generalized play operator for any input u(t)∈Cm[0,T] is defined as
| Sγ[u](t)={max(γl(u)(t)−γ,z(ti)),for u(t)>u(ti)min(γr(u)(t)+γ,z(ti)),for u(t)<u(ti)z(ti),for u(t)=u(ti) | (5) |
where Cm[0,T] is the space of the piecewise monotone continuous functions, 0=t0<t1<⋯<tN=T are intervals in [0,T], such that the function u is monotone on each of the subintervals [ti,ti+1], γ refers to the threshold value.
In detail, an increase in input u causes the output of the generalized operator z to increase along the curve γl, while a decrease in input u causes the output z to decrease along the curve γr, resulting in an asymmetric loop, which is shown as Fig. 4, where, the curves γl and γr are strictly increasing and continuous envelope functions with γl−γ≤γr+γ. Unlike the classical play operator, the generalized operator yields zero outputs z(t)=0 at two different values ζ1 and ζ2 of the increasing and decreasing inputs u(t), the difference in the magnitudes of ζ1 and ζ2 allows for describing asymmetric hysteresis loops. The two constants can be obtained by the following relations:
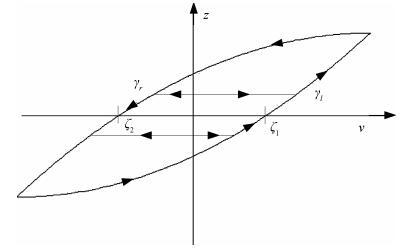
| {γl(ζ1)=γ,for ˙u(t)>0γr(ζ2)=−γ,for ˙u(t)<0. | (6) |
Then, by the generalized play operator Sγ, the generalized Prandtl-Ishlinskii model is given as
| Φ(u)(t)=∫R0pγ(γ)Sγ[u](t)dγ | (7) |
pγ(γ) is the density function to describe the hysteresis nonlinearities. The threshold γ is applied in the Prandtl-Ishlinskii model as 0=r0<r1<⋯<rn=R. and the inverse of generalized Prandtl-Ishlinskii model can be expressed in terms of envelope, density functions and play operator as follows (see [11]):
| Φ−1(v)(t)={γ−1l(ψ′(0)v+∫Q0ψ″(q)F+q[v]dq),for ˙v(t)>0γ−1r(ψ′(0)v+∫Q0ψ″(q)F−q[v]dq),for ˙v(t)<0 | (8) |
where the threshold q is applied in the inverse Prandtl-Ishlinskii model as 0=q0<q1<⋯<qn=Q.
| F+q[v](t)=max(v(t)−q,w(t)) | (9) |
| F−q[v](t)=min(v(t)+q,w(t)) | (10) |
and ψ(q) is the inverse initial loading curve and is defined as
| ψ(q)(t)=gq(0)q+∫q0gq(θ)(q−θ)dθ | (11) |
such that
| ψ=ϕ−1 | (12) |
| ϕ(γ)=pγ(0)γ+∫γ0pγ(θ)(γ−θ)dθ | (13) |
where gq(0) is positive constant and q is the threshold of the inverse model. Consequently, the density function of the Prandtl-Ishlinskii model can be computed as follows:
| ψ″=gq(q) | (14) |
and
| ψ′=gq(0). | (15) |
The threshold q is applied in the inverse Prandtl-Ishlinskii model as 0=q0<q1<⋯<qn=Q. In summary, inverse generalized Prandtl-Ishlinskii model has the key properties that: 1) is hysteresis operator; 2) yields clockwise input-output curves; 3) has Lipschitz continuity; 4) is a monotone operator. That is, it can be applied in operator theoretic settings.
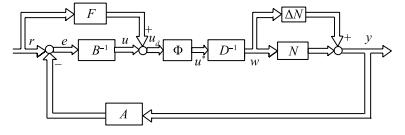
In [19], robust nonlinear control system design for SISO nonlinear system with generalized PI hysteresis was considered, and the control design with a feedforward controller is proposed as Fig. 5, where, Φ is a generalized Prandtl-Ishlinskii hysteresis operator such that u∗(t)=Φ(ud)(t), the real system plant is ˜P and the nominal plant is P, they have right factorization as ˜P=˜ND−1=(N+ΔN)D−1 and P=ND−1, respectively. ΔN is concerning with the unmodeled uncertainties, and its upper and lower bounds are known. A, B and F are operators to be designed, r∈U, ud∈U, w∈W and y∈V are the reference input, control input, quasi-state and system output, respectively.
In [16], the mismatch between the real plant and the nominal plant can be predicted by a prediction structure, which is denoted by ΔP∗ and the desired mismatch operator is equivalent to the plant perturbation ΔP, namely, ΔP∗=ΔP. We assume that ΔP∗ has right factorization as ΔP∗=ΔN∗D−1, and ΔN∗ is bounded. As mentioned in [18], operator N can be divided into two parts, that is, N=Nu+Ns, where Nu is unimodular operator, Ns is stable and is as small as possible. Then, if the uncertainty part is relatively smaller than Nu, namely,
| ‖(Ns+ΔN∗)N−1u‖<1 | (16) |
it follows that ˜N∗=N+ΔN∗ is unimodular operator.
As pointed in last subsection, the generalized PI hysteresis model and its inverse are Lipschitz continuous, then, in operator theoretic settings, we can assume that the controllers A and B are designed satisfying the following conditions that
| ‖(A(N+ΔN∗)−AN+BΦ−1D−BD)M−1‖<1 | (17) |
where M is unimodular operator satisfying the Bezout identity (3). According to [23], condition (17) implies that A(N+ΔN∗)+BΦ−1D=˜M is unimodular operator. Then, if B is linear, the system has that
| r(t)=A(N+ΔN)w(t)+BΦ−1Dw(t)−BFr(t) | (18) |
which implies
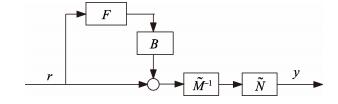
| w(t)=˜M−1(I+BF)r(t) | (19) |
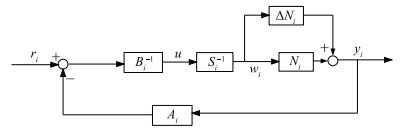
then the system can be rewritten as Fig. 6. According to [23], if F is stable, then the whole system is robustly stable due to the stability property of the operators ˜M and F.
Theorem 1: As for the nonlinear system with hysteresis shown in Fig. 5, if A→I and F=Φ−1(P+ΔP∗)−1, then the output y(t) tracks the reference input r(t).
Proof: Based on (19), the system has that
| y(t)=˜N˜M−1(I+BF)r(t) | (20) |
| =˜N˜M−1(I+BΦ−1(P+ΔP∗)−1)r(t) | (21) |
| =˜N˜M−1(˜N∗+BΦ−1D)(˜N∗)−1r(t). | (22) |
Since ˜N=N+ΔN=N+ΔN∗=˜N∗, and under the condition that A(t)→I, ˜N∗+BΦ−1D→˜M. Then, y(t)→r(t).
Remark: Due to the nonlinearity of system, the condition A→I ensures unknown influence in the feedback process due to A is nonlinear. The theorem also shows that operator control structure can be chosen as a general control structure, which indicates the universality of operator theoretic approach.
In this control design, prediction and modeling errors are inevitable, in order to realize perfect tracking performance, another tracking operator is added in a feedback loop, which is shown in Fig. 7, where Tr is a tracking operator, the part in dotted box is the stabilizing system ˆP.
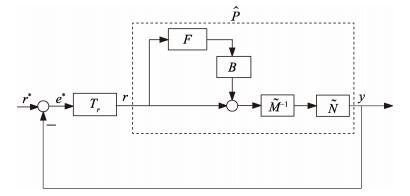
Theorem 2: The error signal e∗ with the controller Tr can be made arbitrarily small. That is, y(t)−r∗(t) can be made arbitrarily small by t≤T large enough, where, controller Tr is designed so that the open loop ˆPTr in Fig. 7 consists of an integrator in cascade with a system PT and satisfies the following conditions:
1) For all t in [0,T], Tr is stable, and PT(e∗)≠K1>0 as T≠t≠t1≠0, e∗>0.
2) PTr(0)=0.
3) ‖PTr(x)−PTr(y),t‖≤h∫t0‖x−y,t1‖dt1, for all x,y in Vs and for all t in [0,T], h is any constant and is the gain of PT in the first norm, where the norm of x restricted to any interval [0,T] will be denoted by ‖x,t‖.
The proof process is similar as in [23], which is omitted here.
In this part, the robust control for MIMO system with generalized PI hysteresis is considered. Based on the control design for SISO system, combining with the coupling effects, the control design for MIMO system is given as Fig. 8, where, the nominal plants and perturbed plants are PP and ΔΔPP. Let input space, output space, quasi-state space be \mathit{\boldsymbol{U}}, \mathit{\boldsymbol{V}}, \mathit{\boldsymbol{W}}, and plants \pmb P:\mathit{\boldsymbol{U}}\to \mathit{\boldsymbol{V}}, and let the input, error, control input, quasi-state and plant output be \pmb{r}=(r_1, r_2, \ldots, r_n)\in \mathit{\boldsymbol{U}}, \pmb{e}=(e_1, e_2, \ldots, e_n)\in \mathit{\boldsymbol{U}}, \pmb{u}=(u_1, u_2, \ldots, u_n)\in \mathit{\boldsymbol{U}}, \pmb{w}=(w_1, w_2, \ldots, w_n)\in \mathit{\boldsymbol{W}} and \pmb{y}=(y_1, y_2, \ldots, y_n)\in \mathit{\boldsymbol{V}}, respectively. \pmb A=(A_1, A_2, \ldots, A_n), \pmb B=(B_1, B_2, \ldots, B_n) are controllers to be designed.
Different from our previous study, for the known coupling effects, we do not use new defined operators to describe them, because the known coupling effects just exist in the model. Then, we assume that the coupling effects exist in the part of \pmb D such that
| \begin{eqnarray} u_i^*=\sum\limits_{j=1}^n D_{ij}(w_i)(w_j)(t), \ i=1, 2, \ldots, n \end{eqnarray} | (23) |
and \pmb {\Delta N}=(N_1, N_2, \ldots, N_n) are unknown but their upper and lower bounds are known. According to the proposed control design for SISO system preceded by hysteresis, if B_i is linear, then the system has that
| \begin{eqnarray} \pmb r(t)=\pmb A(\pmb N+\pmb \Delta N)\pmb w(t)+\pmb B\Phi^{-1}\pmb D \pmb w(t)-\pmb B\pmb F\pmb r(t) \end{eqnarray} | (24) |
because of the coupling effects, the system can not use the results of last subsection directly. Without considering the effects of hysteresis, the robust stability was considered in [20]. Based on the results, we redraw the system control design as Fig. 9.
Lemma 1: If R_i is linear and
| \begin{eqnarray} \sum\limits_{\substack{j=1 \\ j\neq i}}^n \big(S_{ij}(w_i)(w_j)(t)+R_iD_{ij}(w_i)(w_j)(t)\big)=0 \end{eqnarray} | (25) |
| \begin{eqnarray} S_{ii}(w_i)+R_iD_{ii}(w_i)(t)=C_i(w_i)(t) \end{eqnarray} | (26) |
then the plant is decoupled provided that C_i is invertible and stable [19].
Based on the above conditions, the system can be decoupled, and the output tracking conditions can be realized by Theorem 2. Then, in the following, we will consider the robust condition of the MIMO system with hysteresis.
Generally, by operator based system control design, there is a relation between the input and quasi-state, that is, if robust right coprime factorization condition is satisfied, the relation can be written as
| \begin{eqnarray} r_i(t)=\tilde M_i(w_i)(t) \end{eqnarray} | (27) |
which follows
| \begin{eqnarray} u_i(t)=R_i\big(\Phi_i^{-1}\pmb D(w_i)-F_i(r_i)\big)+S_i(w_i)(t). \end{eqnarray} | (28) |
According to the proposed control design of SISO system with hysteresis, the feedforward controller \pmb F can be designed as
| \begin{eqnarray}\label{a4} F_i=\Phi_i^{-1}\pmb D(\tilde N_i^*)^{-1} \end{eqnarray} | (29) |
where \tilde N_i^* is the same as Theorem 1. Then, if
| \begin{eqnarray} \tilde M_i=\tilde N_i^* \end{eqnarray} | (30) |
it follows that the coupling effects in \pmb D and the hysteresis \phi_i can be canceled by F, that is
| \begin{eqnarray} u_i(t)=S_i(w_i)(t). \end{eqnarray} | (31) |
In brief, we can choose \pmb R=\pmb I, then the system can be rewritten as Fig. 10.
Remark: Owing to the the coupling effects and nonlinearities, Fig. 9 cannot be redrawn as Fig. 6.
Then, in the same manner of [16], the controllers are designed as
| A_iN_i(w_i)(t)=N_i(w_i)(t)+G_i(w_i)(t) | (32) |
| A_iN_{ui}+B_iS_i=N_{ui} | (33) |
where N_i=N_{ui}+N_{si}, N_{ui} is unimodular, and N_{si} is stable such that
| \begin{eqnarray} \label{a3} \| (N_{si}+\Delta N_i)N_{ui}^{-1}\|<1 \end{eqnarray} | (34) |
then
| \begin{eqnarray*} r_i(t)&=&A_i(N_i+\Delta N_i)(w_i)(t)+B_iS_i(w_i)(t)\\ &=&[N_i+\Delta N_i+G_i+B_iS_i](w_i)(t)\\ &=&(N_i+\Delta N_i)(w_i)(t)\\ &=&\tilde N_i^*(w_i)(t). \end{eqnarray*} |
That is, (27) is realized. At the same time, the output tracking performance can be realized because of the fact that y_i(t)=\tilde N_i^*(w_i)(t). In summary, the stability can be guaranteed by the following theorem.
Theorem 3: As for the nonlinear system with hysteresis shown in Fig. 9, the system is robustly stable and the output y(t) tracks the reference input r(t) provided that the conditions (29), (32)-(34) are satisfied.
Remark: The proposed operator based control structure can deal with the hysteresis effects by using the model and its inverse even the model is not accurate enough, that is one merit of the usage of operator theoretical based control method. Another merit of this work is that we take uncertainty, coupling effects and hysteresis into consideration synthetically. As for the interval of hysteresis, namely, the bounds of the hysteresis model will be considered in the future work.
In this section, the effectiveness of the proposed design scheme is demonstrated by a mathematical simulation. For simulation, two-input two-output unstable nonlinear plant preceded by hysteresis is considered. The nominal plants are selected as follows:
| \begin{eqnarray} M(y)\ddot {y}+C(y, \dot {y}) \dot {y} = u \end{eqnarray} | (35) |
where
| \begin{eqnarray*} M(y)=\left[ \begin{array}{cc} Z_1+2Z_2\cos y_2&Z_3+Z_2\cos y_2 \\ Z_3+Z_2\cos y_2&Z_3 \end{array} \right]\\ C(y, \dot{y})\dot{y} = \left[ \begin{array}{c} -Z_2\sin y_2(\dot{y}_2^2+2\dot{y}_1\dot{y}_2) \\ Z_2\dot{y}_1^2\sin y_2 \end{array} \right]~~~~~~ \end{eqnarray*} | (36) |
and Z_i is parameter.
We can find that the two-input two-output model is a nonlinear system with coupling effect. In this paper, the right factorizing way is selected as
| \begin{eqnarray} \pmb N(w)(t)&=&\left[ \begin{array}{cc} w_1(t)\\ w_2(t)\end{array}\right]\\\end{eqnarray} | (37) |
| \begin{eqnarray} \pmb D(w)(t)&=&M(w)(t)\ddot {w}(t)+C(w, \dot {w}(t)) \dot {w}(t). \end{eqnarray} | (38) |
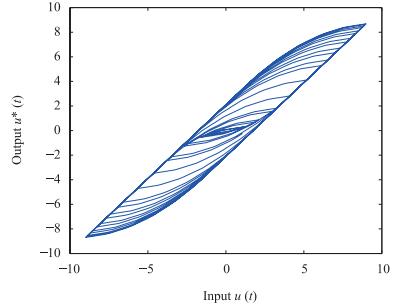
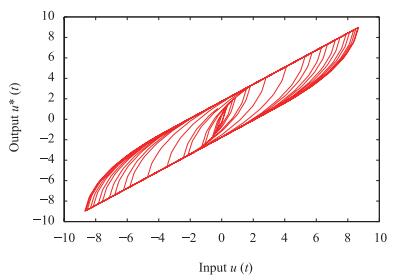
As for the generalized PI model, assume that two hysteresis are same, and the linear envelope functions are chosen to construct the asymmetric hysteresis loops, defined as follows:
| \begin{eqnarray*} &&\gamma_l(v)=v\\ &&\gamma_r(v)= 1.3v + 1.9\\ &&P_{\gamma}(\gamma)= 0.1e^{-0.24\gamma}. \end{eqnarray*} |
Figs. 11 and 12 show the simulation results obtained from the outputs of the generalized PI model and its inverse, respectively. The results show asymmetry in the minor and major loops in the outputs of both the models. Furthermore, the output-input loops in the models exhibit opposite direction.
In the proposed control design, controller {\pmb F} includes the inverse of P+\Delta P, we assume that the predicted mismatch can be described as \Delta N_i(w_i) = \delta_iw_i, where \delta_i=0.5 such that |\delta_i| < 1. In this example, P is invertible, and then we can assume that the prediction error is equivalent to the uncertainty, then according to the proposed design scheme, the hysteresis and the coupling effects are canceled by the constructed feedforward controller \pmb F, and the controller S_i can be selected as a linear operator (1/2)I, and B_i=I, A_i(N_i(w_i))=N_i(w_i)+G_i(w_i), where G_i(w_i)=-B_iS_i(w_i), then it satisfies the proposed condition due to the fact that
| \begin{eqnarray*} A_iN_i(w_i)(t)+B_iS_i(w_i)(t)=(I+\delta_i)(w_i)(t)=\tilde N_i^*(w_i)(t). \end{eqnarray*} |
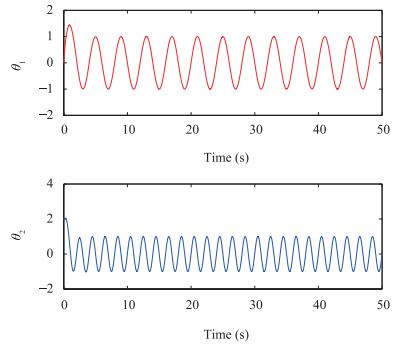
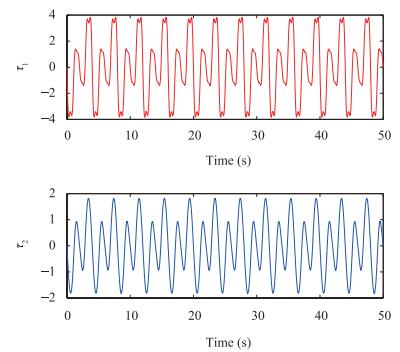
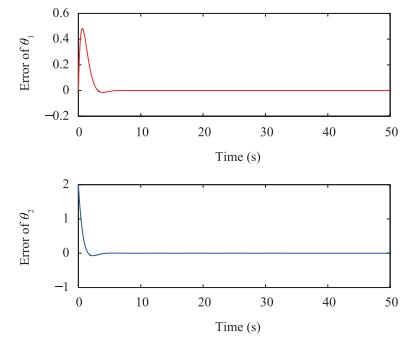
In this example, the structural parameters are selected as Z_1=0.507, Z_2=0.1775, and Z_3=0.2530, respectively. Since there are errors in obtaining the structure parameters Z_i. In simulation, the reference inputs are chosen as \theta_1(t)={\rm sin}(\pi t)/2, \theta_2(t)={\rm sin}(\pi t), then the simulation results are given in Figs. 13-15. Fig. 13 shows the plant output of the system with control. By the proposed control design scheme, the control input is shown in Fig. 14, and tracking error is drawn by Fig. 15. The simulation results demonstrate the perfect tracking performance of the proposed method.
Operator based robust control of SISO and MIMO nonlinear systems with hysteresis is considered in this paper. By using operator based robust right coprime factorization approach, control design combining feedforward and feedback controllers are proposed respectively. Moreover, the sufficient conditions for the system to be robustly stable and guaranteed output tracking performance are proposed. Finally, the effectiveness of the proposed method is confirmed through numerical simulations.
| [1] |
M. Brokate and J. Sprekels, Hysteresis and Phase Transitions. New York: Springer-Verlag, 1996.
|
| [2] |
J. W. Macki, P. Nistri, and P. Zecca, "Mathematical models for hysteresis, " SIAM Rev. , vol. 35, no. 1, pp. 94-123, Mar. 1993.
|
| [3] |
M. A. Krasnoskl'skii and A. V. Pokrovskii, Systems with Hysteresis. Moscow, Russia: Nauka, 1983.
|
| [4] |
M. Rakotondrabe, "Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators, " IEEE Trans. Automat. Sci. Eng. , vol. 8, no. 2, pp. 428-431, Apr. 2011. http://ieeexplore.ieee.org/document/5604686/
|
| [5] |
G. Tao and F. L. Lewis, Adaptive Control of Nonsmooth Dynamic Systems. New York: Springer-Verlag, 2001. doi: 10.1007/978-1-4471-3687-3
|
| [6] |
C. Y. Su, Y. Stepanenko, J. Svoboda, and T. P. Leung, "Robust adaptive control of a class of nonlinear systems with unknown backlash-Like hysteresis, " IEEE Trans. Automat. Control, vol. 45, no. 12, pp. 2427-2432, Dec. 2000. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=895588
|
| [7] |
R. V. Iyer, X. B. Tan, and P. S. Krishnaprasad, "Approximate inversion of the Preisach hysteresis operator with application to control of smart actuators, " IEEE Trans. Automat. Control, vol. 50, no. 6, pp. 798-810, Jun. 2005. http://ieeexplore.ieee.org/document/1440565/
|
| [8] |
B. B. Ren, S. S. Ge, C. Y. Su, and T. H. Lee, "Adaptive neural control for a class of uncertain nonlinear systems in pure-feedback form with hysteresis input, " IEEE Trans. Syst. Man Cybern. B Cybern. , vol. 39, no. 2, pp. 431-443, Apr. 2009. http://www.ncbi.nlm.nih.gov/pubmed/19095551
|
| [9] |
Y. J. Liu, S. C. Tong, C. L. P. Chen, and D. J. Li, "Neural controller design-based adaptive control for nonlinear MIMO systems with unknown hysteresis inputs, " IEEE Trans. Cybern. , vol. 46, no. 1, pp. 9-19, Jan. 2016. http://www.ncbi.nlm.nih.gov/pubmed/25898325
|
| [10] |
Y. J. Liu and S. C. Tong, "Adaptive fuzzy control for a class of unknown nonlinear dynamical systems, " Fuzzy Sets Syst. , vol. 263, pp. 49-70, Mar. 2015. http://dl.acm.org/citation.cfm?id=2741194
|
| [11] |
M. Al Janaideh, S. Rakheja, and C. Y. Su, "An analytical generalized prandtl-ishlinskii model inversion for hysteresis compensation in micropositioning control, " IEEE/ASME Trans. Mech. , vol. 16, no. 4, pp. 734-744, Aug. 2011. http://ieeexplore.ieee.org/document/5510155/
|
| [12] |
X. K. Chen and T. Ozaki, "Adaptive control for plants in the presence of actuator and sensor uncertain hysteresis, " IEEE Trans. Automat. Control, vol. 56, no. 1, pp. 171-177, Jan. 2011. http://ieeexplore.ieee.org/document/5594993/
|
| [13] |
J. Zhou, C. Y. Wen, and T. S. Li, "Adaptive output feedback control of uncertain nonlinear systems with hysteresis nonlinearity, " IEEE Trans. Automat. Control, vol. 57, no. 10, pp. 2627-2633, Oct. 2012. http://ieeexplore.ieee.org/document/6166451/
|
| [14] |
L. Chua and S. Bass, "A generalized hysteresis model, " IEEE Trans. Circuit. Theory vol. 19, no. 1, pp. 36-48, Jan. 1972. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=1083416
|
| [15] |
A. Bańos, "Stabilization of nonlinear systems based on a generalized Bezout identity, " Automatica, vol. 32, no. 4, pp. 591-595, Apr. 1996. http://dl.acm.org/citation.cfm?id=236161
|
| [16] |
S. H. Bi and M. C. Deng, "Operator-based robust control design for nonlinear plants with perturbation, " Int. J. Control, vol. 84, no. 4, pp. 815-821, Apr. 2011. doi: 10.1080/00207179.2011.582155?journalCode=tcon20
|
| [17] |
S. H. Bi, M. C. Deng, L. Wang, and Y. G. Zhao, "Operator-based robust control for MIMO non-linear systems with uncertain hysteresis, " Int. J. Adv. Mech. Syst. , vol. 4, no. 5-6, pp. 212-220, Jan. 2012. http://www.ingentaconnect.com/content/ind/ijamechs/2012/00000004/F0020005/art00002
|
| [18] |
S. Bi, M. Deng, and S. Wen, "Operator-based output tracking control for non-linear uncertain systems with unknown time-varying delays, " IET Control Theory Appl. , vol. 5, no. 5, pp. 693-699, Mar. 2011. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=5759117
|
| [19] |
S. H. Bi, X. L. Wang, J. H. Zheng, and L. Wang, "Operator-based robust nonlinear control for system with generalized PI hysteresis, " in Proc. 2014 Int. Conf. Advanced Mechatronic Systems, Kumamoto, Japan, 2014, pp. 19-42. http://ieeexplore.ieee.org/document/6911620/
|
| [20] |
S. H. Bi, Y. F. Xiao, X. J. Fan, and M. C. Deng, "Operator-based robust decoupling control for MIMO nonlinear systems, " in Proc. 11th World Congr. Intelligent Control and Automation, Shenyang, China, 2014, pp. 2602-2606. http://ieeexplore.ieee.org/document/7053135/
|
| [21] |
G. R. Chen and Z. Z. Han, "Robust right coprime factorization and robust stabilization of nonlinear feedback control systems, " IEEE Trans. Automat. Control, vol. 43, no. 10, pp. 1505-1509, Oct. 1998. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=720519
|
| [22] |
M. C. Deng, A. Inoue, and Y. Baba, "Operator-based non-linear vibration control system design of a flexible arm with Piezoelectric actuator, " Int. J. Adv. Mech. Syst. , vol. 1, no. 1, pp. 71-76, Jan. 2008. http://www.mendeley.com/research/operator-based-non-linear-vibration-control-system-design-flexible-arm-piezoelectric-actuator/
|
| [23] |
M. C. Deng, A. Inoue, and K. Ishikawa, "Operator-based nonlinear feedback control design using robust right coprime factorization, " IEEE Trans. Automat. Control, vol. 51, no. 4, pp. 645-648, Apr. 2006. http://ieeexplore.ieee.org/document/1618840/
|
| [24] |
S. H. Bi, M. C. Deng, and Y. F. Xiao, "Robust stability and tracking for operator-based nonlinear uncertain systems, " IEEE Trans. Automat. Sci. Eng. , vol. 12, no. 3, pp. 1059-1066, Jul. 2015. http://ieeexplore.ieee.org/document/6832636/
|
| [25] |
S. H. Bi, L. Wang, Y. G. Zhao, and M. C. Deng, "Operator-based robust control for nonlinear uncertain systems with unknown backlash-like hysteresis, " Int. J. Control Automat. Syst. , vol. 14, no. 2, pp. 469-477, Apr. 2016. doi: 10.1007/s12555-014-0449-x
|
| [1] | Hongxing Xiong, Guangdeng Chen, Hongru Ren, Hongyi Li. Broad-Learning-System-Based Model-Free Adaptive Predictive Control for Nonlinear MASs Under DoS Attacks[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 381-393. doi: 10.1109/JAS.2024.124929 |
| [2] | Shouyan Chen, Weitian He, Zhijia Zhao, Yun Feng, Zhijie Liu, Keum-Shik Hong. Adaptive Control of a Flexible Manipulator With Unknown Hysteresis and Intermittent Actuator Faults[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 148-158. doi: 10.1109/JAS.2024.124653 |
| [3] | Qinglai Wei, Shanshan Jiao, Qi Dong, Fei-Yue Wang. Event-Triggered Robust Parallel Optimal Consensus Control for Multiagent Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 40-53. doi: 10.1109/JAS.2024.124773 |
| [4] | Yuanhong Xu, Mingcong Deng. Nonlinear Control for Unstable Networked Plants in the Presence of Actuator and Sensor Limitations Using Robust Right Coprime Factorization[J]. IEEE/CAA Journal of Automatica Sinica, 2025, 12(3): 516-527. doi: 10.1109/JAS.2024.124854 |
| [5] | Yunfeng Hu, Chong Zhang, Bo Wang, Jing Zhao, Xun Gong, Jinwu Gao, Hong Chen. Noise-Tolerant ZNN-Based Data-Driven Iterative Learning Control for Discrete Nonaffine Nonlinear MIMO Repetitive Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 344-361. doi: 10.1109/JAS.2023.123603 |
| [6] | Qinchen Yang, Fukai Zhang, Cong Wang. Deterministic Learning-Based Neural PID Control for Nonlinear Robotic Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1227-1238. doi: 10.1109/JAS.2024.124224 |
| [7] | Yalin Zhang, Zhongxin Liu, Zengqiang Chen. A PI+R Control Scheme Based on Multi-Agent Systems for Economic Dispatch in Isolated BESSs[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(10): 2154-2165. doi: 10.1109/JAS.2024.124236 |
| [8] | Zheng Chen, Shizhao Zhou, Chong Shen, Litong Lyu, Junhui Zhang, Bin Yao. Observer-Based Adaptive Robust Precision Motion Control of a Multi-Joint Hydraulic Manipulator[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(5): 1213-1226. doi: 10.1109/JAS.2024.124209 |
| [9] | Wei Qian, Yanmin Wu, Bo Shen. Novel Adaptive Memory Event-Triggered-Based Fuzzy Robust Control for Nonlinear Networked Systems via the Differential Evolution Algorithm[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(8): 1836-1848. doi: 10.1109/JAS.2024.124419 |
| [10] | Zewei Zheng, Jiazhe Li, Zhiyuan Guan, Zongyu Zuo. Constrained Moving Path Following Control for UAV With Robust Control Barrier Function[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10(7): 1557-1570. doi: 10.1109/JAS.2023.123573 |
| [11] | Guang Jin, Mingcong Deng. Operator-Based Robust Nonlinear Free Vibration Control of a Flexible Plate With Unknown Input Nonlinearity[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 442-450. doi: 10.1109/JAS.2020.1003042 |
| [12] | Ni Bu, Wei Chen, Longguo Jin, Yandong Zhao. Robust Control for Uncertain Nonlinear Feedback Systems Using Operator-based Right Coprime Factorization[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(3): 824-829. doi: 10.1109/JAS.2017.7510895 |
| [13] | Xiaoying Wang, Haifeng Hu, Jianquan Gu. Pose Robust Low-resolution Face Recognition via Coupled Kernel-based Enhanced Discriminant Analysis[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2): 203-212. |
| [14] | Longsheng Chen, Qi Wang. Adaptive Robust Control for a Class of Uncertain MIMO Non-affine Nonlinear Systems[J]. IEEE/CAA Journal of Automatica Sinica, 2016, 3(1): 105-112. |
| [15] | Li Liu, Aolei Yang, Wenju Zhou, Xiaofeng Zhang, Minrui Fei, Xiaowei Tu. Robust Dataset Classification Approach Based on Neighbor Searching and Kernel Fuzzy C-Means[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(3): 235-247. |
| [16] | Cheng Peng, Yue Bai, Xun Gong, Qingjia Gao, Changjun Zhao, Yantao Tian. Modeling and Robust Backstepping Sliding Mode Control with Adaptive RBFNN for a Novel Coaxial Eight-rotor UAV[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 56-64. |
| [17] | Zhou Fang, Hua Tian, Ping Li. Probabilistic Robust Linear Parameter-varying Control of a Small Helicopter Using Iterative Scenario Approach[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 85-93. |
| [18] | Zhenhua Deng, Xiaohong Nian. Robust Control of Permanent Magnet Synchronous Motors[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2): 143-150. |
| [19] | Yanlong Zhou, Mou Chen, Changsheng Jiang. Robust Tracking Control of Uncertain MIMO Nonlinear Systems with Application to UAVs[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1): 25-32. |
| [20] | Mark J. Balas, Susan A. Frost. Robust Adaptive Model Tracking for Distributed Parameter Control of Linear Infinite-dimensional Systems in Hilbert Space[J]. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3): 294-301. |

Figures(15)




Shuhui Bi, Lei Wang, Shengjun Wen and Mingcong Deng, "Operator-Based Robust Nonlinear Control for SISO and MIMO Nonlinear Systems With PI Hysteresis," IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 523-530, Mar. 2018. doi: 10.1109/JAS.2016.7510175
 DownLoad:
DownLoad:

 DownLoad:
DownLoad: