2017, 4(3): 466-482.
doi: 10.1109/JAS.2017.7510547
Abstract:
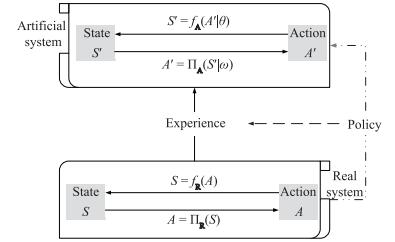
The inherent nature of energy, i.e., physicality, sociality and informatization, implies the inevitable and intensive interaction between energy systems and social systems. From this perspective, we define "social energy" as a complex sociotechnical system of energy systems, social systems and the derived artificial virtual systems which characterize the intense intersystem and intra-system interactions. The recent advancement in intelligent technology, including artificial intelligence and machine learning technologies, sensing and communication in Internet of Things technologies, and massive high performance computing and extreme-scale data analytics technologies, enables the possibility of substantial advancement in socio-technical system optimization, scheduling, control and management. In this paper, we provide a discussion on the nature of energy, and then propose the concept and intention of social energy systems for electrical power. A general methodology of establishing and investigating social energy is proposed, which is based on the ACP approach, i.e., "artificial systems" (A), "computational experiments" (C) and "parallel execution" (P), and parallel system methodology. A case study on the University of Denver (DU) campus grid is provided and studied to demonstrate the social energy concept. In the concluding remarks, we discuss the technical pathway, in both social and nature sciences, to social energy, and our vision on its future.
Jun Jason Zhang, David Wenzhong Gao, Yingchen Zhang, Xiao Wang, Xiangyang Zhao, Dongliang Duan, Xiaoxiao Dai, Jun Hao and Fei-Yue Wang, "Social Energy: Mining Energy From the Society," IEEE/CAA J. Autom. Sinica, vol. 4, no. 3, pp. 466-482, July 2017. doi: 10.1109/JAS.2017.7510547.










































































































































































 E-mail Alert
E-mail Alert