A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 11
Volume 11
Issue 11
IEEE/CAA Journal of Automatica Sinica
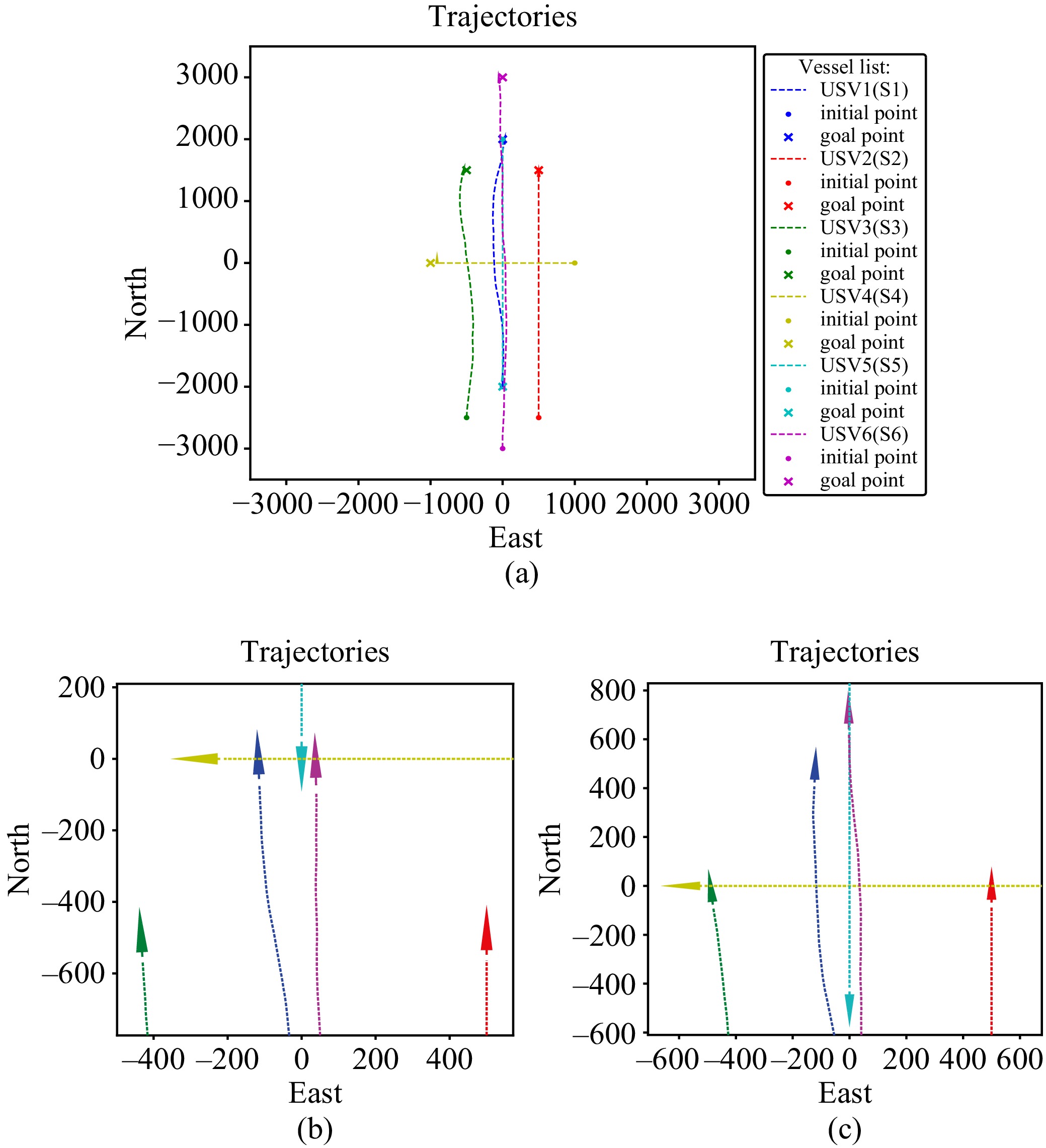
| Citation: | C.-C. Wang, Y.-L. Wang, and L. Jia, “Multi-USV formation collision avoidance via deep reinforcement learning and COLREGs,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 11, pp. 2349–2351, Nov. 2024. doi: 10.1109/JAS.2023.123846

|

| [1] |
C.-C. Wang, Y.-L. Wang, Q.-L. Han, and Y.-K. Wu, “MUTS-based cooperative target stalking for a multi-USV system,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 7, pp. 1582–1592, 2023. doi: 10.1109/JAS.2022.106007
|
| [2] |
Y. Zhao, Y. Ma, and S. Hu, “USV formation and path-following control via deep reinforcement learning with random braking,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 12, pp. 5468–5478, 2021. doi: 10.1109/TNNLS.2021.3068762
|
| [3] |
H. Shen, G. Wen, Y. Lv, J. Zhou, and L. Wang, “USV parameter estimation: Adaptive unscented Kalman filter-based approach,” IEEE Trans. Industr. Inform., vol. 19, no. 6, pp. 7751–7761, 2023. doi: 10.1109/TII.2022.3202521
|
| [4] |
L. Ma, Y.-L. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 673–684, 2023. doi: 10.1109/JAS.2022.105509
|
| [5] |
G. Wen, X. Fang, J. Zhou, and J. Zhou, “Robust formation tracking of multiple autonomous surface vessels with individual objectives: A noncooperative game-based approach,” Control Eng. Pract., vol. 119, p. 104975, 2022. doi: 10.1016/j.conengprac.2021.104975
|
| [6] |
C. L. Galimberti, L. Furieri, L. Xu, and G. Ferrari-Trecate, “Hamiltonian deep neural networks guaranteeing nonvanishing gradients by design,” IEEE Trans. Automat. Contr., vol. 68, no. 5, pp. 3155–3162, 2023. doi: 10.1109/TAC.2023.3239430
|
| [7] |
Z. Chen, L. Deng, B. Wang, G. Li, and Y. Xie, “A comprehensive and modularized statistical framework for gradient norm equality in deep neural networks,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 1, pp. 13–31, 2022. doi: 10.1109/TPAMI.2020.3010201
|
| [8] |
M. O. Turkoglu, S. D’Aronco, J. D. Wegner, and K. Schindler, “Gating revisited: Deep multi-layer rnns that can be trained,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 8, pp. 4081–4092, 2022.
|
| [9] |
T. I. Fossen, Handbook of Marine Craft Hydrodynamics and Motion Control. New York, USA: John Wiley & Sons, 2011.
|
| [10] |
R. Lowe, Y. I. Wu, A. Tamar, J. Harb, O. Pieter Abbeel, and I. Mordatch, “Multi-agent actor-critic for mixed cooperative-competitive environments,” in Proc. Advances in Neural Information Processing Systems, Long Beach, USA, 2017, pp. 6379–6390.
|
| [11] |
S. Fujimoto, H. Hoof, and D. Meger, “Addressing function approximation error in actor-critic methods,” in Proc. Int. Conf. Machine Learning, Stockholm, Sweden, 2018, pp. 1587–1596.
|
| [12] |
X. Xu, Y. Lu, X. Liu, and W. Zhang, “Intelligent collision avoidance algorithms for USVs via deep reinforcement learning under COLREGs,” Ocean Eng., vol. 217, p. 107704, 2020. doi: 10.1016/j.oceaneng.2020.107704
|
Figures(6) / Tables(1)






 DownLoad:
DownLoad: