A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 7
Volume 11
Issue 7
IEEE/CAA Journal of Automatica Sinica
| Citation: | M. Zhou, Z. Wang, J. Wang, and Z. Cao, “Multi-robot collaborative hunting in cluttered environments with obstacle-avoiding Voronoi cells,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 7, pp. 1643–1655, Jul. 2024. doi: 10.1109/JAS.2023.124041

|
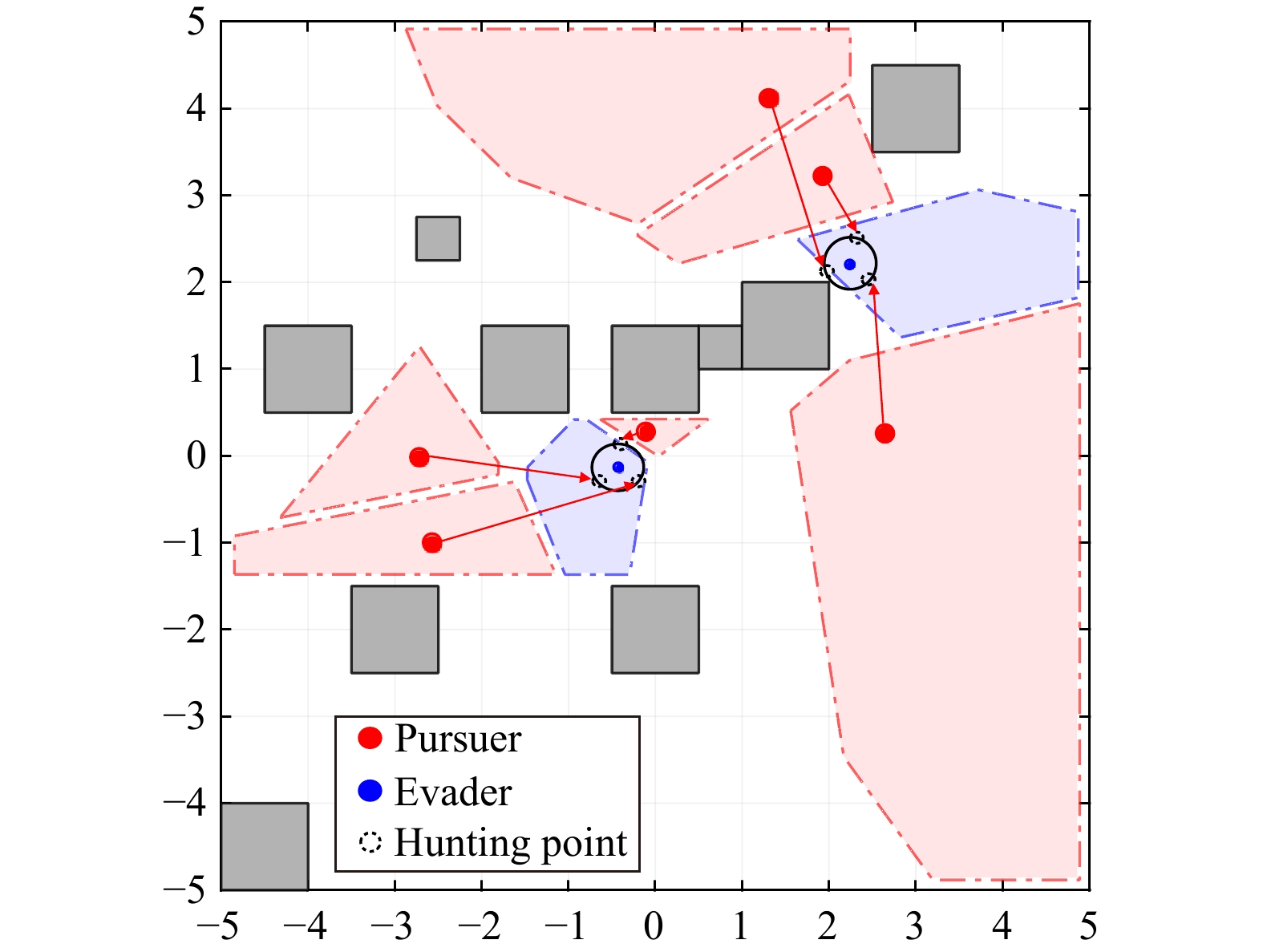
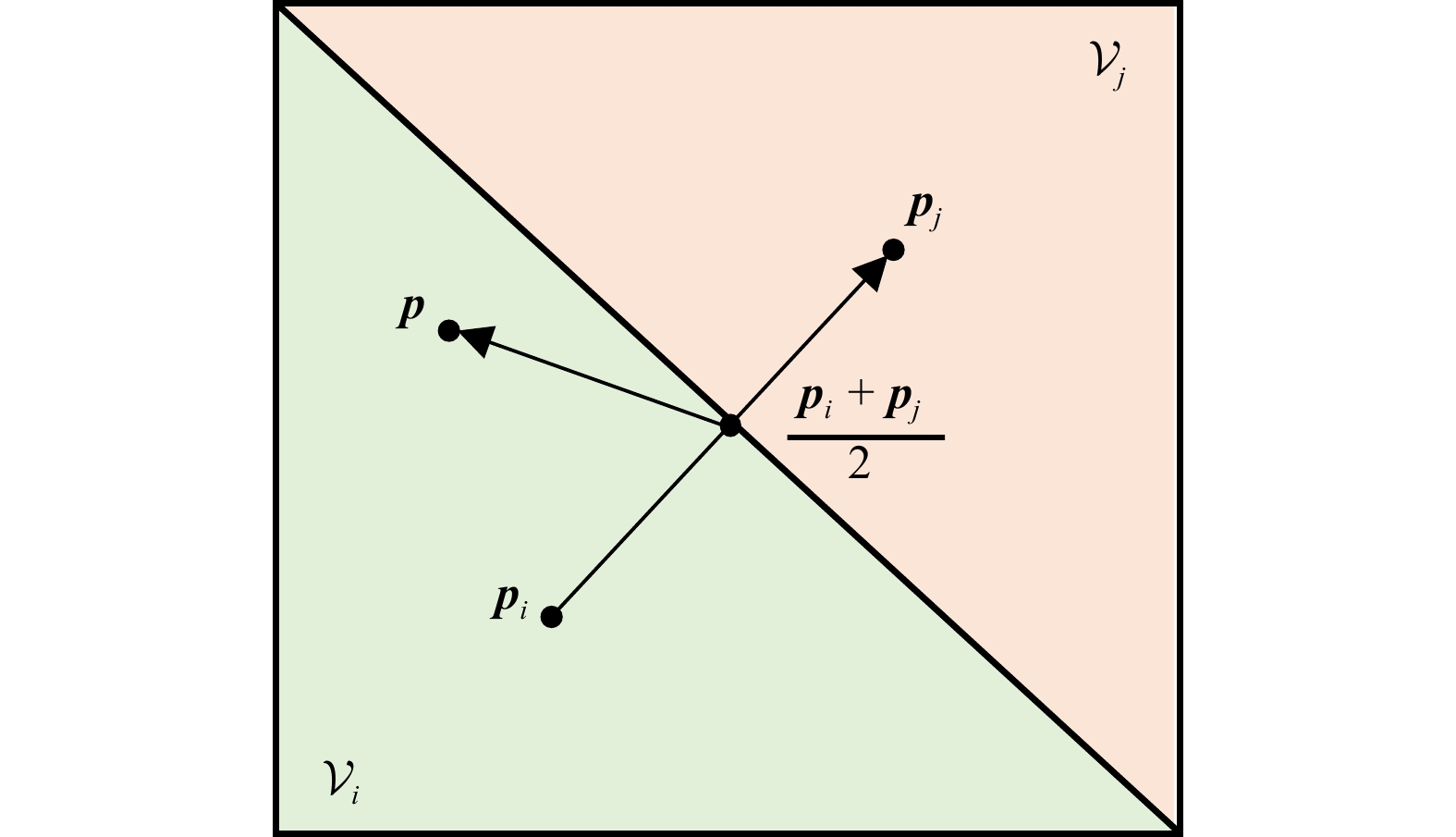
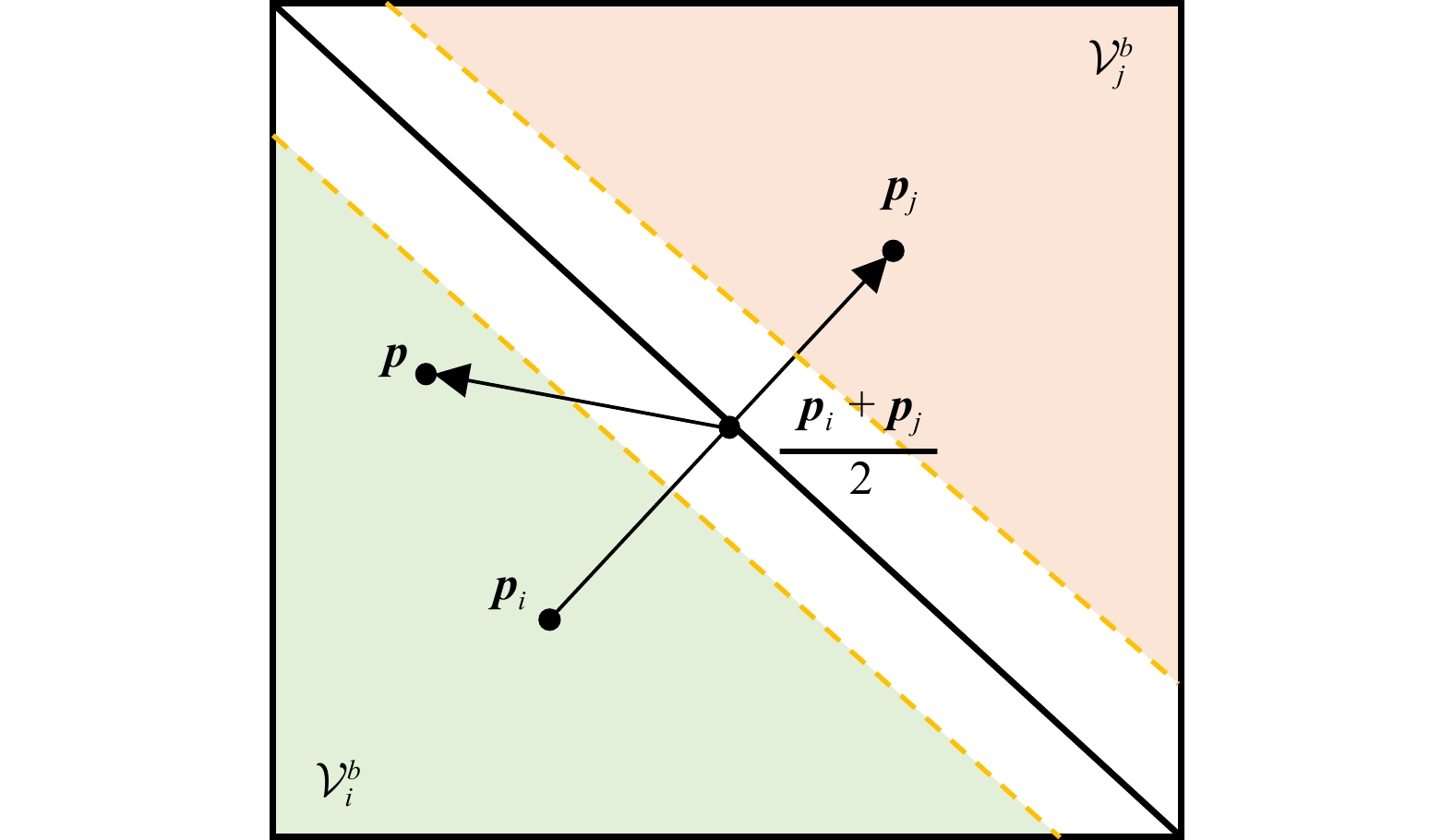
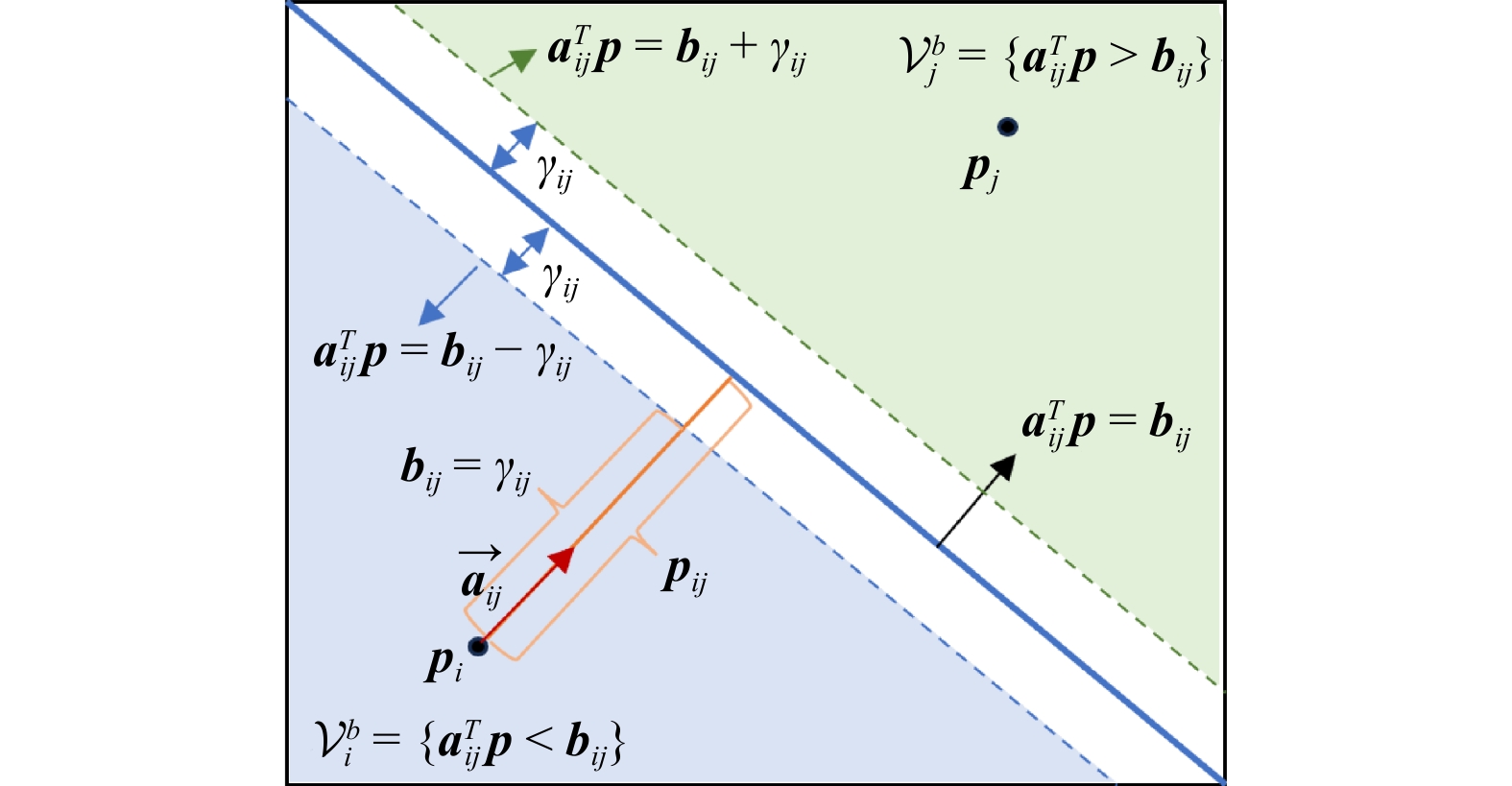
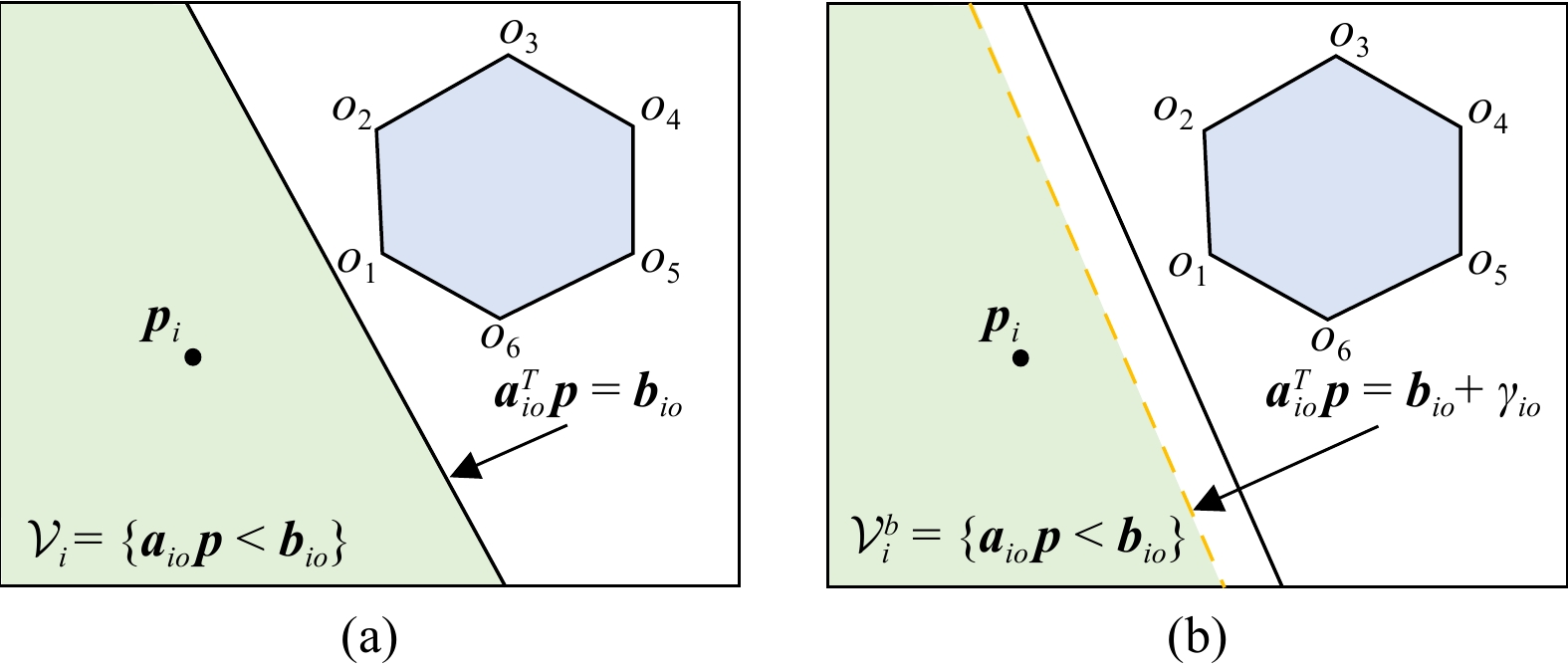
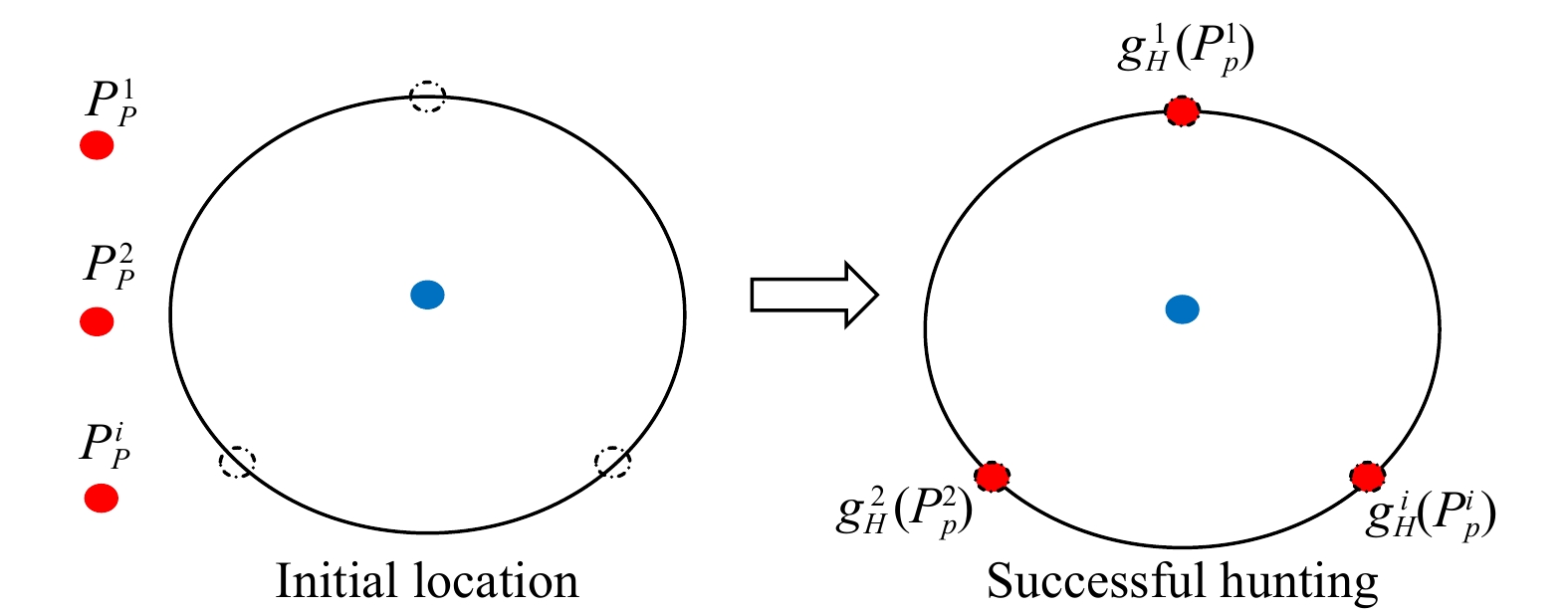
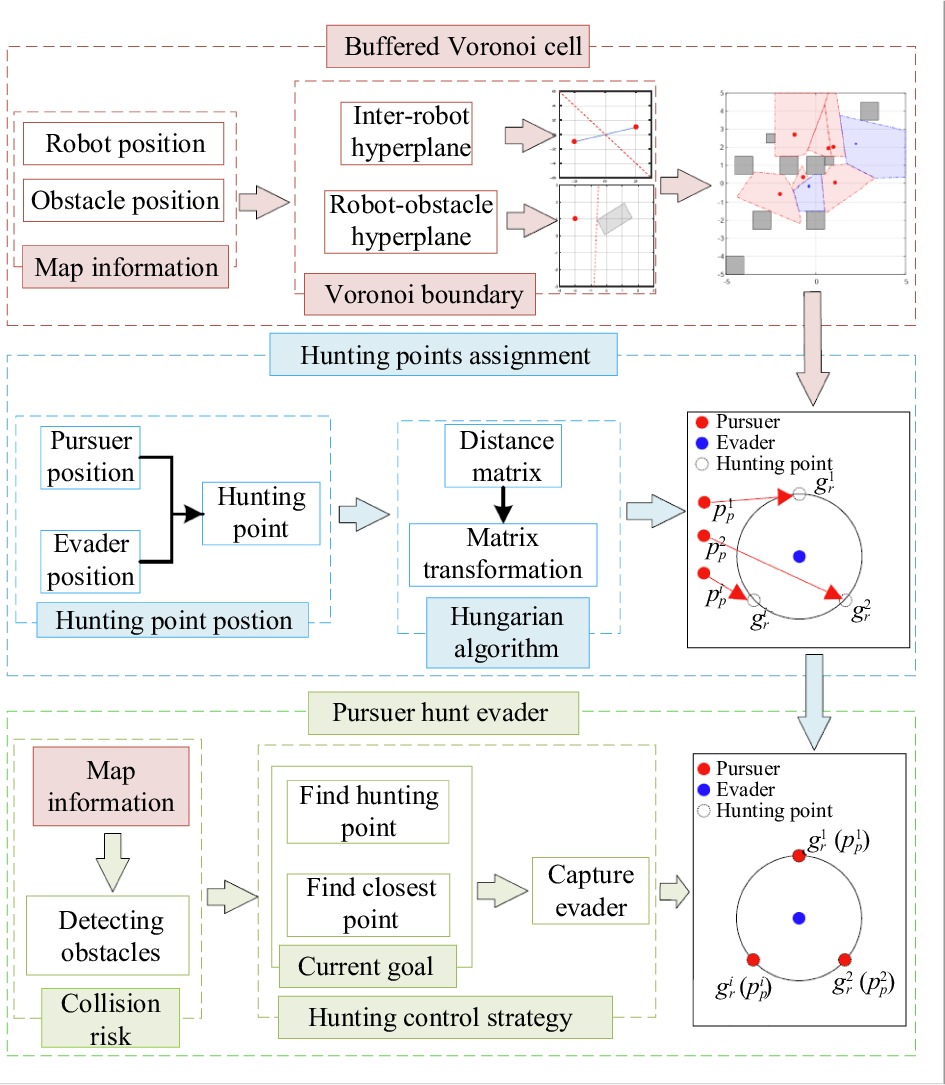
This work proposes an online collaborative hunting strategy for multi-robot systems based on obstacle-avoiding Voronoi cells in a complex dynamic environment. This involves firstly designing the construction method using a support vector machine (SVM) based on the definition of buffered Voronoi cells (BVCs). Based on the safe collision-free region of the robots, the boundary weights between the robots and the obstacles are dynamically updated such that the robots are tangent to the buffered Voronoi safety areas without intersecting with the obstacles. Then, the robots are controlled to move within their own buffered Voronoi safety area to achieve collision-avoidance with other robots and obstacles. The next step involves proposing a hunting method that optimizes collaboration between the pursuers and evaders. Some hunting points are generated and distributed evenly around a circle. Next, the pursuers are assigned to match the optimal points based on the Hungarian algorithm. Then, a hunting controller is designed to improve the containment capability and minimize containment time based on collision risk. Finally, simulation results have demonstrated that the proposed cooperative hunting method is more competitive in terms of time and travel distance.

| [1] |
L. Huang, M. Zhou, and K. Hao, “Non-dominated immune-endocrine short feedback algorithm for multi-robot maritime patrolling,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 1, pp. 362–373, 2020. doi: 10.1109/TITS.2019.2892377
|
| [2] |
X. Ge, Q. Han, Q. Wu, and X. Zhang, “Resilient and safe platooning control of connected automated vehicles against intermittent denial-of-service attacks,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1234–1251, 2023. doi: 10.1109/JAS.2022.105845
|
| [3] |
Y. Yang, L. Liao, H. Yang, and S. Li, “An optimal control strategy for multi-UAVs target tracking and cooperative competition,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 12, pp. 1931–1947, 2021. doi: 10.1109/JAS.2020.1003012
|
| [4] |
T. K. Tasooji and H. J. Marquez, “Event-triggered consensus control for multi-robot systems with cooperative localization,” IEEE Trans. Ind. Electron., vol. 70, no. 6, pp. 5982–5993, 2023.
|
| [5] |
L. Zhou and P. Tokekar, “Active target tracking with self-triggered communications in multi-robot teams,” IEEE Trans. Autom. Sci. Eng., vol. 16, no. 3, pp. 1085–1096, 2019. doi: 10.1109/TASE.2018.2867189
|
| [6] |
A. M. Aroyo, D. Pasquali, A. Kothig, F. Rea, G. Sandini, and A. Sciutti, “Expectations vs. reality: Unreliability and transparency in a treasure hunt game with icub,” IEEE Robot. Autom. Lett., vol. 6, no. 3, pp. 5681–5688, 2021. doi: 10.1109/LRA.2021.3083465
|
| [7] |
C. Venigalla and D. J. Scheeres, “Delta-V-based analysis of spacecraft pursuit-evasion games,” J. Guid. Control Dyn., vol. 44, no. 11, pp. 1961–1971, 2021. doi: 10.2514/1.G005901
|
| [8] |
K. Wan, D. Wu, Y. Zhai, B. Li, X. Gao, and Z. Hu, “An improved approach towards multi-agent pursuit-evasion game decision-making using deep reinforcement learning,” Entropy, vol. 23, no. 11, pp. 1433–1555, 2021. doi: 10.3390/e23111433
|
| [9] |
X. Ge, S. Xiao, Q.-L. Han, X. Zhang, and D. Ding, “Dynamic event-triggered scheduling and platooning control co-design for automated vehicles bver vehicular ad-hoc networks,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 31–46, 2022. doi: 10.1109/JAS.2021.1004060
|
| [10] |
J. D. Madden, R. C. Arkin, and D. R. MacNulty, “Multi-robot system based on model of wolf hunting behavior to emulate wolf and elk interactions,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, Tianjin, China, 2010, pp. 1043–1050.
|
| [11] |
J. Ni and S. X. Yang, “Bioinspired neural network for real time cooperative hunting by multirobots in unknown enviornments,” IEEE Trans. Neural Netw., vol. 22, no. 12, pp. 2062–2077, 2011. doi: 10.1109/TNN.2011.2169808
|
| [12] |
G. Wu, T. Xu, Y. Sun, and J. Zhang, “Review of multiple unmanned surface vessels collaborative search and hunting based on swarm intelligence,” Int. J. Adv. Robot. Syst., vol. 19, no. 2, p. 17298806221091885, 2022.
|
| [13] |
O. Hamed and M. Hamlich, “Improvised multi-robot cooperation strategy for hunting a dynamic target,” in Proc. Int. Symp. Advanced Electrical and Communication Technologies, Marrakech, Morocco, 2020, pp. 1–4.
|
| [14] |
J. Q. Hu, H. S. Wu, R. J. Zhen, M. Rafik, and X. W. Zhou, “Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior,” J. Syst. Eng. Electron., vol. 32, no. 6, pp. 1463–1476, 2021. doi: 10.23919/JSEE.2021.000124
|
| [15] |
R. Zhang, Q. Zong, X. Zhang, L. Dou, and B. Tian, “Game of drones: Multi-UAV pursuit-evasion game with online motion planning by deep reinforcement learning,” IEEE Trans. Neural Netw. Learn. Syst., vol. 34, no. 10, pp. 7900–7909, 2023.
|
| [16] |
M. M. Asadi, L. G. Gianoli, and D. Saussié, “Optimal vehicle-target assignment: A swarm of pursuers to intercept maneuvering evaders based on ideal proportional navigation,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 2, pp. 1316–1332, 2021.
|
| [17] |
K. Geihs, “Engineering challenges ahead for robot teamwork in dynamic environments,” Appl. Sci., vol. 10, no. 4, pp. 1368–1386, 2020. doi: 10.3390/app10041368
|
| [18] |
R. Z. Li, Z. H. Yang, and C. S. Xiao, “Cooperative hunting strategy for multi-mobile robot systems based on dynamic hunting points,” Control Eng., vol. 26, no. 3, pp. 510–514, 2019.
|
| [19] |
L. Huang, M. Zhou, K. Hao, and H. Han, “Multirobot cooperative patrolling strategy for moving objects,” IEEE Trans. Syst. Man Cybern., vol. 53, no. 5, pp. 2995–3007, 2023.
|
| [20] |
T. Zhang, J. Wang, and Q. H. Meng, “Generative adversarial network based heuristics for sampling-based path planning,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 64–74, 2022.
|
| [21] |
Z. He, C. Liu, X. Chu, R. R. Negenborn, and Q. Wu, “Dynamic anti-collision A-star algorithm for multi-ship encounter situations,” Appl. Ocean Res., vol. 118, pp. 102995–103009, 2022. doi: 10.1016/j.apor.2021.102995
|
| [22] |
D. Connell and H. M. La, “Dynamic path planning and replanning for mobile robots using RRT,” in Proc. IEEE Int. Conf. Systems, Man, and Cybernetics, Banff, Canada, 2017, pp. 1429–1434.
|
| [23] |
Z. Pan, C. Zhang, Y. Xia, H. Xiong, and X. Shao, “An improved artificial potential field method for path planning and formation control of the multi-UAV systems,” IEEE Trans. Circuits Syst. II — Express Briefs, vol. 69, no. 3, pp. 1129–1133, 2021.
|
| [24] |
J. Wang, X. Jia, T. Zhang, N. Ma, and M. Q.-H. Meng, “Deep neural network enhanced sampling-based path planning in 3D space,” IEEE Trans. Autom. Sci. Eng., vol. 19, no. 4, pp. 3434–3443, 2022.
|
| [25] |
T. T. Mac, C. Copot, D. T. Tran, and R. De Keyser, “Heuristic approaches in robot path planning: A survey,” Robot. Auton. Syst., vol. 86, pp. 13–28, 2016. doi: 10.1016/j.robot.2016.08.001
|
| [26] |
M. N. A. Wahab, S. Nefti-Meziani, and A. Adham, “A comparative review on mobile robot path planning: Classical or meta-heuristic methods?” Annu. Rev. Control, vol. 50, pp. 233–252, 2020.
|
| [27] |
L. F. Fei, D. Yun, and J. K. Jin, “Path planning and smoothing of mobile robot based on improved artificial fish swarm algorithm,” Sci Rep, vol. 12, no. 1, pp. 1–16, 2022. doi: 10.1038/s41598-021-99269-x
|
| [28] |
X. Lin, C. Maoyong, and S. Baoye, “A new approach to smooth path planning of mobile robot based on quartic bezier transition curve and improved PSO algorithm,” Neurocomputing, vol. 473, pp. 98–106, 2022. doi: 10.1016/j.neucom.2021.12.016
|
| [29] |
M. Zhou, Z. Wang, J. Wang, and Z. Dong, “A hybrid path planning and formation control strategy of multi-robots in a dynamic environment,” J. Adv. Comput. Intell. Inform., vol. 26, no. 3, pp. 342–354, 2022. doi: 10.20965/jaciii.2022.p0342
|
| [30] |
Q. Li, W. Lin, Z. Liu, and A. Prorok, “Message-aware graph attention networks for large-scale multi-robot path planning,” IEEE Robot. Autom. Lett., vol. 6, no. 3, pp. 5533–5540, 2021. doi: 10.1109/LRA.2021.3077863
|
| [31] |
Q. Li, F. Gama, A. Ribeiro, and A. Prorok, “Graph neural networks for decentralized multi-robot path planning,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Las Vegas, USA, 2020, pp. 11785–11792.
|
| [32] |
A. Mohanad, T. Daniel, and N. Cameron, “Asynchronous distributed event-triggered coordination for multiagent coverage control,” IEEE Trans. Cybern., vol. 51, no. 12, pp. 5941–5953, 2021. doi: 10.1109/TCYB.2019.2962772
|
| [33] |
N. N. Tu and L. B. Hong, “The mobile sensor deployment problem and the target coverage problem in mobile wireless sensor networks are NP-hard,” IEEE Syst. J., vol. 13, no. 2, pp. 1312–1315, 2018.
|
| [34] |
C. Jorge, “Coverage optimization and spatial load balancing by robotic sensor networks,” IEEE Trans. Autom. Control, vol. 55, no. 3, pp. 749–754, 2010. doi: 10.1109/TAC.2010.2040495
|
| [35] |
A. Pierson, Z. Wang, and M. Schwager, “Intercepting rogue robots: An algorithm for capturing multiple evaders with multiple pursuers,” IEEE Robot. Autom. Lett., vol. 2, no. 2, pp. 530–537, 2016.
|
| [36] |
H. Huang, Z. Zhou, W. Zhang, J. Ding, D. M. Stipanovic, and C. J. Tomlin, “Safe-reachable area cooperative pursuit,” IEEE Trans. Robot., vol. 10, no. 5, pp. 75–83, 2012.
|
| [37] |
Z. Zhou, W. Zhang, J. Ding, H. Huang, D. M. Stipanović, and C. J. Tomlin, “Cooperative pursuit with Voronoi partitions,” Automatica, vol. 72, pp. 64–72, 2016. doi: 10.1016/j.automatica.2016.05.007
|
| [38] |
H. Zhu and J. Alonso-Mora, “B-UAVC: Buffered uncertainty-aware Voronoi cells for probabilistic multi-robot collision avoidance,” in Proc. Int. Symp. Multi-Robot and Multi-Agent Systems, New Brunswick, USA, 2019, pp. 162–168.
|
| [39] |
H. Zhu, B. Brito, and J. Alonso-Mora, “Decentralized probabilistic multi-robot collision avoidance using buffered uncertainty-aware Voronoi cells,” Auton. Robot., vol. 46, no. 2, pp. 401–420, 2022. doi: 10.1007/s10514-021-10029-2
|
| [40] |
D. Zhou, Z. Wang, S. Bandyopadhyay, and M. Schwager, “Fast, on-line collision avoidance for dynamic vehicles using buffered Voronoi cells,” IEEE Robot. Autom. Lett., vol. 2, no. 2, pp. 1047–1054, 2017. doi: 10.1109/LRA.2017.2656241
|
| [41] |
B. Tian, P. Li, H. Lu, Q. Zong, and L. He, “Distributed pursuit of an evader with collision and obstacle avoidance,” IEEE T. Cybern., vol. 52, no. 12, pp. 13 512–13 520, 2021.
|
| [42] |
M. S. De Alencar and D. De Melo Carvalho Filho, 6 Cell Planning Using Voronoi Diagrams, River Publishers, 2017, pp. 133–154.
|
| [43] |
P. Zhang, S. Shu, and M. Zhou, “An online fault detection method based on SVM-grid for cloud computing systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 445–456, 2018. doi: 10.1109/JAS.2017.7510817
|
| [44] |
Q. Kang, L. Shi, M. Zhou, X. Wang, Q. Wu, and Z. Wei, “A distance-based weighted undersampling scheme for support vector machines and its application to imbalanced classification,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 9, pp. 4152–4165, 2017.
|
| [45] |
A. Pierson, W. Schwarting, S. Karaman, and D. Rus, “Weighted buffered Voronoi cells for distributed semi-cooperative behavior,” in Proc. IEEE Int. Conf. Robotics and Autom., Paris, France, 2020, pp. 5611–5617.
|
| [46] |
H. Zhu, “Group multi-role assignment with conflicting roles and agents,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 6, pp. 1498–1510, 2020. doi: 10.1109/JAS.2020.1003354
|
| [47] |
H. Zhu and M. Zhou, “Efficient role transfer based on Kuhn-Munkres algorithm,” IEEE Trans. Syst. Man Cybern., vol. 42, no. 2, pp. 491–496, 2011.
|
| [48] |
H. Zhu, M. Zhou, and R. Alkins, “Group role assignment via a Kuhn-Munkres algorithm-based solution,” IEEE Trans. Syst. Man Cybern., vol. 42, no. 3, pp. 739–750, 2011.
|
| [49] |
S. Chopra, G. Notarstefano, M. Rice, and M. Egerstedt, “A distributed version of the hungarian method for multirobot assignment,” IEEE Trans. Robot., vol. 33, no. 4, pp. 932–947, 2017. doi: 10.1109/TRO.2017.2693377
|
Figures(19) / Tables(5)






 DownLoad:
DownLoad: