2023, 10(3): 632-645.
doi: 10.1109/JAS.2023.123084
Abstract:
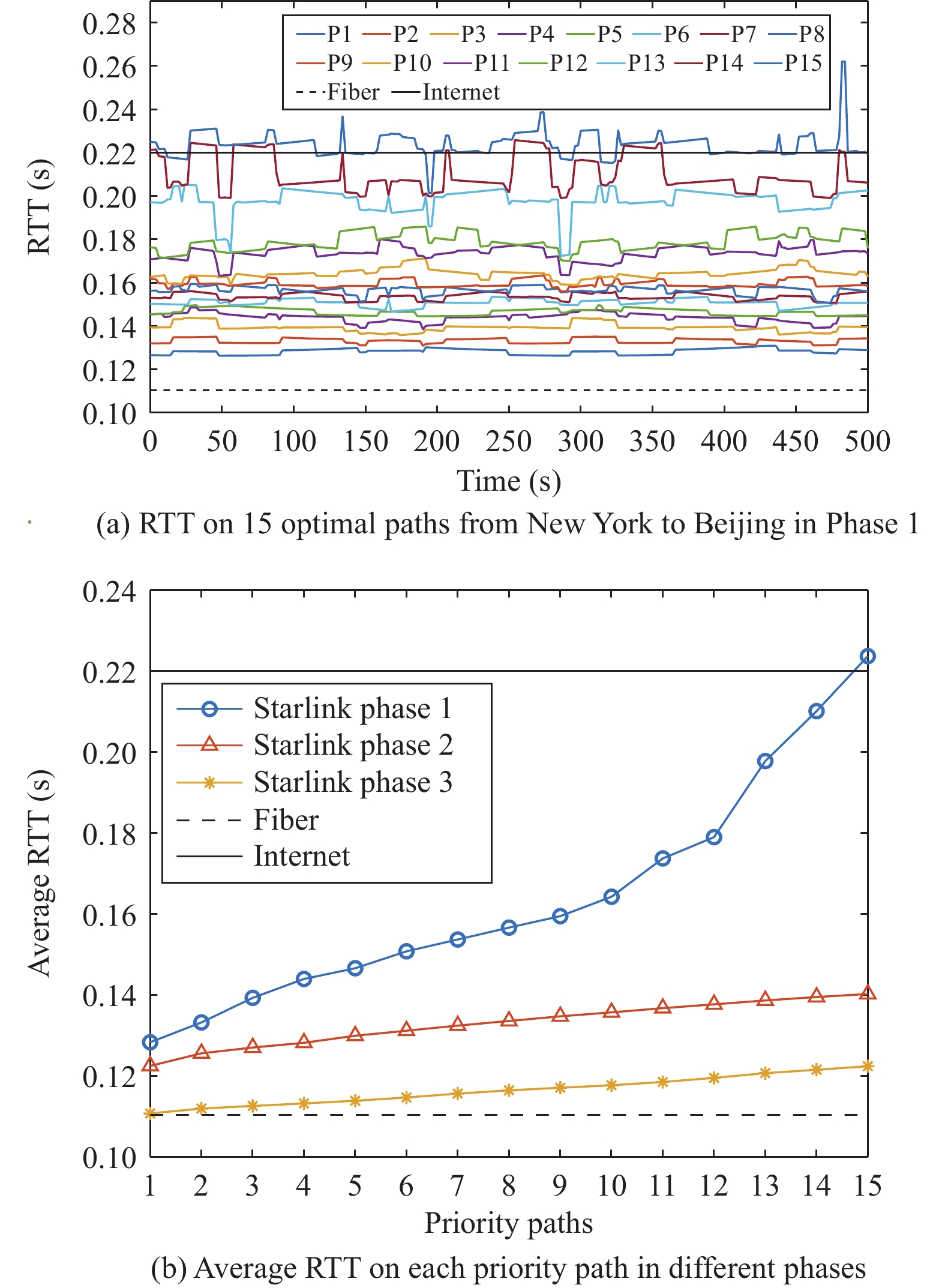
The mega-constellation network has gained significant attention recently due to its great potential in providing ubiquitous and high-capacity connectivity in sixth-generation (6G) wireless communication systems. However, the high dynamics of network topology and large scale of mega-constellation pose new challenges to the constellation simulation and performance evaluation. In this paper, we introduce UltraStar, a lightweight network simulator, which aims to facilitate the complicated simulation for the emerging mega-constellation of unprecedented scale. Particularly, a systematic and extensible architecture is proposed, where the joint requirement for network simulation, quantitative evaluation, data statistics and visualization is fully considered. For characterizing the network, we make lightweight abstractions of physical entities and models, which contain basic representatives of networking nodes, structures and protocol stacks. Then, to consider the high dynamics of Walker constellations, we give a two-stage topology maintenance method for constellation initialization and orbit prediction. Further, based on the discrete event simulation (DES) theory, a new set of discrete events is specifically designed for basic network processes, so as to maintain network state changes over time. Finally, taking the first-generation Starlink of 11 927 low earth orbit (LEO) satellites as an example, we use UltraStar to fully evaluate its network performance for different deployment stages, such as characteristics of constellation topology, performance of end-to-end service and effects of network-wide traffic interaction. The simulation results not only demonstrate its superior performance, but also verify the effectiveness of UltraStar.
X. Y. Liu, T. Ma, Z. X. Tang, X. H. Qin, H. B. Zhou, and X. M. Shen, “UltraStar: A lightweight simulator of ultra-dense LEO satellite constellation networking for 6G,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 632–645, Mar. 2023. doi: 10.1109/JAS.2023.123084.



















































































































































































 E-mail Alert
E-mail Alert