A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 12
Volume 10
Issue 12
IEEE/CAA Journal of Automatica Sinica
| Citation: | F. Zhang and G. R. Duan, “Coupled dynamics and integrated control for position and attitude motions of spacecraft: A survey,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 12, pp. 2187–2208, Dec. 2023. doi: 10.1109/JAS.2023.123306

|
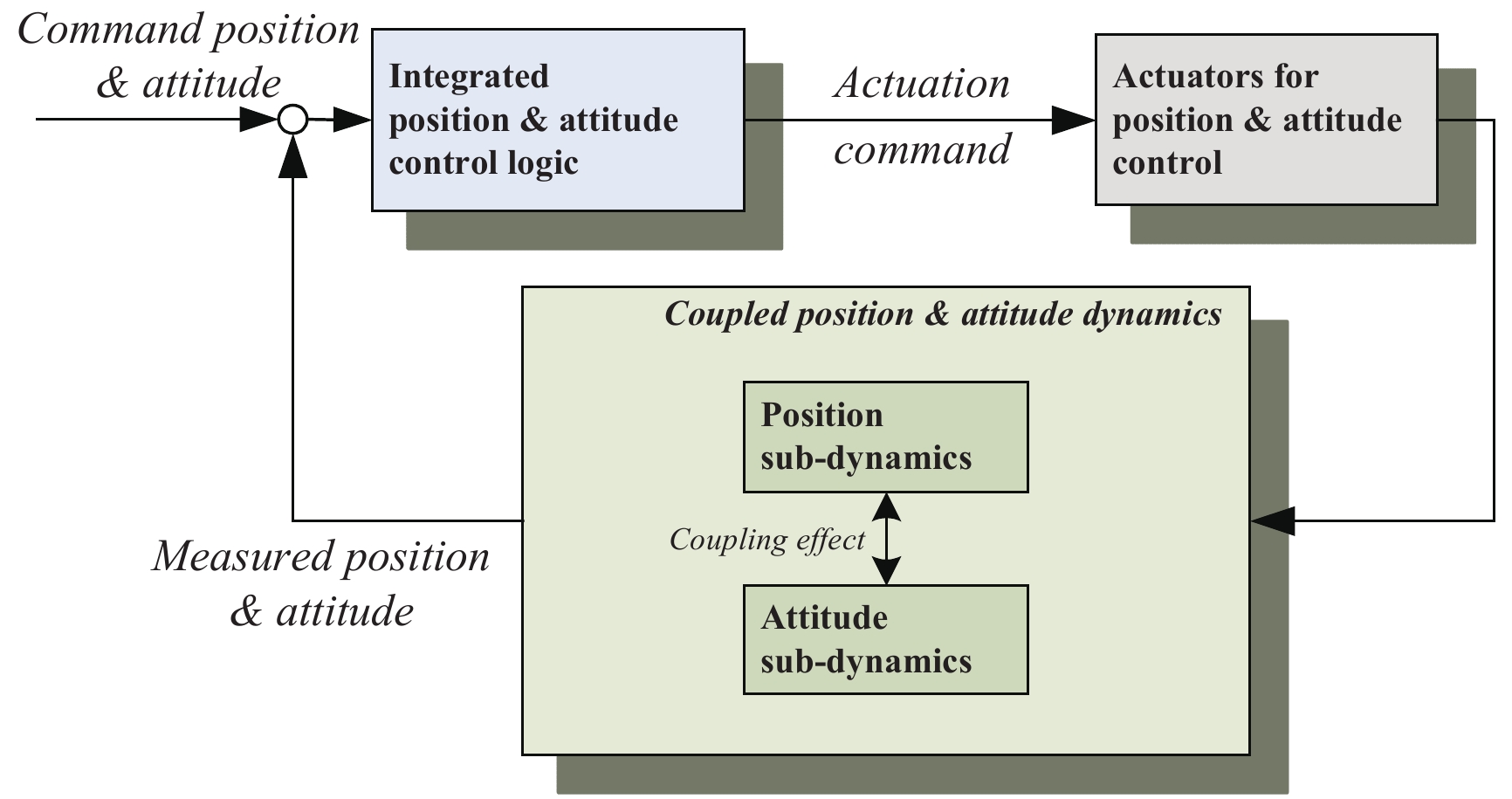
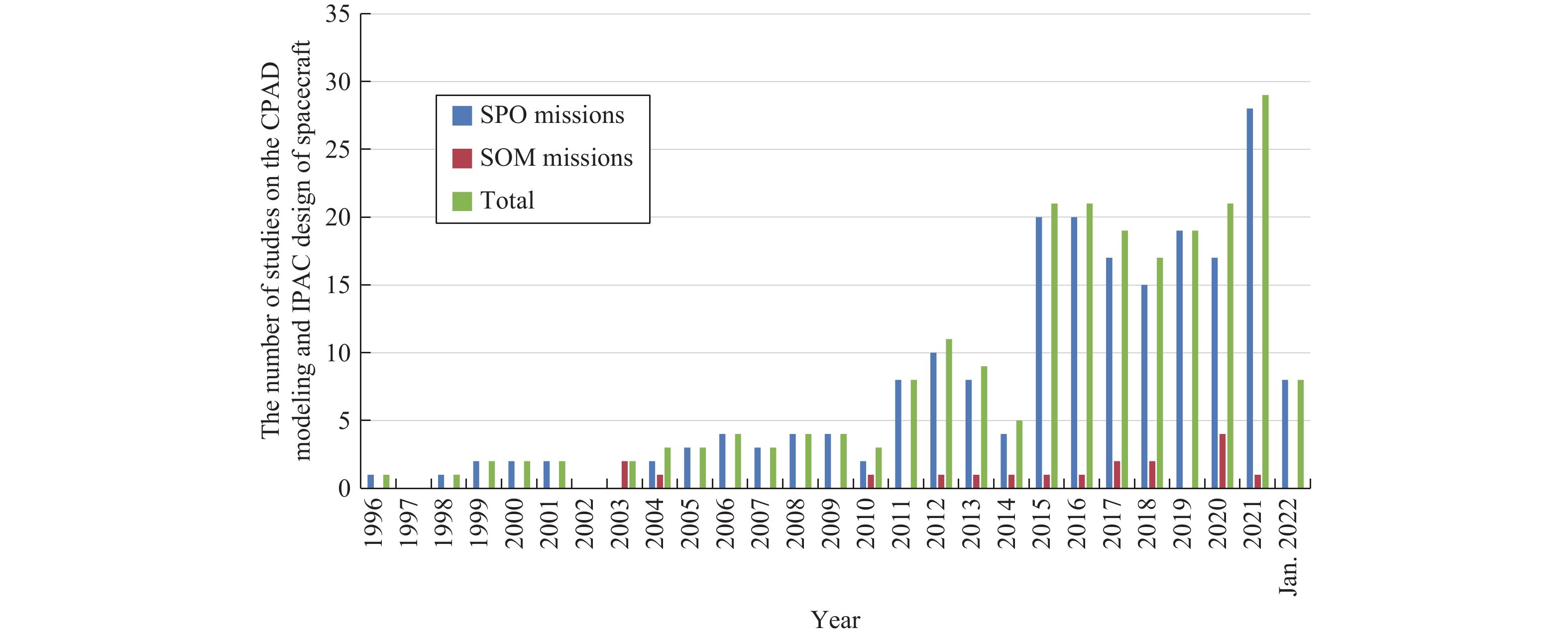
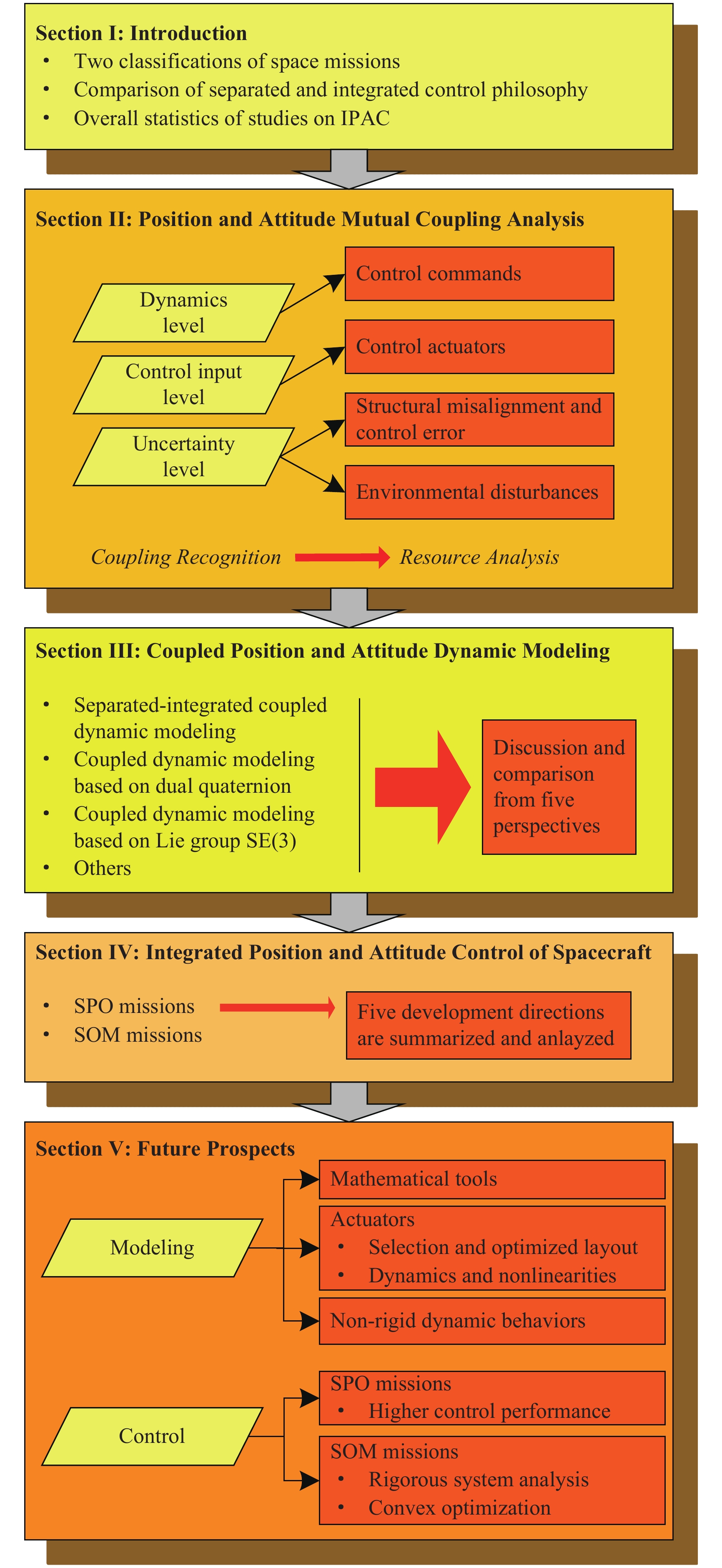
Inspired by the integrated guidance and control design for endo-atmospheric aircraft, the integrated position and attitude control of spacecraft has attracted increasing attention and gradually induced a wide variety of study results in last over two decades, fully incorporating control requirements and actuator characteristics of space missions. This paper presents a novel and comprehensive survey to the coupled position and attitude motions of spacecraft from the perspective of dynamics and control. To this end, a systematic analysis is firstly conducted in details to show the position and attitude mutual couplings of spacecraft. Particularly, in terms of the time discrepancy between spacecraft position and attitude motions, space missions can be categorized into two types: space proximity operation and space orbital maneuver. Based on this classification, the studies on the coupled dynamic modeling and the integrated control design for position and attitude motions of spacecraft are sequentially summarized and analyzed. On the one hand, various coupled position and dynamic formulations of spacecraft based on various mathematical tools are reviewed and compared from five aspects, including mission applicability, modeling simplicity, physical clearance, information matching and expansibility. On the other hand, the development of the integrated position and attitude control of spacecraft is analyzed for two space missions, and especially, five distinctive development trends are captured for space operation missions. Finally, insightful prospects on future development of the integrated position and attitude control technology of spacecraft are proposed, pointing out current primary technical issues and possible feasible solutions.

| [1] |
B. Gunston, The Cambridge Aerospace Dictionary. New York, USA: Cambridge University Press, 2004.
|
| [2] |
Y. Huang and Y. M. Jia, “Adaptive fixed-time relative position tracking and attitude synchronization control for non-cooperative target spacecraft fly-around mission,” J. Franklin Inst., vol. 354, no. 18, pp. 8461–8489, Dec. 2017. doi: 10.1016/j.jfranklin.2017.10.006
|
| [3] |
Y. Huang and Y. M. Jia, “Adaptive fixed-time six-DOF tracking control for noncooperative spacecraft fly-around mission,” IEEE Trans. Control Syst. Technol., vol. 27, no. 4, pp. 1796–1804, Jul. 2019. doi: 10.1109/TCST.2018.2812758
|
| [4] |
Y. Huang and Y. M. Jia, “Adaptive finite-time 6-DOF tracking control for spacecraft fly around with input saturation and state constraints,” IEEE Trans. Aerosp. Electron. Syst., vol. 55, no. 6, pp. 3259–3272, Dec. 2019. doi: 10.1109/TAES.2019.2906096
|
| [5] |
B. L. Chen and Y. H. Geng, “Super twisting controller for on-orbit servicing to non-cooperative target,” Chin. J. Aeronaut., vol. 28, no. 1, pp. 285–293, Feb. 2015. doi: 10.1016/j.cja.2014.12.030
|
| [6] |
J. Ventura, M. Ciarcia, M. Romano, and U. Walter, “An inverse dynamics-based trajectory planner for autonomous docking to a tumbling target,” in Proc. AIAA Guidance, Navigation, and Control Conf., San Diego, USA, 2016.
|
| [7] |
Y. Wang and H. B. Ji, “Integrated relative position and attitude control for spacecraft rendezvous with ISS and finite-time convergence,” Aerosp. Sci. Technol., vol. 85, pp. 234–245, Feb. 2019. doi: 10.1016/j.ast.2018.12.005
|
| [8] |
Q. L. Hu, Y. Y. Liu, and Y. M. Zhang, “Control of non-cooperative spacecraft in final phase proximity operations under input constraints,” Control Eng. Pract., vol. 87, pp. 83–96, Jun. 2019. doi: 10.1016/j.conengprac.2019.04.001
|
| [9] |
B. Z. Zhou, X. F. Liu, and G. P. Cai, “Motion-planning and pose-tracking based rendezvous and docking with a tumbling target,” Adv. Space Res., vol. 65, no. 4, pp. 1139–1157, Feb. 2020. doi: 10.1016/j.asr.2019.11.013
|
| [10] |
X. T. Zhao and S. J. Zhang, “Adaptive saturated control for spacecraft rendezvous and docking under motion constraints,” Aerosp. Sci. Technol., vol. 114, p. 106739, Jul. 2021. doi: 10.1016/j.ast.2021.106739
|
| [11] |
X. D. Shao, Q. L. Hu, and Y. Shi, “Adaptive pose control for spacecraft proximity operations with prescribed performance under spatial motion constraints,” IEEE Trans. Control Syst. Technol., vol. 29, no. 4, pp. 1405–1419, Jul. 2021. doi: 10.1109/TCST.2020.3005966
|
| [12] |
P. K. C. Wang, F. Y. Hadaegh, and K. Lau, “Synchronized formation rotation and attitude control of multiple free-flying spacecraft,” J. Guid.,Control,Dyn., vol. 22, no. 1, pp. 28–35, Jan.–Feb. 1999. doi: 10.2514/2.4367
|
| [13] |
R. W. Beard, J. Lawton, and F. Y. Hadaegh, “A coordination architecture for spacecraft formation control,” IEEE Trans. Control Syst. Technol., vol. 9, no. 6, pp. 777–790, Nov. 2001. doi: 10.1109/87.960341
|
| [14] |
M. Xin, S. N. Balakrishnan, and H. J. Pernicka, “Multiple spacecraft formation control with θ-D method,” IET Control Theory Appl., vol. 1, no. 2, pp. 485–493, Mar. 2007. doi: 10.1049/iet-cta:20050410
|
| [15] |
X. Huang, Y. Yan, Y. Zhou, and Y. N. Yang, “Dual-quaternion based distributed coordination control of six-DOF spacecraft formation with collision avoidance,” Aerosp. Sci. Technol., vol. 67, pp. 443–455, Aug. 2017. doi: 10.1016/j.ast.2017.04.011
|
| [16] |
D. Lee, A. K. Sanyal, E. A. Butcher, and D. J. Scheeres, “Finite-time control for spacecraft body-fixed hovering over an asteroid,” IEEE Trans. Aerosp. Electron. Syst., vol. 51, no. 1, pp. 506–520, Jan. 2015. doi: 10.1109/TAES.2014.140197
|
| [17] |
D. Lee and G. Vukovich, “Adaptive finite-time control for spacecraft hovering over an asteroid,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 3, pp. 1183–1196, Jun. 2016. doi: 10.1109/TAES.2015.140822
|
| [18] |
G. Vukovich and H. C. Gui, “Robust adaptive tracking of rigid-body motion with applications to asteroid proximity operations,” IEEE Trans. Aerosp. Electron. Syst., vol. 53, no. 1, pp. 419–430, Feb. 2017. doi: 10.1109/TAES.2017.2650778
|
| [19] |
B. Gaudet, R. Linares, and R. Furfaro, “Six degree-of-freedom body-fixed hovering over unmapped asteroids via LIDAR altimetry and reinforcement meta-learning,” Acta Astronaut., vol. 172, pp. 90–99, Jul. 2020. doi: 10.1016/j.actaastro.2020.03.026
|
| [20] |
N. Filipe, A. Valverde, and P. Tsiotras, “Pose tracking without linearand angular-velocity feedback using dual quaternions,” IEEE Trans. Aerosp. Electron. Syst., vol. 52, no. 1, pp. 411–422, Feb. 2016. doi: 10.1109/TAES.2015.150046
|
| [21] |
H. C. Gui and A. H. J. de Ruiter, “Adaptive fault-tolerant spacecraft pose tracking with control allocation,” IEEE Trans. Control Syst. Technol., vol. 27, no. 2, pp. 479–494, Mar. 2019. doi: 10.1109/TCST.2017.2771374
|
| [22] |
S. X. Wu, L. Chen, D. X. Zhang, J. L. Chen, and X. W. Shao, “Disturbance observer based fixed time sliding mode control for spacecraft proximity operations with coupled dynamics,” Adv. Space Res., vol. 66, no. 9, pp. 2179–2193, Nov. 2020. doi: 10.1016/j.asr.2020.07.034
|
| [23] |
G. Q. Wu, S. N. Wu, and Z. G. Wu, “Robust finite-time control for spacecraft with coupled translation and attitude dynamics,” Math. Probl. Eng., vol. 2013, p. 707485, Jan. 2013.
|
| [24] |
C. Pukdeboon, “Output feedback second order sliding mode control for spacecraft attitude and translation motion,” Int. J. Control,Autom. Syst., vol. 14, no. 2, pp. 411–424, Apr. 2016. doi: 10.1007/s12555-014-0237-7
|
| [25] |
H. Y. Dong, Q. L. Hu, M. R. Akella, and F. Mazenc, “Partial Lyapunov strictification: Dual-quaternion-based observer for 6-DOF tracking control,” IEEE Trans. Control Syst. Technol., vol. 27, no. 6, pp. 2453–2469, Nov. 2019. doi: 10.1109/TCST.2018.2864723
|
| [26] |
L. Sun and W. Huo, “Adaptive fuzzy control of spacecraft proximity operations using hierarchical fuzzy systems,” IEEE/ASME Trans. Mechatron., vol. 21, no. 3, pp. 1629–1640, Jun. 2016. doi: 10.1109/TMECH.2015.2494607
|
| [27] |
G. Di Mauro, M. Schlotterer, S. Theil, and M. Lavagna, “Nonlinear control for proximity operations based on differential algebra,” J. Guid.,Control,Dyn., vol. 38, no. 11, pp. 2173–2187, Nov. 2015. doi: 10.2514/1.G000842
|
| [28] |
L. C. Zhu and S. Q. Wang, “Rotating object specific tracking based on orbit-attitude coordinated adaptive control,” J. Guid.,Control,Dyn., vol. 44, no. 2, pp. 266–282, Feb. 2021. doi: 10.2514/1.G005251
|
| [29] |
S. Segal and P. Gurfil, “Effect of kinematic rotation-translation coupling on relative spacecraft translational dynamics,” J. Guid.,Control,Dyn., vol. 32, no. 3, pp. 1045–1050, May 2009. doi: 10.2514/1.39320
|
| [30] |
D. Lee and G. Vukovich, “Kinematically coupled spacecraft relative motion without attitude synchronization assumption,” Aerosp. Sci. Technol., vol. 45, pp. 316–323, Sept. 2015. doi: 10.1016/j.ast.2015.05.020
|
| [31] |
Y. H. Wu, X. B. Cao, Y. J. Xing, P. F. Zheng, and S. J. Zhang, “Relative motion coupled control for formation flying spacecraft via convex optimization,” Aerosp. Sci. Technol., vol. 14, no. 6, pp. 415–428, Sept. 2010. doi: 10.1016/j.ast.2010.04.005
|
| [32] |
F. Zhang, G. R. Duan, and B. Zhou, “Robust adaptive control for a class of cascaded nonlinear systems with applications to space interception,” Int. J. Robust Nonlinear Control, vol. 24, no. 15, pp. 2048–2078, Oct. 2014. doi: 10.1002/rnc.2972
|
| [33] |
F. Zhang, “Robust integrated translational and rotational control for spacecraft rendezvous in unstructured environments,” Trans. Inst. Meas. Control, vol. 40, no. 11, pp. 3293–3313, Jul. 2018. doi: 10.1177/0142331217697373
|
| [34] |
J. Q. Zhang, J. D. Biggs, D. Ye, and Z. W. Sun, “Finite-time attitude set-point tracking for thrust-vectoring spacecraft rendezvous,” Aerosp. Sci. Technol., vol. 96, p. 105588, Jan. 2020. doi: 10.1016/j.ast.2019.105588
|
| [35] |
J. D. Biggs and S. Brisotto, “Robust spacecraft rendezvous using a variable speed control moment gyro and thruster,” Aerosp. Sci. Technol., vol. 112, p. 106644, May 2021. doi: 10.1016/j.ast.2021.106644
|
| [36] |
F. Zhang and G. R. Duan, “Integrated translational and rotational control for the terminal landing phase of a lunar module,” Aerosp. Sci. Technol., vol. 27, no. 1, pp. 112–126, Jun. 2013. doi: 10.1016/j.ast.2012.07.003
|
| [37] |
U. Lee and M. Mesbahi, “Constrained autonomous precision landing via dual quaternions and model predictive control,” J. Guid.,Control,Dyn., vol. 40, no. 2, pp. 292–308, Feb. 2017. doi: 10.2514/1.G001879
|
| [38] |
M. Szmuk, T. P. Reynolds, and B. Açımathkmeşe, “Successive convexification for real-time six-degree-of-freedom powered descent guidance with state-triggered constraints,” J. Guid.,Control,Dyn., vol. 43, no. 8, pp. 1399–1413, Aug. 2020. doi: 10.2514/1.G004549
|
| [39] |
Q. Q. Dang, H. C. Gui, K. Liu, and B. Zhu, “Relaxed-constraint pinpoint lunar landing using geometric mechanics and model predictive control,” J. Guid.,Control,Dyn., vol. 43, no. 9, pp. 1617–1630, Sept. 2020. doi: 10.2514/1.G005039
|
| [40] |
D. Fragopoulos and M. Innocenti, “Autonomous spacecraft 6DOF relative motion control using quaternions and H-infinity methods,” in Proc. AIAA Guidance, Navigation, and Control Conf., San Diego, USA, 1996.
|
| [41] |
Y. J. Xu, A. Tatasch, and N. Fitz-Coy, “Chattering free sliding mode control for a 6 DOF formation flying mission,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, San Francisco, USA, 2005.
|
| [42] |
L. Ji, K. Liu, and J. H. Xiang, “On all-propulsion design of integrated orbit and attitude control for inner-formation gravity field measurement satellite,” Sci. China Technol. Sci., vol. 54, no. 12, pp. 3233–3242, Dec. 2011. doi: 10.1007/s11431-011-4621-8
|
| [43] |
J. Bae and Y. Kim, “Adaptive controller design for spacecraft formation flying using sliding mode controller and neural networks,” J. Franklin Inst., vol. 349, no. 2, pp. 578–603, Mar. 2012. doi: 10.1016/j.jfranklin.2011.08.009
|
| [44] |
F. Zhang and G. R. Duan, “Integrated translational and rotational finite-time maneuver of a rigid spacecraft with actuator misalignment,” IET Control Theory Appl., vol. 6, no. 9, pp. 1192–1204, Jun. 2012. doi: 10.1049/iet-cta.2011.0413
|
| [45] |
F. Zhang and G. R. Duan, “Robust adaptive integrated translation and rotation control of a rigid spacecraft with control saturation and actuator misalignment,” Acta Astronaut., vol. 86, pp. 167–187, May–Jun. 2013. doi: 10.1016/j.actaastro.2013.01.010
|
| [46] |
F. Zhang and G. R. Duan, “Robust adaptive integrated translation and rotation finite-time control of a rigid spacecraft with actuator misalignment and unknown mass property,” Int. J. Syst. Sci., vol. 45, no. 5, pp. 1007–1034, May 2014. doi: 10.1080/00207721.2012.743618
|
| [47] |
J. Q. Zhang, D. Ye, Z. W. Sun, and C. Liu, “Extended state observer based robust adaptive control on SE(3) for coupled spacecraft tracking maneuver with actuator saturation and misalignment,” Acta Astronaut., vol. 143, pp. 221–233, Feb. 2018. doi: 10.1016/j.actaastro.2017.11.034
|
| [48] |
Q. L. Hu, W. Chen, and Y. M. Zhang, “Concurrent proximity control of servicing spacecraft with an uncontrolled target,” IEEE/ASME Trans. Mechatron., vol. 24, no. 6, pp. 2815–2826, Dec. 2019. doi: 10.1109/TMECH.2019.2944387
|
| [49] |
Q. Zhao and G. R. Duan, “Integrated design of trajectory tracking and inertia property identification for post-capture of non-cooperative target,” Aerosp. Sci. Technol., vol. 95, p. 105437, Dec. 2019. doi: 10.1016/j.ast.2019.105437
|
| [50] |
Q. Zhao and G. R. Duan, “Concurrent learning adaptive finite-time control for spacecraft with inertia parameter identification under external disturbance,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 6, pp. 3691–3704, Dec. 2021. doi: 10.1109/TAES.2021.3082705
|
| [51] |
X. Y. Lang and A. de Ruiter, “Distributed optimal control allocation for 6-DOF spacecraft with redundant thrusters,” Aerosp. Sci. Technol., vol. 118, p. 106971, Nov. 2021. doi: 10.1016/j.ast.2021.106971
|
| [52] |
A. Taheri and N. Assadian, “Dynamic-programming-based failure-tolerant control for satellite with thrusters in 6-DOF motion,” Adv. Space Res., vol. 65, no. 12, pp. 2857–2877, Jun. 2020. doi: 10.1016/j.asr.2020.03.021
|
| [53] |
D. Henry, J. Zenteno-Torres, J. Cieslak, A. F. De Loza, and J. Dávila, “A 6-DOF sliding mode fault tolerant control solution for in-orbit autonomous rendezvous,” Aerosp. Sci. Technol., vol. 118, p. 107050, Nov. 2021. doi: 10.1016/j.ast.2021.107050
|
| [54] |
F. Curti, M. Romano, and R. Bevilacqua, “Lyapunov-based thrusters’ selection for spacecraft control: Analysis and experimentation,” J. Guid.,Control,Dyn., vol. 33, no. 4, pp. 1143–1160, Jul. 2010. doi: 10.2514/1.47296
|
| [55] |
M. Massari and M. Zamaro, “Application of SDRE technique to orbital and attitude control of spacecraft formation flying,” Acta Astronaut., vol. 94, no. 1, pp. 409–420, Jan.–Feb. 2014. doi: 10.1016/j.actaastro.2013.02.001
|
| [56] |
Y. Eun, S. Y. Park, T. Lee, and G. N. Kim, “Experimental validation of positive adaptive-control approach for spacecraft proximity maneuvers,” J. Aerosp. Eng., vol. 34, no. 6, p. 04021096, Nov. 2021. doi: 10.1061/(ASCE)AS.1943-5525.0001348
|
| [57] |
K. W. Xia, Y. Eun, T. Lee, and S. Y. Park, “Integrated adaptive control for spacecraft attitude and orbit tracking using disturbance observer,” Int. J. Aeronaut. Space Sci., vol. 22, no. 4, pp. 936–947, Feb. 2021. doi: 10.1007/s42405-021-00359-x
|
| [58] |
T. J. Kelly, “A review of the apollo lunar module program and its lessons for future space missions,” in Proc. AIAA Space Programs and Technologies Conf., Huntsville, USA, 1990.
|
| [59] |
A. Ceresetti and P. Tamburini, “Automated transfer vehicle—A European versatile multi-mission vehicle,” in Proc. AIAA Space Programs and Technologies Conf. Exhibit, Huntsville, USA, 1994.
|
| [60] |
I. Kawano, M. Mokuno, T. Kasai, and T. Suzuki, “Result of autonomous rendezvous docking experiment of engineering test satellite-VII,” J. Spacecr. Rockets, vol. 38, no. 1, pp. 105–111, Jan. 2001. doi: 10.2514/2.3661
|
| [61] |
Y. C. Xie, J. Hu, M. Wang, H. Hu, and H. Zhao, “Accurate and stable control of shenzhou spacecraft in rendezvous and docking,” in Proc. 19th IFAC Symp. Automatic Control in Aerospace, Wurzburg, Germany, 2003.
|
| [62] |
T. R. Krogstad and J. T. Gravdahl, “6-DOF mutual synchronization of formation flying spacecraft,” in Proc. 45th IEEE Conf. Decision and Control, San Diego, USA, 2006, pp. 5706–5711.
|
| [63] |
E. Capello, E. Punta, F. Dabbene, G. Guglieri, and R. Tempo, “Sliding-mode control strategies for rendezvous and docking maneuvers,” J. Guid.,Control,Dyn., vol. 40, no. 6, pp. 1481–1487, Jun. 2017. doi: 10.2514/1.G001882
|
| [64] |
H. Y. Dong, Q. L. Hu, M. I. Friswell, and G. F. Ma, “Dual-quaternion-based fault-tolerant control for spacecraft tracking with finite-time convergence,” IEEE Trans. Control Syst. Technol., vol. 25, no. 4, pp. 1231–1242, Jul. 2017. doi: 10.1109/TCST.2016.2603070
|
| [65] |
Q. L. Hu, X. D. Shao, and W. H. Chen, “Robust fault-tolerant tracking control for spacecraft proximity operations using time-varying sliding mode,” IEEE Trans. Aerosp. Electron. Syst., vol. 54, no. 1, pp. 2–17, Feb. 2018. doi: 10.1109/TAES.2017.2729978
|
| [66] |
K. L. Austad, “The common centaur upper stage,” in Proc. 37th Joint Propulsion Conf. Exhibit, Salt Lake City, USA, 2001.
|
| [67] |
T. S. VanZweiten, J. S. Orr, J. H. Wall, and C. E. Hall, “Space launch system ascent flight control design,” in Proc. AAS Guidance, Navigation, and Control Conf., Breckenridge, USA, 2014.
|
| [68] |
S. J. Isakowitz, J. B. Hopkins, and J. P. Jr. Hopkins, Int. Reference Guide to Space Launch Systems. 4th ed. Reston, USA: AIAA Press, 2003.
|
| [69] |
H. Chen, B. Zhang, X. Wang, G. Li, and S. Zhang, “The history of China launch vehicle,” in Proc. 64th Int. Astronautical Congr., Beijing, China, 2013.
|
| [70] |
Z. Z. Sun, Y. Jia, and H. Zhang, “Technological advancements and promotion roles of Chang’e-3 lunar probe mission,” Sci. China: Technol. Sci., vol. 56, no. 11, pp. 2702–2708, Nov. 2013. doi: 10.1007/s11431-013-5377-0
|
| [71] |
Q. Wang and J. Z. Liu, “A Chang’e-4 mission concept and vision of future Chinese lunar exploration activities,” Acta Astronaut., vol. 127, pp. 678–683, Oct.–Nov. 2016. doi: 10.1016/j.actaastro.2016.06.024
|
| [72] |
Y. J. Zhou and C. M. Ye, “The development and progress of Yuanzheng upper stage technology,” Astronaut. Syst. Eng. Technol., vol. 4, no. 6, pp. 9–15, Nov. 2020.
|
| [73] |
L. Sun and W. Huo, “6-DOF integrated adaptive backstepping control for spacecraft proximity operations,” IEEE Trans. Aerosp. Electron. Syst., vol. 51, no. 3, pp. 2433–2443, Jul. 2015. doi: 10.1109/TAES.2015.140339
|
| [74] |
L. Sun and W. Huo, “Robust adaptive relative position tracking and attitude synchronization for spacecraft rendezvous,” Aerosp. Sci. Technol., vol. 41, pp. 28–35, Feb. 2015. doi: 10.1016/j.ast.2014.11.013
|
| [75] |
L. Sun, W. Huo, and Z. X. Jiao, “Robust adaptive relative position and attitude control for spacecraft autonomous proximity,” ISA Trans., vol. 63, pp. 11–19, Jul. 2016. doi: 10.1016/j.isatra.2016.02.022
|
| [76] |
L. Sun and Z. W. Zheng, “Adaptive relative pose control for autonomous spacecraft rendezvous and proximity operations with thrust misalignment and model uncertainties,” Adv. Space Res., vol. 59, no. 7, pp. 1861–1871, Apr. 2017. doi: 10.1016/j.asr.2017.01.005
|
| [77] |
Y. Wang and S. J. Xu, “Relative equilibria of full dynamics of a rigid body with gravitational orbit-attitude coupling in a uniformly rotating second degree and order gravity field,” Astrophys. Space Sci., vol. 354, no. 2, pp. 339–353, Dec. 2014. doi: 10.1007/s10509-014-2077-6
|
| [78] |
Y. Wang and S. J. Xu, “Gravitational orbit-rotation coupling of a rigid satellite around a spheroid planet,” J. Aerosp. Eng., vol. 27, no. 1, pp. 140–150, Jan. 2014. doi: 10.1061/(ASCE)AS.1943-5525.0000222
|
| [79] |
X. S. Liu, P. Zhang, K. P. Liu, and Y. C. Li, “Compensator-based 6-DOF control for probe asteroid-orbital-frame hovering with actuator limitations,” Adv. Space Res., vol. 57, no. 9, pp. 1914–1927, May 2016. doi: 10.1016/j.asr.2016.02.005
|
| [80] |
S. Kikuchi, Y. Tsuda, M. Yoshikawa, and J. Kawaguchi, “Stability analysis of coupled orbit-attitude dynamics around asteroids using finite-time Lyapunov exponents,” J. Guid.,Control,Dyn., vol. 42, no. 6, pp. 1289–1305, Jun. 2019. doi: 10.2514/1.G003879
|
| [81] |
H. Wong, H. Z. Pan, and V. Kapila, “Output feedback control for spacecraft formation flying with coupled translation and attitude dynamics,” in Proc. American Control Conf., Portland, USA, 2005, pp. 2419–2426.
|
| [82] |
W. Hong, “Formation design and nonlinear control of spacecraft formation flying,” Ph.D. dissertation, Polytech. Univ., 2006.
|
| [83] |
K. Subbarao and S. Welsh, “Nonlinear control of motion synchronization for satellite proximity operations,” J. Guid.,Control,Dyn., vol. 31, no. 5, pp. 1284–1294, Sept. 2008. doi: 10.2514/1.34248
|
| [84] |
Y. K. Li, Z. L. Jing, and S. Q. Hu, “Dynamic optimal sliding-mode control for six-DOF follow-up robust tracking of active satellite,” Acta Astronaut., vol. 69, no. 7-8, pp. 559–570, Sep.–Oct. 2011. doi: 10.1016/j.actaastro.2011.05.003
|
| [85] |
D. Lee, G. Vukovich, and H. C. Gui, “Adaptive variable-structure finite-time mode control for spacecraft proximity operations with actuator saturation,” Adv. Space Res., vol. 59, no. 10, pp. 2473–2487, May 2017. doi: 10.1016/j.asr.2017.02.029
|
| [86] |
B. Shasti, A. Alasty, and N. Assadian, “Robust distributed control of spacecraft formation flying with adaptive network topology,” Acta Astronaut., vol. 136, pp. 281–296, Jul. 2017. doi: 10.1016/j.actaastro.2017.03.001
|
| [87] |
Q. J. Li, B. Wang, Z. C. Deng, H. J. Ouyang, and Y. Wei, “A simple orbit-attitude coupled modelling method for large solar power satellites,” Acta Astronaut., vol. 145, pp. 83–92, Apr. 2018. doi: 10.1016/j.actaastro.2017.12.037
|
| [88] |
Q. J. Li and Z. C. Deng, “Coordinated orbit-attitude-vibration control of a sun-facing solar power satellite,” J. Guid.,Control,Dyn., vol. 42, no. 8, pp. 1863–1869, Aug. 2019. doi: 10.2514/1.G004202
|
| [89] |
Y. Wei, Q. J. Li, and F. N. Xu, “Orbit-attitude-vibration coupled dynamics of tethered solar power satellite,” Adv. Space Res., vol. 67, no. 1, pp. 393–400, Jan. 2021. doi: 10.1016/j.asr.2020.09.036
|
| [90] |
M. Lisano, “A practical six-degree-of-freedom solar sail dynamics model for optimizing solar sail trajectories with torque constraints,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, Providence, USA, 2004.
|
| [91] |
D. A. Lawrence and S. W. Piggott, “Integrated trajectory and attitude control for a four-vane solar sail,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, San Francisco, USA, 2005.
|
| [92] |
S. P. Gong, H. X. Baoyin, and J. F. Li, “Coupled attitude-orbit dynamics and control for displaced solar orbits,” Acta Astronaut., vol. 65, no. 5–6, pp. 730–737, Sep.-Oct. 2009. doi: 10.1016/j.actaastro.2009.03.006
|
| [93] |
J. S. Mu, S. P. Gong, and J. F. Li, “Coupled control of reflectivity modulated solar sail for GeoSail formation flying,” J. Guid.,Control,Dyn., vol. 38, no. 4, pp. 740–751, Apr. 2015. doi: 10.2514/1.G000117
|
| [94] |
J. D. Biggs and A. Negri, “Orbit-attitude control in a circular restricted three-body problem using distributed reflectivity devices,” J. Guid.,Control,Dyn., vol. 42, no. 12, pp. 2712–2721, Dec. 2019. doi: 10.2514/1.G004493
|
| [95] |
R. Zhong and Z. H. Zhu, “Optimal control of nanosatellite fast deorbit using electrodynamic tether,” J. Guid.,Control,Dyn., vol. 37, no. 4, pp. 1182–1194, Jul. 2014. doi: 10.2514/1.62154
|
| [96] |
H. Wen, Z. H. Zhu, D. P. Jin, and H. Y. Hu, “Model predictive control with output feedback for a deorbiting electrodynamic tether system,” J. Guid.,Control,Dyn., vol. 39, no. 10, pp. 2455–2460, Oct. 2016. doi: 10.2514/1.G000535
|
| [97] |
F. Zhang, “Performance and applicability of orbital transfer with bare electrodynamic tether,” J. Spacecr. Rockets, vol. 56, no. 1, pp. 21–32, Jan. 2019. doi: 10.2514/1.A34127
|
| [98] |
X. Huang, Z. You, L. L. Chen, and J. L. Yu, “Coupled relative orbit and attitude control augmented by the geomagnetic lorentz propulsions,” J. Guid.,Control,Dyn., vol. 44, no. 6, pp. 1143–1156, Jun. 2021. doi: 10.2514/1.G005212
|
| [99] |
R. Kristiansen, E. I. Grøtli, P. J. Nicklasson, and J. T. Gravdahl, “A model of relative translation and rotation in leader-follower spacecraft formations,” Model.,Identif. Control, vol. 28, no. 1, pp. 3–14, Jan. 2007. doi: 10.4173/mic.2007.1.1
|
| [100] |
R. Kristiansen, P. J. Nicklasson, and J. T. Gravdahl, “Spacecraft coordination control in 6DOF: Integrator backstepping vs passivity-based control,” Automatica, vol. 44, no. 11, pp. 2896–2901, Nov. 2008. doi: 10.1016/j.automatica.2008.04.019
|
| [101] |
V. Manikonda, P. O. Arambel, M. Gopinathan, R. K. Mehra, and F. Y. Hadaegh, “A model predictive control-based approach for spacecraft formation keeping and attitude control,” in Proc. American Control Conf., San Diego, USA, 1999, pp. 4258–4262.
|
| [102] |
Y. Y. Zhang, J. C. Huang, and H. T. Cui, “Trajectory design via convex optimization for six-degree-of-freedom asteroid powered landing,” J. Guid.,Control,Dyn., vol. 44, no. 4, pp. 779–792, Apr. 2021. doi: 10.2514/1.G004434
|
| [103] |
Z. B. Liu, Y. K. Zhu, and J. Z. Qiao, “Composite anti-disturbance position and attitude control for spacecrafts with parametric uncertainty and flexible vibration,” Chin. J. Aeronaut., vol.35, no.12, 2022.
|
| [104] |
F. Zhang and N. Yan, “Manipulator-actuated adaptive integrated translational and rotational stabilization for proximity operations of spacecraft,” in Proc. 43rd Annu. Conf. IEEE Industrial Electronics Society, Beijing, China, 2017, pp. 6223–6228.
|
| [105] |
F. Zhang and G. R. Duan, “Manipulator-actuated adaptive integrated translational and rotational stabilization for spacecraft in proximity operations with control constraint,” Int. J. Control,Autom. Syst., vol. 16, no. 5, pp. 2103–2113, Jul. 2018. doi: 10.1007/s12555-017-0689-7
|
| [106] |
F. Zhang, Y. Li, and N. Yan, “Dual manipulator-actuated integrated translational and rotational stabilization of spacecraft in proximity operations,” Trans. Japan Soc. Aeronaut. Space Sci., vol. 63, no. 5, pp. 195–205, Jan. 2020. doi: 10.2322/tjsass.63.195
|
| [107] |
F. Zhang, “Adaptive dynamic control for manipulator actuated integrated translation and rotation stabilization of spacecraft,” IEEE Access, vol. 8, pp. 193154–193167, Oct. 2020. doi: 10.1109/ACCESS.2020.3026827
|
| [108] |
F. Zhang, “Capability analysis for manipulator-actuated integrated translational and rotational control strategy of spacecraft,” in Proc. 71st Int. Aeronautical Congr., 2020.
|
| [109] |
F. Zhang and G. R. Duan, “Manipulator actuated integrated position and attitude stabilization of spacecraft subject to external disturbances,” IEEE Trans. Syst., Man, Cybern.: Syst., vol.52, no.11, pp. 6886–6905, 2022.
|
| [110] |
K. Yamanaka, “Simultaneous translation and rotation control law for formation flying satellites,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, Denver, USA, 2000.
|
| [111] |
M. Xin, S. Balakrishnan, and H. J. Pernicka, “Position and attitude control of deep-space spacecraft formation flying via virtual structure and θ-D technique,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, San Francisco, USA, 2005.
|
| [112] |
P. Singla, K. Subbarao, and J. L. Junkins, “Adaptive output feedback control for spacecraft rendezvous and docking under measurement uncertainty,” J. Guid.,Control,Dyn., vol. 29, no. 4, pp. 892–902, Jul. 2006. doi: 10.2514/1.17498
|
| [113] |
M. Xin, S. Balakrishnan, and H. J. Pernicka, “Position and attitude control of deep-space spacecraft formation flying via virtual structure and θ-D technique,” J. Dyn. Syst. Meas. Control, vol. 129, no. 5, pp. 689–698, Sept. 2007. doi: 10.1115/1.2764509
|
| [114] |
N. K. Lincoln and S. M. Veres, “Six degree of freedom variable hierarchy sliding mode control in halo orbits with potential function guidance,” in Proc. 47th IEEE Conf. Decision and Control, Cancun, Mexico, 2008, pp. 1943–1949.
|
| [115] |
M. Xin and H. J. Pan, “Nonlinear optimal control of spacecraft approaching a tumbling target,” in Proc. Conf. American Control Conf., St. Louis, USA, 2009, pp. 4818–4823.
|
| [116] |
M. Xin and H. J. Pan, “Integrated control of position, attitude, and flexible motion for satellite proximity operations,” in Proc. AIAA Guidance, Navigation, and Control Conf., Chicago, USA, 2009.
|
| [117] |
M. Xin and H. J. Pan, “Integrated nonlinear optimal control of spacecraft in proximity operations,” Int. J. Control, vol. 83, no. 2, pp. 347–363, Feb. 2010. doi: 10.1080/00207170903171314
|
| [118] |
H. B. Sun, S. H. Li, and S. M. Fei, “A composite control scheme for 6DOF spacecraft formation control,” Acta Astronaut., vol. 69, no. 7–8, pp. 595–611, Sep.–Oct. 2011. doi: 10.1016/j.actaastro.2011.04.009
|
| [119] |
G. Boyarko, O. Yakimenko, and M. Romano, “Optimal rendezvous trajectories of a controlled spacecraft and a tumbling object,” J. Guid.,Control,Dyn., vol. 34, no. 4, pp. 1239–1252, Jul. 2011. doi: 10.2514/1.47645
|
| [120] |
Y. Y. Lv, Q. L. Hu, G. F. Ma, and J. K. Zhou, “6 DOF synchronized control for spacecraft formation flying with input constraint and parameter uncertainties,” ISA Trans., vol. 50, no. 4, pp. 573–580, Oct. 2011. doi: 10.1016/j.isatra.2011.04.001
|
| [121] |
M. Xin and H. J. Pan, “Nonlinear optimal control of spacecraft approaching a tumbling target,” Aerosp. Sci. Technol., vol. 15, no. 2, pp. 79–89, Mar. 2011. doi: 10.1016/j.ast.2010.05.009
|
| [122] |
M. Xin and H. J. Pan, “Indirect robust control of spacecraft via optimal control solution,” IEEE Trans. Aerosp. Electron. Syst., vol. 48, no. 2, pp. 1798–1809, Apr. 2012. doi: 10.1109/TAES.2012.6178102
|
| [123] |
F. Zhang and G. R. Duan, “Integrated relative position and attitude control of spacecraft in proximity operation missions,” Int. J. Autom. Comput., vol. 9, no. 4, pp. 342–351, Aug. 2012. doi: 10.1007/s11633-012-0654-0
|
| [124] |
D. Lee, J. E. Jr. Cochran, and T. S. No, “Robust position and attitude control for spacecraft formation flying,” J. Aerosp. Eng., vol. 25, no. 3, pp. 436–447, Jul. 2012. doi: 10.1061/(ASCE)AS.1943-5525.0000146
|
| [125] |
B. Q. Zhang, S. M. Song, and X. L. Chen, “Decentralized robust coordinated control for formation flying spacecraft with coupled attitude and translational dynamics,” Proc. Inst. Mech. Eng.,Part G: J. Aerosp. Eng., vol. 227, no. 5, pp. 798–815, May 2013. doi: 10.1177/0954410012442606
|
| [126] |
D. Lee, H. Bang, E. A. Butcher, and S. K. Amit, “Kinematically coupled relative spacecraft motion control using the state-dependent Riccati equation method,” J. Aerosp. Eng., vol. 28, no. 4, p. 04014099, Jul. 2015. doi: 10.1061/(ASCE)AS.1943-5525.0000436
|
| [127] |
R. R. Xu, H. B. Ji, K. Li, Y. Kang, and K. H. Yang, “Relative position and attitude coupled control with finite-time convergence for spacecraft rendezvous and docking,” in Proc. 54th IEEE Conf. Decision and Control, Osaka, Japan, 2015, pp. 3427–3432.
|
| [128] |
Q. X. Lan, J. Yang, S. H. Li, and H. B. Sun, “Finite-time control for 6DOF spacecraft formation flying systems,” J. Aerosp. Eng., vol. 28, no. 5, p. 04014137, Sept. 2015. doi: 10.1061/(ASCE)AS.1943-5525.0000476
|
| [129] |
Y. Huang, Y. M. Jia, and F. Matsuno, “Robust H∞ control for spacecraft formation flying with coupled translational and rotation dynamics,” in Proc. American Control Conf., Boston, USA, 2016, pp. 4059–4064.
|
| [130] |
Y. Huang and Y. M. Jia, “Nonlinear robust H∞ tracking control for 6 DOF spacecraft formation with input saturation,” in Proc. IEEE 55th Conf. Decision and Control, Las Vegas, USA, 2016, pp. 628–633.
|
| [131] |
Y. Huang and Y. M. Jia, “Distributed finite-time output feedback synchronisation control for six DOF spacecraft formation subject to input saturation,” IET Control Theory Appl., vol. 12, no. 4, pp. 532–542, Mar. 2018. doi: 10.1049/iet-cta.2017.0842
|
| [132] |
Y. Chen, Z. He, D. Zhou, Z. H. Yu, and S. K, L i, “Integrated guidance and control for microsatellite real-time automated proximity operations,” Acta Astronaut., vol. 148, pp. 175–185, Jul. 2018. doi: 10.1016/j.actaastro.2018.04.054
|
| [133] |
H. Yan, S. Tan, and Y. C. Xie, “Integrated translational and rotational control for the final approach phase of rendezvous and docking,” Asian J. Control, vol. 20, no. 5, pp. 1967–1978, Sept. 2018. doi: 10.1002/asjc.1712
|
| [134] |
D. Zhou, Y. Q. Zhang, and S. L. Li, “Receding horizon guidance and control using sequential convex programming for spacecraft 6-DOF close proximity,” Aerosp. Sci. Technol., vol. 87, pp. 459–477, Apr. 2019. doi: 10.1016/j.ast.2019.02.041
|
| [135] |
A. T. Harris, C. D. Petersen, and H. Schaub, “Linear coupled attitude-orbit control through aerodynamic drag,” J. Guid.,Control,Dyn., vol. 43, no. 1, pp. 122–131, Jan. 2020. doi: 10.2514/1.G004521
|
| [136] |
B. Z. Zhou, X. F. Liu, and G. P. Cai, “Robust adaptive position and attitude-tracking controller for satellite proximity operations,” Acta Astronaut., vol. 167, pp. 135–145, Feb. 2020. doi: 10.1016/j.actaastro.2019.10.035
|
| [137] |
C. Sun, J. P. Yuan, and Z. X. Zhu, “Neural adaptive control for a ground experiment of the space proximity operation in a six-degree-of-freedom micro-gravity simulation system,” Chin. J. Aeronaut., vol. 33, no. 9, pp. 2420–2433, Sept. 2020. doi: 10.1016/j.cja.2020.01.017
|
| [138] |
L. M. Fan and H. Huang, “Coordinative coupled attitude and orbit control for satellite formation with multiple uncertainties and actuator saturation,” Acta Astronaut., vol. 181, pp. 325–335, Apr. 2021. doi: 10.1016/j.actaastro.2021.01.039
|
| [139] |
J. Shan, “Six-degree-of-freedom synchronised adaptive learning control for spacecraft formation flying,” IET Control Theory Appl., vol. 2, no. 10, pp. 930–949, Oct. 2008. doi: 10.1049/iet-cta:20080063
|
| [140] |
S. J. Chung, U. Ahsun, and J. J. E. Slotine, “Application of synchronization to formation flying spacecraft: Lagrangian approach,” J. Guid.,Control,Dyn., vol. 32, no. 2, pp. 512–526, Mar. 2009. doi: 10.2514/1.37261
|
| [141] |
H. Min, S. Wang, F. Sun, Z. Gao, and Y. Wang, “Distributed six degree-of-reedom spacecraft formation control with possible switching topology,” IET Control Theory Appl., vol. 5, no. 9, pp. 1120–1130, Jun. 2011. doi: 10.1049/iet-cta.2010.0139
|
| [142] |
C. Pukdeboon and P. Kumam, “Robust optimal sliding mode control for spacecraft position and attitude maneuvers,” Aerosp. Sci. Technol., vol. 43, pp. 329–342, Jun. 2015. doi: 10.1016/j.ast.2015.03.012
|
| [143] |
C. Pukdeboon, “Inverse optimal sliding mode control of spacecraft with coupled translation and attitude dynamics,” Int. J. Syst. Sci., vol. 46, no. 13, pp. 2421–2438, Feb. 2015. doi: 10.1080/00207721.2015.1011251
|
| [144] |
L. Sun, “Passivity-based adaptive finite-time trajectory tracking control for spacecraft proximity operations,” J. Spacecr. Rockets, vol. 53, no. 1, pp. 46–56, Jan. 2016. doi: 10.2514/1.A33288
|
| [145] |
L. Sun, W. Huo, and Z. X. Jiao, “Robust nonlinear adaptive relative pose control for cooperative spacecraft during rendezvous and proximity operations,” IEEE Trans. Control Syst. Technol., vol. 25, no. 5, pp. 1840–1847, Sept. 2017. doi: 10.1109/TCST.2016.2618907
|
| [146] |
L. Sun and Z. W. Zheng, “Adaptive relative pose control of spacecraft with model couplings and uncertainties,” Acta Astronaut., vol. 143, pp. 29–36, Feb. 2018. doi: 10.1016/j.actaastro.2017.11.006
|
| [147] |
L. Sun, “Saturated adaptive output-constrained control of cooperative spacecraft rendezvous and docking,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1462–1470, Nov. 2019.
|
| [148] |
X. H. Li, Z. B. Zhu, and S. M. Song, “Non-cooperative autonomous rendezvous and docking using artificial potentials and sliding mode control,” Proc. Inst. Mech. Eng.,Part G: J. Aerosp. Eng., vol. 233, no. 4, pp. 1171–1184, Mar. 2019. doi: 10.1177/0954410017748988
|
| [149] |
K. Liu, Y. Wang, H. B. Ji, and S. H. Wang, “Adaptive saturated tracking control for spacecraft proximity operations via integral terminal sliding mode technique,” Int. J. Robust Nonlinear Control, vol. 31, no. 18, pp. 9372–9396, Dec. 2021. doi: 10.1002/rnc.5774
|
| [150] |
Y. Wang, K. Liu, and H. B. Ji, “Adaptive robust fault-tolerant control scheme for spacecraft proximity operations under external disturbances and input saturation,” Nonlinear Dyn., vol. 108, no. 1, pp. 207–222, Mar. 2022. doi: 10.1007/s11071-021-07182-9
|
| [151] |
Y. F. Gao, D. Y. Li, and S. S. Ge, “Time-synchronized tracking control for 6-DOF spacecraft in rendezvous and docking,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 3, pp. 1676–1691, Jun. 2022. doi: 10.1109/TAES.2021.3124865
|
| [152] |
F. Terui, “Position and attitude control of a spacecraft by sliding mode control,” in Proc. American Control Conf., Philadelphia, USA, 1998, pp. 217–221.
|
| [153] |
D. T. Stansbery and J. R. Cloutier, “Position and attitude control of a spacecraft using the state-dependent riccati equation technique,” in Proc. American Control Conf., Chicago, USA, 2000, pp. 1867–1871.
|
| [154] |
H. Z. Pan and V. Kapila, “Adaptive nonlinear control for spacecraft formation flying with coupled translational and attitude dynamics,” in Proc. 40th IEEE Conf. Decision and Control, Orlando, USA, 2001, pp. 2057–2062.
|
| [155] |
M. Xin, S. N. Balakrishnan, and D. T. Stansbery, “Spacecraft position and attitude control with θ-D technique,” in Proc. 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, USA, 2004.
|
| [156] |
F. Zhang, G. Duan, and M. Hou, “Integrated relative position and attitude control of spacecraft in proximity operation missions,” International Journal of Innovative Computing,Information and Control, vol. 8, no. 5, pp. 3537–3551, 2012.
|
| [157] |
L. Sun and W. Huo, “Robust adaptive control of spacecraft proximity maneuvers under dynamic coupling and uncertainty,” Adv. Space Res., vol. 56, no. 10, pp. 2206–2217, Nov. 2015. doi: 10.1016/j.asr.2015.08.029
|
| [158] |
L. Sun and W. Huo, “Robust adaptive backstepping control for autonomous spacecraft proximity maneuvers,” Int. J. Control,Autom. Syst., vol. 14, pp. 753–762, Jun. 2016. doi: 10.1007/s12555-015-0089-9
|
| [159] |
L. Sun, W. Huo, and Z. X. Jiao, “Adaptive nonlinear robust relative pose control of spacecraft autonomous rendezvous and proximity operations,” ISA Trans., vol. 67, pp. 47–55, Mar. 2017. doi: 10.1016/j.isatra.2016.11.022
|
| [160] |
L. Sun and W. Huo, “Adaptive robust control with L2-gain performance for autonomous spacecraft proximity maneuvers,” J. Spacecr. Rockets, vol. 53, no. 2, pp. 249–257, Mar. 2016. doi: 10.2514/1.A33359
|
| [161] |
K. W. Xia and W. Huo, “Robust adaptive backstepping neural networks control for spacecraft rendezvous and docking with input saturation,” ISA Trans., vol. 62, pp. 249–257, May 2016. doi: 10.1016/j.isatra.2016.01.017
|
| [162] |
K. W. Xia and W. Huo, “Disturbance observer based fault-tolerant control for cooperative spacecraft rendezvous and docking with input saturation,” Nonlinear Dyn., vol. 88, no. 4, pp. 2735–2745, Jun. 2017. doi: 10.1007/s11071-017-3407-3
|
| [163] |
L. Sun, W. Huo, and Z. X. Jiao, “Adaptive backstepping control of spacecraft rendezvous and proximity operations with input saturation and full-state constraint,” IEEE Trans. Ind. Electron., vol. 64, no. 1, pp. 480–492, Jan. 2017. doi: 10.1109/TIE.2016.2609399
|
| [164] |
L. Sun and Z. W. Zheng, “Disturbance observer-based robust saturated control for spacecraft proximity maneuvers,” IEEE Trans. Control Syst. Technol., vol. 26, no. 2, pp. 684–692, Mar. 2018. doi: 10.1109/TCST.2017.2669145
|
| [165] |
Q. Li, J. P. Yuan, and H. Wang, “Sliding mode control for autonomous spacecraft rendezvous with collision avoidance,” Acta Astronaut., vol. 151, pp. 743–751, Oct. 2018. doi: 10.1016/j.actaastro.2018.07.006
|
| [166] |
Y. Huang and Y. M. Jia, “Robust adaptive fixed-time tracking control of 6-DOF spacecraft fly-around mission for noncooperative target,” Int. J. Robust Nonlinear Control, vol. 28, no. 6, pp. 2598–2618, Apr. 2018. doi: 10.1002/rnc.4038
|
| [167] |
K. W. Xia and S. Y. Park, “Adaptive control for spacecraft rendezvous subject to time-varying inertial parameters and actuator faults,” J. Aerosp. Eng., vol. 32, no. 5, p. 04019063, Sept. 2019. doi: 10.1061/(ASCE)AS.1943-5525.0001040
|
| [168] |
K. W. Xia and Y. Zou, “Adaptive fixed-time fault-tolerant control for noncooperative spacecraft proximity using relative motion information,” Nonlinear Dyn., vol. 100, no. 3, pp. 2521–2535, May 2020. doi: 10.1007/s11071-020-05634-2
|
| [169] |
Q. Zhao and G. R. Duan, “Adaptive finite-time tracking control of 6DOF spacecraft motion with inertia parameter identification,” IET Control Theory Appl., vol. 13, no. 13, pp. 2075–2085, Sept. 2019. doi: 10.1049/iet-cta.2019.0245
|
| [170] |
J. Q. Zhang, D. Ye, J. D. Biggs, and Z. W. Sun, “Finite-time relative orbit-attitude tracking control for multi-spacecraft with collision avoidance and changing network topologies,” Adv. Space Res., vol. 63, no. 3, pp. 1161–1175, Feb. 2019. doi: 10.1016/j.asr.2018.10.037
|
| [171] |
Q. Zhao and G. R. Duan, “Finite-time concurrent learning adaptive control for spacecraft with inertia parameter identification,” J. Guid.,Control,Dyn., vol. 43, no. 3, pp. 574–584, Mar. 2020. doi: 10.2514/1.G004803
|
| [172] |
Y. Liu, H. Zhang, S. Zhang, H. Li, C. Y. Li, J. Ren, M. Y. Qiu, and Q. Wu, “Minimum-learning-parameter-based fault-tolerant control for spacecraft rendezvous with unknown inertial parameters,” IEEE Access, vol. 8, pp. 151487–151499, Aug. 2020. doi: 10.1109/ACCESS.2020.3014220
|
| [173] |
X. H. Lin, X. P. Shi, and S. L. Li, “Adaptive tracking control for spacecraft formation flying system via modified fast integral terminal sliding mode surface,” IEEE Access, vol. 8, pp. 198357–198367, Nov. 2020. doi: 10.1109/ACCESS.2020.3035185
|
| [174] |
Z. L. Li, G. X. Yu, Q. J. Zhang, S. Song, and H. T. Cui, “Adaptive sliding mode control for spacecraft rendezvous with unknown system parameters and input saturation,” IEEE Access, vol. 9, pp. 67724–67733, Apr. 2021. doi: 10.1109/ACCESS.2021.3075564
|
| [175] |
K. W. Xia and Y. Zou, “Adaptive saturated fault-tolerant control for spacecraft rendezvous with redundancy thrusters,” IEEE Trans. Control Syst. Technol., vol. 29, no. 2, pp. 502–513, Mar. 2021. doi: 10.1109/TCST.2019.2950399
|
| [176] |
G. Misra, M. Izadi, A. Sanyal, and D. Scheeres, “Coupled orbit-attitude dynamics and relative state estimation of spacecraft near small Solar System bodies,” Adv. Space Res., vol. 57, no. 8, pp. 1747–1761, Apr. 2016. doi: 10.1016/j.asr.2015.05.023
|
| [177] |
K. W. Xia and Y. Zou, “Neuroadaptive saturated control for relative motion based noncooperative spacecraft proximity with prescribed performance,” Acta Astronaut., vol. 180, pp. 361–369, Mar. 2021. doi: 10.1016/j.actaastro.2020.12.052
|
| [178] |
Y. Hao, Z. X. Lin, Z. Y. Su, Y. F. Xiao, and B. Huang, “Robust adaptive control for spacecraft rendezvous with predefined-time prescribed performance and input saturation,” J. Aerosp. Eng., vol. 35, no. 1, p. 06021007, Jan. 2022. doi: 10.1061/(ASCE)AS.1943-5525.0001353
|
| [179] |
L. Sun and J. J. Jiang, “Adaptive control of space proximity missions with constrained relative states, faults and saturation,” Acta Astronaut., vol. 174, pp. 211–218, Sept. 2020. doi: 10.1016/j.actaastro.2020.05.016
|
| [180] |
X. D. Shao and Q. L. Hu, “Immersion and invariance adaptive pose control for spacecraft proximity operations under kinematic and dynamic constraints,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 4, pp. 2183–2200, Aug. 2021. doi: 10.1109/TAES.2021.3053134
|
| [181] |
Y. Yoshimura, T. Matsuno, and S. Hokamoto, “Global trajectory design for position and attitude control of an underactuated satellite,” Trans. Japan Soc. Aeronaut. Space Sci., vol. 59, no. 3, pp. 107–114, May 2016. doi: 10.2322/tjsass.59.107
|
| [182] |
N. K. Philip and M. R. Ananthasayanam, “Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft,” Acta Astronaut., vol. 52, no. 7, pp. 511–522, Apr. 2003. doi: 10.1016/S0094-5765(02)00125-X
|
| [183] |
M. Szmuk, U. Eren, and B. Acikmese, “Successive convexification for mars 6-DOF powered descent landing guidance,” in Proc. AIAA Guidance, Navigation, and Control Conf., Grapevine, USA, 2017.
|
| [184] |
M. Szmuk and B. Açımathkmeşe, “Successive convexification for 6-DOF mars rocket powered landing with free-final-time,” in Proc. AIAA Guidance, Navigation, and Control Conf., Kissimmee, USA, 2018.
|
| [185] |
B. J. Naasz, M. M. Berry, H. Y. Kim, and C. D. Hall, “Integrated orbit and attitude control for a nanosatellite with power constraints,” AAS 03-100, 2003.
|
| [186] |
S. E. Lennox, “Coupled attitude and orbital control system using spacecraft simulators,” M.S. thesis, Va. Polytech. Inst. State Univ., Blacksburg, USA, 2004.
|
| [187] |
H. K. Khalil, Nonlinear Systems. 3rd ed. New Jersey, USA: Prentice-Hall, 2002.
|
| [188] |
M. Chasles, “Note sur les propriet es g en erales du syst eme de deux crps semblables entr’eux et places d’une maniere quelcoque dans l’espace; et sur le deplacement fini ou iinfiniment petit d’un corps solide libre,” Ferussac,Bull. Sci. Math., vol. 14, pp. 321–326, 1830.
|
| [189] |
V. N. Branets and I. P. Shmyglevsky, Introduction to the Theory of Strapdown Inertial Navigation System. Moscow, Russia: Nauka, 1992.
|
| [190] |
Y, X. Wu, X. P. Hu, D. W. Hu, T. Li, and J. X. Lian, “Strapdown inertial navigation system algorithms based on dual quaternions,” IEEE Trans. Aerosp. Electron. Syst., vol. 41, no. 1, pp. 110–132, Jan. 2005. doi: 10.1109/TAES.2005.1413751
|
| [191] |
F. Zhang and G. R. Duan, “Robust integrated translation and rotation finite-time maneuver of a rigid spacecraft based on dual quaternion,” in Proc. AIAA Guidance, Navigation, and Control Conf., Portland, USA, 2011.
|
| [192] |
X. K. Wang and C. B. Yu, “Unit dual quaternion-based feedback linearization tracking problem for attitude and position dynamics,” Syst. Control Lett., vol. 62, no. 3, pp. 225–233, Mar. 2013. doi: 10.1016/j.sysconle.2012.11.019
|
| [193] |
R. C. Fan, X. Q. Chen, M. Liu, and X. B. Cao, “Attitude-orbit coupled sliding mode tracking control for spacecraft formation with event-triggered transmission,” ISA Trans., vol. 124, pp. 338–348, May 2022. doi: 10.1016/j.isatra.2020.10.062
|
| [194] |
B. P. Malladi, E. A. Butcher, and R. G. Sanfelice, “Robust hybrid global asymptotic stabilization of rigid body dynamics using dual quaternions,” in Proc. AIAA Guidance, Navigation, and Control Conf., Kissimmee, USA, 2018.
|
| [195] |
B. P. Malladi, E. A. Butcher, and R. G. Sanfelice, “Rigid-body pose hybrid control using dual quaternions: Global asymptotic stabilization and robustness,” J. Guid.,Control,Dyn., vol. 43, no. 9, pp. 1631–1641, Sept. 2020. doi: 10.2514/1.G004621
|
| [196] |
H. C. Gui and G. Vukovich, “Dual-quaternion-based adaptive motion tracking of spacecraft with reduced control effort,” Nonlinear Dyn., vol. 83, no. 1–2, pp. 597–614, Sept. 2016. doi: 10.1007/s11071-015-2350-4
|
| [197] |
H. C. Gui and G. Vukovich, “Finite-time output-feedback position and attitude tracking of a rigid body,” Automatica, vol. 74, pp. 270–278, Dec. 2016. doi: 10.1016/j.automatica.2016.08.003
|
| [198] |
J. Y. Wang and Z. W. Sun, “6-DOF robust adaptive terminal sliding mode control for spacecraft formation flying,” Acta Astronaut., vol. 73, pp. 76–87, Apr.–May 2012.
|
| [199] |
J. Y. Wang, H. Z. Liang, Z. W. Sun, S. J. Zhang, and M. Liu, “Finite-time control for spacecraft formation with dual-number-based description,” J. Guid.,Control,Dyn., vol. 35, no. 3, pp. 950–962, May 2012. doi: 10.2514/1.54277
|
| [200] |
J. Y. Wang, H. Z. Liang, Z. W. Sun, S. N. Wu, and S. J. Zhang, “Relative motion coupled control based on dual quaternion,” Aerosp. Sci. Technol., vol. 25, no. 1, pp. 102–113, Mar. 2013. doi: 10.1016/j.ast.2011.12.013
|
| [201] |
J. Y. Wang, H. Z. Liang, and Z. W. Sun, “Dual-quaternion-based finite-time control for spacecraft tracking in six degrees of freedom,” Proc. Inst. Mech. Eng.,Part G: J. Aerosp. Eng., vol. 227, no. 3, pp. 528–545, Mar. 2013. doi: 10.1177/0954410011434883
|
| [202] |
J. J. Wu, D. P. Han, K. Liu, and J. H. Xiang, “Nonlinear suboptimal synchronized control for relative position and relative attitude tracking of spacecraft formation flying,” J. Franklin Inst., vol. 352, no. 4, pp. 1495–1520, Apr. 2015. doi: 10.1016/j.jfranklin.2015.01.017
|
| [203] |
H. Y. Dong, Q. L. Hu, and G. F. Ma, “Dual-quaternion based fault-tolerant control for spacecraft formation flying with finite-time convergence,” ISA Trans., vol. 61, pp. 87–94, Mar. 2016. doi: 10.1016/j.isatra.2015.12.008
|
| [204] |
R. X. Liu, X. B. Cao, M. Liu, and Y. Z. Zhu, “6-DOF fixed-time adaptive tracking control for spacecraft formation flying with input quantization,” Inf. Sci., vol. 475, pp. 82–99, Feb. 2019. doi: 10.1016/j.ins.2018.09.041
|
| [205] |
H. Y. Dong, Q. L. Hu, and M. R. Akella, “Dual-quaternion-based spacecraft autonomous rendezvous and docking under six-degree-of-freedom motion constraints,” J. Guid.,Control,Dyn., vol. 41, no. 5, pp. 1150–1162, May 2018. doi: 10.2514/1.G003094
|
| [206] |
N. Filipe and P. Tsiotras, “Simultaneous position and attitude control without linear and angular velocity feedback using dual quaternions,” in Proc. American Control Conf., Washington, USA, 2013, pp. 4808-4813.
|
| [207] |
J. J. Wu, K. Liu, and D. P. Han, “Adaptive sliding mode control for six-DOF relative motion of spacecraft with input constraint,” Acta Astronaut., vol. 87, pp. 64–76, Jun.–Jul. 2013. doi: 10.1016/j.actaastro.2013.01.015
|
| [208] |
D. Seo, “Fast adaptive pose tracking control for satellites via dual quaternion upon non-certainty equivalence principle,” Acta Astronaut., vol. 115, pp. 32–39, Oct.–Nov. 2015. doi: 10.1016/j.actaastro.2015.05.013
|
| [209] |
N. Filipe and P. Tsiotras, “Adaptive position and attitude-tracking controller for satellite proximity operations using dual quaternions,” J. Guid.,Control,Dyn., vol. 38, no. 4, pp. 566–577, Apr. 2015. doi: 10.2514/1.G000054
|
| [210] |
A. Valverde and P. Tsiotras, “Relative pose stabilization using backstepping control with dual quaternions,” in Proc. Space Flight Mechanics Meeting, Kissimmee, USA, 2018.
|
| [211] |
A. Valverde and P. Tsiotras, “Spacecraft trajectory tracking with identification of mass properties using dual quaternions,” in Proc. AIAA Guidance, Navigation, and Control Conf., Kissimmee, USA, 2018.
|
| [212] |
J. T. Yang and E. Stoll, “Adaptive sliding mode control for spacecraft proximity operations based on dual quaternions,” J. Guid.,Control,Dyn., vol. 42, no. 11, pp. 2356–2368, Nov. 2019. doi: 10.2514/1.G004435
|
| [213] |
H. Y. Dong, Q. L. Hu, Y. Y. Liu, and M. R. Akella, “Adaptive pose tracking control for spacecraft proximity operations under motion constraints,” J. Guid.,Control,Dyn., vol. 42, no. 10, pp. 2258–2271, Oct. 2019. doi: 10.2514/1.G004231
|
| [214] |
Q. Q. Dang, H. C. Gui, and H. Wen, “Dual-quaternion-based spacecraft pose tracking with a global exponential velocity observer,” J. Guid.,Control,Dyn., vol. 42, no. 9, pp. 2106–2115, Sept. 2019. doi: 10.2514/1.G004302
|
| [215] |
X. Zhu, J. L. Chen, and Z. H. Zhu, “Adaptive sliding mode disturbance observer-based control for rendezvous with non-cooperative spacecraft,” Acta Astronaut., vol. 183, pp. 59–74, Jun. 2021. doi: 10.1016/j.actaastro.2021.03.005
|
| [216] |
X. Y. Zhu, Z. H. Zhu, and J. L. Chen, “Dual quaternion-based adaptive iterative learning control for flexible spacecraft rendezvous,” Acta Astronaut., vol. 189, pp. 99–118, Dec. 2021. doi: 10.1016/j.actaastro.2021.08.040
|
| [217] |
Q. L. Hu, H. Y. Yang, H. Y. Dong, and X. W. Zhao, “Learning-based 6-DOF control for autonomous proximity operations under motion constraints,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 6, pp. 4097–4109, Dec. 2021. doi: 10.1109/TAES.2021.3094628
|
| [218] |
C. Q. Sun, Y. Xiao, Z. W. Sun, and D. Ye, “Dual quaternion based close proximity operation for in-orbit assembly via model predictive control,” Int. J. Aerosp. Eng., vol. 2021, p. 1305095, Nov. 2021.
|
| [219] |
X. P. Shi, X. Peng, and Y. P. Gong, “Immersion and invariance adaptive control for spacecraft pose tracking via dual quaternions,” Complexity, vol. 2021, p. 6624222, Apr. 2021.
|
| [220] |
C. H. Li, H. G. Zou, D. W. Shi, J. L. Song, and J. Z. Wang, “Proportional-integral-type event-triggered coupled attitude and orbit tracking control using dual quaternions,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 4, pp. 3021–3036, Aug. 2022. doi: 10.1109/TAES.2022.3143475
|
| [221] |
L. Y. Wang, Y. N. Guo, G. F. Ma, and H. B. Zhang, “Artificial potential function based spacecraft proximity maneuver 6-DOF control under multiple pyramid-type constraints,” ISA Trans., vol. 126, pp. 316–325, Jul. 2022. doi: 10.1016/j.isatra.2021.08.003
|
| [222] |
U. Lee and M. Mesbahi, “Dual quaternions, rigid body mechanics, and powered-descent guidance,” in Proc. IEEE 51st Conf. Decision and Control, Maui, USA, 2012, pp. 3386–3391.
|
| [223] |
U. Lee and M. Mesbahi, “Optimal power descent guidance with 6-DoF line of sight constraints via unit dual quaternions,” in Proc. AIAA Guidance, Navigation, and Control Conf., Kissimmee, USA, 2015.
|
| [224] |
J. W. Kwon, D. Lee, and H. Bang, “Virtual trajectory augmented landing control based on dual quaternion for lunar lander,” J. Guid.,Control,Dyn., vol. 39, no. 9, pp. 2044–2057, Sept. 2016. doi: 10.2514/1.G001459
|
| [225] |
T. P. Reynolds, M. Szmuk, D. Malyuta, M. Mesbahi, B. Açımathkmeşe, and J. M. Carson III, “Dual quaternion-based powered descent guidance with state-triggered constraints,” J. Guid.,Control,Dyn., vol. 43, no. 9, pp. 1584–1599, Sept. 2020. doi: 10.2514/1.G004536
|
| [226] |
A. Sanyal, L. Holguin, and S. P. Viswanathan, “Guidance and control for spacecraft autonomous chasing and close proximity maneuvers,” IFAC Proc. Vol., vol. 45, no. 13, pp. 753–758, Jun. 2012. doi: 10.3182/20120620-3-DK-2025.00068
|
| [227] |
D. Lee, A. K. Sanyal, and E. A. Butcher, “Asymptotic tracking control for spacecraft formation flying with decentralized collision avoidance,” J. Guid.,Control,Dyn., vol. 38, no. 4, pp. 587–600, Apr. 2015. doi: 10.2514/1.G000101
|
| [228] |
J. Q. Zhang, J. D. Biggs, D. Ye, and Z. W. Sun, “Extended-state-observer-based event-triggered orbit-attitude tracking for low-thrust spacecraft,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 4, pp. 2872–2883, Aug. 2020. doi: 10.1109/TAES.2019.2955257
|
| [229] |
D. Lee, A. K. Sanyal, E. A. Butcher, and D. J. Scheeres, “Almost global asymptotic tracking control for spacecraft body-fixed hovering over an asteroid,” Aerosp. Sci. Technol., vol. 38, pp. 105–115, Oct. 2014. doi: 10.1016/j.ast.2014.07.013
|
| [230] |
D. Lee, “Spacecraft coupled tracking maneuver using sliding mode control with input saturation,” J. Aerosp. Eng., vol. 28, no. 5, p. 04014136, Sept. 2015. doi: 10.1061/(ASCE)AS.1943-5525.0000473
|
| [231] |
D. Lee and G. Vukovich, “Adaptive sliding mode control for spacecraft body-fixed hovering in the proximity of an asteroid,” Aerosp. Sci. Technol., vol. 46, pp. 471–483, Oct.–Nov. 2015. doi: 10.1016/j.ast.2015.09.001
|
| [232] |
S. Zhang and Z. Yang, “Adaptive finite-time control on SE(3) for spacecraft final proximity maneuvers with input quantization,” Int. J. Aerosp. Eng., vol. 2021, p. 7423919, Sept. 2021.
|
| [233] |
K. J. Gong, Y. Liao, and Y. Wang, “Adaptive fixed-time terminal sliding mode control on SE(3) for coupled spacecraft tracking maneuver,” Int. J. Aerosp. Eng., vol. 2020, p. 3085495, Feb. 2020.
|
| [234] |
Y. F. Mei, Y. Liao, K. J. Gong, and D. Luo, “Adaptive fuzzy modified fixed-time fault-tolerant control on SE(3) for coupled spacecraft,” Math. Probl. Eng., vol. 2021, p. 6648578, Jan. 2021.
|
| [235] |
D. Lee and G. Vukovich, “Almost global finite-time stabilization of spacecraft formation flying with decentralized collision avoidance,” Int. J. Control,Autom. Syst., vol. 15, no. 3, pp. 1167–1180, May 2017. doi: 10.1007/s12555-016-0239-8
|
| [236] |
L. Jiang, Y. Wang, and S. J. Xu, “Integrated 6-DOF orbit-attitude dynamical modeling and control using geometric mechanics,” Int. J. Aerosp. Eng., vol. 2017, p. 4034328, May 2017.
|
| [237] |
D. Ye, J. Q. Zhang, and Z. W. Sun, “Extended state observer-based finite-time controller design for coupled spacecraft formation with actuator saturation,” Adv. Mech. Eng., vol. 9, no. 4, Mar. 2017.
|
| [238] |
J. Q. Zhang, D. Ye, M. Liu, and Z. W. Sun, “Adaptive fuzzy finite-time control for spacecraft formation with communication delays and changing topologies,” J. Franklin Inst., vol. 354, no. 11, pp. 4377–4403, Jul. 2017. doi: 10.1016/j.jfranklin.2017.04.018
|
| [239] |
L. Holguin, S. P. Viswanathan, and A. Sanyal, “Guidance and control for spacecraft autonomous rendezvous and proximity maneuvers using a geometric mechanics framework,” in Proc. AIAA Guidance, Navigation, and Control Conf., Minneapolis, USA, 2012.
|
| [240] |
D. Lee and G. Vukovich, “Robust adaptive terminal sliding mode control on SE(3) for autonomous spacecraft rendezvous and docking,” Nonlinear Dyn., vol. 83, no. 4, pp. 2263–2279, Mar. 2016. doi: 10.1007/s11071-015-2479-1
|
| [241] |
K. J. Gong, Y. Liao, and Y. F. Mei, “Extended state observer-based output feedback control for spacecraft pose tracking with control input saturation,” Proc. Inst. Mech. Eng.,Part G: J. Aerosp. Eng., vol. 236, no. 4, pp. 645–660, Mar. 2022. doi: 10.1177/09544100211017751
|
| [242] |
A. Sinclair, J. Hurtado, and J. Junkins, “Investigations on the use of the cayley form for feedback controller design,” in Proc. AIAA Guidance, Navigation, and Control Conf. Exhibit, Providence, USA, 2004.
|
| [243] |
A. J. Sinclair, J. E. Hurtado, and J. L. Junkins, “Application of the cayley form to general spacecraft motion,” J. Guid.,Control,Dyn., vol. 29, no. 2, pp. 368–373, Mar. 2006. doi: 10.2514/1.9910
|
| [244] |
Y. F. Deng and Z. G. Wang, “Modeling and control for spacecraft relative pose motion by using twistor representation,” J. Guid.,Control,Dyn., vol. 39, no. 5, pp. 1147–1154, May 2016. doi: 10.2514/1.G001522
|
| [245] |
Q. Li, L. Liu, Y. F. Deng, S. Tang, and Y. B. Zhao, “Twistor-based synchronous sliding mode control of spacecraft attitude and position,” Chin. J. Aeronaut., vol. 31, no. 5, pp. 1153–1164, May 2018. doi: 10.1016/j.cja.2018.03.003
|
| [246] |
B. Zhang, Y. Zhang, and J. Q. Bai, “Twistor-based adaptive pose control of spacecraft for landing on an asteroid with collision avoidance,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 1, pp. 152–167, Feb. 2022. doi: 10.1109/TAES.2021.3098159
|
| [247] |
B. Zhang and Y. L. Cai, “Twistor-based pose control for asteroid landing with path constraints,” Nonlinear Dyn., vol. 100, no. 3, pp. 2427–2448, Mar. 2020. doi: 10.1007/s11071-020-05610-w
|
| [248] |
Y. Z. Geng, J. D. Biggs, and C. J. Li, “Pose regulation via the dual unitary group: An application to spacecraft rendezvous,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 6, pp. 3734–3748, Dec. 2021. doi: 10.1109/TAES.2021.3090929
|
| [249] |
Y. Eun, S. Y. Park, and G. N. Kim, “Development of a hardware-in-the-loop testbed to demonstrate multiple spacecraft operations in proximity,” Acta Astronaut., vol. 147, pp. 48–58, Jun. 2018. doi: 10.1016/j.actaastro.2018.03.030
|
| [250] |
K. Hovell and S. Ulrich, “Deep reinforcement learning for spacecraft proximity operations guidance,” J. Spacecr. Rockets, vol. 58, no. 2, pp. 254–264, Mar. 2021. doi: 10.2514/1.A34838
|
| [251] |
K. J. Astrom and B. Wittenmark, Adaptive Control. 2nd ed. Boston, USA: Addison Wesley, 1995.
|
| [252] |
R. A. Freeman and P. V. Kokotovic, “Inverse optimality in robust stabilization,” SIAM J. Control Optim., vol. 34, no. 4, pp. 1365–1391, Jul. 1996. doi: 10.1137/S0363012993258732
|
| [253] |
A. Flores-Abad, O. Ma, K. Pham, and S. Ulrich, “A review of space robotics technologies for on-orbit servicing,” Prog. Aerosp. Sci., vol. 68, pp. 1–26, Jul. 2014.
|
| [254] |
K. Yoshida, “Engineering test satellite vii flight experiments for space robot dynamics and control: Theories on laboratory test beds ten years ago, now in orbit,” Int. J. Rob. Res., vol. 22, no. 5, pp. 312–335, May 2003.
|
| [255] |
R. S. S. Pena, R. Alonso, and P. A. Anigstein, “Robust optimal solution to the attitude/force control problem,” IEEE Trans. Aerosp. Electron. Syst., vol. 36, no. 3, pp. 784–792, Jul. 2000. doi: 10.1109/7.869496
|
| [256] |
P. A. Servidia and R. S. Pena, “Spacecraft thruster control allocation problems,” IEEE Trans. Autom. Control, vol. 50, no. 2, pp. 245–249, Feb. 2005. doi: 10.1109/TAC.2004.841923
|
| [257] |
M. Wang and Y. C. Xie, “Control capability analysis for complex spacecraft thruster configurations,” Sci. China Technol. Sci., vol. 53, no. 8, pp. 2089–2096, Aug. 2010. doi: 10.1007/s11431-010-3139-9
|
| [258] |
W. G. dos Santos, E. M. Rocco, T. Boge, H. Benninghoff, and F. Rems, “Multi-objective optimization applied to real-time command problem of spacecraft thrusters,” J. Spacecr. Rockets, vol. 52, no. 5, pp. 1407–1416, Sept. 2015. doi: 10.2514/1.A33178
|
| [259] |
Y. Yoshimura and H. Kojima, “Optimization of fault-tolerant thruster configurations for satellite control,” Adv. Space Res., vol. 61, no. 6, pp. 1617–1625, Mar. 2018. doi: 10.1016/j.asr.2018.01.014
|
| [260] |
G. R. Duan, “High-order system approaches: I. Fully-actuated systems and parametric designs,” Acta Autom. Sin., vol. 46, no. 7, pp. 1333–1345, Jul. 2020.
|
| [261] |
G. R. Duan, “High-order system approaches: II. Controllability and full-actuation,” Acta Autom. Sin., vol. 46, no. 8, pp. 1571–1581, Aug. 2020.
|
| [262] |
G. R. Duan, “High-order system approaches: III. Observability and observer design,” Acta Autom. Sin., vol. 46, no. 9, pp. 1885–1895, Sept. 2020.
|
| [263] |
G. R. Duan, “High-order fully actuated system approaches: Part I. Models and basic procedure,” Int. J. Syst. Sci., vol. 52, no. 2, pp. 422–435, Jan. 2021. doi: 10.1080/00207721.2020.1829167
|
| [264] |
G. R. Duan, “High-order fully actuated system approaches: Part II. Generalized strict-feedback systems,” Int. J. Syst. Sci., vol. 52, no. 3, pp. 437–454, Feb. 2021. doi: 10.1080/00207721.2020.1829168
|
| [265] |
G. R. Duan, “High-order fully actuated system approaches: Part III. Robust control and high-order backstepping,” Int. J. Syst. Sci., vol. 52, no. 5, pp. 952–971, Apr. 2021. doi: 10.1080/00207721.2020.1849863
|
| [266] |
G. R. Duan, “High-order fully actuated system approaches: Part IV. Adaptive control and high-order backstepping,” Int. J. Syst. Sci., vol. 52, no. 5, pp. 972–989, Apr. 2021. doi: 10.1080/00207721.2020.1849864
|
| [267] |
G. R. Duan, “High-order fully actuated system approaches: Part V. Robust adaptive control,” Int. J. Syst. Sci., vol. 52, no. 10, pp. 2129–2143, Jul. 2021. doi: 10.1080/00207721.2021.1879964
|
| [268] |
G. R. Duan, “High-order fully-actuated system approaches: Part VI. Disturbance attenuation and decoupling,” Int. J. Syst. Sci., vol. 52, no. 10, pp. 2161–2181, Jul. 2021. doi: 10.1080/00207721.2021.1879966
|
| [269] |
G. R. Duan, “High-order fully actuated system approaches: Part VII. Controllability, stabilisability and parametric designs,” Int. J. Syst. Sci., vol. 52, no. 14, pp. 3091–3114, Oct. 2021. doi: 10.1080/00207721.2021.1921307
|
| [270] |
G. R. Duan, “High-order fully actuated system approaches: Part VIII. Optimal control with application in spacecraft attitude stabilisation,” Int. J. Syst. Sci., vol. 53, no. 1, pp. 54–73, Jan. 2022. doi: 10.1080/00207721.2021.1937750
|
| [271] |
G. R. Duan, “High-order fully-actuated system approaches: Part IX. Generalised PID control and model reference tracking,” Int. J. Syst. Sci., vol. 53, no. 3, pp. 652–674, Feb. 2022. doi: 10.1080/00207721.2021.1970277
|
| [272] |
G. R. Duan, “High-order fully actuated system approaches: Part X. Basics of discrete-time systems,” Int. J. Syst. Sci., vol. 53, no. 4, pp. 810–832, Mar. 2022. doi: 10.1080/00207721.2021.1975848
|
| [273] |
W. C. Sun, Y. F. Zhang, Y. P. Huang, H. J. Gao, and O. Kaynak, “Transient-performance-guaranteed robust adaptive control and its application to precision motion control systems,” IEEE Trans. Ind. Electron., vol. 63, no. 10, pp. 6510–6518, Oct. 2016. doi: 10.1109/TIE.2016.2542787
|
Figures(8) / Tables(6)






 DownLoad:
DownLoad: