2025, 12(1): 27-39.
doi: 10.1109/JAS.2024.124326
Abstract:
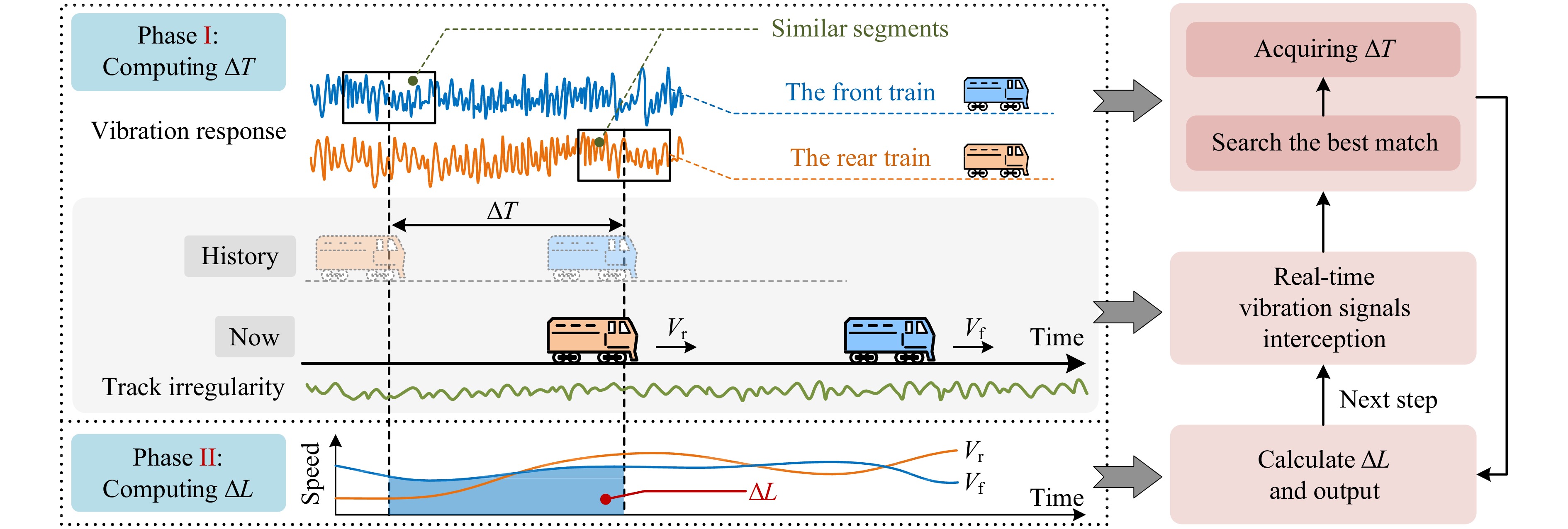
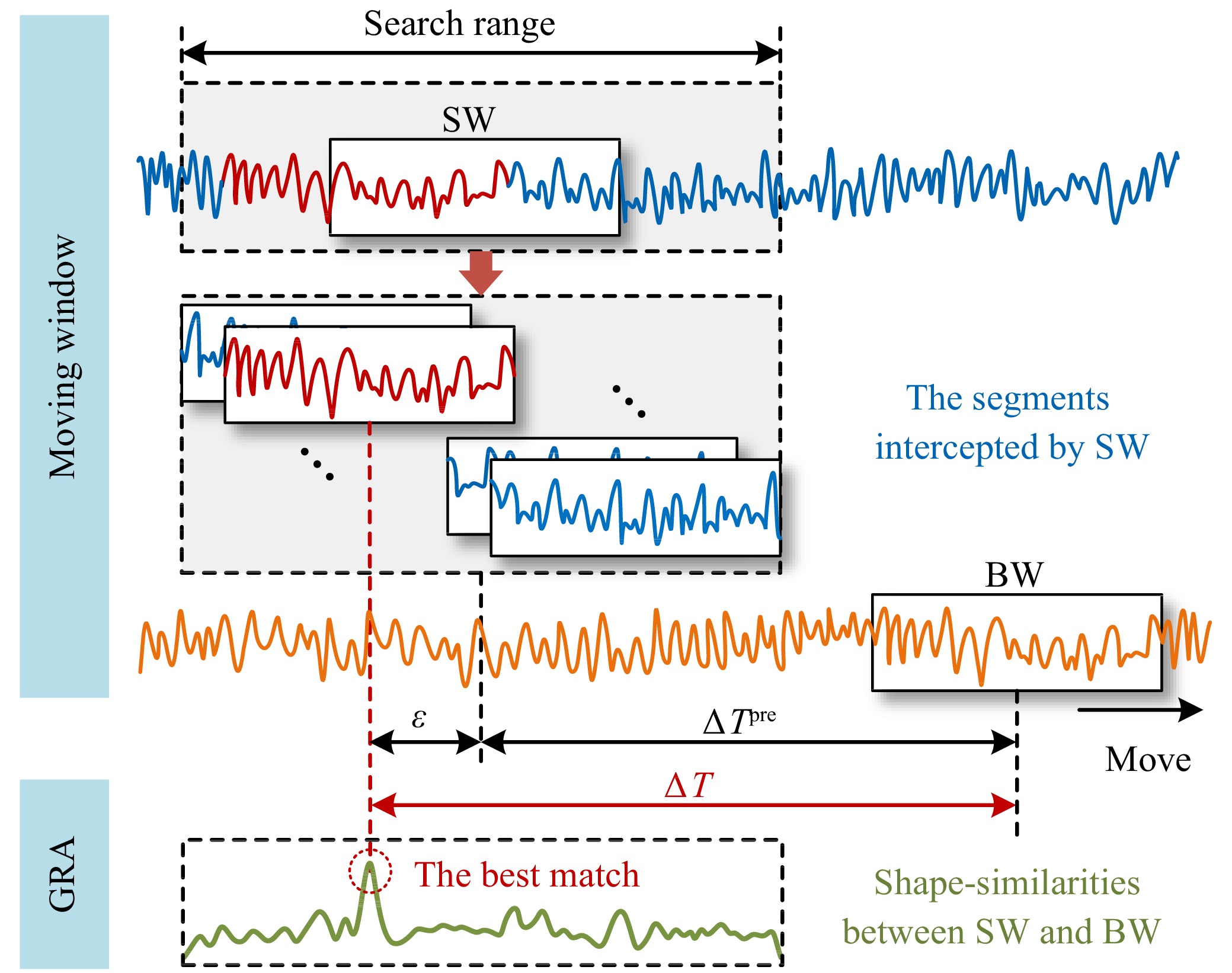
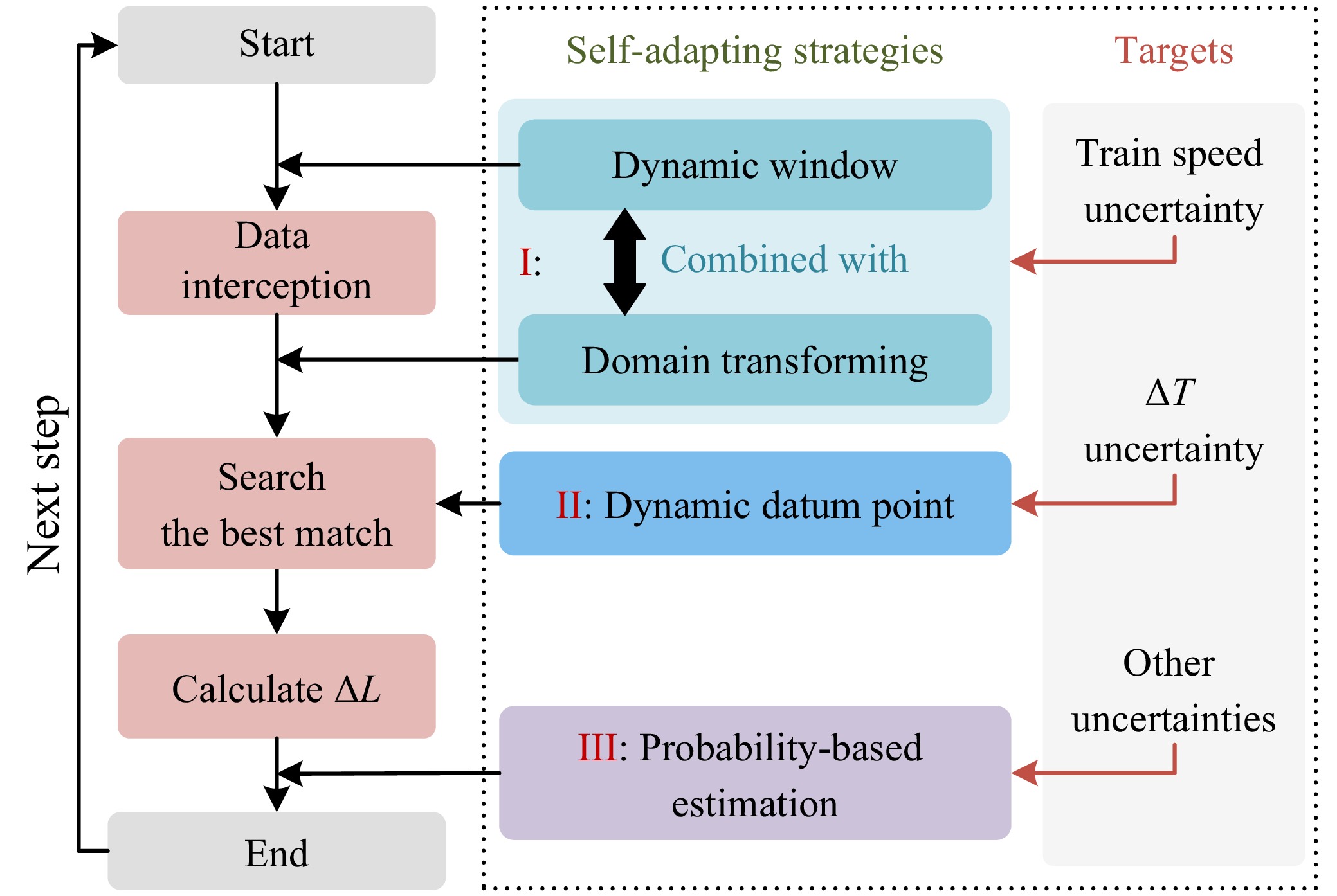
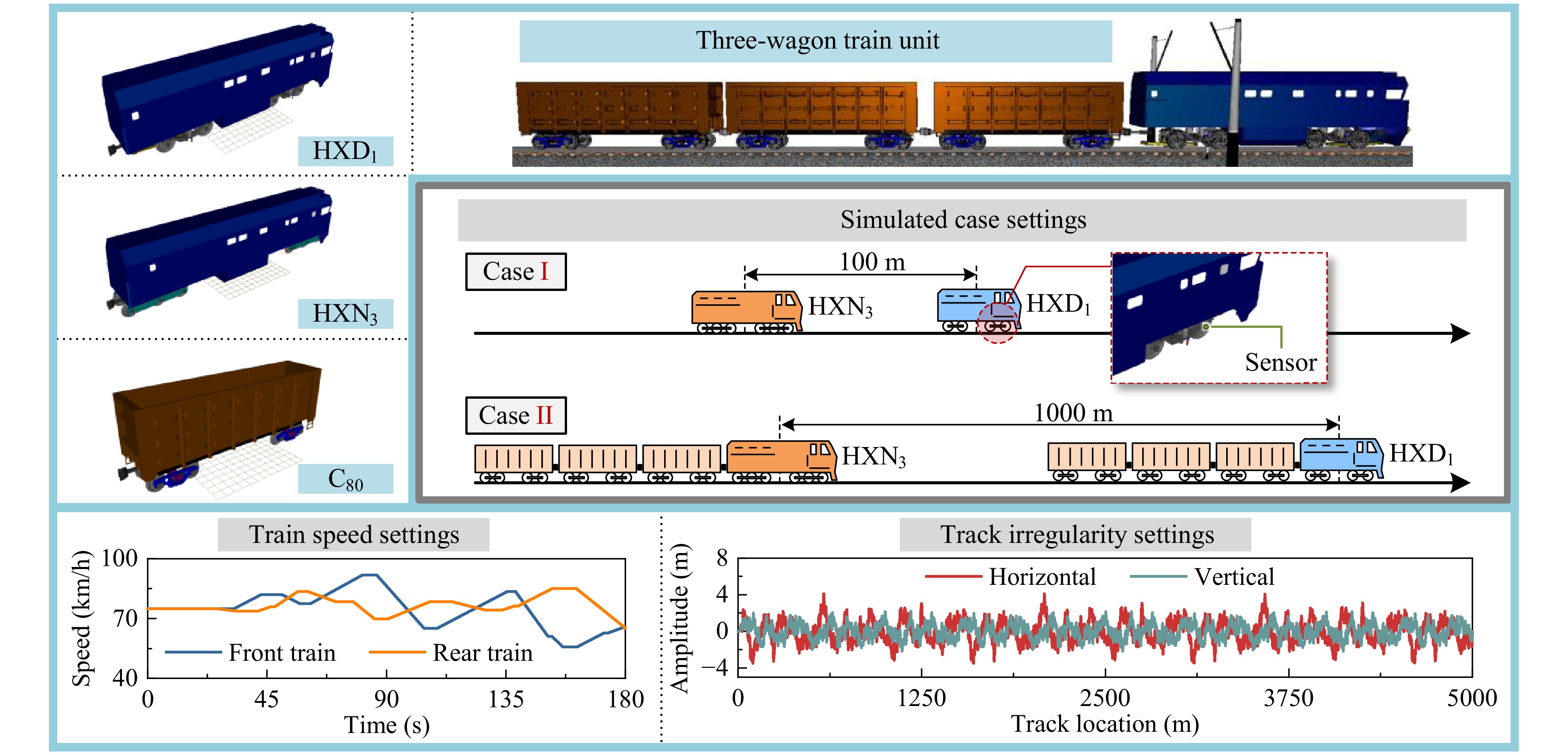
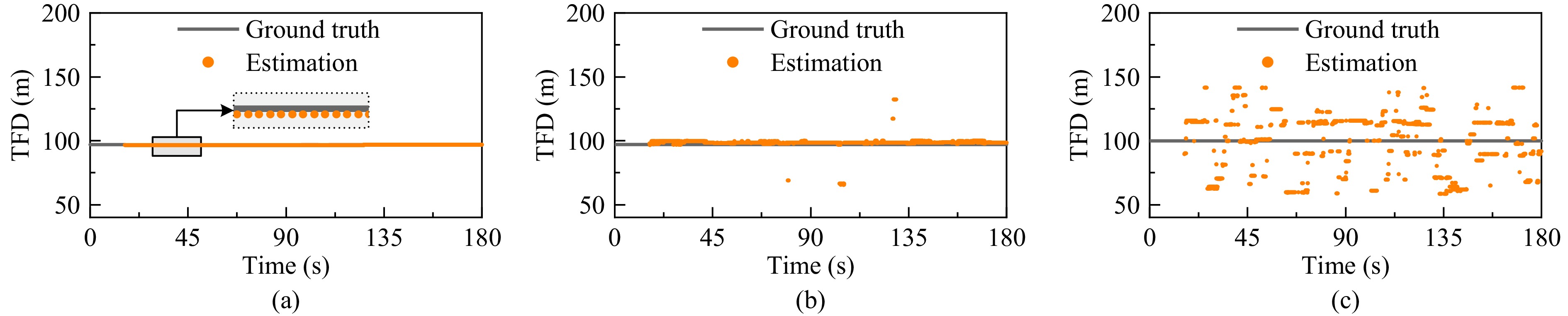
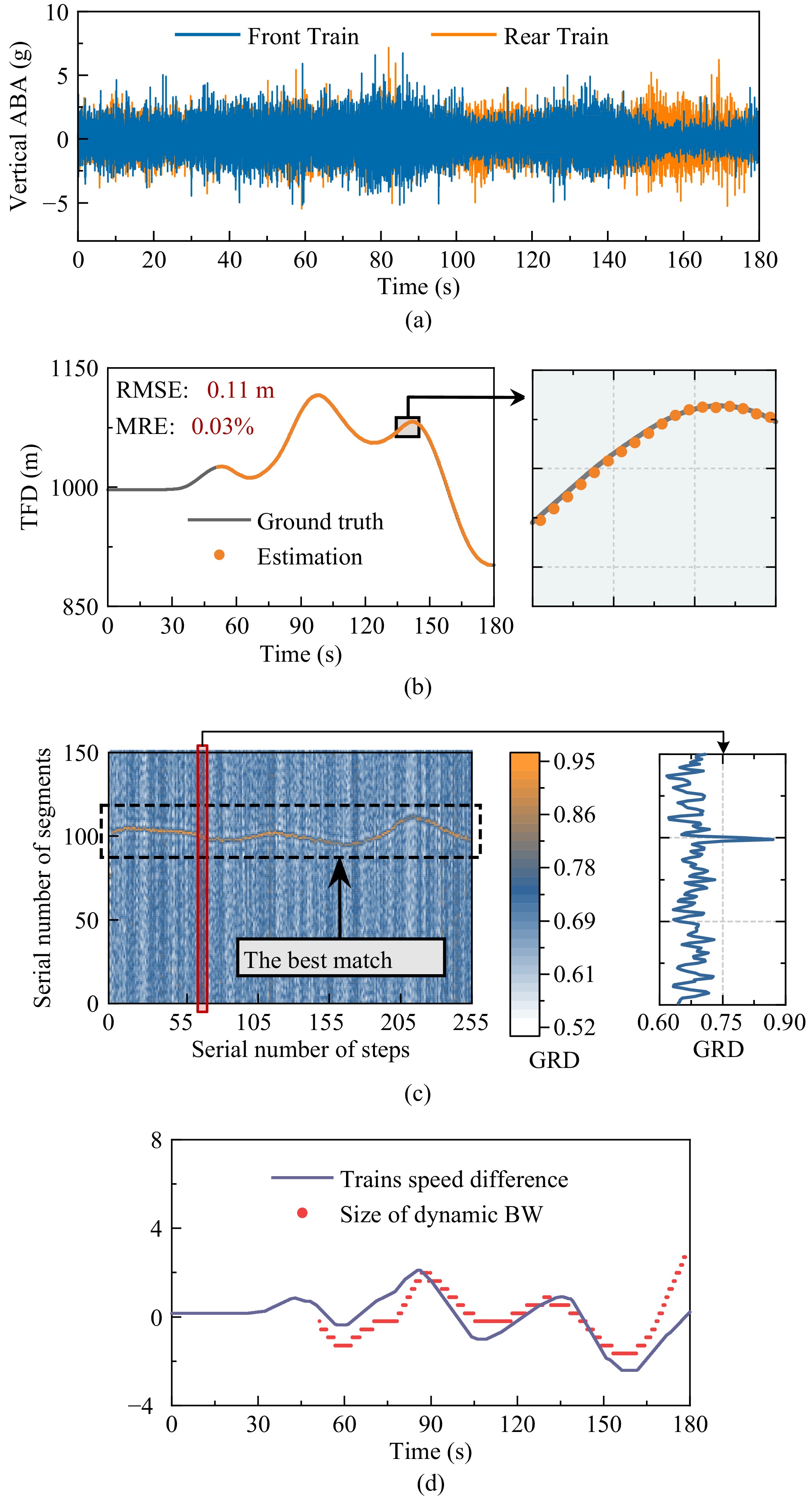
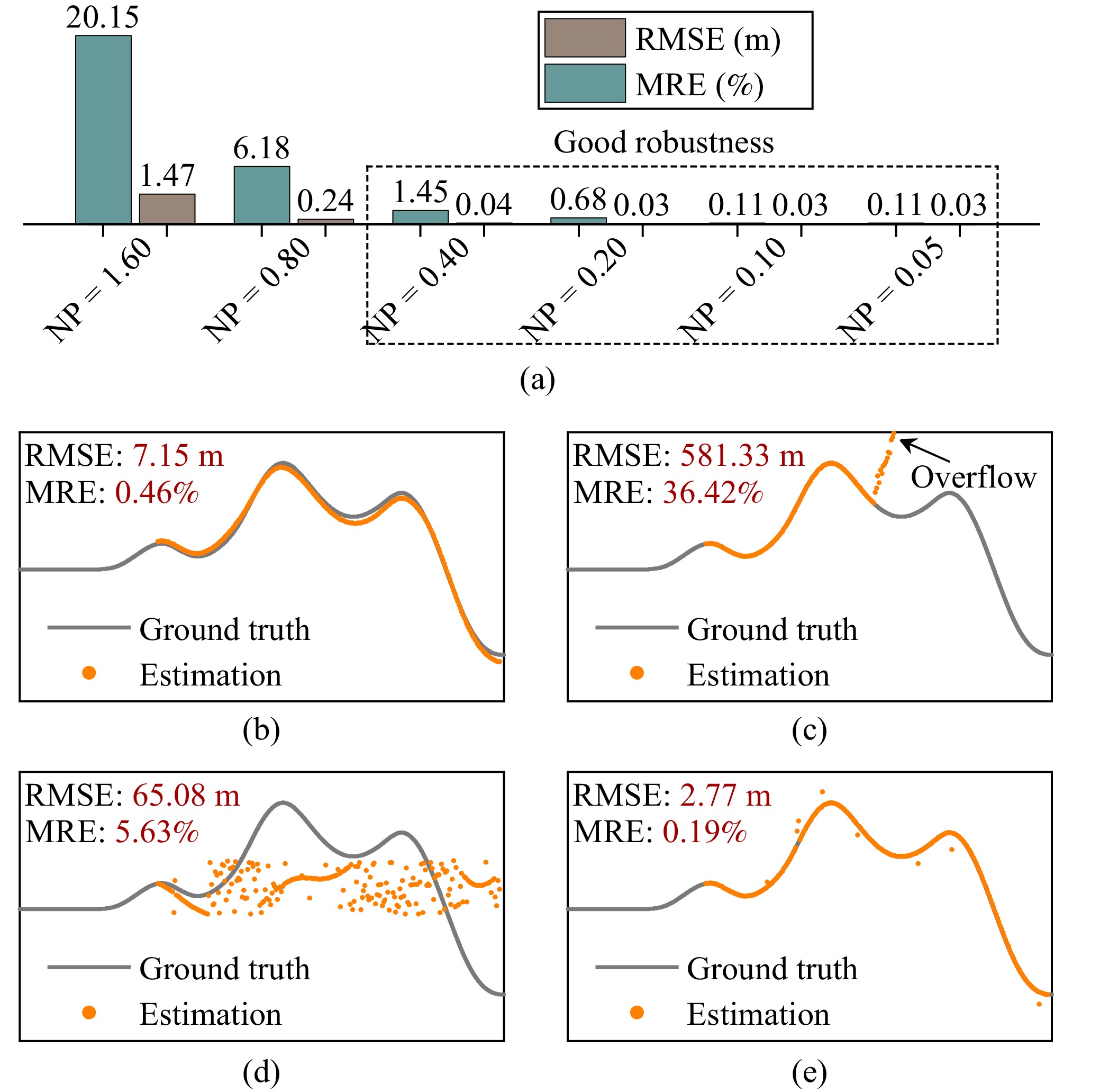
Virtual coupling (VC) is an emerging technology for addressing the shortage of rail transportation capacity. As a crucial enabling technology, the VC-specific acquisition of train information, especially train following distance (TFD), is underdeveloped. In this paper, a novel method is proposed to acquire real-time TFD by analyzing the vibration response of the front and following trains, during which only onboard accelerometers and speedometers are required. In contrast to the traditional arts of train positioning, this method targets a relative position between two adjacent trains in VC operation, rather than the global positions of the trains. For this purpose, an adaptive system containing three strategies is designed to cope with possible adverse factors in train operation. A vehicle dynamics simulation of a heavy-haul railway is implemented for the evaluation of feasibility and performance. Furthermore, a validation is conducted using a set of data measured from in-service Chinese high-speed trains. The results indicate the method achieves satisfactory estimation accuracy using both simulated and actual data. It has favorable adaptability to various uncertainties possibly encountered in train operation. Additionally, the method is preliminarily proven to adapt to different locomotive types and even different rail transportation modes. In general, such a method with good performance, low-cost, and easy implementation is promising to apply.
Q. Zhang, J. Gao, Q. Wu, Q. He, L. Tie, W. Zhai, and S. Zhu, “A novel vibration-based self-adapting method to acquire real-time following distance for virtually coupled trains,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 1, pp. 27–39, Jan. 2025. doi: 10.1109/JAS.2024.124326.




























 E-mail Alert
E-mail Alert


