A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 12
Volume 11
Issue 12
IEEE/CAA Journal of Automatica Sinica
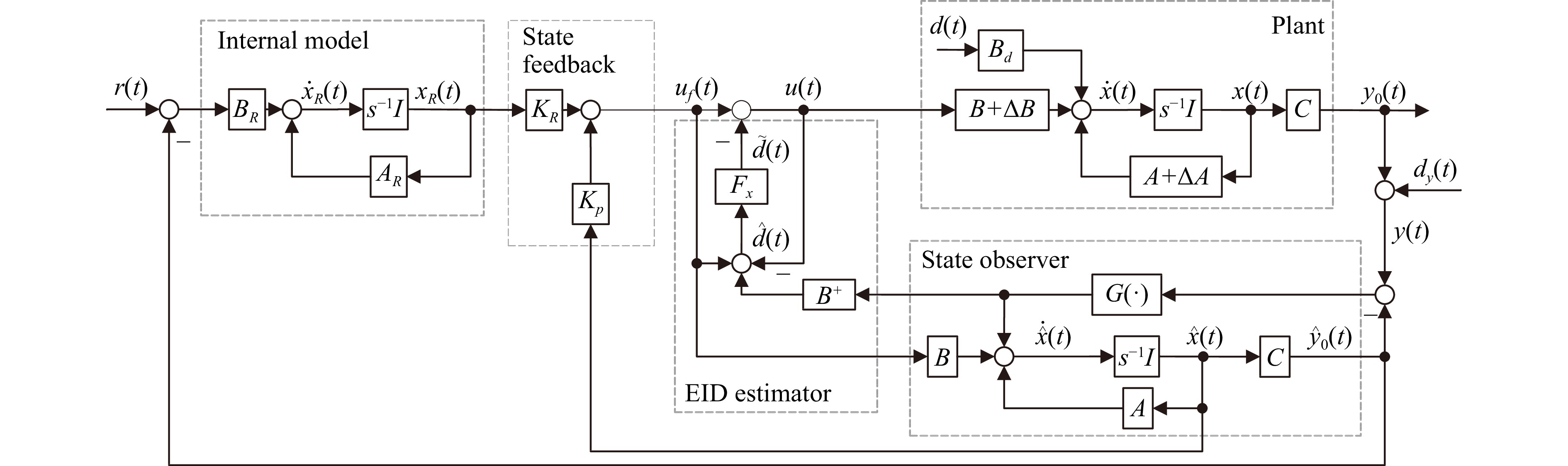
| Citation: | Q. Lu, X. Wu, J. She, F. Guo, and L. Yu, “Disturbance rejection for systems with uncertainties based on fixed-time equivalent-input-disturbance approach,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 12, pp. 2384–2395, Dec. 2024. doi: 10.1109/JAS.2024.124650

|

| [1] |
Y. Liu, C.-Y. Su, and H. Li, “Adaptive output feedback funnel control of uncertain nonlinear systems with arbitrary relative degree,” IEEE Trans. Autom. Control, vol. 66, no. 6, pp. 2854–2860, Jun. 2021. doi: 10.1109/TAC.2020.3012027
|
| [2] |
J. Yang, H. Cui, S. Li, and A. Zolotas, “Optimized active disturbance rejection control for DC-DC buck converters with uncertainties using a reduced-order GPI observer,” IEEE Trans. Circuits Syst. I Reg. Papers, vol. 65, no. 2, pp. 832–841, Feb. 2018. doi: 10.1109/TCSI.2017.2725386
|
| [3] |
C. Wen, J. Zhou, Z. Liu, and H. Su, “Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance,” IEEE Trans. Autom. Control, vol. 56, no. 7, pp. 1672–1678, Jul. 2011. doi: 10.1109/TAC.2011.2122730
|
| [4] |
J. Yang, S. Li, J. Su, and X. Yu, “Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances,” Automatica, vol. 49, no. 7, pp. 2287–2291, Jul. 2013. doi: 10.1016/j.automatica.2013.03.026
|
| [5] |
L. Qiu, Y. Shi, J. Pan, B. Xu, and H. Li, “Robust control for a networked direct-drive linear motion control system: Design and experiments,” Inf. Sci., vol. 370, pp. 725–742, Nov. 2016.
|
| [6] |
B. Kürkçü, C. Kasnakoǧlu, and M. Ö. Efe, “Disturbance/uncertainty estimator based integral sliding-mode control,” IEEE Trans Autom. Control, vol. 63, no. 11, pp. 3940–3947, Nov. 2018. doi: 10.1109/TAC.2018.2808440
|
| [7] |
O. Mofid, S. Mobayen, C. Zhang, and B. Esakki, “Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control,” ISA Trans., vol. 123, pp. 455–471, Apr. 2022. doi: 10.1016/j.isatra.2021.06.002
|
| [8] |
W.-H. Chen, J. Yang, L. Guo, and S. Li, “Disturbance-observer-based control and related methods–An overview,” IEEE Trans. Ind. Electron., vol. 63, no. 2, pp. 1083–1095, Feb. 2016. doi: 10.1109/TIE.2015.2478397
|
| [9] |
J. A. Profeta, W. G. Vogt, and M. H. Mickle, “Disturbance estimation and compensation in linear systems,” IEEE Trans. Aerosp. Electron. Syst., vol. 26, no. 2, pp. 225–231, Mar. 1990. doi: 10.1109/7.53455
|
| [10] |
K. Ohnishi, “A new servo method in mechatronics,” Trans. Jpn. Soc. Elect. Eng., vol. 107-D, pp. 83–86, 1987.
|
| [11] |
S. Kwon and W. K. Chung, “A discrete-time design and analysis of perturbation observer for motion control applications,” IEEE Trans. Control Syst. Technol., vol. 11, no. 3, pp. 399–407, May 2003. doi: 10.1109/TCST.2003.810398
|
| [12] |
J. Han, “A class of extended state observers for uncertain systems,” Control Decis., vol. 10, no. 1, pp. 85–88, Jan. 1995.
|
| [13] |
J. She, M. Fang, Y. Ohyama, H. Hashimoto, and M. Wu, “Improving disturbance-rejection performance based on an equivalent-input-disturbance approach,” IEEE Trans. Ind. Electron., vol. 55, no. 1, pp. 380–389, Jan. 2008. doi: 10.1109/TIE.2007.905976
|
| [14] |
J. She, K. Miyamoto, Q.-L. Han, M. Wu, H. Hashimoto, and Q.-G. Wang, “Generalized-extended-state-observer and equivalent-input-disturbance methods for active disturbance rejection: Deep observation and comparison,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 957–968, Apr. 2023. doi: 10.1109/JAS.2022.105929
|
| [15] |
Y. Wang, X. Wu, W.-A. Zhang, and M. Wu, “Equivalent-input-disturbance-based position synchronization control of networked multiaxis motion system,” IEEE Trans. Ind. Electron., vol. 69, no. 8, pp. 8317–8324, Aug. 2021.
|
| [16] |
P. Yu, M. Wu, J. She, K.-Z. Liu, and Y. Nakanishi, “Robust tracking and disturbance rejection for linear uncertain system with unknown state delay and disturbance,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 3, pp. 1445–1455, Jun. 2018. doi: 10.1109/TMECH.2018.2816005
|
| [17] |
L. Ouyang, M. Wu, and J. She, “Estimation of and compensation for unknown input nonlinearities using equivalent-input-disturbance approach,” Nonlinear Dyn., vol. 88, no. 3, pp. 2161–2170, Feb. 2017. doi: 10.1007/s11071-017-3369-5
|
| [18] |
Y. Du, W. Cao, M. She, J. Wu, M. Fang, and S. Kawata, “Disturbance rejection and control system design using improved equivalent-input-disturbance approach,” IEEE Trans. Ind. Electron., vol. 67, no. 4, pp. 3013–3023, Apr. 2020. doi: 10.1109/TIE.2019.2913829
|
| [19] |
Y. Du, W. Cao, J. She, M. Wu, M. Fang, and S. Kawata, “Disturbance rejection and robustness of improved equivalent-input-disturbance-based system,” IEEE Trans. Cybern., vol. 52, no. 8, pp. 8537–8546, Aug. 2022. doi: 10.1109/TCYB.2021.3053597
|
| [20] |
X. Wu, G. Huang, G, F. Guo, Q. Lu, J. She, and L. Yu, “An adaptive filter-based equivalent-input-disturbance approach for networked control systems with measurement noise,” IEEE Trans. Ind. Electron., vol. 70, no. 6, pp. 6170–6179, Jun. 2023. doi: 10.1109/TIE.2022.3198245
|
| [21] |
M. Sun, “Two-phase attractors for finite-duration consensus of multiagent systems,” IEEE Trans. Syst. Man Cybern. Syst., vol. 50, no. 5, pp. 1757–1765, May 2020. doi: 10.1109/TSMC.2017.2785314
|
| [22] |
C. P. Tan, X. Yu, and Z. Man, “Terminal sliding mode observers for a class of nonlinear systems,” Automatica, vol. 46, no. 8, pp. 1401–1404, Aug. 2010. doi: 10.1016/j.automatica.2010.05.010
|
| [23] |
F. Lopez-Ramirez, A. Polyakov, D. Efimov, and W. Perruquetti, “Finite-time and fixed-time observer design: Implicit Lyapunov function approach,” Automatica, vol. 87, pp. 52–60, Jan. 2018. doi: 10.1016/j.automatica.2017.09.007
|
| [24] |
D. Ma, Y. Xia, G. Shen, H. Jiang, and C. Hao, “Practical fixed-time disturbance rejection control for quadrotor attitude tracking,” IEEE Trans. Ind. Electron., vol. 68, no. 8, pp. 7274–7283, Aug. 2021. doi: 10.1109/TIE.2020.3001800
|
| [25] |
Y. Aoustin, C. Chevallerau, and Y. Orlov, “Finite time stabilization of a perturbed double integrator—Part II: Applications to bipedal locomotion,” in Proc. IEEE Conf. Decision Control, 2010, pp. 3554–3559.
|
| [26] |
Q. Lu, J. Chen, X. Wu, D. Zhang, J. She, and C.-Y. Su, “Disturbance rejection and control design using finite-time and fixed-time equivalent-input-disturbance approaches”, in Proc. 41st Chin. Control Conf., Hefei, China, 2022, pp. 2131–2137.
|
| [27] |
F. Lopez-Ramirez, D. Efimov, A. Polyakov, and W. Perruquetti, “Finite-time and fixed-time input-to-state stability: Explicit and implicit approaches,” Syst. Control Lett., vol. 144, p. 104775, Oct. 2020. doi: 10.1016/j.sysconle.2020.104775
|
| [28] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2106–2110, Aug. 2012. doi: 10.1109/TAC.2011.2179869
|
| [29] |
S. Dashkovskiy, D. Efimov, and E. Sontag, “Input to state estability and allied system properties,” Autom. Remote Control, vol. 72, no. 8, pp. 1579–1614, Aug. 2011. doi: 10.1134/S0005117911080017
|
| [30] |
A. Bacciotti and L. Rosier, Liapunov Functions and Stability in Control Theory, Berlin, Germany: Springer, 2005.
|
| [31] |
L. Wang, “Fixed-time pertubration-based extremum seeking control method” Ph.D. dissertation, Control and Simulation Center, Harbin Institute of Technology, Harbin, China 2020.
|
| [32] |
W. Cai, J. She, M. Wu, and Y. Ohyama, “Disturbance suppression for quadrotor UAV using sliding-mode-observer-based equivalent-input-disturbance approach,” ISA Trans., vol. 92, pp. 286–297, Sep. 2019. doi: 10.1016/j.isatra.2019.02.028
|
| [33] |
J. Wang, L. Zhao, and L. Yu, “Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation,” IEEE Trans. Ind. Electron., vol. 68, no. 1, pp. 756–766, Jan. 2020.
|
| [34] |
A. A. Prasov and H. K. Khalil, “A nonlinear high-gain observer for systems with measurement noise in a feedback control framework,” IEEE Trans. Autom. Control, vol. 58, no. 3, pp. 569–580, Mar. 2013. doi: 10.1109/TAC.2012.2218063
|
| [35] |
L. Wu, P. Mei, B. Lei, and Z. Lin, “Dead-beat terminal sliding mode control with application to DC-DC buck converters,” IEEE Trans. Circuits Syst. II: Express Briefs, vol. 70, no. 7, pp. 2470–2474, Jul. 2023.
|
| [36] |
H. Mehar, “The case study of simulation of power converter circuits using PSIM software in teaching,” American J. Educational Research, vol. 1, no. 4, pp. 137–142, 2013.
|
Figures(11)






 DownLoad:
DownLoad: