A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 12
Issue 6
Volume 12
Issue 6
IEEE/CAA Journal of Automatica Sinica
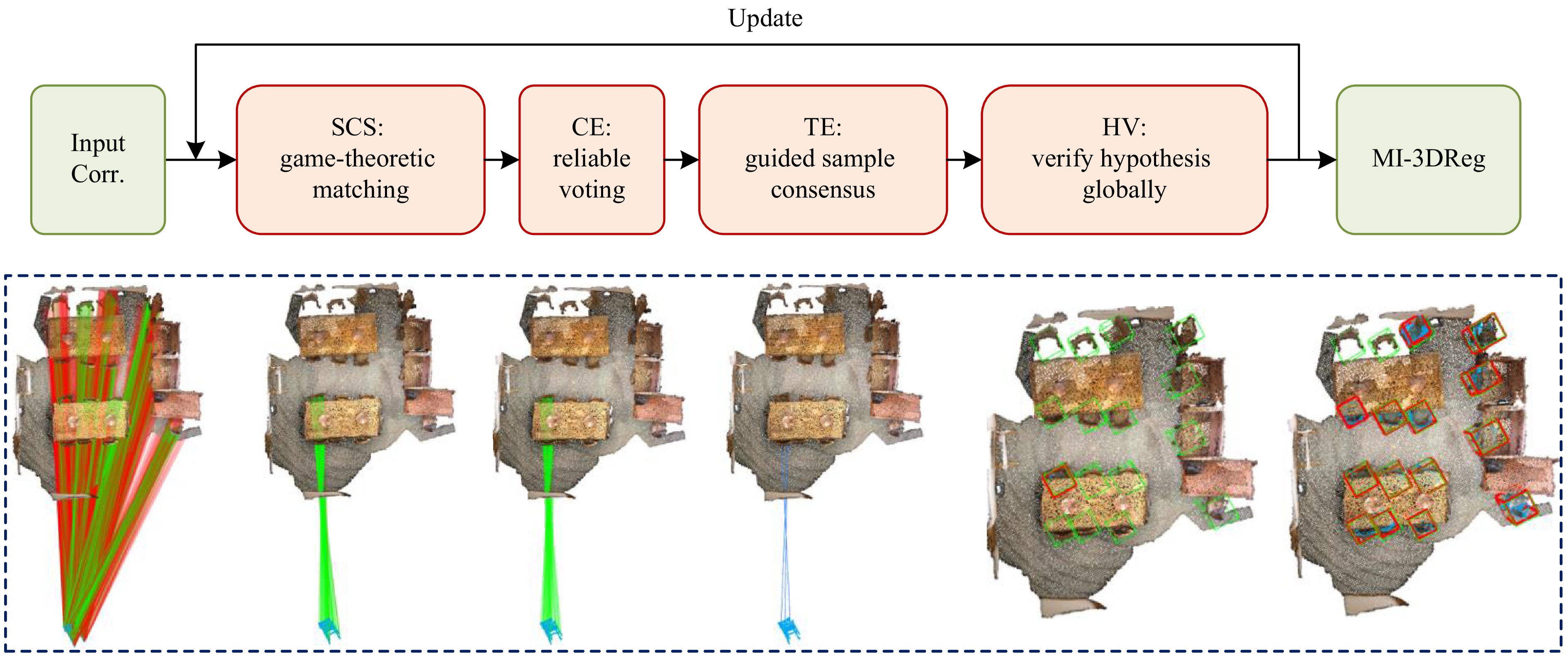
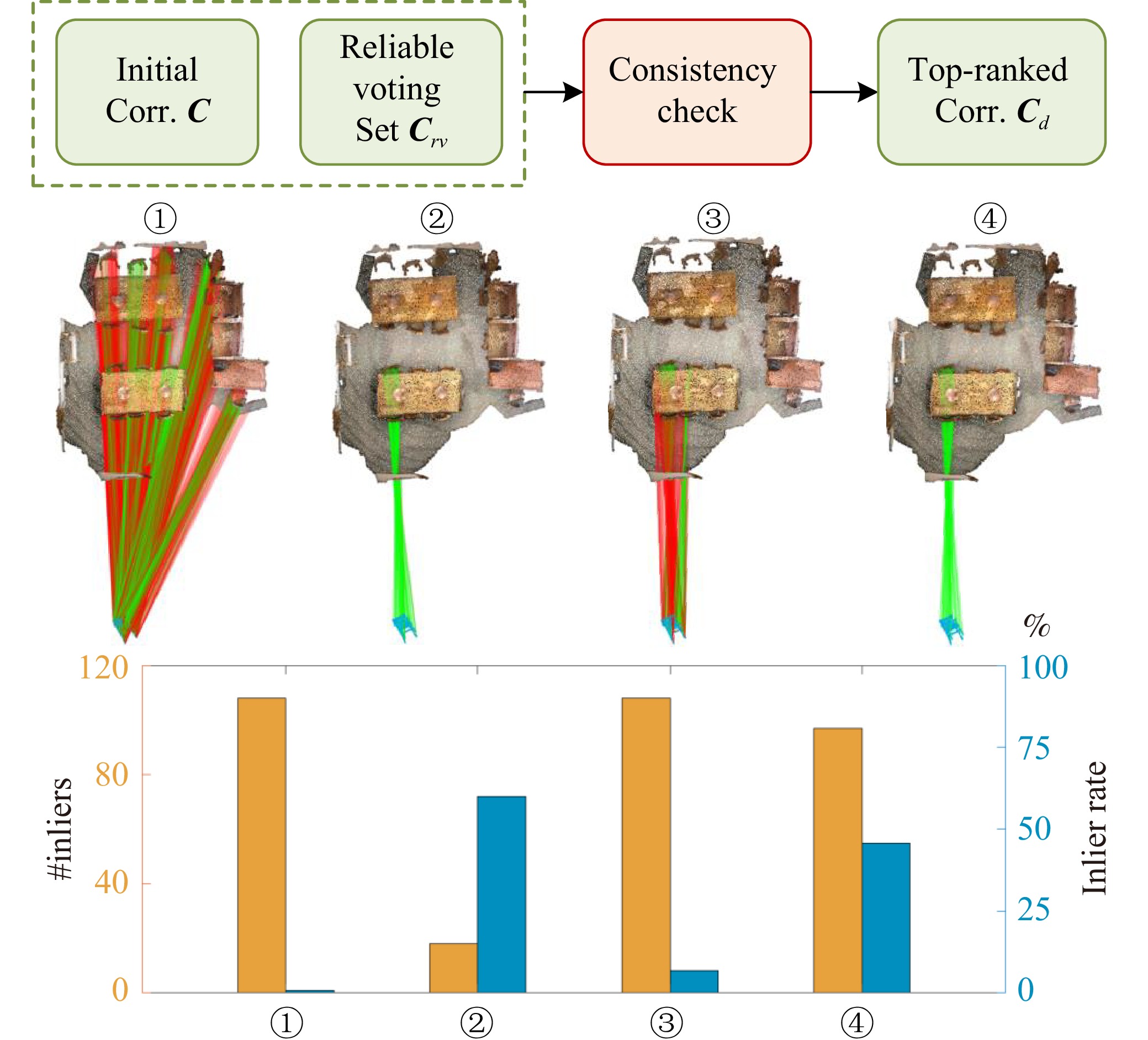
| Citation: | J. Yang, X. Cao, X. Zhang, Y. Cheng, Z. Qi, and S. Quan, “Instance by instance: An iterative framework for multi-instance 3D registration,” IEEE/CAA J. Autom. Sinica, vol. 12, no. 6, pp. 1117–1128, Jun. 2025. doi: 10.1109/JAS.2024.125058

|

| [1] |
Á. P. Bustos and T.-J. Chin, “Guaranteed outlier removal for point cloud registration with correspondences,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 40, no. 12, pp. 2868–2882, Dec. 2018. doi: 10.1109/TPAMI.2017.2773482
|
| [2] |
D. Barath and J. Matas, “Graph-cut RANSAC,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018, pp. 6733–6741.
|
| [3] |
C. Choy, W. Dong, and V. Koltun, “Deep global registration,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 2511–2520.
|
| [4] |
J. Lee, S. Kim, M. Cho, and J. Park, “Deep Hough voting for robust global registration,” in Proc. IEEE/CVF Int. Conf. Computer Vision, Montreal, Canada, 2021, pp. 15974–15983.
|
| [5] |
J. Yang, Z. Huang, S. Quan, Z. Qi, and Y. Zhang, “SAC-COT: Sample consensus by sampling compatibility triangles in graphs for 3-D point cloud registration,” IEEE Trans. Geosci. Remote Sens., vol. 60, p. 5700115, 2022.
|
| [6] |
X. Bai, Z. Luo, L. Zhou, H. Chen, L. Li, Z. Hu, H. Fu, and C.-L. Tai, “PointDSC: Robust point cloud registration using deep spatial consistency,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Nashville, USA, 2021, pp. 15854–15864.
|
| [7] |
Z. Chen, K. Sun, F. Yang, and W. Tao, “SC.2-PCR: A second order spatial compatibility for efficient and robust point cloud registration,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 13211–13221.
|
| [8] |
X. Zhang, J. Yang, S. Zhang, and Y. Zhang, “3D registration with maximal cliques,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Vancouver, Canada, 2023, pp. 17745–17754.
|
| [9] |
B. Drost, M. Ulrich, N. Navab, and S. Ilic, “Model globally, match locally: Efficient and robust 3D object recognition,” in Proc. IEEE Computer Society Conf. Computer Vision and Pattern Recognition, San Francisco, USA, 2010, pp. 998–1005.
|
| [10] |
J. Guo, X. Xing, W. Quan, D.-M. Yan, Q. Gu, Y. Liu, and X. Zhang, “Efficient center voting for object detection and 6D pose estimation in 3D point cloud,” IEEE Trans. Image Process., vol. 30, pp. 5072–5084, May 2021. doi: 10.1109/TIP.2021.3078109
|
| [11] |
W. Tang and D. Zou, “Multi-instance point cloud registration by efficient correspondence clustering,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 6657–6666.
|
| [12] |
M. Yuan, Z. Li, Q. Jin, X. Chen, and M. Wang, “PointCLM: A contrastive learning-based framework for multi-instance point cloud registration,” in Proc. 17th European Conf. Computer Vision, Tel Aviv, Israel, 2022, pp. 595–611.
|
| [13] |
Z. Yu, Z. Qin, L. Zheng, and K. Xu, “Learning instance-aware correspondences for robust multi-instance point cloud registration in cluttered scenes,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2024, pp. 19605–19614.
|
| [14] |
C. Choy, J. Park, and V. Koltun, “Fully convolutional geometric features,” in Proc. IEEE/CVF Int. Conf. Computer Vision, Seoul, Korea (South), 2019, pp. 8957–8965.
|
| [15] |
X. Bai, Z. Luo, L. Zhou, H. Fu, L. Quan, and C.-L. Tai, “D3Feat: Joint learning of dense detection and description of 3D local features,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 6358–6366.
|
| [16] |
S. Huang, Z. Gojcic, M. Usvyatsov, A. Wieser, and K. Schindler, “PREDATOR: Registration of 3D point clouds with low overlap,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Nashville, USA, 2021, pp. 4265–4274.
|
| [17] |
R. B. Rusu, N. Blodow, and M. Beetz, “Fast point feature histograms (FPFH) for 3D registration,” in Proc. IEEE Int. Conf. Robotics and Automation, Kobe, Japan, 2009, pp. 3212–3217.
|
| [18] |
A. Zeng, S. Song, M. Nießner, M. Fisher, J. Xiao, and T. Funkhouser, “3DMatch: Learning local geometric descriptors from RGB-D reconstructions,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Honolulu, USA, 2017, pp. 199–208.
|
| [19] |
S. Ao, Q. Hu, B. Yang, A. Markham, and Y. Guo, “SpinNet: Learning a general surface descriptor for 3D point cloud registration,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Nashville, USA, 2021, pp. 11748–11757.
|
| [20] |
J. Yang, K. Xian, P. Wang, and Y. Zhang, “A performance evaluation of correspondence grouping methods for 3D rigid data matching,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 43, no. 6, pp. 1859–1874, Jun. 2021. doi: 10.1109/TPAMI.2019.2960234
|
| [21] |
D. G. Lowe, “Distinctive image features from scale-invariant keypoints,” Int. J. Comput. Vision, vol. 60, no. 2, pp. 91–110, Nov. 2004. doi: 10.1023/B:VISI.0000029664.99615.94
|
| [22] |
A. Glent Buch, Y. Yang, N. Krüger, and H. Gordon Petersen, “In search of inliers: 3D correspondence by local and global voting,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Columbus, USA, 2014, pp. 2075–2082.
|
| [23] |
J. Yang, Y. Xiao, Z. Cao, and W. Yang, “Ranking 3D feature correspondences via consistency voting,” Pattern Recognit. Lett., vol. 117, pp. 1–8, Jan. 2019. doi: 10.1016/j.patrec.2018.11.018
|
| [24] |
J. Yang, X. Zhang, S. Fan, C. Ren, and Y. Zhang, “Mutual voting for ranking 3D correspondences,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 46, no. 6, pp. 4041–4057, Jun. 2024. doi: 10.1109/TPAMI.2023.3268297
|
| [25] |
M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Commun. ACM, vol. 24, no. 6, pp. 381–395, Jun. 1981. doi: 10.1145/358669.358692
|
| [26] |
M. Leordeanu and M. Hebert, “A spectral technique for correspondence problems using pairwise constraints,” in Proc. IEEE Int. Conf. Computer Vision, Beijing, China, 2005, pp. 1482–1489.
|
| [27] |
F. Tombari and L. Di Stefano, “Object recognition in 3D scenes with occlusions and clutter by Hough voting,” in Proc. 4th Pacific-Rim Symp. Image and Video Technology, Singapore, Singapore, 2010, pp. 349–355.
|
| [28] |
J. Yang, H. Li, D. Campbell, and Y. Jia, “Go-ICP: A globally optimal solution to 3D ICP point-set registration,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 38, no. 11, pp. 2241–2254, Nov. 2016. doi: 10.1109/TPAMI.2015.2513405
|
| [29] |
Á. Parra, T.-J. Chin, F. Neumann, T. Friedrich, and M. Katzmann, “A practical maximum clique algorithm for matching with pairwise constraints,” arXiv preprint arXiv: 1902.01534, 2019.
|
| [30] |
K. Fu, S. Liu, X. Luo, and M. Wang, “Robust point cloud registration framework based on deep graph matching,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Nashville, USA, 2021, pp. 8889–8898.
|
| [31] |
R. Yao, S. Du, W. Cui, A. Ye, F. Wen, H. Zhang, Z. Tian, and Y. Gao, “Hunter: Exploring high-order consistency for point cloud registration with severe outliers,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 45, no. 12, pp. 14760–14776, Dec. 2023. doi: 10.1109/TPAMI.2023.3312592
|
| [32] |
Q.-Y. Zhou, J. Park, and V. Koltun, “Fast global registration,” in Proc. 14th European Conf. Computer Vision, Amsterdam, The Netherlands, 2016, pp. 766–782.
|
| [33] |
H. Yang, J. Shi, and L. Carlone, “TEASER: Fast and certifiable point cloud registration,” IEEE Trans. Robot., vol. 37, no. 2, pp. 314–333, Apr. 2021. doi: 10.1109/TRO.2020.3033695
|
| [34] |
J. Yang, J. Chen, S. Quan, W. Wang, and Y. Zhang, “Correspondence selection with loose–tight geometric voting for 3-D point cloud registration,” IEEE Trans. Geosci. Remote Sens., vol. 60, p. 5701914, Jan. 2022.
|
| [35] |
S. Quan and J. Yang, “Compatibility-guided sampling consensus for 3-D point cloud registration,” IEEE Trans. Geosci. Remote Sens., vol. 58, no. 10, pp. 7380–7392, Oct. 2020. doi: 10.1109/TGRS.2020.2982221
|
| [36] |
Y. Cheng, Z. Huang, S. Quan, X. Cao, S. Zhang, and J. Yang, “Sampling locally, hypothesis globally: Accurate 3D point cloud registration with a RANSAC variant,” Vis. Intell., vol. 1, no. 1, p. 20, Sept. 2023. doi: 10.1007/s44267-023-00022-x
|
| [37] |
X. Huang, G. Mei, and J. Zhang, “Feature-metric registration: A fast semi-supervised approach for robust point cloud registration without correspondences,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 11363–11371.
|
| [38] |
H. Yu, F. Li, M. Saleh, B. Busam, and S. Ilic, “CoFiNet: Reliable coarse-to-fine correspondences for robust point cloud registration,” in Proc. 35th Int. Conf. Neural Information Processing Systems, 2021, pp. 1828.
|
| [39] |
Z. Qin, H. Yu, C. Wang, Y. Guo, Y. Peng, and K. Xu, “Geometric transformer for fast and robust point cloud registration,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, New Orleans, USA, 2022, pp. 11133–11142.
|
| [40] |
S. Ao, Q. Hu, H. Wang, K. Xu, and Y. Guo, “BUFFER: Balancing accuracy, efficiency, and generalizability in point cloud registration,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Vancouver, Canada, 2023, pp. 1255–1264.
|
| [41] |
T. Birdal and S. Ilic, “Point pair features based object detection and pose estimation revisited,” in Proc. Int. Conf. 3D Vision, Lyon, France, 2015, pp. 527–535.
|
| [42] |
S. Hinterstoisser, V. Lepetit, N. Rajkumar, and K. Konolige, “Going further with point pair features,” in Proc. 14th European Conf. Computer Vision, Amsterdam, The Netherlands, 2016, pp. 834–848.
|
| [43] |
J. Vidal, C.-Y. Lin, and R. Martí, “6D pose estimation using an improved method based on point pair features,” in Proc. 4th Int. Conf. Control, Automation and Robotics, Auckland, New Zealand, 2018, pp. 405–409.
|
| [44] |
L. Magri and A. Fusiello, “T-Linkage: A continuous relaxation of J-linkage for multi-model fitting,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Columbus, USA, 2014, pp. 3954–3961.
|
| [45] |
L. Magri and A. Fusiello, “Multiple model fitting as a set coverage problem,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Las Vegas, USA, 2016, pp. 3318–3326.
|
| [46] |
L. Magri and F. Andrea, “Robust multiple model fitting with preference analysis and low-rank approximation,” in Proc. British Machine Vision Conf., Swansea, UK, 2015, pp. 20.
|
| [47] |
D. Baráth and J. Matas, “Progressive-X: Efficient, anytime, multi-model fitting algorithm,” in Proc. IEEE/CVF Int. Conf. Computer Vision, Seoul, Korea (South), 2019, pp. 3779–3787.
|
| [48] |
D. Baráth, D. Rozumny, I. Eichhardt, L. Hajder, and J. Matas, “Progressive-X+: Clustering in the consensus space,” arXiv preprint arXiv: 2103.13875, 2021.
|
| [49] |
D. Baráth and J. Matas, “Multi-class model fitting by energy minimization and mode-seeking,” in Proc. 15th European Conf. Computer Vision, Munich, Germany, 2018, pp. 229–245.
|
| [50] |
F. Kluger, E. Brachmann, H. Ackermann, C. Rother, M. Y. Yang, and B. Rosenhahn, “CONSAC: Robust multi-model fitting by conditional sample consensus,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Seattle, USA, 2020, pp. 4633–4642.
|
| [51] |
Z. Li, J. Ma, and G. Xiao, “Density-guided incremental dominant instance exploration for two-view geometric model fitting,” IEEE Trans. Image Process., vol. 32, pp. 5408–5422, Sept. 2023. doi: 10.1109/TIP.2023.3318945
|
| [52] |
W. Yin, S. Lin, Y. Lu, and H. Wang, “Diverse consensuses paired with motion estimation-based multi-model fitting,” in Proc. 32nd ACM Int. Conf. Multimedia, Melbourne, Australia, 2024, pp. 9281–9290.
|
| [53] |
E. Rodolà, A. Albarelli, F. Bergamasco, and A. Torsello, “A scale independent selection process for 3D object recognition in cluttered scenes,” Int. J. Comput. Vis., vol. 102, no. 1, pp. 129–145, Mar. 2013.
|
| [54] |
A. Albarelli, E. Rodolà, and A. Torsello, “A game-theoretic approach to fine surface registration without initial motion estimation,” in Proc. IEEE Computer Society Conf. Computer Vision and Pattern Recognition, San Francisco, USA, 2010, pp. 430–437.
|
| [55] |
J. W. Weibull, Evolutionary Game Theory. Cambridge, USA: MIT Press, 1997.
|
| [56] |
J. Yang, Z. Huang, S. Quan, Q. Zhang, Y. Zhang, and Z. Cao, “Toward efficient and robust metrics for RANSAC hypotheses and 3D rigid registration,” IEEE Trans. Circuits Syst. Video Technol., vol. 32, no. 2, pp. 893–906, Feb. 2022. doi: 10.1109/TCSVT.2021.3062811
|
| [57] |
S. Quan, J. Ma, F. Hu, B. Fang, and T. Ma, “Local voxelized structure for 3D binary feature representation and robust registration of point clouds from low-cost sensors,” Inf. Sci., vol. 444, pp. 153–171, May 2018. doi: 10.1016/j.ins.2018.02.070
|
| [58] |
C. R. Qi, L. Yi, H. Su, and L. J. Guibas, “PointNet++: Deep hierarchical feature learning on point sets in a metric space,” in Proc. 31st Int. Conf. Neural Information Processing Systems, Long Beach, USA, 2017, pp. 5105–5114.
|
| [59] |
A. Avetisyan, M. Dahnert, A. Dai, M. Savva, A. X. Chang, and M. Nießner, “Scan2CAD: Learning CAD model alignment in RGB-D scans,” in Proc. IEEE/CVF Conf. Computer Vision and Pattern Recognition, Long Beach, USA, 2019, pp. 2609–2618.
|
| [60] |
M. Savva, F. Yu, H. Su, M. Aono, B. Chen, D. Cohen-Or, W. Deng, H. Su, S. Bai, X. Bai, N. Fish, J. Han, E. Kalogerakis, E. G. Learned-Miller, Y. Li, M. Liao, S. Maji, A. Tatsuma, Y. Wang, N. Zhang, and Z. Zhou, “Large-scale 3D shape retrieval from ShapeNet core55,” in Proc. Eurographics Workshop on 3D Object Retrieval, Lisbon, Portugal, 2016.
|
| [61] |
A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner, “ScanNet: Richly-annotated 3D reconstructions of indoor scenes,” in Proc. IEEE Conf. Computer Vision and Pattern Recognition, Honolulu, USA, 2017, pp. 2432–2443.
|
| [62] |
N. Otsu, “A threshold selection method from gray-level histograms,” IEEE Trans. Syst., Man, Cybern., vol. 9, no. 1, pp. 62–66, Jan. 1979. doi: 10.1109/TSMC.1979.4310076
|
| [63] |
J. Yang, Z. Huang, S. Quan, Z. Cao, and Y. Zhang, “RANSACs for 3D rigid registration: A comparative evaluation,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 10, pp. 1861–1878, Oct. 2022. doi: 10.1109/JAS.2022.105500
|
Figures(11) / Tables(12)






 DownLoad:
DownLoad: