A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 13
Issue 3
Volume 13
Issue 3
IEEE/CAA Journal of Automatica Sinica
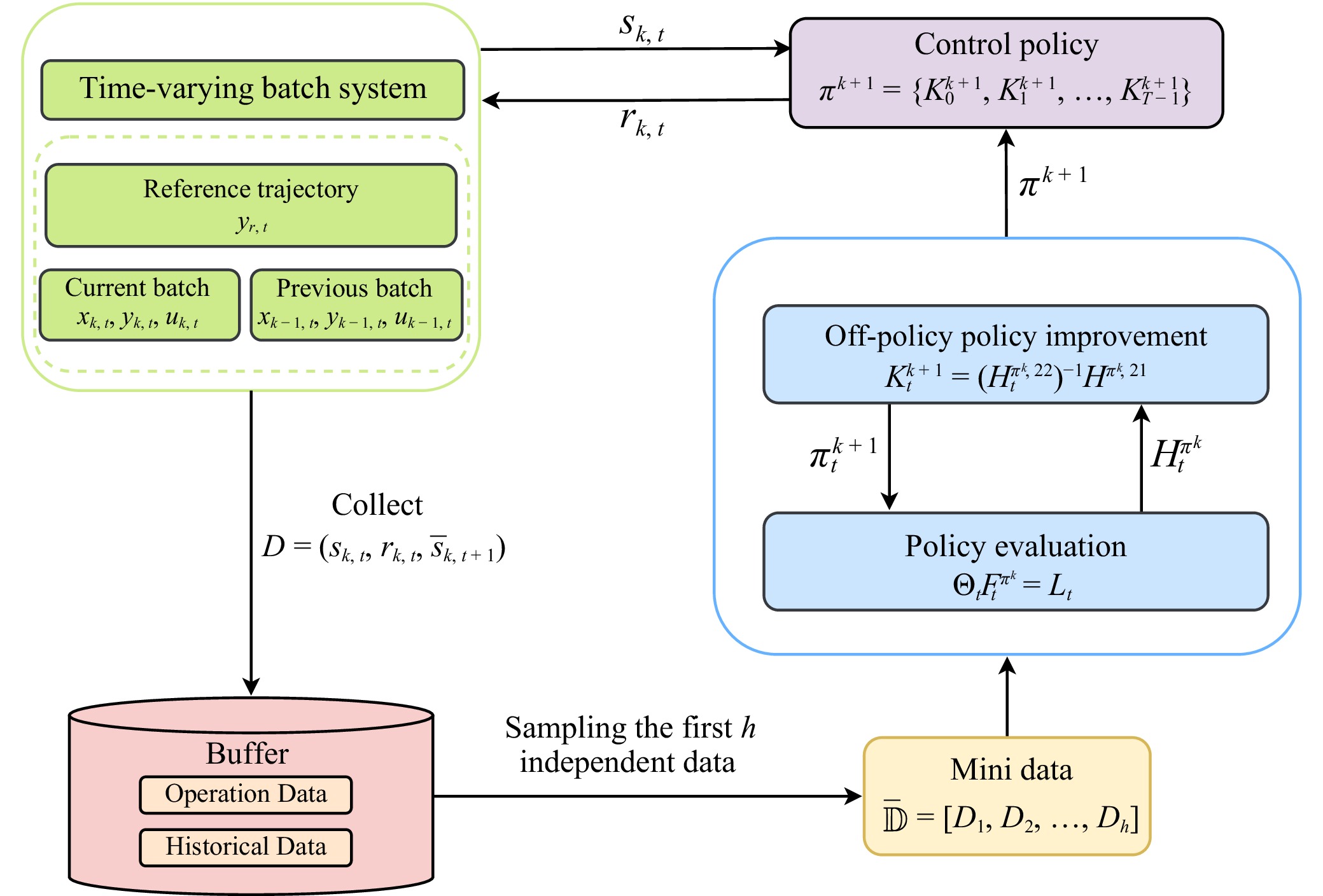
| Citation: | J. Liu, Z. Zhou, J. Huang, W. Hong, and J. Shi, “Two-dimensional model-free off-policy optimal iterative learning control for time-varying batch systems,” IEEE/CAA J. Autom. Sinica, vol. 13, no. 3, pp. 692–703, Mar. 2026. doi: 10.1109/JAS.2025.125399

|

| [1] |
S. Arimoto, S. Kawamura, and F. Miyazaki, “Bettering operation of robots by learning,” J. Robot. Syst., vol. 1, no. 2, pp. 123–140, 1984. doi: 10.1002/rob.4620010203
|
| [2] |
Y. Chen and C. T. Freeman, “Iterative learning control for piecewise arc path tracking with validation on a gantry robot manufacturing platform,” ISA Trans., vol. 139, pp. 650–659, 2023. doi: 10.1016/j.isatra.2023.03.046
|
| [3] |
M. Pierallini, F. Angelini, R. Mengacci, A. Palleschi, A. Bicchi, and M. Garabini, “Iterative learning control for compliant underactuated arms,” IEEE Trans. Syst. Man Cybern. Syst., vol. 53, no. 6, pp. 3810−3822, 2023.
|
| [4] |
K. Xu, B. Meng, and Z. Wang, “Design of data-driven mode-free iterative learning controller based higher order parameter estimation for multi-agent systems consistency tracking,” Knowledge-Based Syst., vol. 261, p. 110221, 2023. doi: 10.1016/j.knosys.2022.110221
|
| [5] |
D. Shen and J.-X. Xu, “Distributed learning consensus for heterogenous high-order nonlinear multi-agent systems with output constraints,” Automatica, vol. 97, pp. 64–72, 2018. doi: 10.1016/j.automatica.2018.07.030
|
| [6] |
I. Lim, D. J. Hoelzle, and K. L. Barton, “A multi-objective iterative learning control approach for additive manufacturing applications,” Control Eng. Practice, vol. 64, pp. 74–87, 2017. doi: 10.1016/j.conengprac.2017.03.011
|
| [7] |
Z. Afkhami, D. J. Hoelzle, and K. Barton, “Robust higher-order spatial iterative learning control for additive manufacturing systems,” IEEE Trans. Control Syst. Technol., vol. 31, no. 4, pp. 1692−1707, 2023.
|
| [8] |
B. Shibani, P. Ambure, A. Purohit, P. Suratia, and S. Bhartiya, “Control of batch pulping process using data-driven constrained iterative learning control,” Comput. Chem. Eng., vol. 170, p. 108138, 2023. doi: 10.1016/j.compchemeng.2023.108138
|
| [9] |
J. Liu, W. Hong, and J. Shi, “Two dimensional (2d) feedback control scheme based on deep reinforcement learning algorithm for nonlinear non-repetitive batch processes,” in Proc. 11th Data Driven Control and Learning Systems Conf., Chengdu, China: IEEE, 2022, pp. 262–267.
|
| [10] |
N. Liu and A. Alleyne, “Iterative learning identification for linear time-varying: systems,” IEEE Trans. Control Syst. Technol., vol. 24, no. 1, pp. 310–317, 2015.
|
| [11] |
J. Wei, H. Tao, S. Hao, W. Paszke, and K. Gałkowski, “Output feedback based robust iterative learning control via a heuristic approach for batch processes with time-varying state delays and uncertainties,” J. Process Control, vol. 116, pp. 159–171, 2022. doi: 10.1016/j.jprocont.2022.06.008
|
| [12] |
B. Chu, A. Rauh, H. Aschemann, E. Rogers, and D. H. Owens, “Constrained iterative learning control for linear time-varying systems with experimental validation on a high-speed rack feeder,” IEEE Trans. Control Syst. Technol., vol. 30, no. 5, pp. 1834–1846, 2021.
|
| [13] |
K. L. Barton and A. G. Alleyne, “A norm optimal approach to time-varying ILC with application to a multi-axis robotic testbed,” IEEE Trans. Control Syst. Technol., vol. 19, no. 1, pp. 166–180, 2010.
|
| [14] |
S. Hao, T. Liu, and F. Gao, “PI based indirect-type iterative learning control for batch processes with time-varying uncertainties: A 2D FM model based approach,” J. Process Control, vol. 78, pp. 57–67, 2019. doi: 10.1016/j.jprocont.2019.04.003
|
| [15] |
S. He, W. Chen, D. Li, Y. Xi, Y. Xu, and P. Zheng, “Iterative learning control with data-driven-based compensation,” IEEE T. Cybern., vol. 52, no. 8, pp. 7492–7503, 2021.
|
| [16] |
X. Yu, X. Fang, B. Mu, and T. Chen, “Kernel-based regularized iterative learning control of repetitive linear time-varying systems,” Automatica, vol. 154, p. 111047, 2023. doi: 10.1016/j.automatica.2023.111047
|
| [17] |
D. Meng and J. Zhang, “Design and analysis of data-driven learning control: An optimization-based approach,” IEEE Trans. Neural Netw. Learn. Syst., vol. 33, no. 10, pp. 5527–5541, 2021.
|
| [18] |
H. Shen, C. Peng, H. Yan, and S. Xu, “Data-driven near optimization for fast sampling singularly perturbed systems,” IEEE Trans. Autom. Control, vol. 69, no. 7, pp. 4689−4694, 2024.
|
| [19] |
J. Wang, J. Wu, H. Shen, J. Cao, and L. Rutkowski, “Fuzzy H∞ control of discrete-time nonlinear Markov jump systems via a novel hybrid reinforcement Q-learning method,” IEEE T. Cybern., vol. 53, no. 11, pp. 7380–7391, 2022.
|
| [20] |
H. Zhang, S. Li, and Y. Zheng, “Q-learning-based model predictive control for nonlinear continuous-time systems,” Ind. Eng. Chem. Res., vol. 59, no. 40, pp. 17 987–17 999, 2020. doi: 10.1021/acs.iecr.0c02321
|
| [21] |
F. Guo, X. Zhou, J. Liu, Y. Zhang, D. Li, and H. Zhou, “A reinforcement learning decision model for online process parameters optimization from offline data in injection molding,” Appl. Soft. Comput., vol. 85, p. 105828, 2019. doi: 10.1016/j.asoc.2019.105828
|
| [22] |
Y. Ruan, Y. Zhang, T. Mao, X. Zhou, D. Li, and H. Zhou, “Trajectory optimization and positioning control for batch process using learning control,” Control Eng. Practice, vol. 85, pp. 1–10, 2019. doi: 10.1016/j.conengprac.2019.01.004
|
| [23] |
Y. Zhang, B. Chu, and Z. Shu, “Parameter optimal iterative learning control design: From model-based, data-driven to reinforcement learning,” IFAC-PapersOnLine, vol. 55, no. 12, pp. 494–499, 2022. doi: 10.1016/j.ifacol.2022.07.360
|
| [24] |
X. Wen, H. Shi, C. Su, X. Jiang, P. Li, and J. Yu, “Novel data-driven two-dimensional Q-learning for optimal tracking control of batch process with unknown dynamics,” ISA Trans., vol. 125, pp. 10–21, 2022. doi: 10.1016/j.isatra.2021.06.007
|
| [25] |
J. Liu, Z. Zhou, W. Hong, and J. Shi, “Two-dimensional iterative learning control with deep reinforcement learning compensation for the nonrepetitive uncertain batch processes,” J. Process Control, vol. 131, p. 103106, 2023. doi: 10.1016/j.jprocont.2023.103106
|
| [26] |
H. Shi, W. Gao, X. Jiang, C. Su, and P. Li, “Two-dimensional model-free Q-learning-based output feedback fault-tolerant control for batch processes,” Comput. Chem. Eng., vol. 182, p. 108583, 2024. doi: 10.1016/j.compchemeng.2024.108583
|
| [27] |
X. Jiang, M. Huang, H. Shi, X. Wang, and Y. Zhang, “Off-policy twodimensional reinforcement learning for optimal tracking control of batch processes with network-induced dropout and disturbances,” ISA Trans., vol. 144, pp. 228–244, 2024. doi: 10.1016/j.isatra.2023.11.011
|
| [28] |
H. Shi, C. Yang, X. Jiang, C. Su, and P. Li, “Novel two-dimensional off-policy: Q-learning method for output feedback optimal tracking control of batch process with unknown dynamics,” J. Process Control, vol. 113, pp. 29–41, 2022. doi: 10.1016/j.jprocont.2022.03.006
|
| [29] |
J. Shi, F. Gao, and T.-J. Wu, “Robust design of integrated feedback and iterative learning control of a batch process based on a 2D Roesser system,” J. Process Control, vol. 15, no. 8, pp. 907–924, 2005. doi: 10.1016/j.jprocont.2005.02.005
|
| [30] |
D. Bertsekas, Dynamic Programming and Optimal Control: Volume I. MIT: Athena Scientific, 2012.
|
| [31] |
J. Clifton and E. Laber, “Q-learning: Theory and applications,” Annu. Rev. Stat. Application, vol. 7, no. 1, pp. 279–301, 2020. doi: 10.1146/annurev-statistics-031219-041220
|
| [32] |
P. B. Stark and R. L. Parker, “Bounded-variable least-squares: An algorithm and applications,” Comput. Stat., vol. 10, pp. 129–129, 1995.
|
| [33] |
Y. Wang, T. Liu, and Z. Zhao, “Advanced PI control with simple learning set-point design: Application on batch processes and robust stability analysis,” Chem. Eng. Sci., vol. 71, pp. 153–165, 2012. doi: 10.1016/j.ces.2011.12.028
|
| [34] |
T. Liu, X. Z. Wang, and J. Chen, “Robust PID based indirect-type iterative learning control for batch processes with time-varying uncertainties,” J. Process Control, vol. 24, no. 12, pp. 95–106, 2014. doi: 10.1016/j.jprocont.2014.07.002
|
Figures(8) / Tables(1)






 DownLoad:
DownLoad: