A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 5
Volume 11
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | X. Yao, H. Sun, Z. Zhao, and Y. Liu, “Event-triggered bipartite consensus tracking and vibration control of flexible Timoshenko manipulators under time-varying actuator faults,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 5, pp. 1190–1201, May 2024. doi: 10.1109/JAS.2024.124266

|
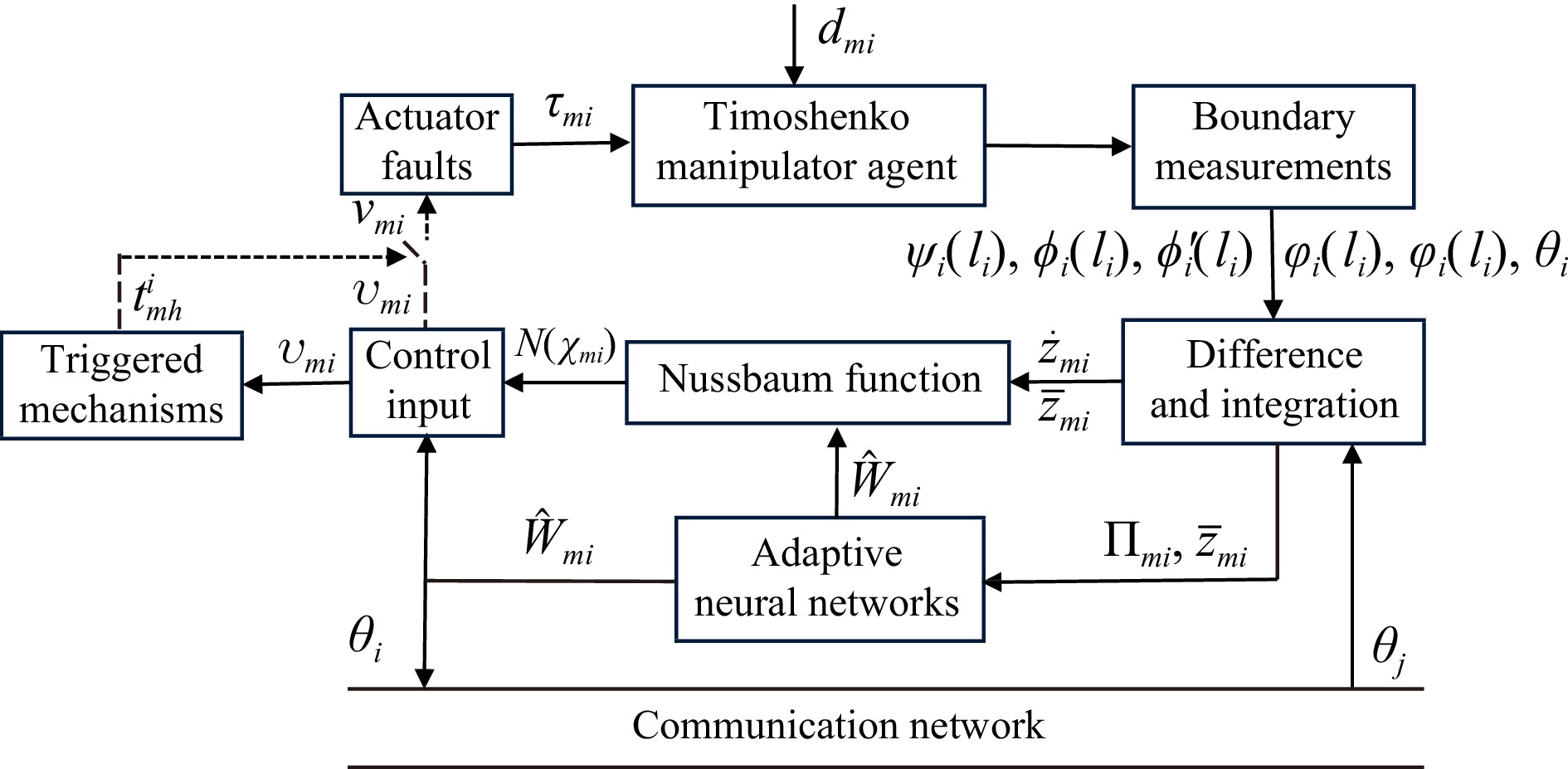
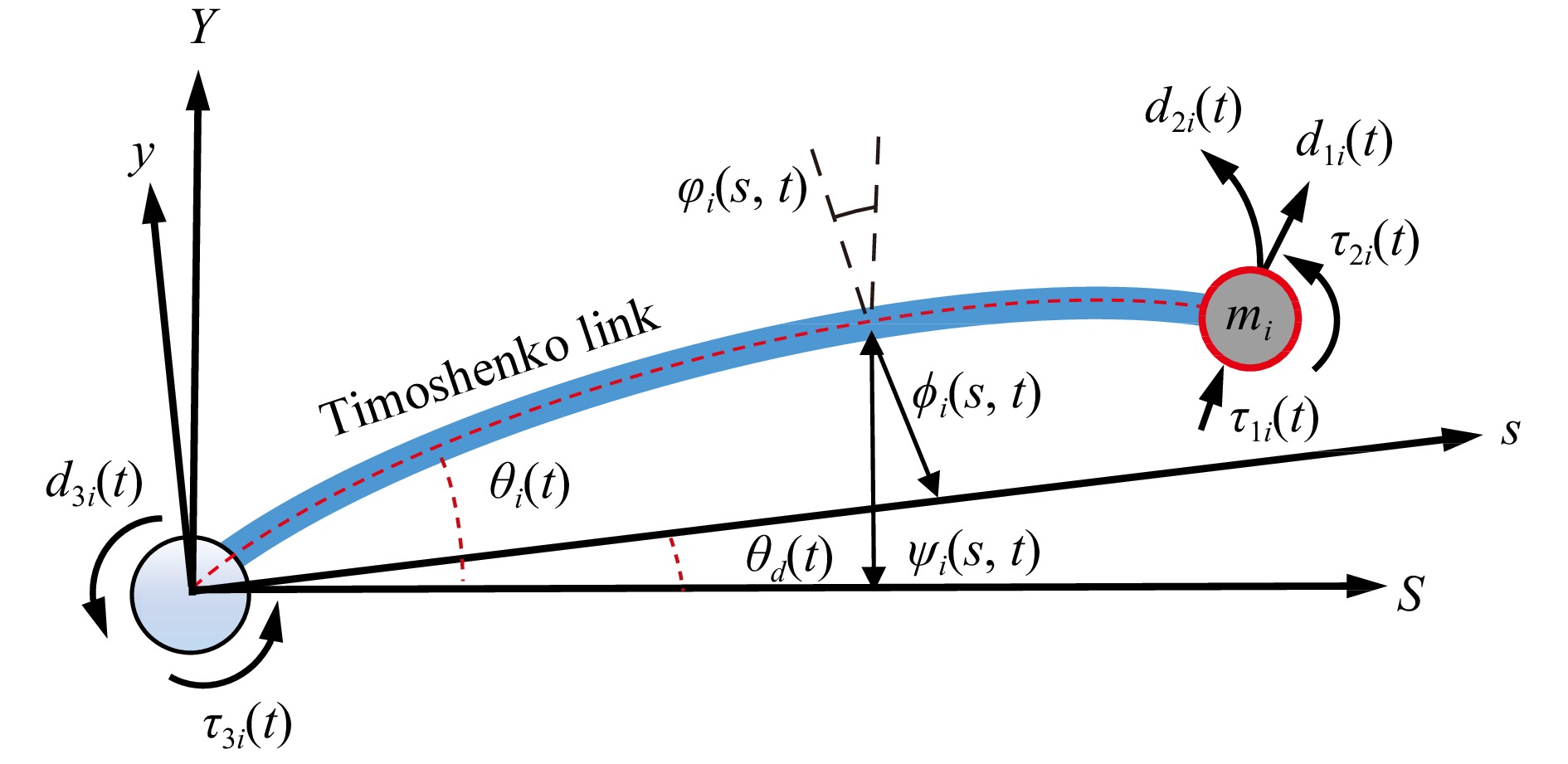
For bipartite angle consensus tracking and vibration suppression of multiple Timoshenko manipulator systems with time-varying actuator faults, parameter and modeling uncertainties, and unknown disturbances, a novel distributed boundary event-triggered control strategy is proposed in this work. In contrast to the earlier findings, time-varying consensus tracking and actuator defects are taken into account simultaneously. In addition, the constructed event-triggered control mechanism can achieve a more flexible design because it is not required to satisfy the input-to-state condition. To achieve the control objectives, some new integral control variables are given by using back-stepping technique and boundary control. Moreover, adaptive neural networks are applied to estimate system uncertainties. With the proposed event-triggered scheme, control inputs can reduce unnecessary updates. Besides, tracking errors and vibration states of the closed-looped network can be exponentially convergent into some small fields, and Zeno behaviors can be excluded. At last, some simulation examples are given to state the effectiveness of the control algorithms.

| [1] |
Y. Kikuya, S. M. Dibaji, and H. Ishii, “Fault-tolerant clock synchronization over unreliable channels in wireless sensor networks,” IEEE Trans. Control Netw. Syst., vol. 5, no. 4, pp. 1551–1562, Dec. 2018. doi: 10.1109/TCNS.2017.2732169
|
| [2] |
S. Wilson, et al., “The robotarium: Globally impactful opportunities, challenges, and lessons learned in remote-access, distributed control of multirobot systems,” IEEE Control Syst. Mag., vol. 40, no. 1, pp. 26–44, Feb. 2020. doi: 10.1109/MCS.2019.2949973
|
| [3] |
M. A. Kamel, X. Yu, and Y. Zhang, “Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: A review,” Artif. Intell. Rev., vol. 49, pp. 128–144, Feb. 2020.
|
| [4] |
F. A. Yaghmaie, R. Su, F. L. Lewis, and S. Olaru, “Bipartite and cooperative output synchronizations of linear heterogeneous agents: A unified framework,” Automatica, vol. 80, pp. 172–176, Jun. 2017. doi: 10.1016/j.automatica.2017.02.033
|
| [5] |
Y. Liu, S. Tong, and W. Wang, “Adaptive fuzzy output tracking control for a class of uncertain nonlinear systems,” Fuzzy Sets Syst., vol. 160, no. 19, pp. 2727–2754, Oct. 2009. doi: 10.1016/j.fss.2008.12.016
|
| [6] |
I. Ahmed, M. Rehan, N. Iqbal, and C. K. Ahn, “A novel event-triggered consensus approach for generic linear multi-agents under heterogeneous sector-restricted input nonlinearities,” IEEE Trans. Netw. Sci. Eng., vol. 10, no. 3, pp. 1648–1658, May–Jun. 2023. doi: 10.1109/TNSE.2022.3232779
|
| [7] |
K. Yamaguchi, T. Endo, Y. Kawai, and F. Matsuno, “Non-collocated boundary control for contact-force control of a one-link flexible arm,” J. Franklin Inst., vol. 357, no. 7, pp. 4109–4131, May 2020. doi: 10.1016/j.jfranklin.2020.01.018
|
| [8] |
Y. Liu, X. Chen, Y. Mei, and Y. Wu, “Observer-based boundary control for an asymmetric output-constrained flexible robotic manipulator,” Sci. China Inf. Sci., vol. 65, p. 139203, Mar. 2022. doi: 10.1007/s11432-019-2893-y
|
| [9] |
M. S. Queiroz, D. M. Dawson, S. P. Nagarkatti, and F. Zhang, Lyapunov-Based Control of Mechanical Systems. Boston, USA: Birkhauser, 2000.
|
| [10] |
Y. Liu and L. Li, “Adaptive leader-follower consensus control of multiple flexible manipulators with actuator failures and parameter uncertainties,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 4, pp. 1020–1031, Apr. 2023. doi: 10.1109/JAS.2023.123093
|
| [11] |
Y. Liu, Y. Mei, H. Cai, C. He, T. Liu, and G. Hu, “Asymmetric input-output constraint control of a flexible variable-length rotary crane arm,” IEEE Trans. Cybern., vol. 52, no. 10, pp. 10582–10591, Oct. 2022. doi: 10.1109/TCYB.2021.3055151
|
| [12] |
Z. Zhao and Z. Liu, “Finite-time convergence disturbance rejection control for a flexible Timoshenko manipulator,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 157–168, Jan. 2021. doi: 10.1109/JAS.2020.1003378
|
| [13] |
T. Endo, F. Matsuno, and Y. Jia, “Boundary cooperative control by flexible Timoshenko arms,” Automatica, vol. 81, pp. 377–389, Jul. 2017. doi: 10.1016/j.automatica.2017.04.017
|
| [14] |
Z. Zhao, X. He, and C. K. Ahn, “Boundary disturbance observer-based control of a vibrating single-link flexible manipulator,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 51, no. 4, pp. 2382–2390, Apr. 2021. doi: 10.1109/TSMC.2019.2912900
|
| [15] |
G. Chen, R. Vazquez, and M. Krstic, “Rapid stabilization of Timoshenko beam by PDE backstepping,” IEEE Trans. Autom. Control, vol. 69, no. 2, pp. 1141–1148, Feb. 2024. doi: 10.1109/TAC.2023.3276748
|
| [16] |
M. A. Demetriou, “Design of adaptive output feedback synchronizing controllers for networked PDEs with boundary and in-domain structured perturbations and disturbances,” Automatica, vol. 90, pp. 220–229, Feb. 2018. doi: 10.1016/j.automatica.2017.12.047
|
| [17] |
J. Deutscher, “Robust cooperative output regulation for a network of parabolic PDE systems,” IEEE Trans. Autom. Control, vol. 67, no. 1, pp. 451–459, Jan. 2022. doi: 10.1109/TAC.2021.3079352
|
| [18] |
Y. Chen, Z. Zuo, and Y. Wang, “Bipartite consensus for a network of wave PDEs over a signed directed graph,” Automatica, vol. 129, p. 109640, Jul. 2021. doi: 10.1016/j.automatica.2021.109640
|
| [19] |
T. Chen, H. Wen, and Z. Wei, “Distributed attitude tracking for multiple flexible spacecraft described by partial differential equations,” Acta Astronaut., vol. 159, pp. 637–645, Jun. 2019. doi: 10.1016/j.actaastro.2019.02.010
|
| [20] |
S. Zheng, P. Shi, S. Wang, and Y. Shi, “Adaptive neural control for a class of nonlinear multiagent systems,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 2, pp. 763–776, Feb. 2021. doi: 10.1109/TNNLS.2020.2979266
|
| [21] |
X. Yao, Y. Liu, and W. Zhao, “Adaptive boundary vibration control and angle tracking consensus of networked flexible Timoshenko manipulator systems,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 53, no. 5, pp. 2949–2960, May 2023. doi: 10.1109/TSMC.2022.3221734
|
| [22] |
L. Li and J. Liu, “Consensus tracking control and vibration suppression for nonlinear mobile flexible manipulator multi-agent systems based on PDE model,” Nonlinear Dyn., vol. 111, no. 4, pp. 3345–3359, Feb. 2023. doi: 10.1007/s11071-022-07980-9
|
| [23] |
Z. Liu, J. Liu, and W. He, “Robust adaptive fault tolerant control for a linear cascaded ODE-beam systems,” Automatica, vol. 98, pp. 42–50, Dec. 2018. doi: 10.1016/j.automatica.2018.09.021
|
| [24] |
Z. Zhao, Z. Liu, W. He, K. Hong, and H. Li, “Boundary adaptive fault-tolerant control for a flexible Timoshenko arm with backlash-like hysteresis,” Automatica, vol. 130, p. 109690, Aug. 2021. doi: 10.1016/j.automatica.2021.109690
|
| [25] |
X. Xing and J. Liu, “Robust adaptive control allocation for a class of cascade ODE-string systems with actuator failures,” IEEE Trans. Autom. Control, vol. 67, no. 3, pp. 1474–1481, Mar. 2022. doi: 10.1109/TAC.2021.3063345
|
| [26] |
Y. Ren, P. Zhu, Z. Zhao, J. Yang, and T. Zou, “Adaptive fault-tolerant boundary control for a flexible string with unknown dead zone and actuator fault,” IEEE Trans. Cybern., vol. 52, no. 7, pp. 7084–7093, Jul. 2022. doi: 10.1109/TCYB.2020.3044144
|
| [27] |
X. He, Y. Ma, M. Chen, and W. He, “Flight and vibration control of flexible air-breathing hypersonic vehicles under actuator faults,” IEEE Trans. Cybern., vol. 53, no. 5, pp. 2741–2752, May 2023. doi: 10.1109/TCYB.2022.3140536
|
| [28] |
C. Wang, C. Wen, and L. Guo, “Adaptive consensus control for nonlinear multiagent systems with unknown control directions and time-varying actuator faults,” IEEE Trans. Autom. Control, vol. 66, no. 9, pp. 4222–4229, Sept. 2021. doi: 10.1109/TAC.2020.3034209
|
| [29] |
Y. Liu, X. Yao, and W. Zhao, “Distributed neural-based fault-tolerant control of multiple flexible manipulators with input saturations,” Automatica, vol. 156, p. 111202, Jul. 2023. doi: 10.1016/j.automatica.2023.111202
|
| [30] |
F. Han and Y. Jia, “Bipartite consensus and distributed boundary control for multiple flexible manipulators associated with signed digraph,” IEEE Trans. Syst.,Man,Cybern.,Syst., vol. 52, no. 5, pp. 3005–3014, May 2022. doi: 10.1109/TSMC.2021.3062165
|
| [31] |
C. Nowzari, E. Garcia, and J. Cortés, “Event-triggered communication and control of networked systems for multi-agent consensus,” Automatica, vol. 105, pp. 1–27, Jul. 2019. doi: 10.1016/j.automatica.2019.03.009
|
| [32] |
M. Diagne and I. Karafyllis, “Event-triggered boundary control of a continuum model of highly re-entrant manufacturing systems,” Automatica, vol. 134, p. 109902, Dec. 2021. doi: 10.1016/j.automatica.2021.109902
|
| [33] |
C. Viel, M. Kieffer, H. Piet-Lahanier, and S. Bertrand, “Distributed event-triggered formation control for multi-agent systems in presence of packet losses,” Automatica, vol. 141, p. 110215, Jul. 2022. doi: 10.1016/j.automatica.2022.110215
|
| [34] |
S. Gao and J. Liu, “Event-triggered vibration control for a class of flexible mechanical systems with bending deformation and torsion deformation based on PDE model,” Mech. Syst. Signal Proc., vol. 164, p. 108255, Feb. 2022. doi: 10.1016/j.ymssp.2021.108255
|
| [35] |
X. Zhao, S. Zhang, Z. Liu, and Q. Li, “Vibration control for flexible manipulators with event-triggering mechanism and actuator failures,” IEEE Trans. Cybern., vol. 52, no. 8, pp. 7591–7601, Aug. 2022. doi: 10.1109/TCYB.2020.3041727
|
| [36] |
Z. Liu, J. Shi, X. Zhao, Z. Zhao, and H.-X. Li, “Adaptive fuzzy event-triggered control of aerial refueling hose system with actuator failures,” IEEE Trans. Fuzzy Syst., vol. 30, no. 8, pp. 2981–2992, Aug. 2022. doi: 10.1109/TFUZZ.2021.3098733
|
| [37] |
Y. Cai, H. Zhang, Z. Gao, L. Yang and Q. He, “Adaptive bipartite event-triggered time-varying output formation tracking of heterogeneous linear multi-agent systems under signed directed graph,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 10, pp. 7049–7058, Oct. 2023. doi: 10.1109/TNNLS.2021.3137393
|
| [38] |
M. Yao and G. Wei, “Dynamic event-triggered control of continuous-time systems with random impulses,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 12, pp. 2292–2299, Dec. 2023. doi: 10.1109/JAS.2023.123534
|
| [39] |
X. Du, S. Qu, H. Zhang, W. Xu, and Q. Tang, “Distributed bipartite consensus for multi-agent systems with dynamic event-triggered mechanism,” J. Frankl. Inst., vol. 360, no. 12, pp. 8877–8897, Aug. 2023. doi: 10.1016/j.jfranklin.2022.05.022
|
| [40] |
Z. Liu, J. Shi, Y. He, Z. Zhao, and H.-K. Lam, “Adaptive fuzzy control for a spatial flexible hose system with dynamic event-triggered mechanism,” IEEE Trans. Aerosp. Electron. Syst., vol. 59, no. 2, pp. 1156–1167, Apr. 2023.
|
| [41] |
S. Koga, C. Demir, and M. Krstic, “Event-triggered safe stabilizing boundary control for the Stefan PDE system with actuator dynamics,” in Proc. American Control Conf., San Diego, USA, Jul. 2023, pp. 1794–1799.
|
| [42] |
B. Rathnayake, M. Diagne, N. Espitia, and I. Karafyllis, “Observer-based event-triggered boundary control of a class of reaction-diffusion PDEs,” IEEE Trans. Autom. Control, vol. 67, no. 6, pp. 2905–2917, Jun. 2022. doi: 10.1109/TAC.2021.3094648
|
| [43] |
L. Xing, C. Wen, Z. Liu, H. Su, and J. Cai, “Event-triggered adaptive control for a class of uncertain nonlinear systems,” IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 2071–2076, Apr. 2017. doi: 10.1109/TAC.2016.2594204
|
Figures(13) / Tables(1)






 DownLoad:
DownLoad: