2019, 6(2): 441-451.
doi: 10.1109/JAS.2019.1911393
Abstract:
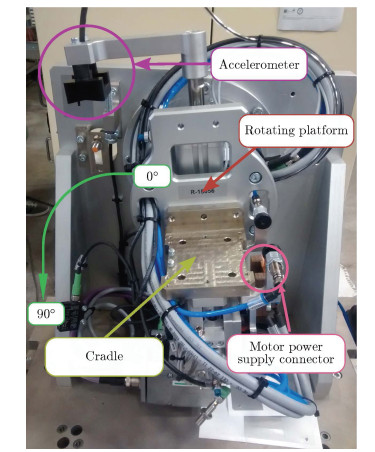
Fault diagnosis of electric motors is a fundamental task for production line testing, and it is usually performed by experienced human operators. In the recent years, several methods have been proposed in the literature for detecting faults automatically. Deep neural networks have been successfully employed for this task, but, up to the authors' knowledge, they have never been used in an unsupervised scenario. This paper proposes an unsupervised method for diagnosing faults of electric motors by using a novelty detection approach based on deep autoencoders. In the proposed method, vibration signals are acquired by using accelerometers and processed to extract Log-Mel coefficients as features. Autoencoders are trained by using normal data only, i.e., data that do not contain faults. Three different autoencoders architectures have been evaluated: the multi-layer perceptron (MLP) autoencoder, the convolutional neural network autoencoder, and the recurrent autoencoder composed of long short-term memory (LSTM) units. The experiments have been conducted by using a dataset created by the authors, and the proposed approaches have been compared to the one-class support vector machine (OC-SVM) algorithm. The performance has been evaluated in terms area under curve (AUC) of the receiver operating characteristic curve, and the results showed that all the autoencoder-based approaches outperform the OC-SVM algorithm. Moreover, the MLP autoencoder is the most performing architecture, achieving an AUC equal to 99.11%
Emanuele Principi, Damiano Rossetti, Stefano Squartini and Francesco Piazza, "Unsupervised Electric Motor Fault Detection by Using Deep Autoencoders," IEEE/CAA J. Autom. Sinica, vol. 6, no. 2, pp. 441-451, Mar. 2019. doi: 10.1109/JAS.2019.1911393.














































































































































































































 E-mail Alert
E-mail Alert